三體滑行艇槽道的水氣動(dòng)力特性研究
2017-02-17 09:23:07章麗麗孫寒冰蔣一宋儒鑫鄒勁
哈爾濱工程大學(xué)學(xué)報(bào) 2017年1期
關(guān)鍵詞:模型
章麗麗, 孫寒冰, 蔣一, 宋儒鑫, 鄒勁
(哈爾濱工程大學(xué) 船舶工程學(xué)院,黑龍江 哈爾濱 150001)
三體滑行艇槽道的水氣動(dòng)力特性研究
章麗麗, 孫寒冰, 蔣一, 宋儒鑫, 鄒勁
(哈爾濱工程大學(xué) 船舶工程學(xué)院,黑龍江 哈爾濱 150001)
為了研究槽道的水氣動(dòng)力作用機(jī)理,本文利用CFX軟件結(jié)合船體六自由度運(yùn)動(dòng)方程對(duì)三體滑行艇在Fr為3.14~5.83的兩自由度靜水直航運(yùn)動(dòng)進(jìn)行了模擬,結(jié)合試驗(yàn)中的船體興波特性分析了槽道水氣動(dòng)升力隨航速的變化規(guī)律。計(jì)算結(jié)果表明:槽道在Fr=5.83時(shí),進(jìn)入全通氣狀態(tài);在Fr>4.04時(shí),氣動(dòng)升力成為槽道升力的主要來(lái)源并主要作用于槽道末端的平直段。不同的平直段長(zhǎng)度的模型的計(jì)算結(jié)果表明:增大槽道平直段長(zhǎng)度能夠提升槽道升力,并取得了6.0%的平均阻力收益,但減少了槽道的縱傾力矩,不利于高航速下的縱向穩(wěn)定;而縮短平直段長(zhǎng)度則降低了槽道的升力,并導(dǎo)致阻力出現(xiàn)3.7%的平均增幅,但模型的縱向運(yùn)動(dòng)穩(wěn)定性略有提升。
三體滑行艇;槽道平直段;數(shù)值模擬;水氣動(dòng)力特性;阻力
三體滑行艇是近年來(lái)所發(fā)展起來(lái)的一種新型的滑行艇艇型,相比于常規(guī)單體滑行艇,三體滑行艇在構(gòu)型上的主要特征是起于船中的槽道分布于主艇體兩側(cè)。槽道在航行過(guò)程中不僅能夠提供水動(dòng)升力,當(dāng)航速足夠高時(shí),槽道與艇體興波脫離,還會(huì)提供氣動(dòng)升力來(lái)支持艇重,使得三體滑行艇具有遠(yuǎn)優(yōu)于常規(guī)滑行艇的高速阻力性能。相關(guān)研究表明,三體滑行艇的槽道所產(chǎn)生的氣動(dòng)升力能夠達(dá)到艇重的20%~30%[1];相比于具有單一槽道的雙體滑行艇,雖然雙體滑行艇在高速航行時(shí)所產(chǎn)生的氣動(dòng)升力可達(dá)到30~80%[2],但其槽道的氣動(dòng)壓力中心通常位于重心之前,導(dǎo)致航行中的縱向穩(wěn)定性變差;而三體滑行艇的氣動(dòng)壓力中心則靠近艇尾,所產(chǎn)生的縱傾力矩能有效抑制海豚運(yùn)動(dòng)的發(fā)生,因而具有良好的高速運(yùn)動(dòng)穩(wěn)定性。
