迫擊炮供輸彈機械手結構設計和動力學分析
2017-02-09 01:52:01吳海斌趙明升葛建立
兵器裝備工程學報 2017年1期
關鍵詞:設計
秦 準,吳海斌,趙明升,葛建立
(南京理工大學 機械工程學院,南京 210094)
【裝備理論與裝備技術】
迫擊炮供輸彈機械手結構設計和動力學分析
秦 準,吳海斌,趙明升,葛建立
(南京理工大學 機械工程學院,南京 210094)
針對傳統迫擊炮自動化程度低、戰場生存能力差等弱點,設計了用于120 mm迫擊炮的供輸彈機械手,實現3~4發/每分鐘的射擊速度。采用ADAMS 軟件進行機械手的動力學仿真,得到包括炮彈運動參數、機械手振動變形以及關節驅動等關鍵數據。
120 mm迫擊炮;供輸彈機械手;動力學仿真
迫擊炮供輸彈機械手是自動供輸彈機的重要組成部分,是一種用以提高迫擊炮作戰效率和安全性的自動化裝置[1]。雖然和以前相比迫擊炮性能進步很大,但國內在該領域的研究并沒有得到足夠重視,從事相關理論研究和實踐的工作人員較少[2]。本文設計了用于某120 mm自行迫擊炮的供輸彈機械手,對普通迫擊炮的改裝和新型迫擊炮的研發和生產,具有重要意義。
1 供輸彈機械手結構方案設計
1.1 機械手原始設計參數
(a)炮彈質量:17 kg;(b)炮管長:2 000 mm; (c)炮彈尺寸:835 mm;(d)發射角度:60°; (e)發射速度:3~4發/min。
1.2 機械手虛擬樣機模型
本設計采用Solidworks三維實體軟件對供輸彈機械手建模,模型如圖1所示。機械手由驅動裝置、導軌(包括一級固定導軌和二級活動導軌)、平面四連桿機構、絲杠滑臺機構、夾持機構和托盤組成。驅動裝置采用電動推桿、金屬舵機和步進電機,分別控制導軌滑動、夾持手爪張合和絲杠滑臺進退[3]。除平面四連桿部分為細長桿,對穩定性要求較高,采用鋼材料之外,其他機構零件均采用不同強度的鋁合金,減輕了機械手本身質量,降低了高速動作后產生的沖擊振動[4]。

1..電動推桿; 2.導軌; 3.空間四連桿構; 4.絲杠滑臺機構; 5.夾持機構; 6.托盤。
1) 導軌
機械手的導軌部分如圖2所示,包括一級固定導軌1、二級活動導軌2、直線導軌3和光軸導軌4;一級固定導軌1通過U型板與迫擊炮身管固定在一起,二級活動導軌2套合在一級固定導軌1上設置的直線導軌3,二級導軌2可以在一級固定導軌1上直線滑動。
