基于未知輸入觀測(cè)器的風(fēng)機(jī)變槳系統(tǒng)的魯棒故障診斷研究
2017-02-16 19:29:46王磊文傳博
科技與創(chuàng)新 2017年1期
關(guān)鍵詞:故障診斷
王磊++文傳博
摘 要:液壓變槳距系統(tǒng)是風(fēng)力發(fā)電機(jī)的重要組成部分,對(duì)確保風(fēng)力發(fā)電機(jī)的高效運(yùn)行發(fā)揮了十分重要的作用。液壓變槳距系統(tǒng)是風(fēng)電機(jī)組故障頻發(fā)的部分,對(duì)診斷風(fēng)機(jī)液壓變槳系統(tǒng)的故障十分必要。針對(duì)建模誤差、干擾和噪聲等對(duì)故障診斷準(zhǔn)確性的影響,利用未知輸入觀測(cè)器的方法,將模型不確定性、噪聲和未知輸入干擾等統(tǒng)一作為系統(tǒng)的未知輸入,設(shè)計(jì)魯棒殘差生成器,使未知輸入與液壓變槳系統(tǒng)發(fā)生的故障相解耦,實(shí)現(xiàn)對(duì)液壓變槳系統(tǒng)的故障診斷,最后通過仿真驗(yàn)證該方法的有效性和優(yōu)越性。
關(guān)鍵詞:液壓變槳距系統(tǒng);故障診斷;未知輸入觀測(cè)器;魯棒性
中圖分類號(hào):TK83 文獻(xiàn)標(biāo)識(shí)碼:A DOI:10.15913/j.cnki.kjycx.2017.01.028
隨著能源危機(jī)的加劇,發(fā)展低碳和環(huán)保的綠色能源迫在眉睫。風(fēng)力發(fā)電具有無污染、可再生等優(yōu)點(diǎn),全球都倡導(dǎo)要大力發(fā)展風(fēng)力發(fā)電技術(shù),風(fēng)力發(fā)電技術(shù)發(fā)展的勢(shì)頭迅猛。風(fēng)電場(chǎng)一般都位于偏遠(yuǎn)地區(qū),會(huì)受到各種惡劣天氣的影響。此外,由于不規(guī)則變化的風(fēng)速和風(fēng)向會(huì)對(duì)風(fēng)機(jī)產(chǎn)生沖擊載荷,所以,風(fēng)力發(fā)電機(jī)組故障發(fā)生的概率比較高。目前,在風(fēng)力發(fā)電系統(tǒng)中,大型風(fēng)電機(jī)組普遍采用液壓變槳距的運(yùn)行方式。一般情況下,液壓變槳系統(tǒng)在風(fēng)速變化幅度大、頻率高的情況下工作,很容易發(fā)生故障。風(fēng)力發(fā)電機(jī)變槳系統(tǒng)一旦發(fā)生故障,其維修將會(huì)十分困難,因此,對(duì)風(fēng)力發(fā)電機(jī)變槳系統(tǒng)進(jìn)行故障診斷具有十分重要的意義。
目前,基于數(shù)據(jù)的故障檢測(cè)方法在變槳距系統(tǒng)中已有許多研究工作,但是,利用基于模型的方法對(duì)風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)故障診斷方面的研究卻寥寥無幾。本文采用未知輸入觀測(cè)器的方法診斷風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)的故障。針對(duì)風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)中存在的未知輸入干擾、噪聲和模型不確定性問題,本文采用未知輸入觀測(cè)器的方法,設(shè)計(jì)風(fēng)力發(fā)電機(jī)液壓變槳機(jī)構(gòu)的魯棒殘差生成器,最后通過仿真驗(yàn)證該方法的有效性和優(yōu)越性。
1 未知輸入觀測(cè)器的基本原理
考慮一般動(dòng)態(tài)系統(tǒng)為:
式(1)中:x(t)為狀態(tài)向量,x(t)∈Rn;y(t)為輸出向量,y(t)∈Rm;u(t)為控制輸入向量,u(t)∈RP;d(t)為未知輸入向量,d(t)∈Rq;A,B,C,D為分別為相應(yīng)維度的系數(shù)陣;Ed為未知輸入矩陣;ξ和η為相互獨(dú)立的高斯白噪聲信號(hào)。
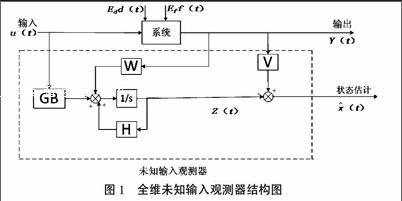
