中速磨煤機制粉系統的推斷預測控制方法
2017-02-07 09:12:57李益國
發電設備 2017年1期
焦 健, 李益國, 沈 炯
(東南大學 能源與環境學院, 南京 210096)
中速磨煤機制粉系統的推斷預測控制方法
焦 健, 李益國, 沈 炯
(東南大學 能源與環境學院, 南京 210096)
針對中速磨煤機制粉系統進行了機理建模,采用現場數據,使用預報誤差法對模型參數進行辨識,得到一個較為準確的模型。再根據機理模型,采用滾動時域估計方法對中速磨煤機出口煤量進行估計,并同模型的輸出進行了比較。分析了現有中速磨煤機控制系統存在的不足,提出將中速磨煤機出口煤量作為被控量,設計推斷預測控制器。仿真結果表明:這種推斷預測控制方法可以縮短制粉系統側的延遲時間,加快機組對AGC指令的響應。
中速磨煤機; 滾動時域估計; 預測控制
目前火電廠普遍采用中速磨煤機直吹式制粉系統,它是耦合性強、大滯后、多輸入-多輸出的非線性系統,其動態特性隨著運行工況的變化而大范圍變化,傳統的PID加解耦的控制手段很難做到精確控制,從而會導致機組對AGC指令響應變差,磨煤機出口溫度控制不穩定,影響機組運行的安全性與經濟性。
另一方面,由于出口煤量難以在線測量,因此傳統控制系統只能通過控制一次風量間接控制。然而一次風量和出口煤量間不是簡單的線性關系,通過控制一次風量無法及時消除水分、可磨性系數等煤質參數變化的影響,容易造成實際煤量與燃料量指令產生比較大的偏離,進而影響機組負荷跟蹤的精度和壓力穩定。
國內外學者在中速磨煤機制粉系統出口煤量的估計方面均有一定研究,如基于龍伯格觀測器[1-2]、擴展卡爾曼濾波[3-4]、神經網絡[5]等方法估計出口煤量,并將其用于控制器的設計。
筆者將預測控制技術和軟測量技術相結合,提出一種推斷預測控制方法。該方法把中速磨煤機制粉系統整體看作一個多變量對象,采用多變量預測控制算法來處理,其中利用滾動時域估計算法對入爐煤量進行在線估計,并利用估計值構成閉環反饋回路,因此稱為推斷預測控制。
1 制粉系統的機理建模及參數辨識
1.1 制粉系統機理建模
中速磨煤機制粉系統主要包含冷風和熱風管道、給煤機和磨煤機三個部分[6-8]。
(1) 給煤機模型。
Ff=3 600ωflf
(1)
式中:Ff為進入給煤機的煤量,t/h;ωf為給煤機皮帶轉速,m/s;lf為皮帶上的原煤質量,t/m。
(2) 管道模型。
Fa=μcQc,max+μhQh,max
(2)
(3)
式中:Fa為一次風流量,t/h;Ta為一次風溫度,℃;μc為冷風閥門開度,%;μh為熱風閥門開度,%;Tc為冷風溫度,℃;Th為熱風溫度,℃;Qc,max、Qh,max為冷、熱風管道最大流量,t/h。
