ARM平臺電機矢量控制分析及性能評估①
2017-02-20 07:40:50張玉磊王志成史秀玉鄭國利
計算機系統(tǒng)應(yīng)用 2017年1期
關(guān)鍵詞:模型
張玉磊, 王志成, 史秀玉, 鄭國利
?
ARM平臺電機矢量控制分析及性能評估①
張玉磊1,2, 王志成2,3, 史秀玉1,2, 鄭國利2,3
1(中國科學(xué)院大學(xué), 北京100049)2(中國科學(xué)院沈陽計算技術(shù)研究所高檔數(shù)控國家工程研究中心, 沈陽 110168)3(沈陽高精數(shù)控智能技術(shù)股份有限公司, 沈陽 110168)
對ARM平臺電機矢量控制模型進行了分析及性能評估, 彌補了當(dāng)前伺服控制系統(tǒng)中該評估工作的空白. 分析了電機矢量控制模型和能實現(xiàn)該模型ARM平臺的軟硬件環(huán)境, 給ARM平臺電機矢量控制分析及性能評估奠定了基礎(chǔ). 使用了一種利用建立空閑任務(wù)計算CPU負載率的方法, 并用此方法進行了以CPU負載率為性能指標的評估實驗, 對不同條件下矢量控制策略的適用情況進行了分析. 分析結(jié)果對ARM平臺下矢量控制策略的選擇有一定的指導(dǎo)意義.
矢量控制; ARM; CPU負載率; 性能評估; RTX
作為伺服電機控制的一種方式, 矢量控制已成為高性能變頻調(diào)速系統(tǒng)的首選方案. 與傳統(tǒng)采用V/F控制相比, 矢量控制存在著控制精度高, 動態(tài)性能好等特點[1]. 與之前的控制方案相比, 矢量控制方案計算復(fù)雜、對電機參數(shù)的依賴性大, 需要有較高性能的處理器作為支撐[2]. 目前, 電機控制主要使用DSP來實現(xiàn). 近年來, 隨著ARM芯片的出現(xiàn)和相關(guān)技術(shù)的飛速發(fā)展, ARM處理器核因其卓越的性能和諸多優(yōu)點, 已成為低功耗、低成本、高性能嵌入式處理器的代名詞. 將ARM芯片用于伺服電機的矢量控制, 能夠彌補DSP芯片在控制方面的不足, 在獲得更快運算速度的同時可以節(jié)約成本并降低系統(tǒng)的復(fù)雜度, 成為了伺服電機控制處理器的又一理想選擇[3,4]. 雖然ARM平臺電機矢量控制已有研究, 但是分析的不夠具體, 更沒有對ARM平臺上矢量控制的性能進行評估. 導(dǎo)致很多開發(fā)人員并不十分清楚軟硬件平臺需要滿足哪些條件, 才能在ARM平臺上實現(xiàn)矢量控制模型; 怎樣的軟硬件條件選擇才能使ARM平臺有更好的矢量控制效果. 本文選擇STM32F405ZG為硬件平臺核心, RTX為實時操作系統(tǒng), 在分析矢量控制模型以及軟硬件平臺的基礎(chǔ)上, 通過CPU負載率來評估ARM平臺上電機矢量控制的性能. 量化分析的評估結(jié)果對以后開發(fā)人員在ARM平臺矢量控制策略的選擇上有一定的指導(dǎo)意義.
1 矢量控制模型分析
矢量控制具有廣泛的應(yīng)用實踐和豐富的理論基礎(chǔ), 尤其在電機控制上. 本節(jié)主要是在矢量控制系統(tǒng)的結(jié)構(gòu)上分析矢量控制模型的核心模塊.
1.1 矢量控制系統(tǒng)結(jié)構(gòu)
圖1是矢量控制系統(tǒng)的結(jié)構(gòu)圖, 從圖中可以看出這是一個電流內(nèi)環(huán)、速度外環(huán)的雙閉環(huán)控制系統(tǒng).