目前,三體滑行艇已成為高性能類船舶的重要一支,有關(guān)其船體構(gòu)型及水動(dòng)力性能的研究也已成為滑行艇艇型研究中的熱點(diǎn)問(wèn)題。鄒勁等[3]采用模型試驗(yàn)手段對(duì)三體滑行艇在靜水和波浪中的水動(dòng)力特性進(jìn)行了系統(tǒng)的理論研究,對(duì)不同構(gòu)型的模型在系列工況下的航行特性進(jìn)行了分析[4],并嘗試了在槽道內(nèi)設(shè)置水翼、舭龍骨、噴氣裝置等設(shè)備來(lái)改善槽道的流動(dòng)特性[5]。孫寒冰等[6]則采用數(shù)值手段對(duì)三體滑行艇主體部分所設(shè)置的引氣槽結(jié)構(gòu)進(jìn)行了研究,討論了不同拱度的引氣槽對(duì)高速阻力性能的影響。Yousefi等[7]對(duì)現(xiàn)有的滑行艇水動(dòng)力研究手段進(jìn)行了總結(jié),并采用基于FVM(finite volume method)的Fluent軟件對(duì)某單體滑行艇以及其加裝槽道后的改進(jìn)模型進(jìn)行了對(duì)比研究。Morteza等[8]采用動(dòng)網(wǎng)格方法結(jié)合船體六自由度運(yùn)動(dòng)方程實(shí)現(xiàn)了多槽道滑行艇兩自由度靜水拖航的模擬[9],Moghadam等[10]則采用相同的手段研究了槽道的截面形式對(duì)靜水阻力性能的影響。
三體滑行艇槽道末段平直區(qū)域是槽道水氣動(dòng)力的主要作用區(qū),對(duì)于全艇的阻力性能有著至關(guān)重要的影響。因此,本文采用CFX軟件的FVM方法結(jié)合模型試驗(yàn)數(shù)據(jù)對(duì)該區(qū)域的高速流動(dòng)特性進(jìn)行了研究。
1 模型試驗(yàn)
1.1 模型簡(jiǎn)介
本文研究的三體滑行艇模型側(cè)視圖如圖1(a)所示,槽道起始于船中之前,其前段呈反“S”型,后段則采用與基線平行的平直型,平直段LT的長(zhǎng)度為0.2倍的船長(zhǎng)L。從圖1(b)可以看出,主艇體占據(jù)了全艇絕大部分的排水體積;兩側(cè)的片體極為細(xì)長(zhǎng),其主要作用在于為槽道提供遮蔽并維持船體運(yùn)動(dòng)的平衡;槽道則由主體和片體所共同圍成,為了與兩側(cè)壁面光滑過(guò)渡,在槽道頂?shù)膬啥司捎昧藞A角處理。表1中給出了以主艇體折角線寬BM進(jìn)行無(wú)因次化后的主要尺度參數(shù)。

(a)三體滑行艇模型側(cè)視示意圖
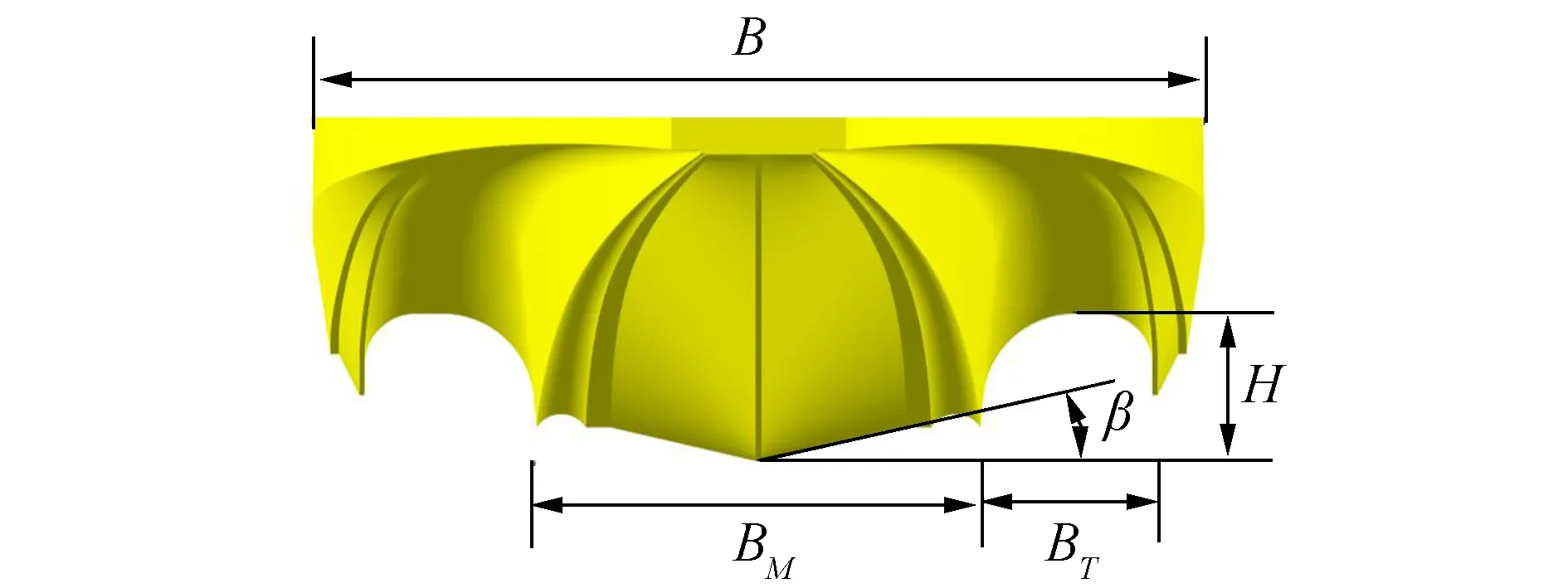
(b) 三體滑行艇模型正視示意圖圖1 三體滑行艇模型示意Fig.1 Specification of planning trimaran model
主要尺度參數(shù)總長(zhǎng)L/BM5.5總寬B/BM1.98槽道寬BT/BM0.38槽道高H/BM0.31槽道平直段長(zhǎng)度LS/BM1.1主體斜升角β/(°)13
1.2 試驗(yàn)結(jié)果分析
該三體滑行艇的模型試驗(yàn)于中航工業(yè)第605研究所高速水池完成,試驗(yàn)對(duì)容積弗勞德數(shù)Fr在3.14~5.83的工況進(jìn)行了測(cè)試,圖2給出了試驗(yàn)中的阻力、縱傾及升沉隨Fr的變化曲線,其中試驗(yàn)阻力由阻升比R/Δ表示,而無(wú)因次化升沉和縱傾表示為
(1)
(2)


(a)試驗(yàn)阻力隨Fr的變化曲線

