面向家庭的服務型機器人的設計與實現(xiàn)
2017-02-07 13:05:52韓喆賈寧
軟件 2016年7期
韓喆+賈寧
摘要:本文實現(xiàn)一個面向家庭的服務型機器人,利用智能機器人和手機端控制將用戶從這些繁瑣的家庭勞動中解脫出來。通過利用此設備,可以幫助用戶控制機器人上安置的攝像頭,利用Android手機客戶端或PC端遠程監(jiān)控家中的環(huán)境信息。此外,利用機器視覺實現(xiàn)家中信息自助獲取、圖像繪制,通過WIFI接收圖片信息,利用face++進行人臉分析,或者圖片分析。從而實現(xiàn)自主避障、清潔等功能。此機器人包括以下四種運行模式:紅外模式、跟蹤模式、邊沿模式、人為控制模式。其中,前三種模式通過特定的傳感器實現(xiàn)機器人的行走與清潔。人為控制模式則是利用手機客戶端進行定性的控制。用戶可根據(jù)實際情況自主選擇模式進行機器人的使用。
關鍵詞:服務型機器人;實時監(jiān)控;手機客戶端;運行模式
引言
隨著科學技術的進步,機器人開始在各種領域大展身手,除了在軍事、航空、制造等傳統(tǒng)領域之外,近年來機器人開始在醫(yī)院、家庭等服務行業(yè)開展廣泛的應用,普通機器人既能接受用戶的方向性指揮,又可以運行預先編排的程序,依靠其高度自動化,為用戶提供服務。
目前,機器人除了依靠傳統(tǒng)的位置、速度、加速度等傳感器外,視覺、觸覺、聲覺等多種傳感器的融合技術已經(jīng)開始成熟應用于機器人之中,加之元器件的高度集成,體積的急劇縮小。這些因素導致服務型機器人的流行,機器人使用這些集成的傳感器去感受用戶的需求,去適應、學習周邊的家庭環(huán)境。用戶通過使用這種機器人把用戶從繁重的家務勞動中解放出來,而在家庭勞動需求中,衛(wèi)生掃除占據(jù)70%以上。因此很多商家將機器人的服務視角放到打掃機器人身上,但是由于開發(fā)時間短、市場需求量大、造價高、有安全隱患等因素,導致以打掃為主的服務型機器人有很大的市場空間和市場潛力。而目前市場上的打掃機器人,底盤操作的噪音較大,若使用普通的遙控器,容易丟失,而且充電麻煩,浪費電池。