(3) 磨煤機模型。
(4)
式中:Mcoal為磨碗存煤量,t;Fg為磨碗磨出的煤量,t,Fg(t)=KHKRKAKMKjdKmMcoal(t),其中KH為可磨性系數,KR為煤粉細度系數,KA為灰分系數,KM為水分系數,Kjd為磨輥破損系數,Km為磨煤機系數;Fsep為分離器回粉量,t。
CcoalFf(t)(1-Mar/100)Tcoal+
CairFa(t)Ta-[CcoalFg(t)+
CairFa(t)]Tout(t)+CwaterMar[Ff(t)Tcoal-
Ff(t)Tout(t)]-Ff(t)Marγ
(5)
式中:Ccoal、Cair、Cwater為煤、空氣、水的比熱容;Tout為磨煤機出口溫度,℃;Tcoal為原煤溫度,℃;Mar為原煤水分;γ為水的汽化潛熱,kJ/kg。
(6)
式中:Ksep為分離器回粉系數;ωsep為分離器轉速;K1、K2、K3為待辨識參數。
Fsep(t)=(Ksep+A)Fg(t)
(7)
Fout(t)=Fg(t)-Fsep(t)
(8)
式中:A為原煤灰分;Fout為磨煤機出口煤量,t。
(9)
式中:p1、p2、p3為待辨識的參數。
這些公式描述了制粉系統所包含的設備,完整地體現了中速磨煤機制粉系統的運行特性。
1.2 模型參數辨識
在機理建模的基礎上,使用某300 MW火電機組中速磨煤機制粉系統的現場運行數據對模型參數進行辨識。給煤機皮帶轉速、冷風閥門開度和熱風閥門開度作為輸入量,磨煤機出口溫度和進出口壓差作為輸出量,對7個未知參數進行辨識。辨識方法采用預報誤差法[9],其過程如下:
首先,令
Y(k)=[Δp(k),Tout(k)]T,
u(k)=[ωf(k),μc(k),μh(k)]T,
θ=[Km,K1,K2,K3,p1,p2,p3]T
這樣,制粉系統模型可以寫成
Y(k)=f(Y(k-1),…Y(1),Y(0),
u(k-1),…u(1),θ)+e(k)
(10)
其中e(k)表示噪聲項,令
(11)
可以通過極小化預報誤差的方法來獲得k時刻系統輸出的最優預報值,即它的數學期望值
(12)
8個參數的辨識結果見表1。

表1 參數辨識結果
同時選取另一組現場數據對模型參數進行驗證,結果見圖1和圖2。由圖1、圖2可見:磨煤機的出口溫度值和測量值存在一定偏差,但偏差較小,而變化趨勢基本吻合;進出口壓差則基本一致,說明辨識精度較高,該機理模型可以較好地描述中速磨煤機制粉系統。

圖1 出口溫度的模型值與測量值比較

圖2 進出口壓差的模型值與測量值比較
2 出口煤量估計
