機載Lidar建筑物點云中非建筑物點剔除研究
2017-02-06 15:44:12魏廣宇
價值工程 2017年2期
魏廣宇
摘要:激光雷達建筑物點云處理過程中往往會混入非建筑物點。本文將點云數據與數字線劃圖融合,進行粗提取建筑物點。然后借助大平面檢索、去噪聲、連通區域分析等分割技術完成預處理,選出小平面。這些小平面建筑物點、地面點和植被點等。再運用平整度將地面點和植被點小平面剔除。
Abstract: During the processing of Lidar points cloud of buildings,non-building points usually interfused. This article fused point cloud data with digital line to extract the building points roughly. And then with the help of segmentation, such as big planes detection, connected component analysis, small planes can be achieved which are building points, ground points and vegetation points. At last this article uses flatness to reject non-building points.
關鍵詞:激光雷達;數字線劃圖;建筑物點云;分割;剔除
Key words: Lidar;digital line graph;building points;segmentation;reject
中圖分類號:TN958.98 文獻標識碼:A 文章編號:1006-4311(2017)02-0031-03
0 引言
目前,眾多應用領域對城市建筑物三維模型都有較大的需求[1]。在大規模地形測繪中,Lidar近十年來漸漸成為主流方法。建筑物點屬于非地面點,點云濾波是Lidar數據處理的首要任務,主要目的是將點云分成地面點和非地面點[2]。依據濾波原理來分可以分為基于表面模型、基于坡度或斜率、基于分割三種[3]。當前濾波算法在處理地形不連續區域或存在復雜建筑物區域時容易過分腐蝕地形并難以去除一些低矮植被這是影響建筑物點精度的根本問題[4]。后續操作中建筑物點的提取方法有很多,但這些方法總是根據不同區域因地制宜進行提取,而且這些方法往往適用于無植被覆蓋的建筑物區域。由于機載雷達探測范圍為大面積城市區域,不論我們如何濾波、用何種方法提取建筑物,總會存在建筑物點的精度問題。經過分析這些非建筑物點往往是地面點和植被點。在建筑物點云分割時如何將地面點和植被點剔除是本文的研究內容。實驗區選取要求建筑物層次分明,整齊規則,適合新處理方法的實驗,一般為發達城市地區。本文研究區域中心位于荷蘭DenBosch附近。文中laser點云數據來自AHN2。AHN2是一個包含所有荷蘭詳細精確高程數據的文件。文中laser點的密度是每平方大約20個。數字線劃圖來自BGT(注冊大規模地形),它是統一包含了荷蘭所有地物的地形文件。
1 流程與原理
本文非建筑物點的剔除基于點云的分割完成。分割的本質就是將數據分割成若干個互不相交的子集,每一個子集中的數據同屬于一個具有單一特征的曲面。具體說來就是給同一個表面上的點賦予同一標記,不同表面的點賦予不同標記[5]。本文分割方法是基于面的分割,基于面的區域分割方法是具有相似性質的點集合起來構成區域。首先對每個需要分割的區域找出一個種子點作為生長的起點,然后將種子周圍鄰域與種子點相同或相似的點歸并到種子所在的區域中。而新的點繼續做種子向四周生長,直到再沒有滿足條件的點可以包括進來,一個區域也就生長而成了[6]。
1.1 數據預處理
本文首先對原始點云數據和數字線劃圖進行融合,目的在于對三維點云數據完成粗提取并添加建筑物屬性和多邊形ID屬性。數字線劃圖是由多邊形拓撲而成的二維數據[7],經過坐標轉換統一兩數據坐標然后實現數據融合。給所有建筑物多邊形賦予ID編碼和類別編碼,落入建筑物多邊形區域內的點認為是建筑物點,賦予點相對應的ID編碼和類別編碼。本文選擇用FME Workbench來實現數據融合。FME Workbench(Feature Manipulate Engine,簡稱FME)是加拿大Safe Software公司開發的空間數據轉換處理系統,它是完整的空間提取(extract)、轉換(transform)、加載(load)解決方案。首先通過濾波后的Lidar數據和放大的數字線劃圖進行融合處理,完成建筑物的粗提取。數字線劃圖與點云數據并不能很好的精確匹配,將數字線劃圖邊界擴大0.5米,將落入數字線劃圖建筑物多邊形區域的點暫時認為是建筑物點云。由于數字線劃圖的放大,會融入非建筑物點。數字線劃圖中的每個多邊形會包含多個物體,并且一個物體(如一棟建筑)不在多個多邊形內對于非地面點,我們逐個多邊形用曲面生長方法檢測大平面。此時多邊形為擴大邊界后的多邊形。大平面認定為屋頂和墻體,檢索到的大平面認為是建筑物點。將這些點賦予建筑物屬性編碼和多邊形ID編碼。