基于以上問題,本文設計了一款服務于家庭的掃地機器人,用戶可以使用Android手機對機器人進行控制,方便而且節(jié)能,同時此機器人提供多種工作模式,用戶可根據(jù)自身情況進行模式挑選,而且產品造價成本低廉,適應于經(jīng)濟型家庭進行選擇。
2服務型機器人硬件設計
此服務型機器人采用增強型的51內核單片機STCllF32XE,低功耗,可抗干擾,內置雙路全橋驅動電路,利用舵機實現(xiàn)攝像頭的轉動,利用紅外、雷達傳感器代替機器人的觸覺,用了3個鋰電池為小車提供動力。
2.1設計思路
傳統(tǒng)的打掃過程在打掃角落環(huán)節(jié)中,需要浪費大量的時間,隨時產生的垃圾、床底黑暗角落,掃起來非常麻煩。
此機器人融合若干傳感器的功能,實現(xiàn)硬件與軟件之間的實時通訊,快速傳遞信息,完成用戶的需求。
此機器人可以通過Android手機進行控制,利用攝像頭查看較低位置的死角,之后控制機器人去清潔死角。此外,可以利用跟蹤模式,清理新產生的垃圾。
現(xiàn)在市場上的機器人用圓盤吸塵,盡管吸塵效果好,但是產生的噪音大,所以此機器人采用傳統(tǒng)的拖布,可以隨時更替,且噪音較小,同時使用Android手機客戶端代替?zhèn)鹘y(tǒng)的遙控器進行實時控制,充電方便,而且更加環(huán)保。面對家中的障礙物和特殊情況,可以設計不同的響應模式,方便用戶自主選擇。
2.2硬件設計
此機器人提供了舵機、充電、紅外、雷達、充電器、WiFi模塊接口和馬達,大容量電池提供電量,增加了流水燈、提醒等功能,通過WIFI模塊、UDP通訊方式、Android手機進行穩(wěn)定通信。圖1是此機器人的硬件結構圖。圖2是機器人的通訊接口圖。
2.3機器人運行模式
根據(jù)用戶的需求,此機器人包含以下幾種運行模式:
1.避障模式:躲避家中的障礙物,隨機清掃衛(wèi)生,利用紅外進行對周邊事物的感應,用左右舵機加減速來避障礙物;
2.控制模式:通過Android手機發(fā)送WIFI指令,實現(xiàn)對機器人的控制;
3.邊沿模式:邊沿打掃功能,通過控制行進角度避免損害障礙物,同時進行死角打掃,利用紅外和雷達,先調整機器人即將行進的角度,再進行邊沿行進,確保不會碰到障礙物;
4.跟蹤模式:可以根據(jù)跟蹤模式,跟隨用戶進行實時方位的清潔,通過雷達控制距離,通過紅外調整方向,通過攝像頭來判斷是否跟蹤人或是物品。