(b) 試驗(yàn)縱傾和升沉隨Fr的變化曲線圖2 無(wú)因次化試驗(yàn)阻力、縱傾和升沉Fig.2 Dimensionless resistance, trim angle and sinkage
圖3給了Fr=1.79,2.24,3.14和5.83時(shí),艇體首尾的興波特性,結(jié)合試驗(yàn)數(shù)據(jù)及現(xiàn)象可以看出,在Fr為1.0~2.0,模型處于半滑行狀態(tài),逐漸增大的水動(dòng)升力首先將艇艏部抬起,導(dǎo)致在此航速段出現(xiàn)明顯的縱傾峰值并產(chǎn)生較大的興波;加之艇體浸深較大,槽道幾乎全部浸沒(méi)于水中,其半封閉的幾何特征在額外增加了全艇浸濕面積的同時(shí)產(chǎn)生了較大的形狀阻力,因此在此航速段存在一個(gè)明顯的低速峰值。
當(dāng)Fr高于2.0后,隨著航速的增加,艇體繼續(xù)抬升,縱傾迅速減少,水動(dòng)升力的進(jìn)一步增大,艏部及艇體兩側(cè)興波有了明顯的削弱;艇艉的尾渦進(jìn)一步向艇后延伸,使得尾封板完全暴露于空氣之中;此時(shí)可認(rèn)為模型已進(jìn)入滑行狀態(tài),槽道前段壁面已開始與興波波面脫離。
隨著航速持續(xù)提升,艇體升沉的變化趨于緩和,而縱傾的仍有進(jìn)一步減少的趨勢(shì),在Fr=3.14時(shí),槽道前段已完全脫離水面,部分主體興波被槽道吸收,并與槽道內(nèi)的空氣混合后在槽道尾端噴出,在艇尾形成明顯的槽道尾流。當(dāng)達(dá)到最高航速時(shí)(Fr=5.83),艇體兩側(cè)已幾乎沒(méi)有可見(jiàn)興波,主艇體興波基本上全部被槽道所吸收;而在尾封板處槽道頂部與槽道內(nèi)的水氣混合流脫離,使得槽道進(jìn)入充分的通氣狀態(tài);在此狀態(tài)下,槽道的升力主要由其內(nèi)部空氣層的氣動(dòng)力所提供,槽道內(nèi)浸濕面積大幅減少,從而降低了航行阻力,在阻力曲線則表現(xiàn)為高速段阻力隨著航速的增加而減小,出現(xiàn)第二個(gè)阻力峰。

(a)Fr=1.79

(b)Fr=2.24
(c)Fr=3.14

(d)Fr=5.83圖3 不同航速下艇體首尾的興波特性Fig.3 Bow and stern wave characteristics at different speeds
根據(jù)以上分析可以看出,三體滑行艇的阻力優(yōu)勢(shì)主要體現(xiàn)在阻力曲線相對(duì)平坦的高速段,其在低速段較大的阻力峰值會(huì)導(dǎo)致低速巡航時(shí)的功耗增大,故三體滑行艇正常工作航速應(yīng)處于起滑之后的高航速下,相應(yīng)地本文中數(shù)值研究也主要針對(duì)于此航速段的工況。
2 數(shù)值模型及有效性驗(yàn)證
2.1 數(shù)值計(jì)算方法簡(jiǎn)介