1.2 核心模塊分析
電流環(huán)在電機矢量控制中有著非常重要的地位, 通過改造內(nèi)環(huán)控制對象的傳遞函數(shù), 來保證牽引系統(tǒng)的轉(zhuǎn)矩控制快速性和穩(wěn)定性[5]. 電流環(huán)的主要功能是快速響應(yīng)電流的變化, 通過將轉(zhuǎn)矩和磁通量轉(zhuǎn)換為電流矢量來動態(tài)控制其變化, 所以需要專門的軟硬件支持. 軟件模塊主要有: CLAKE變換、PARK變換、PI電流調(diào)節(jié)、IPARK變換、空間向量脈沖調(diào)制(SVPWM)等模塊, 主要是為了完成矢量控制模型的計算; 和硬件相關(guān)接口主要有(正交編碼脈沖)QEP、模數(shù)變換模塊等.
速度環(huán)是電流環(huán)的外環(huán), 其輸出可作為電流環(huán)的輸入給定[6], 通過檢測QEP模塊的輸出信號來進行反饋調(diào)節(jié). 速度環(huán)的主要組成是速度計算模塊和速度PI調(diào)節(jié)模塊, 其中速度計算模塊主要是根據(jù)反饋值進行速度計算, 而PI調(diào)節(jié)模塊主要作用是保證系統(tǒng)良好的跟蹤性和抗干擾性[7].
矢量控制策略的雙環(huán)串級控制是先內(nèi)后外的順序[8], 即首先是電流環(huán)進行轉(zhuǎn)矩和磁通分量的調(diào)節(jié), 然后是速度環(huán)根據(jù)電機電氣角進行速度反饋控制. 相比電流, 速度的變化要慢的多, 所以本次評估實驗設(shè)定電流環(huán)的控制頻率與PWM頻率是一致的, 速度環(huán)控制周期是電流環(huán)控制周期的兩倍, 這樣可以保證檢測到較高精度的速度[9].
若要在ARM平臺上實現(xiàn)矢量控制模型, 除了需要具備必要的硬件模塊以外, 還必須能在要求的時間范圍內(nèi)實現(xiàn)控制模型的軟件計算部分.
2 硬件平臺分析
通過上一節(jié)矢量控制模型的分析, 需要選擇合適的硬件平臺才能滿足要求. 硬件平臺需要對電流進行采樣、產(chǎn)生PWM輸出、對電機速度位置監(jiān)測、有供外部進行通信和調(diào)試的接口、有存儲器進行程序存儲, 還需要較高的運算速度完成軟件部分的計算和時鐘頻率滿足實時控制等. 基于此, 本次實驗以沈陽計算所高精數(shù)控研發(fā)的GTS100-AOA伺服驅(qū)動器為硬件平臺, 該硬件平臺以STM32F405ZG作為矢量控制核心芯片. 硬件系統(tǒng)主要組成如圖2所示.