5.監(jiān)控模式:利用WIFI模塊,通過UDP方式進行家中實時環(huán)境的監(jiān)控。
3服務型機器人軟件設計方案
此機器人的軟件設計主要針對Android手機客戶端,軟件的主界面可接收實時傳來的攝像頭視頻數(shù)據(jù),可以通過按鍵讓手機拍下當前以攝像頭為第一視角的圖片。
主界面上有選擇功能模式的4個按鈕,可以選擇機器人的運行模式,如:避障模式、邊沿模式、跟隨模式等,同時可以前、后、左、右控制機器人的行為,也可以利用上、下、左、右4個鍵來控制攝像頭調整監(jiān)控視角,此外,加速、減速兩個按鈕可以控制機器人的行動速度。
3.1跟蹤功能
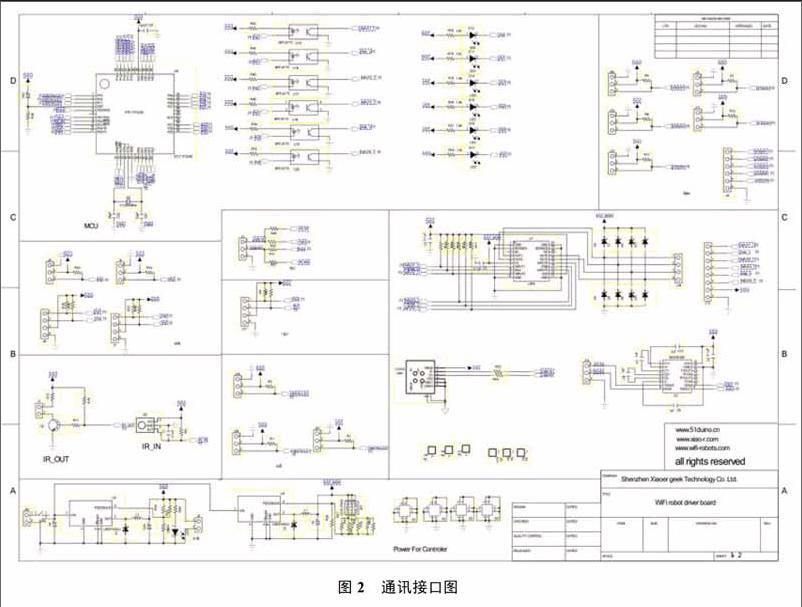
跟蹤功能的主要對象是操作用戶,此機器人可以跟隨用戶的腳步,進行即時移動和清潔。
此功能的設計思路是,利用Android手機客戶端發(fā)送指令開啟此功能,利用不同傳感器返回的距離值進行判斷,利用紅外傳感器控制、跟蹤用戶的方向,利用返回值判斷前方有無障礙物,利用雷達控制機器人和用戶之間的距離,利用攝像頭判斷是否正確跟蹤用戶。使用face++功能識別用戶面部,判斷跟蹤是否正確。圖3是跟蹤功能的流程圖。
3.2避障功能
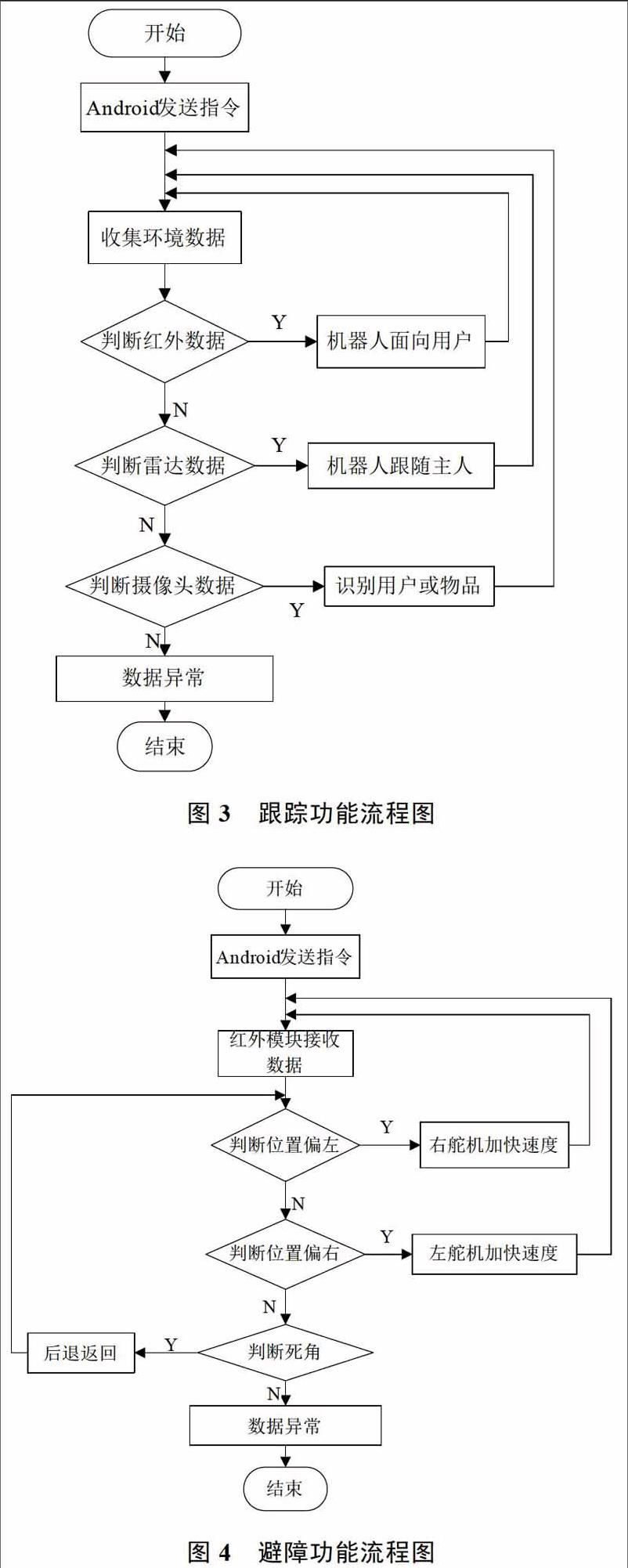
此功能主要利用紅外模塊進行判斷前方、左右有無障礙物,對周邊環(huán)境的進行預判。
此功能的實現(xiàn)思路是,當前方、左右無障礙物時,進行正常行進;當右邊有障礙物時,左舵機加速移動;當左邊有障礙物時,右舵機加速移動;當卡入死角時,先后退到安全距離,然后判斷左右障礙物的距離,進行左右偏轉后行進。圖4是避障功能流程圖。
4結論
此服務型機器人采用紅外、雷達、攝像頭等模塊,結合Android手機客戶端,實現(xiàn)對家庭的清潔管理與監(jiān)控。此外,該機器人清潔過程的分貝較低,而且操控方式簡單,只需手機安裝應用程序即可直接操控機器人,為了方便用戶使用,此機器人提供多種模式可供用戶選擇。
以上優(yōu)勢均為此服務型機器人設備的推廣提供了良好的基礎,在此版本機器人的基礎上,設計者將進一步增加客戶端的類型與機器人的功能,為用戶提供更好的操作體驗。