在如上試驗(yàn)研究基礎(chǔ)上,本文對(duì)3.14≤Fr≤5.83的工況進(jìn)行了模擬,由于在高速航行時(shí)航行姿態(tài)的變化會(huì)對(duì)艇體的水動(dòng)力特性產(chǎn)生較大的影響,在數(shù)值模擬的過(guò)程中計(jì)及了航行姿態(tài)的影響。圖4給出了具體的數(shù)值求解流程,本文采用RANS方程方法求解Navier-Stokes方程、結(jié)合SST(shear stress transportation)湍流模型和VOF(volume of fraction)方法完成了帶自由液面粘性繞流場(chǎng)求解體系的建立,通過(guò)初始模型繞流的求解,即可得出作用于艇體表面的壓力場(chǎng)和剪力場(chǎng),艇體所受外力F和力矩M則由以下兩式得出:
(3)
(4)
式中:τ、I和G分別表示剪切力、壓力和重力,n為船模表面的外法線向量,r和rG則分別為船殼表面任意一點(diǎn)以及重心處的位移矢量。而船體升沉X和和縱傾θ則由如下式所示的船體六自由度運(yùn)動(dòng)方程進(jìn)行求解:
(5)
(6)
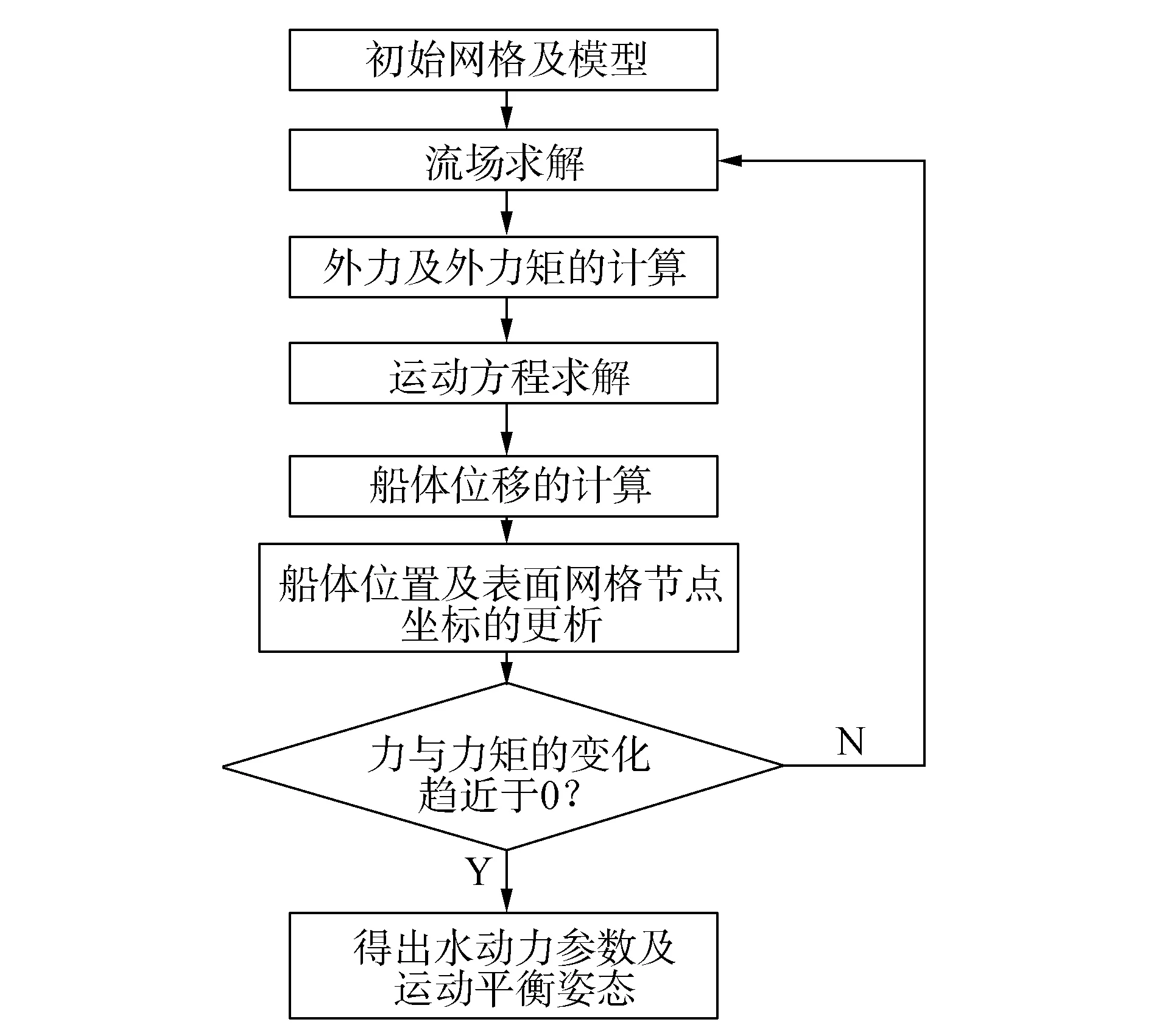
圖4 數(shù)值求解流程圖Fig.4 Computational process
進(jìn)而可得出船體表面網(wǎng)格節(jié)點(diǎn)的位移,通過(guò)網(wǎng)格節(jié)點(diǎn)的移動(dòng)即可實(shí)現(xiàn)船體運(yùn)動(dòng)的模擬。實(shí)際的求解過(guò)程可認(rèn)為是流場(chǎng)求解與運(yùn)動(dòng)求解的耦合,當(dāng)所受外力和力矩在一定的物理時(shí)間內(nèi)的變化趨近于零時(shí),可認(rèn)為整個(gè)求解過(guò)程達(dá)到了收斂,此時(shí)所求得的船體姿態(tài)即為該工況下穩(wěn)定航行時(shí)的平衡姿態(tài)。
2.2 計(jì)算域的建立及網(wǎng)格劃分
如圖5所示,考慮到模型及流動(dòng)的對(duì)稱性,本文中計(jì)算域的建立只針對(duì)半側(cè)船體進(jìn)行,其在艇前、艇后、甲板以上、艇體以下、艇體左側(cè)方向的尺度分別為1L、4L、0.8L、1.5L和1.5L。為了對(duì)三體滑行艇的復(fù)雜幾何外形進(jìn)行捕捉,本文中采用結(jié)構(gòu)與非結(jié)構(gòu)的混合網(wǎng)格進(jìn)行整個(gè)計(jì)算域的離散。其中,在艇體表面采用三角形面網(wǎng)格進(jìn)行劃分,并由表面網(wǎng)格沿法線方向進(jìn)行拉伸形成近場(chǎng)的邊界層網(wǎng)格,在遠(yuǎn)場(chǎng)區(qū)域采用規(guī)則的結(jié)構(gòu)化網(wǎng)格,在近遠(yuǎn)場(chǎng)的過(guò)渡區(qū)則采用非結(jié)構(gòu)的四面體網(wǎng)格進(jìn)行過(guò)渡,總網(wǎng)格數(shù)量約為8.4×105,艇體表面y+的范圍為70~300。
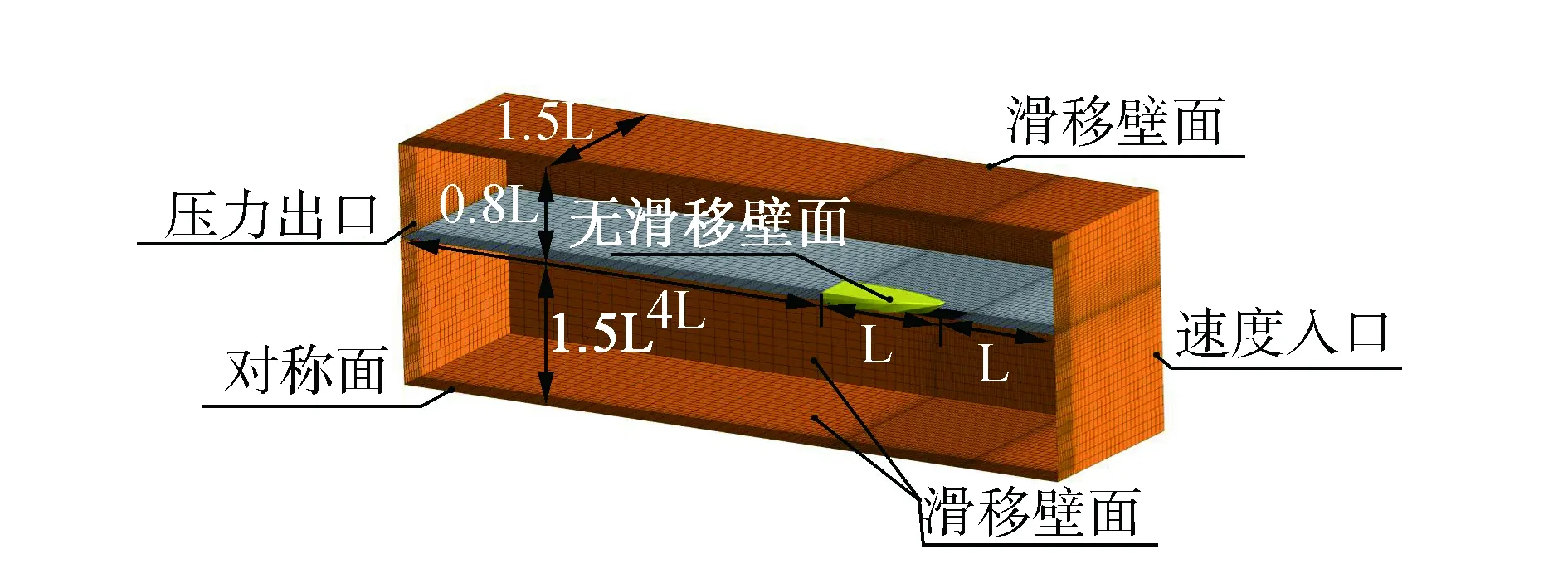
圖5 計(jì)算域及網(wǎng)格劃分示意Fig.5 Computational domain and mesh generation
2.3 數(shù)值有效性的驗(yàn)證