全維未知輸入觀測(cè)器的結(jié)構(gòu)如圖(1)所示,它的狀態(tài)空間表達(dá)式為:
為了達(dá)到未知輸入解耦的要求,矩陣H,G,W1,W2和矩陣V必須滿足以下4個(gè)約束條件:
可檢測(cè)性,即(C,A)可檢測(cè)時(shí)可以推出(C1,A)可檢測(cè),反之亦然。
引理2:假設(shè)(C1,A)可檢測(cè),其中,A1=A-Ed[(CEd)TCEd]-1(CEd)TCA,并且rank(Ed)=rank(CEd),那么,式(2)所描述的觀測(cè)器則為系統(tǒng)(1),即式(1)的一個(gè)未知輸入觀測(cè)器。
當(dāng)未知輸入到輸出的傳遞函數(shù)的極點(diǎn)穩(wěn)定時(shí),矩陣
列滿秩,且特征值均位于S域的左半平面上。
由此不難發(fā)現(xiàn),式(7)等價(jià)于矩陣 列滿秩,
且特征值均位于S域的左半平面上。
由上述分析過程可知,對(duì)矩陣W1的選擇并不是唯一,只要在可以保證系統(tǒng)狀態(tài)矩陣H是穩(wěn)定的前提下,就可以任意選擇W1,然后直接計(jì)算出其他矩陣。
2 魯棒殘差生成器的設(shè)計(jì)
2.1 風(fēng)機(jī)故障模型描述
考慮到故障、干擾、噪聲和模型不確定性對(duì)故障診斷準(zhǔn)確性的影響,針對(duì)液壓變槳系統(tǒng)故障診斷的風(fēng)機(jī)模型的狀態(tài)空間方程可描述為:
式(11)中:x=[y1 y2 y3 wr wg θ Tg]T,系統(tǒng)的狀態(tài)向量分別為3個(gè)液壓變槳機(jī)構(gòu)的液壓缸活塞位移、風(fēng)輪角速度wr、發(fā)電機(jī)轉(zhuǎn)動(dòng)角速度wg、傳動(dòng)系統(tǒng)扭轉(zhuǎn)角θ和發(fā)電機(jī)的實(shí)際扭矩Tg;輸出向量y=[y1 y2 y3 xv1 xv2 xv3]T,xv1,xv2,xv3分別是風(fēng)力發(fā)電機(jī)3個(gè)液壓變槳距執(zhí)行機(jī)構(gòu)的電液比例方向閥閥芯位移;輸入向量u=[i Tr Tgr]T;f為故障向量;d為未知輸入干擾向量;Ef,F(xiàn)f為已知故障矩陣;A,B,C,D,Ed為系統(tǒng)的系數(shù)矩陣;ξ為過程噪聲,η∶N(0,M);η為測(cè)量噪聲,η∶N(0,N);ξ和η為相互獨(dú)立的高斯白噪聲信號(hào)。
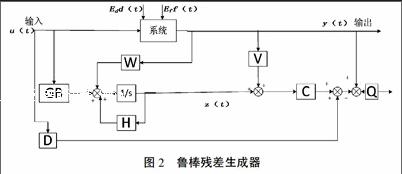
2.2 魯棒殘差生成器的設(shè)計(jì)
為了診斷風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)故障,利用未知輸入觀測(cè)器方法設(shè)計(jì)圖2所示的魯棒殘差生成器。
由之前未知輸入觀測(cè)器的介紹可知,選擇矩陣W1使得矩陣H具有穩(wěn)定的特征值對(duì)未知觀測(cè)器設(shè)計(jì)至關(guān)重要。
當(dāng)(C,A1)不可觀測(cè)時(shí),可以對(duì)系統(tǒng)(C,A1)進(jìn)行可觀性規(guī)范分解,進(jìn)而找到矩陣W1。下面,對(duì)(C,A1)進(jìn)行可觀性規(guī)范分解,即:
針對(duì)風(fēng)機(jī)液壓變槳系統(tǒng)故障診斷的未知輸入觀測(cè)器,具體算法步驟是:①計(jì)算rank(Ed)和rank(CEd),驗(yàn)證rank(Ed)=rank(CEd). 當(dāng)rank(Ed)≠rank(CEd)時(shí),未知輸入觀測(cè)器不存在。②根據(jù)式(6),V=Ed[(CEd)TCEd]-1(CEd)T和A1=GA,計(jì)算矩陣A1,G和V。③判斷系統(tǒng)(C,A)是否可觀測(cè),如果(C,A1)可觀測(cè),通過極點(diǎn)配置方法計(jì)算得到矩陣W1,然后執(zhí)行步驟⑦;如果(C,A1)不可觀測(cè),則執(zhí)行步驟④。④利用式(12)對(duì)(C,A1)進(jìn)行可觀性規(guī)范分解。⑤選取n1個(gè)期望特征值,對(duì)A11- 極點(diǎn)配置,選取相應(yīng)維度的加