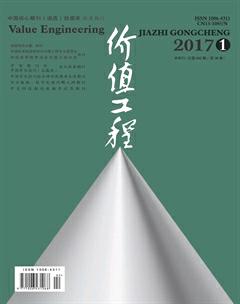
然后對非建筑物點進行去噪聲來剔除粗差點。將區域內未分割的點進行連通區域分析,得到一部分小平面,此小平面為墻體、地面點和植被點。連通區域(Connected Component)一般是指圖像中具有相同像素值且位置相鄰的前景像素點組成的圖像區域(Region,Blob)。連通區域分析(Connected Component Analysis)是指將圖像中的各個連通區域找出。對于這些小平面點,我們逐步計算每個點與鄰域內點協方差矩陣計算每個點鄰域平整度,設置平整度高低的閾值來判斷單點的平整度大小。然后小平面內設置平整度高低比例閾值來判斷該小平面是否平整。不平整的小平面我們認為是植被點,剔除之。平整小平面為地面點或建筑物點。人工選取初始點云中地面點樣本,計算出地面點的平均高程,比較剩余小平面的平均高程,若與地面點平均高程接近則判定該小平面為地面點,剔除之。流程圖如圖1所示。
1.2 非建筑物點的剔除
我們做地面點和植被剔除基于以下三個物理特征:
①植被為無規則平面。
②道路平滑又水平,平均高度與地面點平均高度相同。
③屋頂平面高于地面點。
設定單點平整度閾值t來判斷一個點在其鄰域k個點的平整度大小。若Fλ≥t則該點為平整度大的點;若Fλ 再設置一個閾值p來判定小平面內高平整度的點比例多少。若該小平面內高平整度點數大于等于p則判定該區域為光滑平整的面;若該小平面內高平整度的點小于p,則判定該平面不平整,屬與植被,剔除。此時我們還需要剔除地面點。 在初始樣本中人工選取地面樣本點a個,計算其平均高程Z樣本=。在剩余小平面內逐個計算其所有點平均高程Z平面,我們設置一個緩沖閾值Δh來表述兩個平均高程是否接近。值若Z樣本-Δh 此時完成了地面點和植被點的剔除。 2 實驗結果與分析 2.1 實驗結果 與數字線劃圖融合后的點云會包含如下幾個屬性。第一列到第三列分別為XYZ三維坐標,第四列表示地物類別表示為建筑物,第五列表示多邊形ID。點云融合后的數據如圖2所示。 由于存在誤差和形變,數字線劃圖往往不能與點云數據完美匹配,這會造成一些建筑物點云散落在建筑物多邊形外,試驗中將多邊形的邊界擴大一個值r=0.5米。圖中紅色點為建筑物點。圖3為初始融合的效果圖,圖4為多邊形邊界擴大后的效果圖。 為了分割得到屋頂和部分墻體,做大平面檢索。大平面檢索后對于剩余的非地面點去噪聲。選取一定半徑對每個點進行搜索,認定相鄰點數少于特定值的點為噪聲點。把噪聲去除后通過連通性逐個多邊形進行檢索。連通區域分析的參數和去噪聲參數同樣根據點密度和實景確定。這個過程會得到一部分屋頂小平面、一些墻體和一些地面點和植被,需要將地面點和植被剔除。結果和參數如圖5和表1所示。 通過連通區分析和平整度計算,我們又可以得到一部分建筑物點,賦予建筑物屬性編碼和多邊形ID編碼。聯通區域分析效果圖和參數設置如圖6和表2所示。 2.2 實驗分析 圖3是初始點云與數字線劃圖融合結果,建筑物輪廓基本得到,但是空中懸浮的藍色點并未識別,根據經驗其也應為建筑物點。將建筑物多邊形擴大得到圖4,在多邊形邊界擴張之后,空中懸浮點基本被建筑物點侵蝕,但地面藍色點也有一部分被圈入了建筑物。大平面檢索之后幾乎全得到了屋頂,以及得到部分墻體。但是有圖5可看出建筑物底部存在地面點的混入。圖6已經做了平整度計算,我們看到,在圖5的基礎上,經過去噪和連通區域分析后大平面被分割的更加細致,表現在單一顏色大平面被幾種色彩所代替。但是由于圖6又做了道路和植被的剔除,圖5中建筑物底部過度侵蝕的地面點有所減少。本次基于分割的非建筑物點云剔除有所成效。 參考文獻: [1]張志超.融合機載與地面LIDAR數據的建筑物三維重建研究[D].武漢大學,2010. [2]余潔,張國寧,秦昆,楊海全.LIDAR數據的過濾方法探討[J].地理空間信息,2006(04):8-10. [3]周曉明.機載激光雷達點云數據濾波算法的研究與應用[D].解放軍信息工程大學,2011. [4]胡舉,楊遼,沈金祥,吳小波.一種基于分割的機載Lidar點云數據濾波[J].武漢大學學報(信息科學版),2012,03:318-321. [5]歐新良,,匡小蘭,倪問尹.三維散亂點云分割技術綜述[J].湖南工業大學學報.2010,24(5). [6]胡懷宇,崔漢國,代星.基于區域生長法的散亂點云分區方法[J].計算機應用,2009,29(10):2716-2718. [7]石磊.數字線劃圖三維編輯技術的研究與應用[D].解放軍信息工程大學,2009. [8]李杰,程效軍.三維激光掃描儀在墻面平整度檢測中的應用[J].井岡山大學學報(自然科學版),2014(04):13-17.