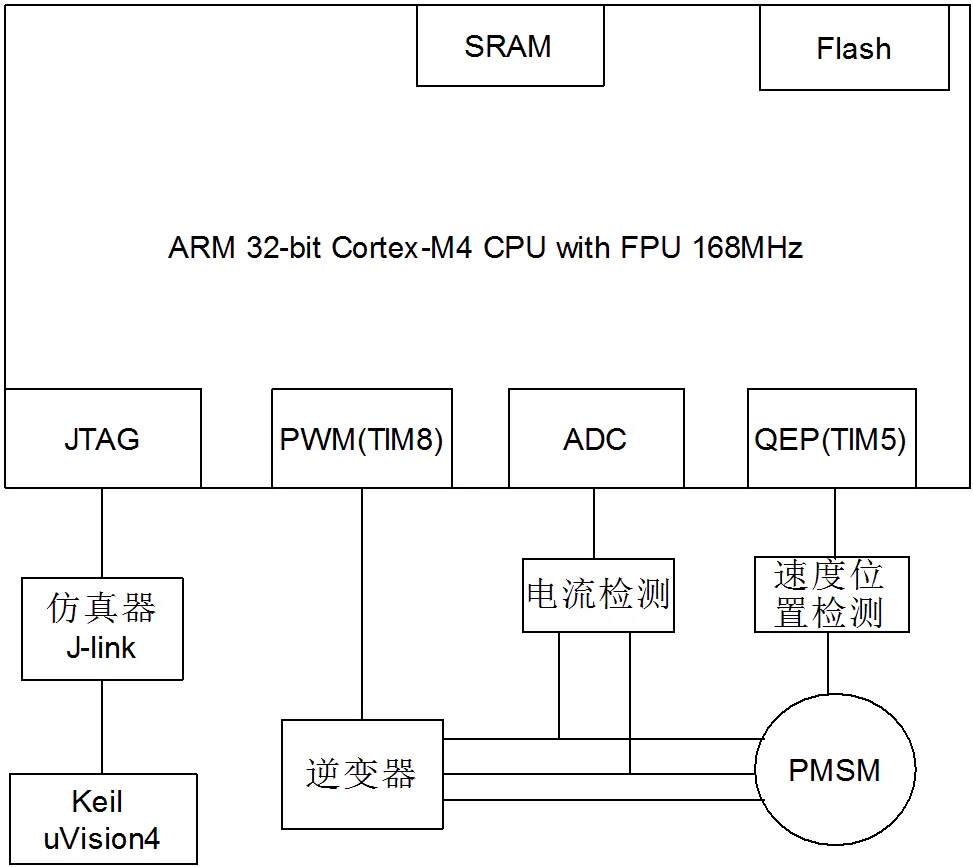
圖2 控制系統(tǒng)硬件總體結(jié)構(gòu)
STM32F405ZG是基于 Cortex-M4內(nèi)核由ARM專門開發(fā)的最新嵌入式ARM處理器, 在M3的基礎(chǔ)上強化了運算能力, 并且新加了浮點、DSP、并行計算等. 處理器內(nèi)核是高性能32位、低延遲3階管道, 可達1.25DMIPS/MHz, 最高時鐘頻率高達168MHz.
該處理器總線結(jié)構(gòu)是由32位多層AHB總線矩陣構(gòu)成, 在多個高速外設(shè)同時運行期間, 系統(tǒng)可以實現(xiàn)并發(fā)訪問和高效運行. 含有192KB系統(tǒng)SRAM, 系統(tǒng)SRAM可按字節(jié)、半字(16位)或全字(32位)訪問, 讀寫操作以CPU速度執(zhí)行, 等待周期為0. 此外還有高達1MB的嵌入式FLASH存儲器, 可用于開發(fā)和再編程. 此硬件平臺的存儲方式和總線結(jié)構(gòu)縮短了矢量控制計算時的額外開銷, 能夠及時處理輸入輸出數(shù)據(jù), 滿足矢量控制的實時性要求.
該硬件平臺還提供了矢量控制模型需要的外設(shè)接口:
1) TIM5外設(shè). STM32F405ZG器件中TIM5通用定時器是一個可編程定時器, 它提供的編碼器接口模式可用于讀取電機轉(zhuǎn)動時的位置信號并進行統(tǒng)計, 計算出電機轉(zhuǎn)動時的電氣角和機械角, 作為矢量控制算法中坐標變換和速度計算模塊的輸入.
2) ADC外設(shè). STM32F405ZG器件中ADC有12位, 是逐次趨近型模數(shù)轉(zhuǎn)換器. 它具有多達19個復(fù)用通道, 可測量來自16個外部源、兩個內(nèi)部源的信號. 這些通道的A/D轉(zhuǎn)換可在單次、連續(xù)、掃描或不連續(xù)采樣模式下進行. 該外設(shè)支持DMA, 減少了CPU訪問該外設(shè)的開銷. 可用于對電機電流進行監(jiān)測和采樣, 作為矢量控制坐標變換的輸入.