表2中給出了計(jì)算值與試驗(yàn)值的對(duì)比,可以看出,在計(jì)算的速度范圍內(nèi),計(jì)算姿態(tài)與試驗(yàn)值吻合度良好;而阻力計(jì)算值則在Fr>4.49的高航速下出現(xiàn)較大的誤差,但整體趨勢(shì)與試驗(yàn)值一致,并且對(duì)高航速下的阻力峰值點(diǎn)也有較為準(zhǔn)確的捕捉。因此,本文中的計(jì)算方法能夠較好的模擬出三體滑行艇在靜水直航中的水動(dòng)力特性,同時(shí)亦具有一定的計(jì)算精度,可用于本文中的計(jì)算與分析。

表2 計(jì)算值與試驗(yàn)值的對(duì)比Table 2 Comparison of calculated results and experimental data
3 槽道作用機(jī)理研究
在試驗(yàn)過(guò)程中,由于模型的遮蔽,所觀測(cè)到的現(xiàn)象主要為船體兩側(cè)興波和尾流,為了能夠直觀的描述槽道內(nèi)的流動(dòng)特征,在計(jì)算結(jié)果的處理中利用0≤X/L≤0.32槽道各剖面處的水氣分布云圖表示了槽道內(nèi)興波和空氣層的隨航速的變化,如圖6所示,在Fr=3.14時(shí),模型處于滑行狀態(tài)的初始階段,由于航行吃水較大,主片體興波導(dǎo)致槽道的中后段浸沒(méi)于水中,僅有極少量的空氣分布于槽道兩側(cè)的壁面處;隨著航速的提高,更多的艇體被抬離出水面,使得槽道內(nèi)興波被削弱,槽道壁面逐漸與興波波面脫離,相應(yīng)地通氣量也逐漸增大;直至最高航速時(shí),槽道與水面完全脫離,并形成完整的氣層覆蓋于興波波面之上;此時(shí)槽道內(nèi)的升力也由水動(dòng)升力轉(zhuǎn)化為氣層的氣動(dòng)升力。
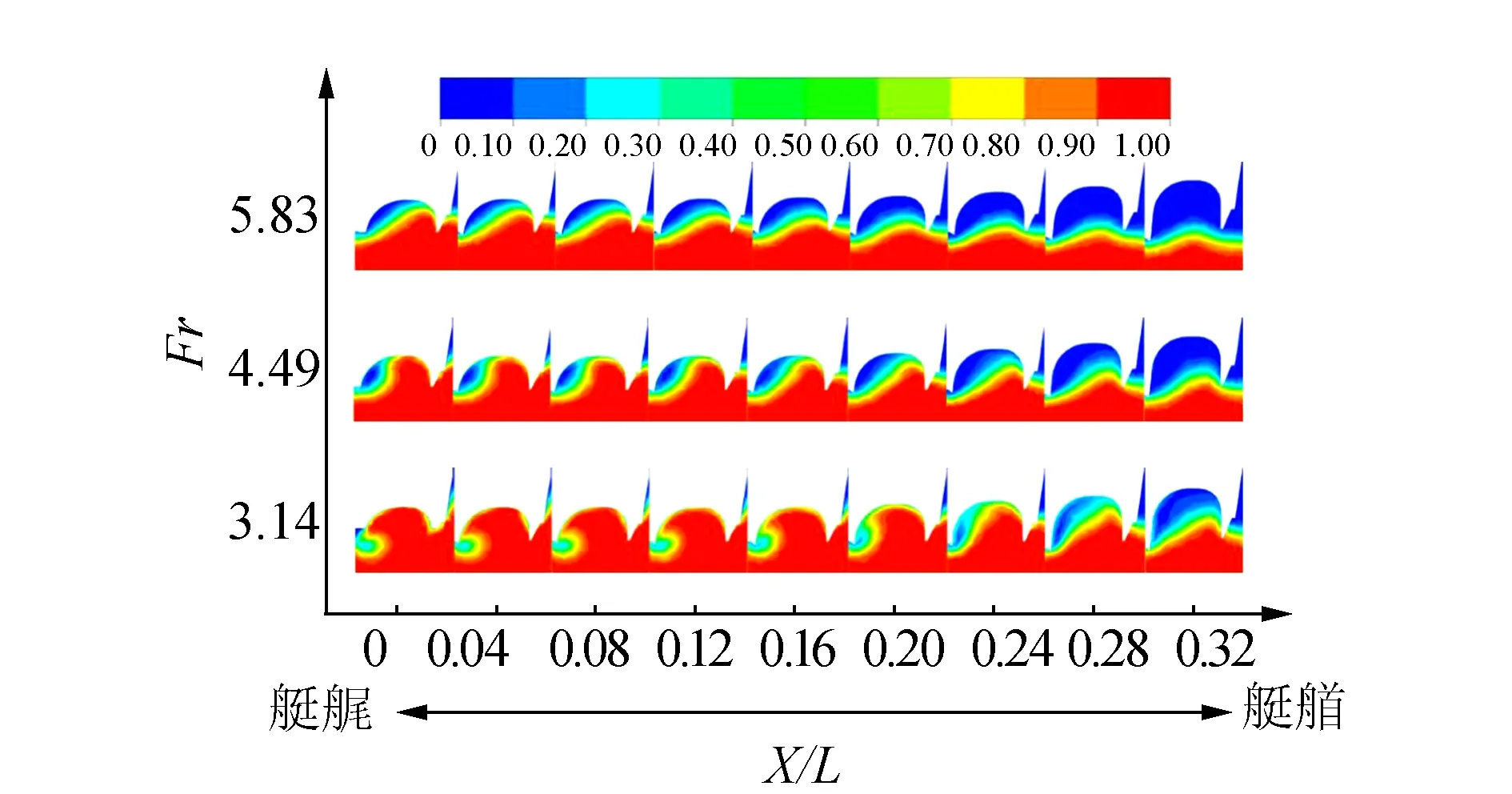
圖6 不同航速下槽道系列剖面處的興波波形Fig.6 A series of transverse wave cuts in tunnel region at different speeds
為了研究槽道內(nèi)的升力在槽道內(nèi)的分布情況,文中將0≤X/L≤0.4的槽道壁面沿縱向分為10段,并對(duì)每段壁面所提供的升力進(jìn)行了監(jiān)測(cè),得出了槽道升力沿縱向的變化曲線,如圖7所示。結(jié)合槽道內(nèi)的流動(dòng)特性可以看出,主片體興波對(duì)槽道升力有直接的影響,在Fr<4.04時(shí),隨著興波的減弱槽道升力的峰值也隨之降低,并且隨著槽道浸濕長(zhǎng)度的減少,其峰值也向艇尾移動(dòng),這表示在此航速段水動(dòng)升力仍是槽道升力的主要來(lái)源;當(dāng)Fr>4.04時(shí),雖然空氣層的增長(zhǎng)導(dǎo)致槽道浸濕面積的減少,但由于氣動(dòng)力逐漸增大并提供大多數(shù)的槽道升力,故槽道內(nèi)升力分布的變化不再明顯。

圖7 槽道升力沿縱向的變化曲線Fig.7 Tunnel lift varying along longitudinal direction
4 不同槽道平直段長(zhǎng)度模型水氣動(dòng)力性能對(duì)比