權(quán)矩陣Q。⑥根據(jù)公式 計(jì)算W1. 其中,
為任意(n-n1)×m維矩陣。⑦根據(jù)公式H=A-WC和W=W1+HV計(jì)算矩陣H和W。
3 閾值設(shè)計(jì)
在變槳系統(tǒng)的殘差評(píng)估中,閾值的設(shè)定采用RMS值的方法。RMS值的方法是利用一段時(shí)間里殘差信號(hào)的RMS來檢測(cè)系統(tǒng)的故障,即:
式(16)中:r(t)為應(yīng)用于液壓變槳系統(tǒng)的風(fēng)機(jī)模型與它的故障模型對(duì)比產(chǎn)生的殘差。
閾值定義為:
當(dāng)JRMS>Jth,RMS時(shí),系統(tǒng)發(fā)生故障,報(bào)警;當(dāng)JRMS≤Jth,RMS時(shí),系統(tǒng)未發(fā)生故障,不報(bào)警。
4 仿真結(jié)果及分析
這里主要是檢測(cè)風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)的槳距角傳感器故障。
仿真中涉及的風(fēng)力發(fā)電機(jī)組主要數(shù)據(jù)為:風(fēng)力發(fā)電機(jī)的風(fēng)輪半徑為57.5 m,額定風(fēng)速為12 m/s,切出風(fēng)速為25 m/s,額定功率為4.8 MW,額定轉(zhuǎn)速為162 rad/s,空氣密度為 1.225 kg/m3,風(fēng)力機(jī)組轉(zhuǎn)動(dòng)慣量為5.5×107 kg·m2,齒輪比為1∶95,變槳速度為0°/s∶3°/s,槳葉槳距角變化范圍為0°∶90°。
高斯白噪聲ξ的方差M和高斯白噪聲η的方差N的大小設(shè)置為:
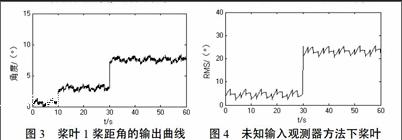
通過改變風(fēng)機(jī)槳葉1的槳距角傳感器的反饋系數(shù)和濾波時(shí)間常數(shù)值來模擬風(fēng)機(jī)槳葉1的槳距角傳感器故障。在輸入信號(hào)中加入高斯白噪聲,并且當(dāng)t=15 s時(shí),引入干擾信號(hào);當(dāng)t=30 s時(shí),對(duì)槳葉1的槳距角傳感器引入故障,分別對(duì)槳葉1槳距角的輸出、3個(gè)葉片槳距角殘差的RMS 、液壓缸活塞位移殘差的RMS和電液比例方向閥閥芯位移殘差的RMS進(jìn)行仿真分析,仿真結(jié)果如圖3、圖4、圖5、圖6、圖7所示。
由圖3可知,當(dāng)t=15 s時(shí),系統(tǒng)中存在一定幅度的干擾信號(hào),并且系統(tǒng)中的噪聲也會(huì)對(duì)系統(tǒng)輸出產(chǎn)生一定的影響。由圖4可知,槳葉1的槳距角殘差的RMS曲線在t=15 s時(shí)無明顯變化,并且去除了噪聲信號(hào)。
對(duì)比圖3、圖4可知,基于未知輸入觀測(cè)器的方法可以診斷槳距角傳感器故障,并且使殘差信號(hào)與噪聲、干擾等不確定因素解耦,具有良好的魯棒性。
由圖5、圖6、圖7可知,當(dāng)t=30 s時(shí),葉片1的槳距角殘差的RMS顯著增加,超過閾值,葉片2、葉片3的槳距角殘差的RMS、3個(gè)槳葉的電液比例方向閥閥芯位移殘差的RMS和3個(gè)槳葉的液壓缸活塞位移殘差的RMS均無明顯變化,且一直在閾值之下。通過對(duì)比、分析圖5、圖6和圖7,可以判斷風(fēng)力發(fā)電機(jī)液壓變槳系統(tǒng)葉片1的槳距角傳感器在t=30 s時(shí)發(fā)生故障。
5 總結(jié)
對(duì)風(fēng)機(jī)液壓變槳系統(tǒng)的故障診斷,不僅要考慮干擾和建模誤差,還要考慮噪聲等不確定性因素等對(duì)故障診斷準(zhǔn)確性的影響。針對(duì)這個(gè)問題,利用未知輸入觀測(cè)器的方法將干擾、噪聲和模型的不確定性因素統(tǒng)一視為系統(tǒng)的未知輸入,設(shè)計(jì)魯棒殘差生成器,使未知輸入與干擾解耦,通過仿真結(jié)果驗(yàn)證了使用該方法進(jìn)行故障診斷的有效性和優(yōu)越性。
參考文獻(xiàn)