3) TIM8外設(shè). STM32F405ZG器件中TIM8高級控制定時器包含一個16位自動重載計數(shù)器, 有多個獨立通道可用于PWM生成(邊沿模式和中心對齊模式), 并且可以通過軟件設(shè)置PWM信號死區(qū)的大小. 利用TIM8用于矢量控制模型PWM的輸出.
4) JTAG調(diào)試接口. STM32F405ZG器件中的JTAG調(diào)試接口主要用于芯片內(nèi)部測試, 可以通過J-link連接JTAG進行程序燒寫和在線調(diào)試. 還可以通過JTAG在集成開發(fā)環(huán)境Keil uVision4讀取ARM平臺的CPU負載率進行分析.
3 軟件平臺分析
根據(jù)需要實現(xiàn)的控制模型以及所選取的硬件平臺, 還需要選擇合適的軟件平臺. 軟件平臺需要很好的支持硬件平臺, 能實現(xiàn)任務(wù)調(diào)度, 多線程之間切換, 模塊化的管理程序, 滿足矢量控制實時性要求等. 本次評估實驗選擇RTX實時操作系統(tǒng)作為軟件平臺. RTX是免稅版的確定性實時操作系統(tǒng), 它提供搶占式多線程服務(wù)、同時可以創(chuàng)建執(zhí)行多個功能的程序, 并有助于創(chuàng)建結(jié)構(gòu)更好且維護更加輕松的應(yīng)用程序, 適用于ARM和Cortex-M設(shè)備. 整個RTX Kernel組成如圖3.
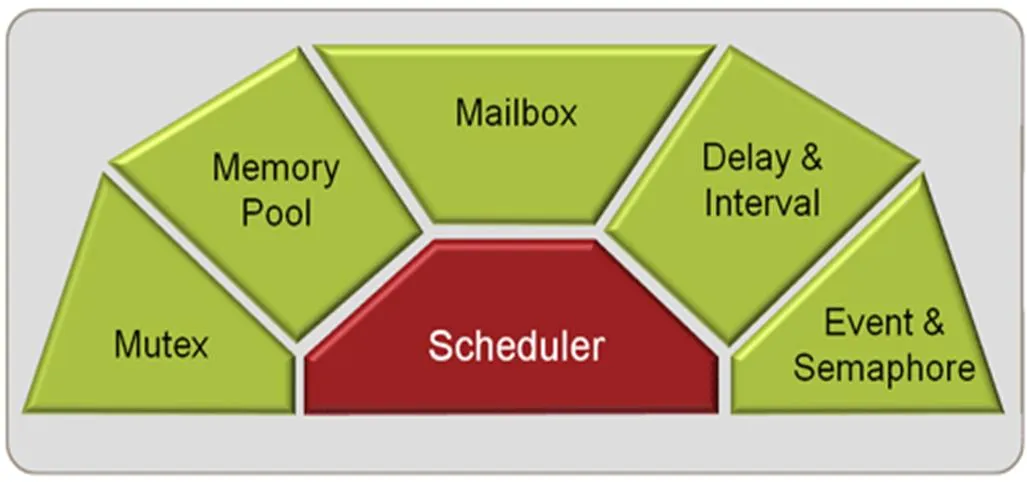
圖3 RTX Kernel組成
該軟件平臺還滿足矢量控制模型的軟件需求, 主要體現(xiàn)在:
1) RTX是專門為基于ARM和Cortex-M MCU的嵌入式系統(tǒng)而編寫的, 能非常好的支持上節(jié)介紹的硬件平臺.