采用軟測量方法對磨煤機出口煤量進行估計[10-11],并利用估計值作為反饋量構成反饋控制。
出口煤量的估計具體步驟如下:
(1) 確定系統的狀態量、觀測量和輸入量。
選取給煤皮帶轉速、冷風閥門開度和熱風閥門開度作為輸入變量;磨煤機內存煤量和出口溫度作為系統的狀態變量;進出口壓差和出口溫度作為可觀測的輸出變量。
狀態量:x=[Mcoal,Tout]T
(13)
觀測量:Y=[Δp,Tout]T
(14)
輸入量:u=[ωf,μc,μh]T
(15)
(2) 根據第1節所建立的機理模型,利用滾動時域估計方法對系統狀態量進行估計。滾動時域估計的目標函數可以寫成
(16)
S.t.Yk=h(xk,uk)+vk
xk=f(xk-1,uk-1,wk-1)
式中:v為觀測噪聲;目標函數的第一項表示觀測噪聲的影響,第二項表示外部干擾的影響,第三項為到達代價函數;N表示滾動時域估計的窗口長度。
針對上述系統模型,滾動時域估計的目標函數可以寫成
(17)
對目標函數進行求解,可以估計出當前時刻的系統狀態。
(3) 計算出口煤量。
對式(5)~(9)進行整理,可以得到出口煤量的估計值
KHKRKAKMKjdKgMcoal
(18)
最后,取0~500 s內的歷史數據進行仿真實驗。在仿真實驗中,令N=10。將模型的出口煤量與根據滾動時域估計和擴展卡爾曼濾波方法得到的出口煤量估計值進行比較,見圖3。結果表明:采用滾動時域估計算法得到的出口煤量與實際值相比,沒有出現大幅度偏差,說明采用這種方法估計出的出口煤量是準確的。與擴展卡爾曼濾波方法相比,滾動時域估計的結果偏差更小,說明采用的滾動時域估計方法更具有優勢。表2為兩種估計算法的偏差平方和。

注:MHE—滾動時域估計;EKF—擴展卡爾曼濾波;Real—真實值。

圖3 出口煤量估計值與給煤指令比較
3 中速磨煤機的推斷預測控制方法
3.1 模型預測控制基本原理
傳統的控制方案是以一次風量和出口溫度作為輸出量,冷風和熱風閥門開度作為控制量,采用解耦PID進行控制。這種控制方法需要進行解耦,較為復雜,而且不能處理輸入約束。采用狀態空間模型的預測控制方法可以很好地解決這兩個問題。針對中速磨煤機制粉系統,將給煤機皮帶轉速、冷風和熱風閥門開度作為控制量,磨煤機出口煤量的估計值、出口溫度和一次風量作為輸出量,從而構成一個3×3的控制系統[12],見圖4。
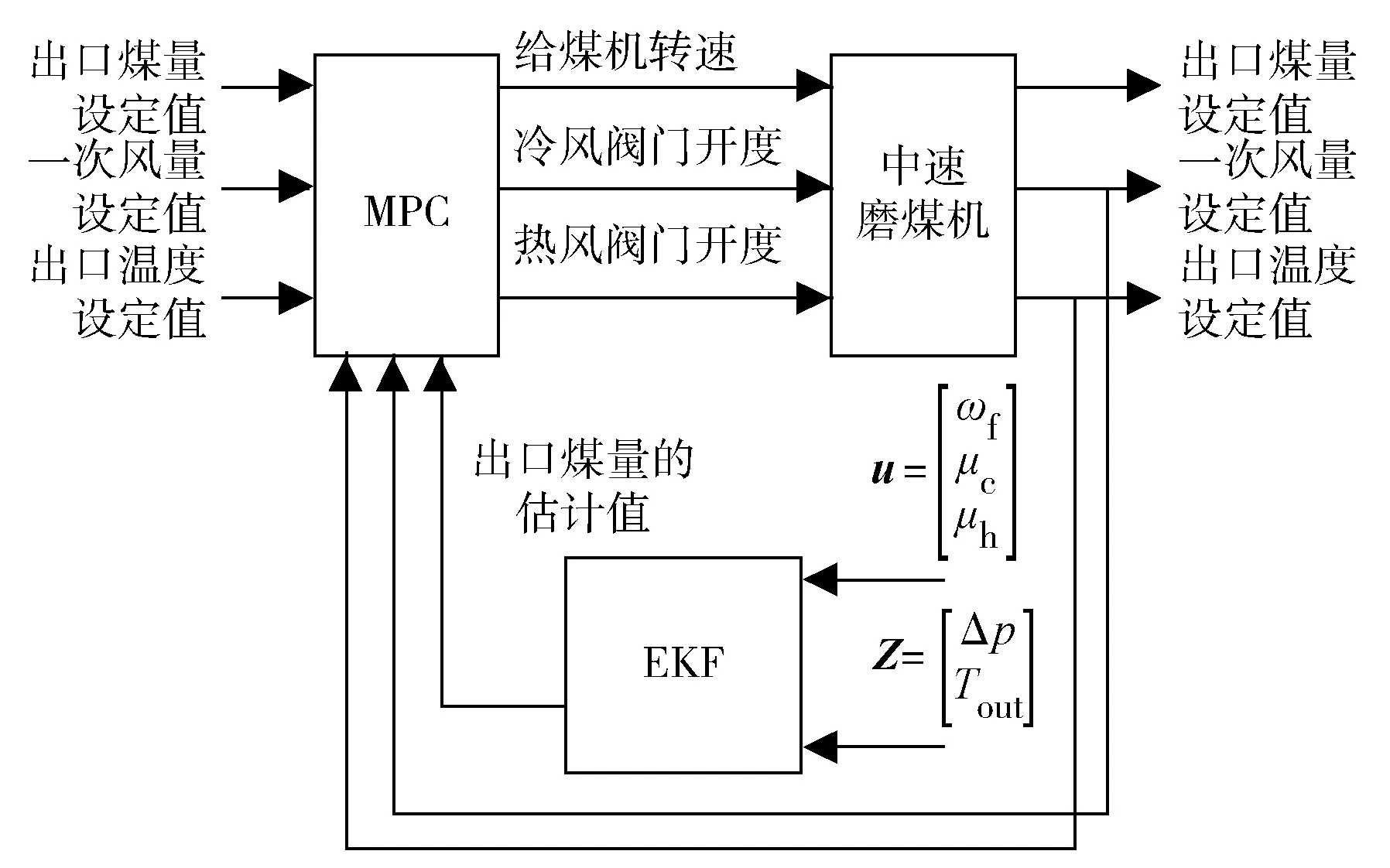
MPC—模型預測控制。
在確定了系統的控制量和輸出量后,對狀態空間模型的預測控制方法進行推導,步驟如下:
(1) 對中速磨煤機機理模型進行辨識,得到系統的狀態空間模型。
(19)
(2) 寫出預測值的表達式。