二級導軌2作為四連桿機構、夾持機構等的運動載體。電動推桿與二級活動導軌機械連接,作為使二級導軌滑動的驅動力。

1.一級固定導軌; 2.二級活動導軌; 3.直線導軌 4.光軸導軌。
2) 平面四連桿機構
圖3是四連桿的機構運動簡圖,虛線為初始位置。具體結構包括“r”型絲杠端連桿1、中間連桿2和前端連桿3以及盤簧,其結構附著在二級活動導軌內側表面。曲柄處設置的盤簧產生的彈性抗力和輾壓活動板對其的支撐力相平衡,維持“r” 型絲杠端連桿偏轉的位置。在到達規定位置之后,連桿受前端壓力順時針旋轉,帶動炮彈下移。前端連桿與中間連桿的連接桿在夾持基座的空腔內活動,其運動狀態由夾持基座的高度決定,也就是由彈丸與身管的軸線間距決定。由于四連桿變形大,在仿真時采用柔性化設計,更接近真實情況[5]。
3) 夾持機構
夾持機構用于裝夾炮彈,設計時除了考慮裝夾的穩定性和快速性之外,還要保證炮彈裝夾的可靠性,為此設計了兩個舵機。當其中一個舵機失效時,另外一個舵機可以繼續工作。兩個齒輪機械手之間的嚙合作用能保證彈丸夾持狀態穩定,提高了輸彈過程中的可靠性。具體結構包括金屬舵機、夾持基座、齒輪機械手和光軸導軌滑塊。
4) 絲杠滑臺機構
通過絲杠步進電機的控制,該機構可以改變輾壓活動板的位置,實現其與四連桿機構中的“r” 型絲杠端連桿的接觸和脫離,即有無支撐力的狀態,實現對四連桿和夾持機構的控制。
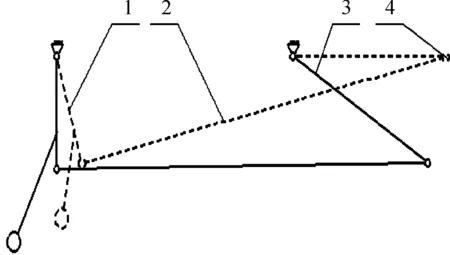
圖3 四連桿機構運動簡圖
2 多體動力學分析
供輸彈機械手的多體動力學分析要考慮各關節運動速度、加速度、力矩以及慣量等因素[6],通過對各部分運動規律和受力的分析研究,驗證方案設計的合理性。本設計使用動力學分析軟件Adams。
2.1 廣義坐標的選取和數學模型

式中,T為系統動能;q為系統廣義坐標陣;Q為廣義力列陣;λ為拉氏乘子列陣[8]。
2.2 機械手運動過程
手爪夾持炮彈→二級活動導軌前進1 000 mm(曲柄受重轉動)→曲柄順時針旋轉19°(帶動炮彈下降160 mm)→絲杠滑臺后退305 mm→手爪松開→二級活動導軌后退(絲杠滑臺前進)→回到初始位。
2.3 動力學仿真