2) RTX可以方便地管理模塊化的矢量控制程序, 根據(jù)不同的實驗需求完成模塊的增減, 滿足矢量控制程序可擴展的要求.
3) RTX運行速度快, 占用資源極少. 系統(tǒng)計時器精度最高可達0.001ns, 支持RTX線程最低可能的延遲調(diào)度, 可以非常好地滿足矢量控制的實時性要求.
除此以外, 相比其他的實時操作系統(tǒng), RTX學(xué)習(xí)周期短, 產(chǎn)品開發(fā)速度快. Vision IDE調(diào)試器完全支持 RTX, 其中采用RTX任務(wù)識別工具以便于在應(yīng)用程序中快速方便地配置和調(diào)試RTX. 沒有了復(fù)雜的配置過程, 開發(fā)者可集中精力在控制策略的實現(xiàn)上.
系統(tǒng)軟件運行的主要流程如下: PWM頻率設(shè)定為8K時, 矢量控制程序每過125us觸發(fā)一次線程中斷, ADC外設(shè)進行電流采集, 觸發(fā)DMA中斷, 然后根據(jù)不同的div分頻值運行電流環(huán)和速度環(huán). 電流環(huán)主要包括CLARKE變換、PARK變換、PI電流調(diào)節(jié)、IPARK變換、SVGEN等模塊, 速度環(huán)主要包括速度PI調(diào)節(jié)等模塊, 其中電流環(huán)執(zhí)行的頻次是速度環(huán)的兩倍.
4 性能評估
一般從時間復(fù)雜度和空間復(fù)雜度對算法的性能進行評估. 由于是在特定ARM平臺上實現(xiàn)矢量控制算法的, 可以認為硬件平臺的CPU負載率能間接反映算法的時間復(fù)雜度. 在不同的存儲器中, 讀寫操作的速度不同, 而代碼空間大小沒有發(fā)生變化, CPU負載率間接反映了算法復(fù)雜度. 綜上, 這里選擇CPU負載率作為ARM平臺矢量控制性能的評估指標.
4.1 CPU負載率計算方法
由于沒有現(xiàn)成的工具可以直接測量ARM平臺CPU負載率進行性能評估, 這里使用了一種通過建立空閑任務(wù)計算CPU負載率的辦法. 首先在用戶入口函數(shù)發(fā)起一個優(yōu)先級為最低的空閑任務(wù),該任務(wù)僅僅給一個靜態(tài)變量(count)加1, 由于該任務(wù)優(yōu)先級最低, 只有當(dāng)CPU不需要執(zhí)行其他任務(wù)時, 才會切換到空閑任務(wù). 在用戶函數(shù)中延遲2秒, 讓CPU 2秒鐘內(nèi)全部在執(zhí)行空閑任務(wù), 這時靜態(tài)變量(count)將會是一個很大的值, 將count/100保存到另一個靜態(tài)變量base中作為比較基礎(chǔ), count值重置為0. 然后發(fā)起一個優(yōu)先級比空閑任務(wù)高一級的統(tǒng)計任務(wù)用于計算CPU負載率, 每2秒執(zhí)行一次, 利用空閑任務(wù)中靜態(tài)變量(count)的值與base之比和100做差得出CPU負載率.
通過上述方法進行CPU負載率的測量. 實驗評估主要分成兩個部分, 第一部分是在內(nèi)部FLASH中運行程序, 分析不同PWM頻率下控制模塊對CPU的負載率; 第二部分是在不同的存儲器中(內(nèi)部RAM和內(nèi)部FLASH)運行程序, 評估不同PWM頻率下執(zhí)行矢量控制程序時CPU的負載率.
4.2 不同PWM頻率下控制模塊的CPU負載率
如圖4所示. 空載時表示不添加任何控制算法模塊, 但是會執(zhí)行線程調(diào)度程序和PWM中斷服務(wù)程序. 電流環(huán)PI含有電流PI調(diào)節(jié)模塊[10]. 速度環(huán)含有速度PI調(diào)節(jié)和速度計算模塊. 圖4中縱坐標表示CPU負載率, 橫坐標表示各模塊是向右累加的.
