基于GPS授時(shí)的電網(wǎng)頻率測(cè)量技術(shù)的研究
2017-01-20 09:55:44潘宇婷陳宇晨王承宇
電源技術(shù) 2016年3期
關(guān)鍵詞:信號(hào)
潘宇婷, 陳宇晨, 王承宇, 侯 昀
(1.上海工程技術(shù)大學(xué),上海201620;2.上海市電力公司,上海200122)
基于GPS授時(shí)的電網(wǎng)頻率測(cè)量技術(shù)的研究
潘宇婷1, 陳宇晨1, 王承宇1, 侯 昀2
(1.上海工程技術(shù)大學(xué),上海201620;2.上海市電力公司,上海200122)
提出了一種基于GPS授時(shí)的電網(wǎng)頻率測(cè)量的新方法,系統(tǒng)以GPS接收機(jī)提供的1PPS信號(hào)為基準(zhǔn)源,結(jié)合GPS時(shí)鐘信號(hào)和恒溫晶振時(shí)鐘信號(hào)精度互補(bǔ)這一特性,通過(guò)調(diào)控恒溫晶振的壓控端,使其輸出頻率隨之改變,以維持短期和長(zhǎng)期的時(shí)鐘精度和穩(wěn)定性。然后將此時(shí)鐘提供給DSP的定時(shí)器,通過(guò)DSP的eCAP模塊對(duì)輸入信號(hào)的上升沿進(jìn)行捕獲,記錄兩個(gè)上升沿的觸發(fā)時(shí)間得到電網(wǎng)的實(shí)時(shí)頻率。
GPS授時(shí);恒溫晶振;粒子濾波;捕捉單元
當(dāng)代社會(huì),電能是一種最為廣泛使用的能源,其應(yīng)用程度成為一個(gè)國(guó)家發(fā)展水平的主要標(biāo)志之一。隨著科學(xué)技術(shù)和國(guó)民經(jīng)濟(jì)的發(fā)展,對(duì)電能的需求量日益增加,同時(shí)對(duì)電能質(zhì)量的要求也越來(lái)越高。電網(wǎng)頻率是電能質(zhì)量的一項(xiàng)重要指標(biāo),電能質(zhì)量的好壞直接影響工農(nóng)業(yè)生產(chǎn)和人民的生活,因此保證電網(wǎng)頻率偏差小于容許值是電網(wǎng)運(yùn)行調(diào)節(jié)控制的重要內(nèi)容[1]。
1 系統(tǒng)總體框架結(jié)構(gòu)
系統(tǒng)由調(diào)理電路、過(guò)零檢測(cè)電路、外部恒溫晶振校準(zhǔn)模塊組成,主框架如圖1所示。
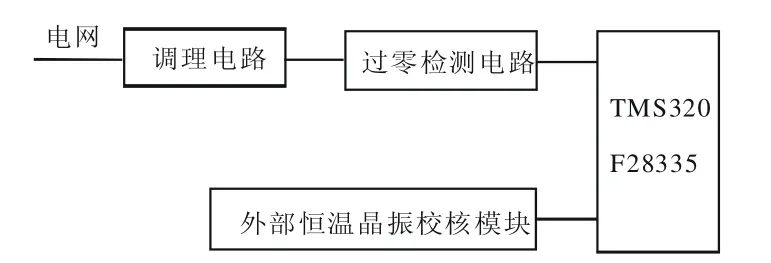
圖1 系統(tǒng)主框架圖
電網(wǎng)高壓經(jīng)過(guò)精密互感器變?yōu)樾⌒盘?hào),通過(guò)調(diào)理電路(放大電路、濾波電路等)進(jìn)行處理,以濾除高次諧波,避免諧波對(duì)過(guò)零檢測(cè)環(huán)節(jié)的影響,從而提高測(cè)量精度。過(guò)零檢測(cè)電路由電壓比較器MAX474、電阻和電阻元件等組成,對(duì)電網(wǎng)的正弦波進(jìn)行整形,從而可以得到與電網(wǎng)基波相同頻率的方波信號(hào),然后輸入到DSP的捕捉單元引腳。外部恒溫晶振校準(zhǔn)模塊通過(guò)GPS校核恒溫晶振,得到高精度的時(shí)鐘信號(hào),然后作為DSP定時(shí)器的外部輸入時(shí)鐘。