仿真時建立如下坐標系:Z軸沿身管軸線指向炮口為正,Y軸垂直于Z軸向上為正,X軸的正向滿足右手定則。將Solidworks環境下建立的機械手模型以ADAMS 能較好識別的Parasolid格式導出,然后將三維模型導入Adams。設置好工作環境,在 ADAMS 環境中生成的供輸彈機械手的虛擬樣機如圖4所示。各部件的約束關系如表1所示。
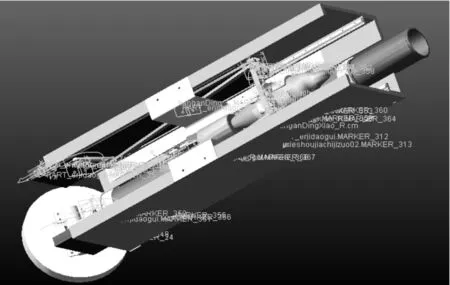
圖4 機械手動力學模型
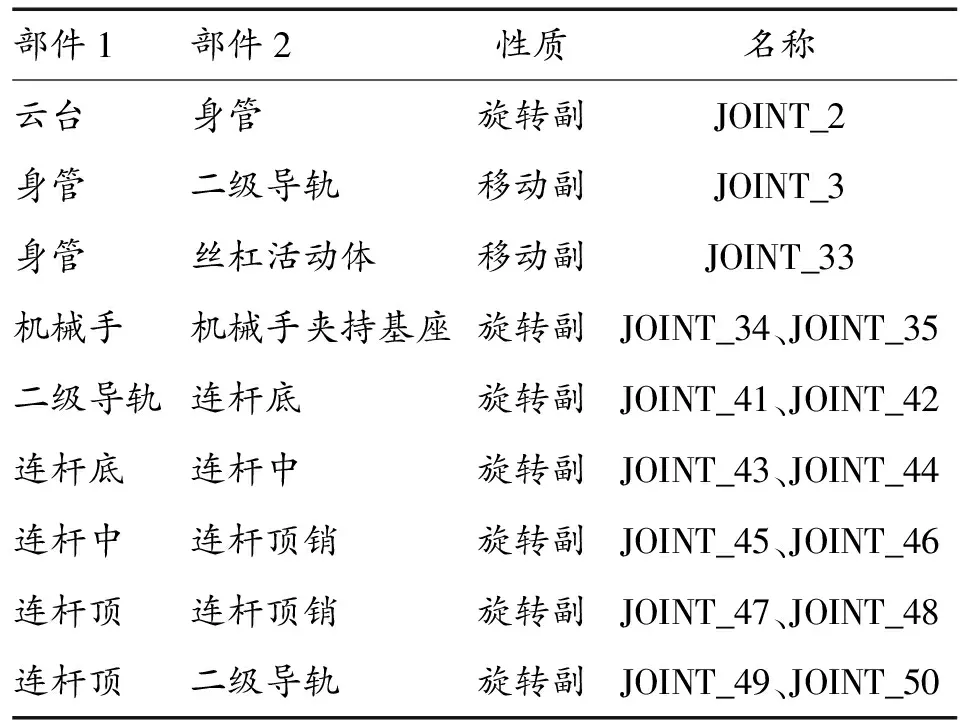
部件1部件2性質名稱云臺身管旋轉副JOINT_2身管二級導軌移動副JOINT_3身管絲杠活動體移動副JOINT_33機械手機械手夾持基座旋轉副JOINT_34、JOINT_35二級導軌連桿底旋轉副JOINT_41、JOINT_42連桿底連桿中旋轉副JOINT_43、JOINT_44連桿中連桿頂銷旋轉副JOINT_45、JOINT_46連桿頂連桿頂銷旋轉副JOINT_47、JOINT_48連桿頂二級導軌旋轉副JOINT_49、JOINT_50
Adams的主要仿真參數如下:電動推桿的驅動函數為STEP(time,1.5,0.0,6.5,-1000.0)+STEP(time,8.5,0.0,13.0,305.0)+STEP(time,14.0,0.0,18.0,695.0),夾持機構的驅動函數為STEP(time,13.0,0.0d,14.0,-30.0d),絲杠滑臺的驅動函數為STEP(time,5.5,0.0,10.0,-305.0)。為了實現3~4發/min的快速打擊,仿真時間設置為18 s(包括1.5 s云臺升起時間),在各關節處添加驅動,繪制炮彈的位移曲線如圖5所示。
圖6為炮彈在X方向的位移曲線圖,圖7為炮彈在X方向的振動速度圖。為了準確得到機械手各部件的變形和受力,模擬真實情況,本仿真設計采用了Adams柔體建模,因此X方向存在微幅振動[9]。從結果圖可以發現,X方向位移近似不變,振動速度關于橫坐標軸對稱,最大速度在云臺抬起位置處,約為6.5 m/s,滿足設計要求。
圖8為二級活動導軌的速度和加速度曲線圖。從仿真結果可以看出,二級活動導軌的加速度最大值為0.28 m/s2,由牛頓第二定律F=ma,可求得電動推桿的最大推力,為電動推桿的選擇提供依據。
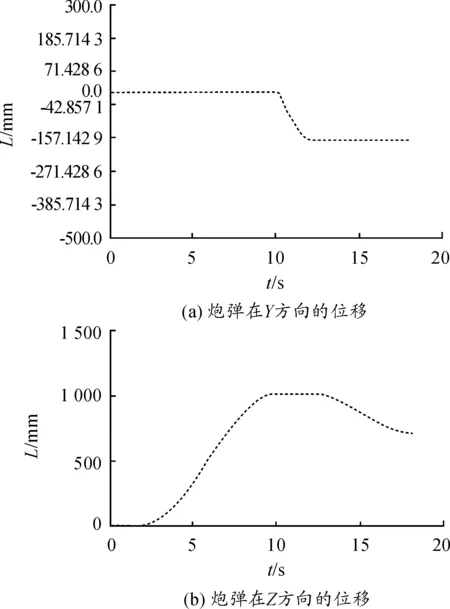
圖5 炮彈在Y和Z方向的位移