從圖4中可以看出, PWM頻率相同時, CPU負載率會隨著控制模塊的增加而增加, CPU負載率變化的幅度和添加模塊的處理復(fù)雜度相關(guān); PWM頻率不同時, 相同累加模塊的CPU負載率會隨著PWM頻率的增加而增加, 因為PWM頻率的增加會使得各模塊處理頻率次數(shù)增多.
空載時由于要執(zhí)行PWM中斷服務(wù)程序和線程調(diào)度程序, PWM頻率越高, PWM中斷服務(wù)調(diào)用次數(shù)越多, 使得空載時不同PWM頻率下CPU負載率不一致.
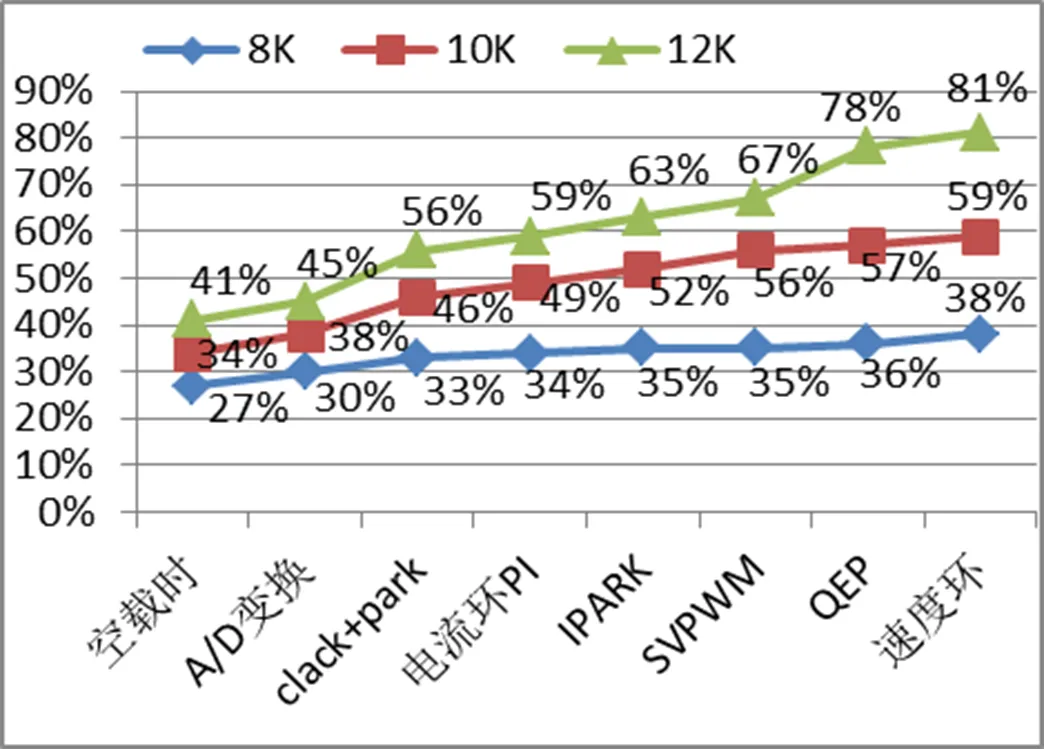
圖4 不同PWM頻率下控制模塊CPU的負載率
PWM頻率越高, 會使得控制系統(tǒng)的實時性越高, 逆變器開關(guān)變換得越頻繁. PWM頻率可根據(jù)電機功率來選擇, 但電流太大會影響逆變器開關(guān)的變換頻率, 所以載波頻率設(shè)定為8KHz比較合適. 從圖4可知, 在內(nèi)部FLASH中以不同PWM頻率運行矢量控制算法CPU負載率最高81%, 雖然使用上述方法測得的CPU負載率有一定誤差, 但在一定程度上說明了在PWM頻率低于13KHz的情況下ARM平臺適應(yīng)于不同頻率的電機, 并且具有較好的實時性和穩(wěn)定性.