從圖7中槽道升力的作用區(qū)域來(lái)看,在高航速下的氣動(dòng)升力主要作用于0~0.2的槽道平直段,故在槽道構(gòu)型的設(shè)計(jì)中,平直區(qū)域的確定對(duì)槽道的高速水氣動(dòng)力性能有著至關(guān)重要的影響。因此,本文在試驗(yàn)?zāi)P偷幕A(chǔ)上將槽道平直段長(zhǎng)度分別調(diào)整為0.15L和0.25L,并利用上述數(shù)值手段對(duì)3種槽道進(jìn)行了對(duì)比研究。圖8中給出了3種槽道中縱剖面形式的對(duì)比,為了便于文中的討論,將試驗(yàn)?zāi)P兔麨镸1,槽道平直段縮短和增長(zhǎng)后的模型則分別命名為M2和M3。
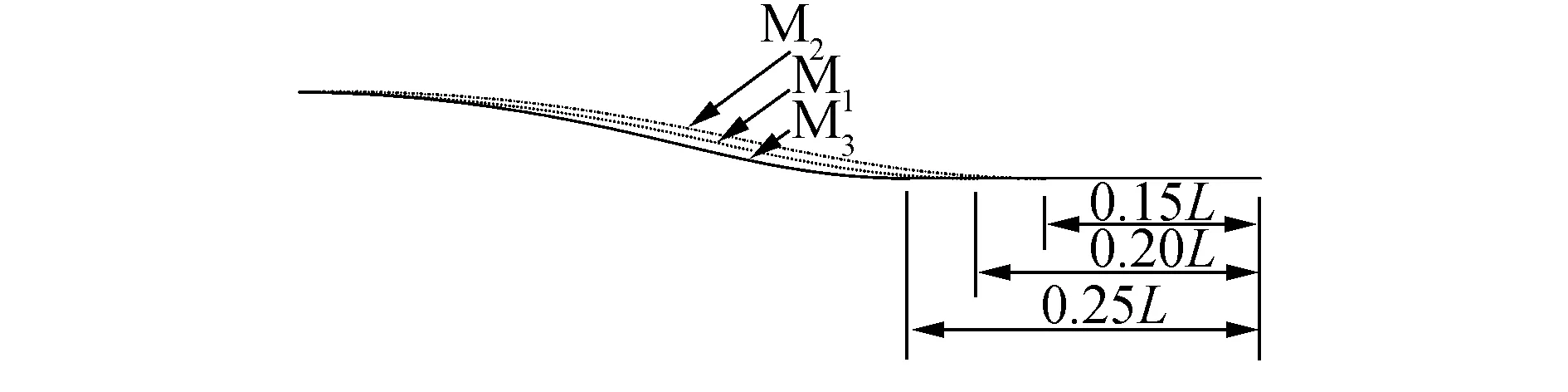
圖8 不同槽道中縱剖面形式的對(duì)比Fig.8 Comparison of longitudinal central section of different tunnels
圖9中給出了三模型計(jì)算阻力和姿態(tài)的對(duì)比,可以看出,平直段的長(zhǎng)度對(duì)模型阻力有著明顯的影響,相比于原始模型M1,M2的阻力在計(jì)算的速度范圍內(nèi)有了不同程度的增大,其平均阻力增幅為3.7%。而M3的阻力則有所降低,并且隨著航速的增大,阻力減額也愈發(fā)明顯;在Fr=5.83時(shí),其最大阻力收益為7.6%,各航速下的平均阻力收益則為6.0%。在航行姿態(tài)上,數(shù)值計(jì)算結(jié)果較好的體現(xiàn)出了不同模型之間的差異性,其中M2的航行縱傾和升沉較M1均有所降低,而M3則表現(xiàn)出相反的趨勢(shì)。
由于槽道在航行過(guò)程中的主要作用是提供水氣動(dòng)升力,并維持船體的平衡,其所產(chǎn)生的動(dòng)升力的大小是衡量槽道水氣動(dòng)力性能的重要指標(biāo)。圖10中給出不同構(gòu)型的槽道所產(chǎn)生的升力L的比較,可以看出,平直段長(zhǎng)度的改變對(duì)槽道的水氣動(dòng)力性能產(chǎn)生了明顯的影響,其中,M3的槽道升力要明顯高于其余模型,較之M1,其槽道升力在各航速下的平均增幅為9.5%;而M2在不同航速下的槽道升力則較M1要小,其平均減額為7.4%。

(a)計(jì)算阻力

(b)計(jì)算縱傾及升沉圖9 不同模型計(jì)算阻力及航行姿態(tài)的對(duì)比Fig.9 Comparison of calculated resistance and hull behaviors

圖10 不同構(gòu)型槽道所產(chǎn)生的升力Fig.10 Comparison of tunnel lift between different tunnel configurations
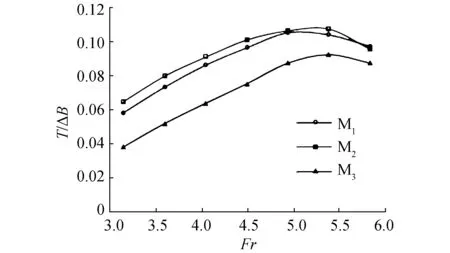
圖11 不同構(gòu)型槽道所提供的縱傾力矩Fig.11 Comparison of tunnel trim moment between different tunnel configurations