[1]Zhao H,Wu Q,Hu S,et al.Review of energy storage system for wind power integration support.Applied Energy,2015(137):545-553.
[2]Marques G,Silva F A.Doubly Fed Induction Machine Modeling and Control for Wind Energy Generation [Book News].IEEE Industrial Electronics Magazine,2015,9(3):54-55.
[3]劉瑋.風(fēng)力發(fā)電機(jī)組液壓變槳距系統(tǒng)的建模以及故障診斷[D].北京:華北電力大學(xué),2009.
[4]李金霞.風(fēng)力發(fā)電機(jī)組液壓變槳系統(tǒng)的故障診斷方法研究[D].北京:華北電力大學(xué),2013.
[5]Dolz D,Penarrocha I,Sanchis R.Performance Tradeoffs for Networked Jump Observer-Based Fault Diagnosis. IEEE Transactions on Signal Processing,2015,63(10):2692-2703.
[6]Rahme S,Meskin N.Adaptive sliding mode observer for sensor fault diagnosis of an industrial gas turbine. Control Engineering Practice,2015(38):57-74.
[7]Willersrud A,Blanke M,Imsland L,et al.Fault diagnosis of downhole drilling incidents using adaptive observers and statistical change detection.Journal of Process Control,2015(30):90-103.
[8]Liu X,Gao X,Jian H.Robust unknown input observer based fault detection for high-order multi-agent systems with disturbances.Isa Transactions,2016(61):15-28.
[9]Arrichiello F,Marino A,Pierri F.Observer-Based Decentralized Fault Detection and Isolation Strategy for Networked Multirobot Systems.IEEE Transactions on Control Systems Technology,2015,23(4):1.
[10]胡志坤,孫巖,姜斌,等.一種基于最優(yōu)未知輸入觀測(cè)器的故障診斷方法[J].自動(dòng)化學(xué)報(bào),2013(08):1225-1230.
[11]胡正高,趙國(guó)榮,李飛,等.基于自適應(yīng)未知輸入觀測(cè)器的非線性動(dòng)態(tài)系統(tǒng)故障診斷[J].控制與決策,2016(05):901-906.
〔編輯:白潔〕
猜你喜歡
一重技術(shù)(2021年5期)2022-01-18 05:42:10
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
制造技術(shù)與機(jī)床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術(shù)與機(jī)床(2017年10期)2017-11-28 05:20:43
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動(dòng)工程學(xué)報(bào)(2014年2期)2014-03-01 01:15:22
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
振動(dòng)、測(cè)試與診斷(2014年4期)2014-03-01 01:14:00