Y(k)=ΦX(k)+Γu(k-1)+GyΔU(k)
(20)
式中各個矩陣的具體形式如下:
式中:NP為預測時域;Nc為控制時域。
(3) 設置狀態觀測器,對每一時刻系統的狀態進行估計,用狀態的估計值代替實際狀態,觀測器采用卡爾曼濾波器。狀態估計值為:


(21)
(4) 求解有約束條件下的目標函數,得到最優的控制量。目標函數為:

(22)
式中:Yref表示輸出量的設定值,包括給煤指令和出口溫度設定值。
然后將式(22)改寫成二次型形式:
(23)
式中,矩陣H,f,r,c的表達式如下:
其中,矩陣T是由單位矩陣構成的上三角矩陣,矩陣F是由單位矩陣組成的分塊矩陣。
(5) 計算最優控制律。
Δu(k)=[I,0,…,0]ΔU(k)
(24)
3.2 仿真實驗
在0 s時,制粉系統處于穩定狀態,煤的可磨性指數為60,水分為10%,灰分為15%。令給煤指令階躍3t,同時一次風流量指令調整到75.8t,出口溫度保持不變。分別采用PID方法控制和第3.1節中推導的預測控制方法進行控制。PID參數采用靜態解耦法進行整定,k1,p=-0.091,k1,i=-3.78,k2,p=0.032 4。圖5~圖7為3個輸出量的響應曲線,圖8~圖10為三個輸入量的變化曲線。從仿真結果可以看出:模型預測控制不僅可以使輸出量較好地跟蹤設定值,同時能保證各輸入量的波動幅度也在允許的范圍內。

圖 5 出口煤量響應曲線

圖6 出口溫度響應曲線

圖7 出口煤量響應曲線
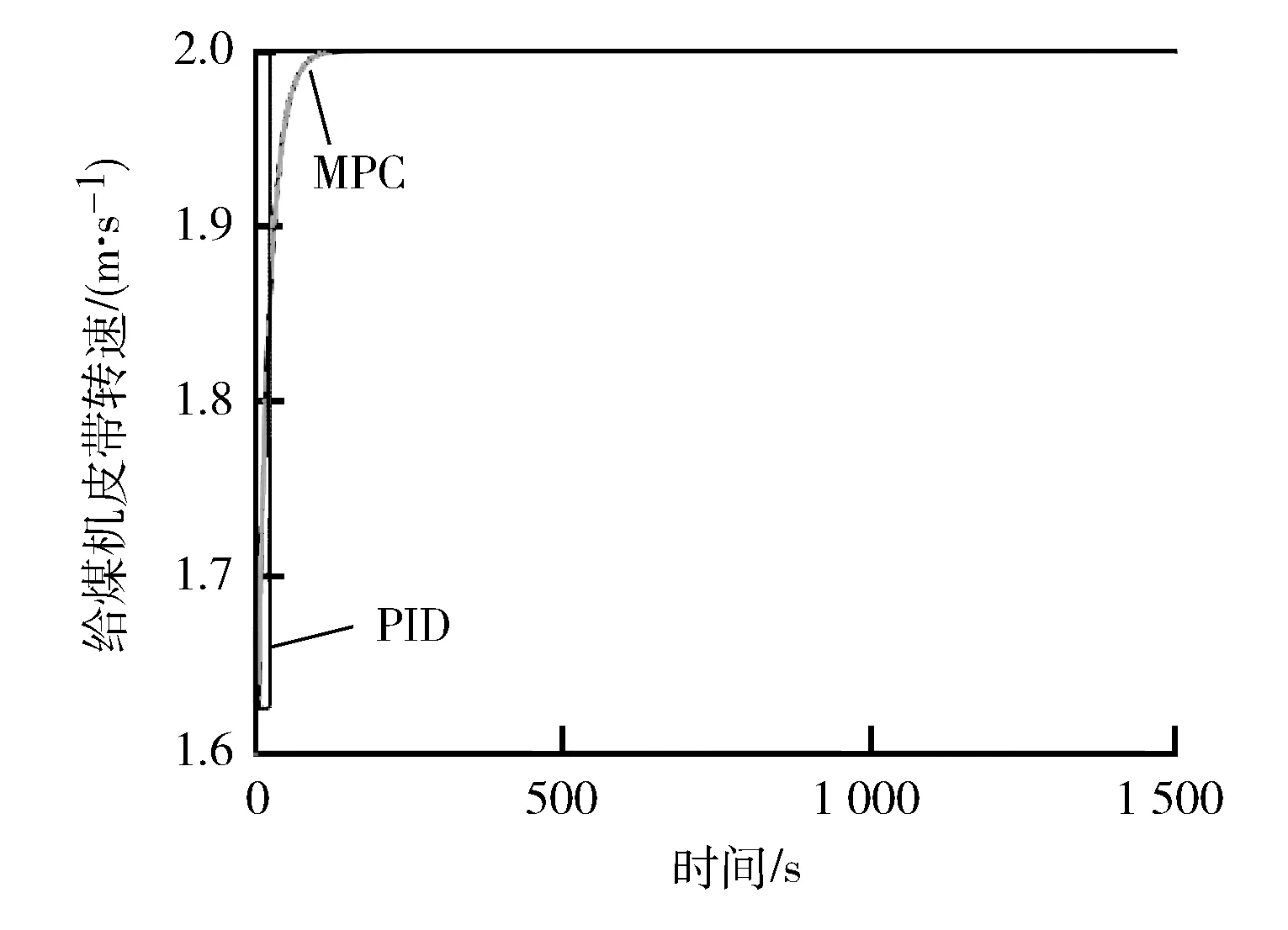
圖8 給煤機轉速變化曲線
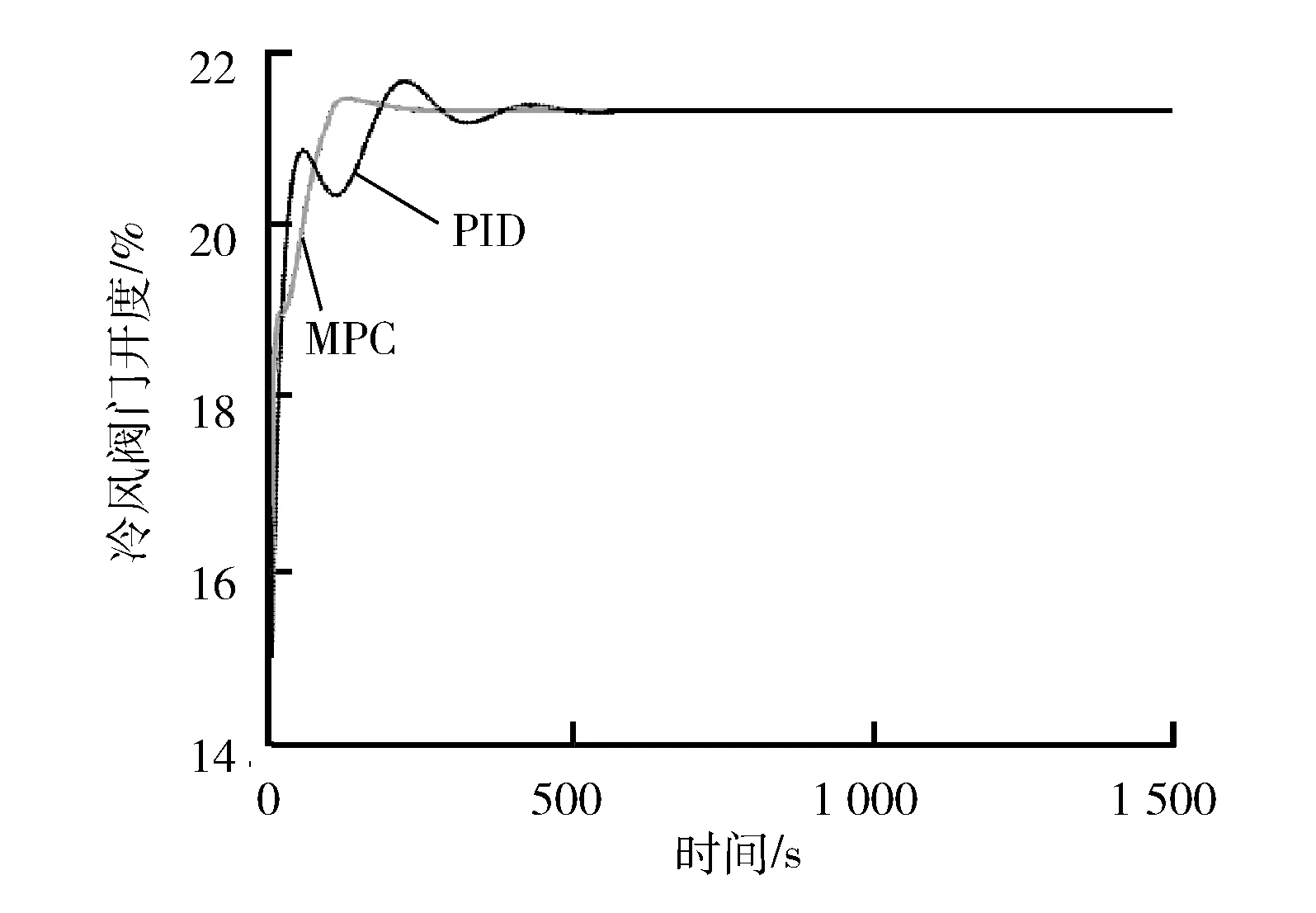
圖9 冷風閥門開度變化曲線
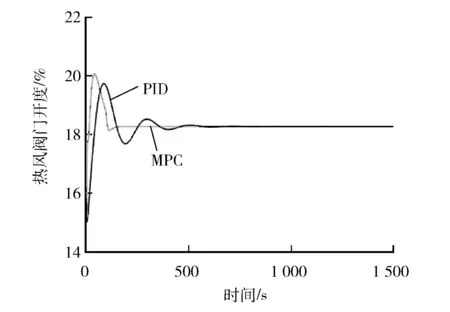
圖10 熱風閥門開度變化曲線
4 結語
仿真結果表明:預測控制算法在出口煤量的調節上要快于傳統的PID控制方式,煤量達到設定值的時間縮短了近20 s,明顯縮短了制粉系統側的延遲時間。同時,在出口溫度和一次風量的調節上效果也要略優于PID方法。由此可見,這種推斷預測控制方法在解決制粉系統大延遲方面有明顯的效果,也可應用于其他包含不可測變量的系統中。
[1] NIEMCZYK P, ANDERSEN P, BENDTSEN J D, et al. Derivation and validation of a coal mill model for control[J]. IFAC Proceedings Volumes, 2009, 42(9): 233-238.