此外,由于槽道位于艇體的中后部,在航行過(guò)程中槽道升力能夠產(chǎn)生一個(gè)抑制航行傾角增大的縱傾力矩,其作用類似于尾壓浪板[11],能夠有效地減緩高航速下海豚運(yùn)動(dòng)的發(fā)生,提高艇體縱向運(yùn)動(dòng)的穩(wěn)定性。圖11給出了不同構(gòu)型的槽道所產(chǎn)生的縱傾力矩T的對(duì)比,可以看出,雖然M3的槽道提供了最多的升力,但其所產(chǎn)生的縱傾力矩較其余模型明顯要小,這對(duì)高航速下的運(yùn)動(dòng)穩(wěn)定性來(lái)說(shuō)是不利的;與之相反的是,M2的槽道所產(chǎn)生的縱傾力矩則較原始模型略大。造成這種現(xiàn)象的原因是平直段長(zhǎng)度的變化導(dǎo)致槽道壓力中心的縱向位置(LCP)發(fā)生改變,如圖12所示。M3槽道的壓力中心相比與原始模型要明顯前移,其在各航速下的平均移動(dòng)距離為0.036L;而M2槽道的壓力中心則向艇尾方向移動(dòng)了0.017L的平均距離。兩相比較,其結(jié)果是M3槽道的縱傾力臂減小,而M2槽道的縱傾力臂增大;對(duì)應(yīng)地,槽道的縱傾力矩也表現(xiàn)出了相同的變化趨勢(shì)。

圖12 不同構(gòu)型的槽道壓力中心的縱向位置Fig.12 Comparison of LCP between different tunnel configurations
5 結(jié)論
本文結(jié)合試驗(yàn)現(xiàn)象和數(shù)值計(jì)算結(jié)果對(duì)槽道的水氣動(dòng)力作用機(jī)理進(jìn)行了研究,討論了槽道平直段長(zhǎng)度對(duì)三體滑行艇阻力性能以及槽道水氣動(dòng)力特性的影響,計(jì)算結(jié)果具有較好的可信度,在三體滑行艇艇型設(shè)計(jì)中具有一定的參考價(jià)值。根據(jù)本文中的計(jì)算和分析,可得出以下結(jié)論:
1)三體滑行艇的阻力優(yōu)勢(shì)主要體現(xiàn)在起滑之后的高速段,在此航速段,主艇體興波逐漸被槽道所吸,槽道內(nèi)通氣量逐漸增大,并在Fr=5.83時(shí)與興波波面脫離,進(jìn)入全通氣狀態(tài)。
2)槽道進(jìn)入全通氣狀態(tài)后,其浸濕面積迅速減少,降低了此狀態(tài)下的總阻力,使得高速段阻力曲線出現(xiàn)了明顯的阻力峰。
3)高航速下的氣動(dòng)升力主要作用于槽道的平直段。而將平直段長(zhǎng)度增大,有利于提高槽道升力,并降低整體的航行阻力,但會(huì)導(dǎo)致槽道縱傾力矩的減小,不利于高航速下的運(yùn)動(dòng)穩(wěn)定。而將平直段長(zhǎng)度縮短則取得了相反的變化趨勢(shì)。
4)槽道升力的大小與三體滑行艇的阻力性能有著直接的相關(guān)性,在本文的計(jì)算模型中,槽道升力較大的模型,其阻力性能也更好。
[1]JIANG Yi, SUN Hanbing, ZOU Jin, et al. Analysis of tunnel hydrodynamic characteristics for planing trimaran by model tests and numerical simulations[J]. Ocean engineering, 2016, 113: 101-110.