4.3 不同存儲器中執(zhí)行矢量控制算法CPU負載率
STM32F405ZG有內(nèi)部RAM和內(nèi)部FLASH兩種存儲器, 可以通過自舉配置選擇不同存儲器作為自舉空間執(zhí)行矢量控制算法. 從圖5可以看出PWM頻率相同時, 矢量控制算法在內(nèi)部RAM中執(zhí)行的負載率小于在內(nèi)部FLASH中執(zhí)行的負載率. 這主要是由于內(nèi)部RAM讀寫以CPU速度進行, 且等待周期為0, 而內(nèi)部FLASH管理CPU通過AHB I-Code 和D-Code對FLASH進行訪問, 從而導(dǎo)致了負載率不同. 在PWM不同時, 對于相同存儲器中運行的程序, CPU負載率會隨著PWM頻率的增加而增加, 主要是因為PWM頻率增加導(dǎo)致矢量控制算法執(zhí)行的頻率增加從而增加了CPU負載率.
從圖5還可以看出, 當(dāng)PWM頻率為12KHz, 在FLASH中運行程序時CPU負載率為81%, 可以通過將程序放到RAM中運行來降低CPU負載率. 針對那些對實時性能要求非常高的小功率電機, 可以在內(nèi)部RAM中執(zhí)行基于矢量控制策略的實時控制系統(tǒng); 而對那些對實時性要求一般的大中功率電機可以在內(nèi)部FLASH中運行.
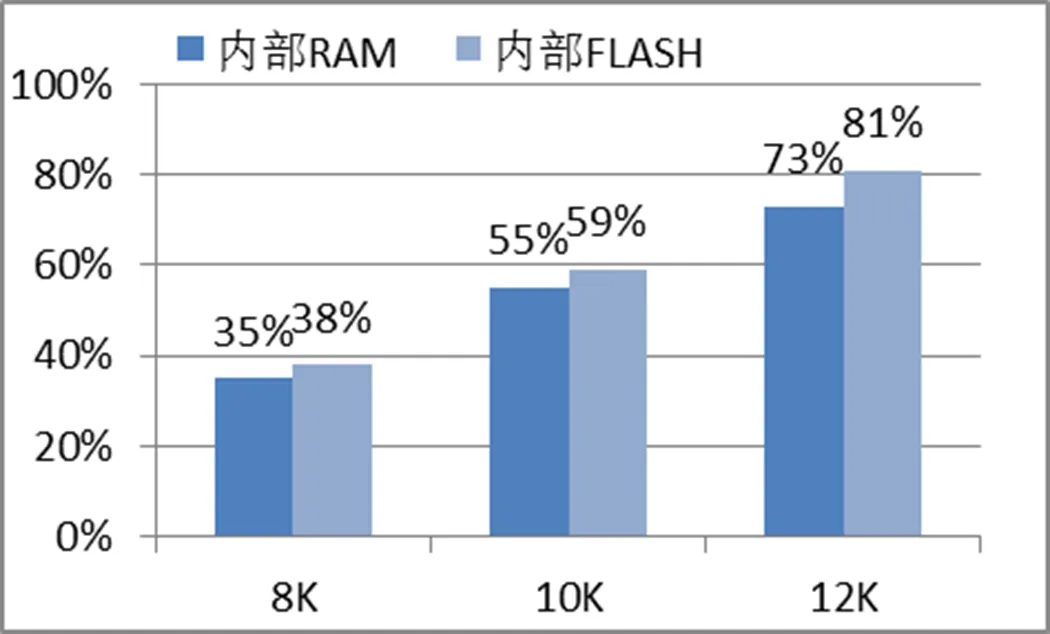
圖5 不同存儲器中執(zhí)行矢量控制算法CPU負載率
5 結(jié)語
不僅分析了ARM平臺實現(xiàn)矢量控制模型需要的軟硬件環(huán)境, 提出了一種測量CPU負載率的方法, 而且通過實驗得出了不同PWM頻率下矢量控制模塊的CPU負載率, 以及不同存儲器中執(zhí)行矢量控制算法的CPU負載率. 通過對實驗數(shù)據(jù)和矢量控制模型軟硬件環(huán)境分析, 對以后開發(fā)人員在特定功率伺服電機控制系統(tǒng)中對軟硬件平臺和矢量控制算法的選擇上有一定的指導(dǎo)意義, 彌補了當(dāng)前伺服控制系統(tǒng)對該評價工作的空白.