2 GPS校準(zhǔn)晶振的原理及算法研究
2.1 系統(tǒng)原理
由于受到跟蹤的衛(wèi)星數(shù)目、衛(wèi)星鐘差、傳導(dǎo)距離、電磁干擾和接收機(jī)性能等因素影響,GPS接收機(jī)輸出的1PPS信號(hào)存在一定的隨機(jī)誤差ε,ε服從正態(tài)分布ε~(0,σ2),但是沒(méi)有累計(jì)誤差。而恒溫晶振時(shí)鐘信號(hào)的隨機(jī)誤差較小,不過(guò)由于器件老化、短期擾動(dòng)和外界環(huán)境等一些因素的影響,存在頻率漂移現(xiàn)象,具有較大的累計(jì)誤差。如果恒溫晶振長(zhǎng)期不間斷的運(yùn)行,頻率將無(wú)法滿(mǎn)足工作所需的精度與穩(wěn)定度,因此需要通過(guò)實(shí)時(shí)的自動(dòng)調(diào)控壓控端電壓來(lái)進(jìn)行頻率校準(zhǔn)。根據(jù)GPS時(shí)鐘信號(hào)和恒溫晶振時(shí)鐘信號(hào)精度互補(bǔ)這一特性,通過(guò)調(diào)控恒溫晶振的壓控端,使其輸出頻率隨之改變,以維持短期和長(zhǎng)期的時(shí)間精度和穩(wěn)定性[2]。
根據(jù)系統(tǒng)需要,提出系統(tǒng)的總體設(shè)計(jì)方案,整個(gè)系統(tǒng)由GPS接收機(jī)模塊、時(shí)間間隔測(cè)量模塊、數(shù)據(jù)處理模塊、時(shí)鐘管理分頻模塊、恒溫晶振、DAC和信號(hào)調(diào)理電路組成。圖2為恒溫晶振校核原理圖。
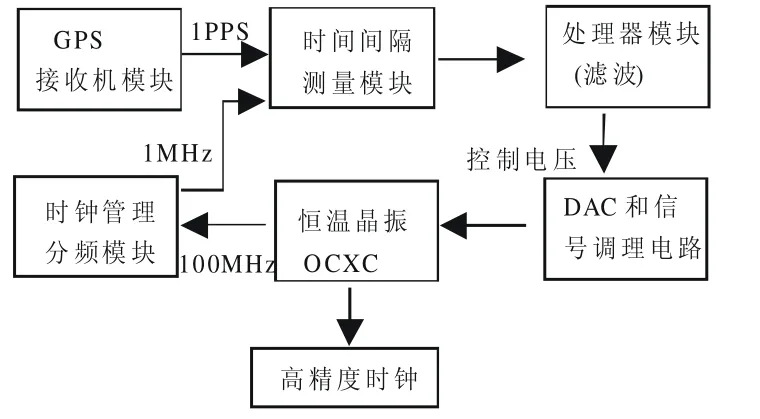
圖2 恒溫晶振校核原理圖
GPS接收機(jī)模塊:接收GPS信號(hào),產(chǎn)生同步于UTC并與之有一定隨機(jī)誤差的1 PPS信號(hào),經(jīng)過(guò)處理后作為恒溫晶振校準(zhǔn)的參考標(biāo)準(zhǔn)。
時(shí)間間隔測(cè)量模塊:對(duì)GPS接收模塊輸出的1PPS信號(hào)和OCXO輸出的分頻1 Hz信號(hào)的上升沿的時(shí)間間隔進(jìn)行精密測(cè)量,并把測(cè)量結(jié)果傳送給處理器模塊。
處理器模塊(DSP):為了消除1 PPS信號(hào)的抖動(dòng),DSP對(duì)接收到的時(shí)間間隔測(cè)量模塊送來(lái)的數(shù)據(jù)進(jìn)行一定周期的采樣,并運(yùn)用粒子濾波算法對(duì)其進(jìn)行數(shù)字濾波。可在控制器中設(shè)置采樣周期,可取50,100等。可測(cè)得兩次時(shí)間間隔為和,相位差為,用比時(shí)法測(cè)得頻率差[3]。

DAC信號(hào)調(diào)理電路:將處理器輸出的數(shù)字信號(hào)轉(zhuǎn)化為模擬信號(hào),并經(jīng)過(guò)調(diào)理電路變換到恒溫晶振電壓控制端可接收的電壓范圍內(nèi),從而實(shí)現(xiàn)對(duì)恒溫晶振輸出頻率的調(diào)整。