[2]COLLU M, WILLIAMS A W G, PATEL M H, et al. Aerodynamically alleviated marine vehicles (AAMV): development of a mathematical framework to design high speed marine vehicles with aerodynamic surfaces[C]//Proceedings of the 9th Internationnal Conference on High performance Marine Vessels. Shanghai, China, 2009.
[3]孫華偉, 鄒勁, 黃德波, 等. 三體滑行艇阻力試驗(yàn)研究[J]. 哈爾濱工程大學(xué)學(xué)報(bào), 2011, 32(7): 858-861. SUN Huawei, ZOU Jin, HUANG Debo, et al. Experimental study on a high-speed trimaran-planing boat[J]. Journal of Harbin engineering university, 2011, 32(7): 858-861.
[4]孫華偉, 黃德波, 鄒勁, 等. 斷階3體滑行艇阻力試驗(yàn)研究[J]. 華中科技大學(xué)學(xué)報(bào): 自然科學(xué)版, 2012, 40(1): 86-89. SUN Huawei, HUANG Debo, ZOU Jin, et al. Experimental investigation on resistances from stepped trimaran-planing boats[J]. Journal of Huazhong university of science and technology: natural science edition, 2012, 40(1): 86-89.
[5]MA Weijia, SUN Hanbing, ZOU Jin, et al. Test research on the resistance performance of high-speed trimaran planing hull[J]. Polish maritime research, 2013, 20(4): 45-51.
[6]蔣一, 孫寒冰, 鄒勁, 等. 引氣槽減阻特性的數(shù)值研究[J]. 哈爾濱工程大學(xué)學(xué)報(bào), 2016, 37(2): 151-156. JIANG Yi, SUN Hanbing, ZOU Jin, et al. Numerical research on drag reduction characteristics of air ducts[J]. Journal of Harbin engineering university, 2016, 37(2): 151-156.
[7]YOUSEFI R, SHAFAGHAT R, SHAKERI M. Hydrodynamic analysis techniques for high-speed planing hulls[J]. Applied ocean research, 2013, 42: 105-113.
[8]YOUSEFI R, SHAFAGHAT R, SHAKERI M. High-speed planing hull drag reduction using tunnels[J]. Ocean engineering, 2014, 84: 54-60.
[9]GHASSABZADEH M, GHASSEMI H. Determining of the hydrodynamic forces on the multi-hull tunnel vessel in steady motion[J]. Journal of the Brazilian society of mechanical sciences and engineering, 2014, 36(4): 697-708.
[10]MOGHADAM H K, SHAFAGHAT R, YOUSEFI R. Numerical investigation of the tunnel aperture on drag reduction in a high-speed tunneled planing hull[J]. Journal of the Brazilian society of mechanical sciences and engineering, 2015, 37(6): 1719-1730.
[11]CELANO T. The prediction of porpoising inception for modern planing craft[J]. SNAME transactions, 1998, 106: 269-292.
Investigation of hydrodynamic and aerodynamic characteristics of tunnel of planing trimaran
ZHANG Lili, SUN Hanbing, JIANG Yi, SONG Ruxin, ZOU Jin
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
In order to study the hydrodynamic and aerodynamic mechanisms of the tunnel of a planning trimaran, we used the computational fluid dynamics (CFD) software CFX to simulate the 2-DOF forward motion of the planing trimaran in calm water at volume-based Froude numbersFrranging from 3.14 to 5.83. We used the wave generating characteristics of both the model tests and numerical simulations to analyze the hydrodynamic and aerodynamic tunnel lift changes with navigation speed. Our calculated results show that the tunnel is entirely ventilated at a Froude number of 5.83, and that the aerodynamic force, which mainly acts on the straight section of the tunnel, provides most of the tunnel lift when the Froude number is above 4.04. The calculated results for models with different straight section lengths show that lengthening the straight section may increase tunnel lift to achieve an average drag reduction of 6.0%. However, this also decreases the tunnel trim moment and thus negatively affects the high speed motion stability. Shortening the straight section decreases the tunnel lift and results in an average drag increase of 3.7%, while slightly improving the longitudinal stability.
planing trimaran; straight section of tunnel; numerical simulation; hydrodynamic and aerodynamic characteristics; dra
2016-04-25
時(shí)間:2016-12-21.
國(guó)家自然科學(xué)基金 (51509055); 中國(guó)博士后科學(xué)基金項(xiàng)目(2015M571397).
章麗麗(1984-), 女,博士研究生; 孫寒冰(1985-), 女,講師.
孫寒冰,E-mail:sun-han-bing@163.com.
10.11990/jheu.201604071
U661.31
A
1006-7043(2017)01-0031-06
章麗麗, 孫寒冰, 蔣一, 等. 三體滑行艇槽道的水氣動(dòng)力特性研究[J]. 哈爾濱工程大學(xué)學(xué)報(bào), 2017, 38(1): 31-36. ZHANG Lili,SUN Hanbing,JIANG Yi,et al. Investigation of hydrodynamic and aerodynamic characteristics of tunnel of planing trimaran[J]. Journal of Harbin Engineering University, 2017, 38(1): 31-36.
網(wǎng)絡(luò)出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20161221.1524.010.html
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