1 李靜,向風(fēng)紅.張勇,等.基于ARM核微控制器的異步電機矢量控制.電子與封裝,2007,7(1):43–45,48.
2 曲家騏.永磁同步伺服電動機的矢量控制.微特電機,2001, (4):18–21.
3 張斌斌,殳國華,丁君武.基于ARM的交流異步電機控制與饋電系統(tǒng)設(shè)計.電氣自動化,2015,37(5):1–3,9.
4 張巍,陳今潤,王琛.基于ARM的PMSM控制系統(tǒng)設(shè)計.微計算機信息(嵌入式SOC),2010,26(11-2):70–71.
5 韋克康,周明磊,鄭瓊林,王琛琛.基于復(fù)矢量的異步電機電流環(huán)數(shù)字控制.電工技術(shù)學(xué)報,2011,26(6):88–94.
6 李培偉.永磁同步電機伺服系統(tǒng)矢量控制技術(shù)研究[碩士學(xué)位論文].南京:南京理工大學(xué),2013.
7 肖衛(wèi)文,熊芝耀,李世春,程緒長.基于變參數(shù)PI的永磁同步電動機矢量控制系統(tǒng).電力電子技術(shù),2009,43(4):32–33.
8 郝龍.永磁同步電機無速度傳感器矢量控制[碩士學(xué)位論文].哈爾濱:哈爾濱工程大學(xué),2011.
9 湯新舟.永磁同步電機的矢量控制系統(tǒng)[碩士學(xué)位論文].杭州:浙江大學(xué),2005.
10 周暉.基于模糊PI控制的永磁同步電機矢量控制系統(tǒng)實現(xiàn)及性能研究[碩士學(xué)位論文].杭州:浙江大學(xué),2006.
Analysis and Performance Assessment of Vector Control for Motor Based on ARM
ZHANG Yu-Lei1,2, WANG Zhi-Cheng2,3, SHI Xiu-Yu1,2, ZHENG Guo-Li2,3
1(University of Chinese Academy of Sciences, Beijing 100049, China)2(National Engineering Research Center for High-end CNC, Shenyang Institute of Computing Technology, Chinese Academy of Sciences, Shenyang 110168, China)3(Shenyang Golding NC Intelligent Tech. Co. Ltd., Shenyang 110168, China)
This paper analyzes and evaluates the motor vector control model of ARM platform, and makes up the blank of the evaluation in current servo control system. The analysis of the vector control model for motor and the environment of software and hardware need to realize the model based on ARM, which lays in the foundation of the analysis of vector control for motor based on ARM and performance evaluation. We use one method by idle task computing CPU load, and use this method to compute CPU load for performance evaluation experiments. Applications of vector control strategies under different conditions are analyzed. It has a guiding significance for vector control strategies choose based on ARM.
vector control; ARM; CPU load; performance evaluation; RTX
國家科技重大專項(2013ZX04001-031)
2016-04-24;收到修改稿時間:2016-05-26
[10.15888/j.cnki.csa.005538]
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19