時(shí)鐘管理分頻模塊:對(duì)經(jīng)過(guò)校準(zhǔn)后的信號(hào)進(jìn)行分頻,產(chǎn)生1 Hz信號(hào)。
恒溫晶振:產(chǎn)生原始頻率信號(hào),經(jīng)過(guò)校準(zhǔn)后輸出高精度時(shí)鐘信號(hào)。
2.2 粒子濾波算法的研究
恒溫晶振由于器件老化、短期擾動(dòng)和外界環(huán)境等一些因素的影響,存在頻率漂移現(xiàn)象,具有較大的累計(jì)誤差。以前的研究大多認(rèn)為晶振漂移服從多項(xiàng)式模型,從而假設(shè)晶振衰老率為線(xiàn)性,利用卡爾曼濾波可以得到解析形式的跟蹤算法。但是現(xiàn)實(shí)中晶振衰老率并非常數(shù),或者受到擾動(dòng)在常數(shù)附近變化。本文中基于晶振對(duì)數(shù)衰老速率模型建立了非線(xiàn)性的晶振時(shí)鐘漂移模型,利用了GPS信號(hào)與晶振信號(hào)互補(bǔ)特征,提出了一種新的基于粒子濾波的時(shí)鐘誤差實(shí)時(shí)估計(jì)和補(bǔ)償算法,從而得到高精度的時(shí)鐘信號(hào)。



將本地晶振時(shí)鐘較好的短期穩(wěn)定性與GPS時(shí)鐘長(zhǎng)期穩(wěn)定性結(jié)合起來(lái),通過(guò)測(cè)量并估計(jì),就可以對(duì)恒溫晶振進(jìn)行補(bǔ)償,從而得到精確的時(shí)鐘。
理想中的時(shí)鐘頻率為常數(shù),但是現(xiàn)實(shí)中的真實(shí)時(shí)鐘頻率會(huì)隨著電壓、環(huán)境等因素的變化而變化。文獻(xiàn)經(jīng)過(guò)大量的測(cè)量表明晶振的漂移用對(duì)數(shù)衰老模型描述更為準(zhǔn)確。根據(jù)時(shí)鐘頻率漂移的不同假設(shè)并結(jié)合現(xiàn)有的研究,文中我們假設(shè)其為對(duì)數(shù)衰老模型[4]。
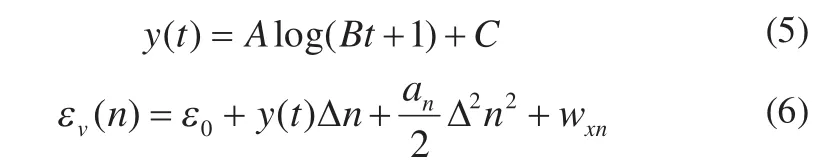
結(jié)合式(5)與(6)可以得到對(duì)數(shù)衰老模型下的時(shí)間間隔誤差模型為:

為了得到準(zhǔn)確的對(duì)數(shù)衰老模型,參數(shù)A、B、C需要經(jīng)過(guò)長(zhǎng)時(shí)間的觀測(cè)擬合。對(duì)式(7)做進(jìn)一步變化可以得到:

圖3是粒子算法的流程圖。
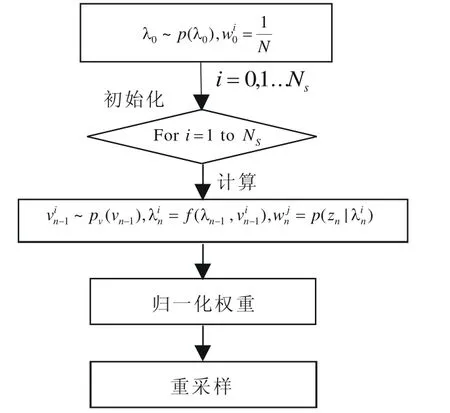
圖3 粒子算法流程圖
為了將粒子算法與傳統(tǒng)的算法性能進(jìn)行比較,在Matlab環(huán)境下,對(duì)卡爾曼濾波算法、加權(quán)平均濾波算法和粒子濾波算法都進(jìn)行了仿真。其中取采樣時(shí)間間隔:fffb3e=180 s,根據(jù)數(shù)據(jù)擬合產(chǎn)生A、B、C的初始值,fffb3d服從正態(tài)分布,在仿真中可取。圖4為仿真圖,由圖4可知,粒子濾波大大減少了晶振時(shí)鐘的誤差。