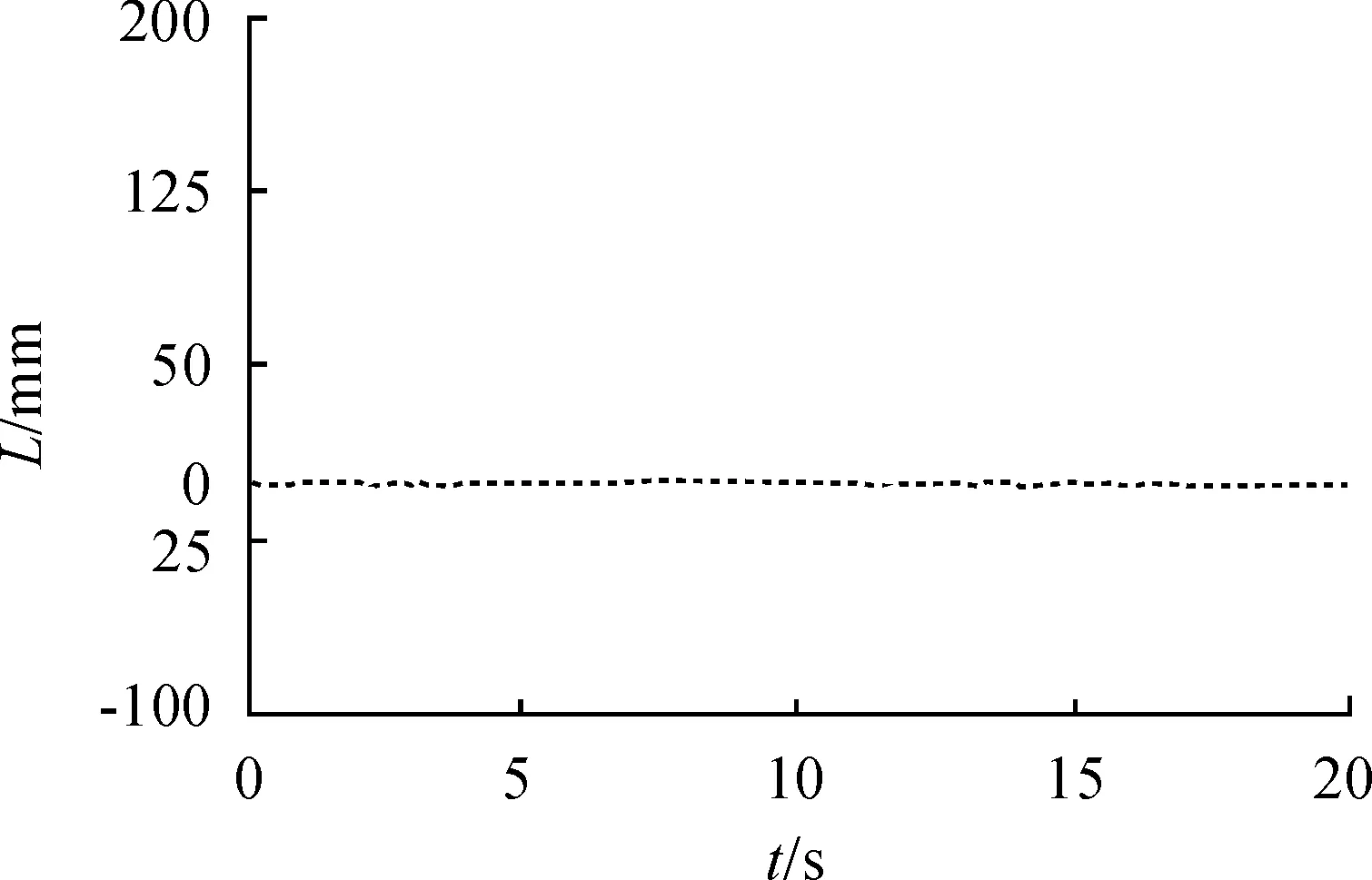
圖6 炮彈在X方向的位移

圖7 炮彈在X方向的振動速度
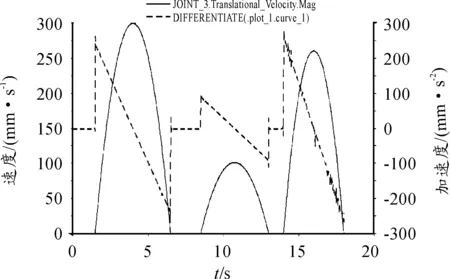
圖8 二級活動導軌的速度和加速度
圖9是夾持裝置的角速度和角加速度曲線圖,對該仿真結果的分析有利于舵機設計。

圖9 夾持裝置的角速度和角加速度
3 結論
1) 該供輸彈機械手性能滿足設計要求,驗證了設計方案的合理性。
2) 各個部件的位移、速度、力矩、角加速度和轉角的關系曲線為機械手控制的研究和設計提供參考。
[1] 談樂斌,張相炎.火炮概論[M].北京:北京理工大學出版社,2014.
[2] 徐鳳軍.迫擊炮自動前裝填技術研究[D].太原:中北大學,2014.
[3] 楊軍榮,何永.自動迫擊炮的供輸彈方式研究[J].火炮發射與控制學報,1997(4):40-44.
[4] 吳迪,李健,喬萌.基于AMESim的氣動機械手結構設計與仿真分析[J].廣西科技大學學報,2016,27(2):62-68.
[5] 邱海飛.基于ADAMS的四連桿打緯機構動態設計與仿真[J].機械傳動,2011,18(7):52-55.
[6] ZAKHARIEV E.Dynamics of rigid multibody systems with clearances in the joints[J].J Mechanics of Structures and Machines,1999,27(1):63-87.
[7] 李本,任國全,李冬偉.履帶式自行火炮射擊時動力學仿真分析[J].系統仿真學報,2014,26(2):475-480,488.
[8] 石明全,劉雷,陳運生.某火炮自動供彈機動力學分析[J].南京:南京理工大學學報,2003,27(3):252-255.
[9] 馬衛軍.自行迫擊炮自動供輸彈機械手的設計及其動力學仿真分析[D].南京:南京理工大學,2004:50-53.
(責任編輯周江川)
Structural Design and Dynamic Analysis of Robotic Manipulator for a Mortar
QIN Zhun, WU Hai-bin, ZHAO Ming-sheng, GE Jian-li
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
Aimed at the low automation and the poor viability of the traditional mortar, a robotic manipulator for a mortar was designed to achieve the quick strike of 3 to 4 rounds per minute. The dynamic simulation of the manipulator was carried out by using ADAMS. The key data including motion parameters of the projectile, the vibration and deformation of the manipulator and the drive of joints were obtained.
120 mm mortar; robotic manipulator for the ammunition feed; dynamics simulation
2016-09-20;
2016-10-25
國家級大學生創新創業訓練計劃項目資助(201510288006)
秦準(1995—),男,主要從事機械設計制造及其自動化研究。
葛建立(1980—),男,博士,副教授,主要從事非線性有限元、虛擬樣機以及等幾何分析研究。
10.11809/scbgxb2017.01.014
秦準,吳海斌,趙明升,等.迫擊炮供輸彈機械手結構設計和動力學分析[J].兵器裝備工程學報,2017(1):55-58.
format:QIN Zhun, WU Hai-bin, ZHAO Ming-sheng, et al.Structural Design and Dynamic Analysis of Robotic Manipulator for a Mortar[J].Journal of Ordnance Equipment Engineering,2017(1):55-58.
TJ31
A
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