[2] BARNOSKI S, GRAVES J, LABBE D, et al. Coal mill and combustion optimization on a once-through, supercritical boiler with multivariable predictive control[C]//Joint ISA POWID/EPRI Controls and Instrumentation Conference. New Orleans, USA: ISA, 2004.
[3] SHIN H B, LI X L, JEONG I Y, et al. Modeling and parameter identification of coal mill[J]. Journal of Power Electronics, 2009, 9(5): 700-707.
[4] CORTINOVIS A, MERCANG?Z M, MATHUR T, et al. Nonlinear coal mill modeling and its application to model predictive control[J]. Control Engineering Practice, 2013, 21(3): 308-320.
[5] 張自成,費敏銳. 基于人工神經網絡的中速磨存煤量軟測量方法[J]. 自動化儀表,2006,27(增刊1): 59-62.
[6] 曾德良,高珊,胡勇. MPS型中速磨煤機建模與仿真[J]. 動力工程學報,2015,35(1): 55-61.
[7] 張柯. 神經網絡在直吹式制粉系統中速磨煤機建模中的應用研究[D]. 南京: 東南大學,2006.
[8] 秦軍波. 基于Modelica/Dymola的鍋爐輔機系統建模與仿真[D]. 北京: 華北電力大學,2010.
[9] 李青茹,王培峰. 基于預報誤差法的神經網絡辯識[J]. 現代電子技術,2006,29(23): 90-91.
[10] 趙海艷. 時域約束系統的滾動時域估計方法研究[D]. 長春: 吉林大學,2007.
[11] 王曌,劉志遠,裴潤. 一種滾動時域估計方法在目標跟蹤中的應用[J]. 機器人,2001,23(7): 594-597.
[12] 鄒濤,丁寶蒼,張端. 模型預測控制工程應用導論[M]. 北京: 化學工業出版社,2010.
Inferential Predictive Control of a Medium-speed Coal Mill
Jiao Jian, Li Yiguo, Shen Jiong
(School of Energy and Environment, Southeast University, Nanjing 210096, China)
A mechanism model was established for the pulverizing system of a medium-speed coal mill, of which the parameters were identified with field data by prediction error method, so as to obtain a more accurate model. According to the mechanism model, the moving horizon estimation method was used to estimate the outlet flow of the coal mill, and subsequently the estimated results were compared with model outputs. Based on analysis of the disadvantages existing in the control system of present medium-speed coal mills, an inferential predictive controller was designed by taking the mill outputs as the controlled variables. Simulation results show that the new control method can shorten the delay time of the coal pulverizing system and speed up the response of the unit to AGC command.
medium-speed coal mill; moving horizon estimation; predictive control
2016-04-06;
2016-05-23
焦 健(1990—),男,在讀碩士研究生,研究方向為熱工對象建模及預測控制。
E-mail: george-jiao@163.com
TK223.25
A
1671-086X(2017)01-0009-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19