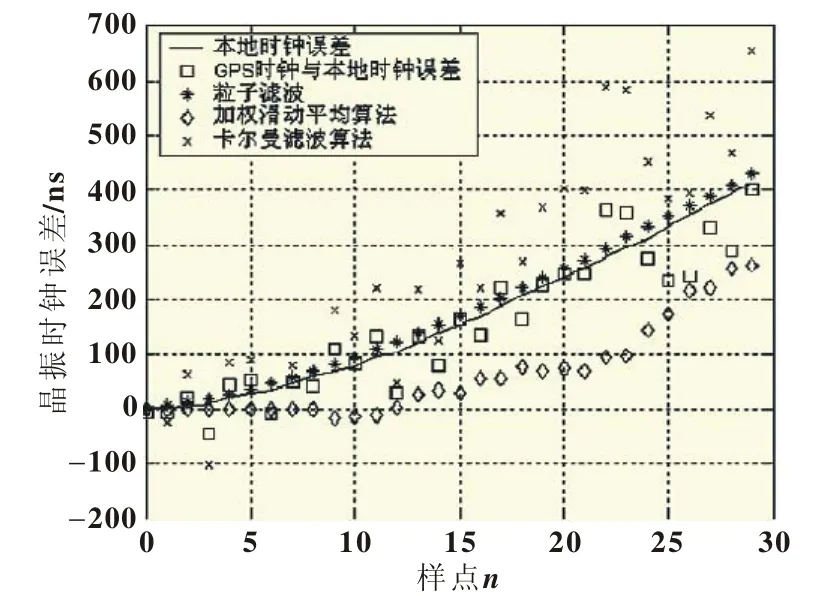
圖4 三種不同算法下的仿真圖
3 電網(wǎng)頻率測(cè)量在DSP中的實(shí)現(xiàn)
電網(wǎng)高電壓經(jīng)過(guò)調(diào)理電路、過(guò)零檢測(cè)電路變?yōu)橥椒讲ㄐ盘?hào),利用TMS320F28335的eCAP1模塊對(duì)方波的上升沿進(jìn)行捕捉,利用經(jīng)過(guò)GPS校核后恒溫晶振作為定時(shí)器的外部晶振輸入,每次捕捉完成后對(duì)32位的定時(shí)器進(jìn)行置位,其值為。則可以得到(外部恒溫晶振頻率)和與電網(wǎng)頻率之間的關(guān)系,即:


圖5 捕捉過(guò)程流程圖
4 結(jié)束語(yǔ)
本文提出的基于GPS時(shí)鐘信號(hào)校準(zhǔn)恒溫晶振輸出頻率,并利用粒子濾波算法對(duì)觀測(cè)值進(jìn)行處理,消除擾動(dòng)帶來(lái)的誤差,最后經(jīng)過(guò)相關(guān)電路對(duì)恒溫晶振進(jìn)行補(bǔ)償。得到的精確時(shí)鐘作為定時(shí)器的外部輸入時(shí)鐘,利用精準(zhǔn)的時(shí)鐘對(duì)捕捉信號(hào)進(jìn)行計(jì)數(shù),從而得到準(zhǔn)確實(shí)時(shí)的電網(wǎng)頻率。該方法實(shí)時(shí)性好,精度高,必將在電能質(zhì)量檢測(cè)裝置和新能源設(shè)備并網(wǎng)中得到更加廣泛的應(yīng)用[5-10]。
[1]劉維烈.電力系統(tǒng)調(diào)頻與自動(dòng)發(fā)電控制[M].北京:中國(guó)電力出版社,2006:43-84.
[2]GUO F.Research of techniques to lock high frequency oscillator based on PPS[J].Journal of Time and Frequency,2004,12(27):94-101.
[3]周渭,偶曉娟,周暉,等.時(shí)頻測(cè)控技術(shù)[M].西安:西安電子科技大學(xué)出版社,2006:40-49,56-65,151-159.
[4]于宏毅,李歐,張效義,等.無(wú)線(xiàn)傳感器網(wǎng)絡(luò)原理、技術(shù)與應(yīng)用[M].北京:國(guó)防工業(yè)出版社,2008.
[5]林勇.基于GPS電能質(zhì)量在線(xiàn)監(jiān)測(cè)器的設(shè)計(jì)與實(shí)現(xiàn)[D].合肥:安徽大學(xué),2010.
[6]宋越明.基于粒子濾波的跟蹤方法研究[D].鄭州:解放軍信息工程大學(xué),2010.
[7]馬彥青.恒溫晶振OCXO自適應(yīng)馴服保持技術(shù)研究[D].西安:西安電子科技大學(xué),2011.
[8]宋越明,于宏毅.采用概率密度分布和粒子濾波的室內(nèi)定位跟蹤算法[J].計(jì)算機(jī)工程與應(yīng)用,2010,46(1):237-240.
[9]許國(guó)宏,李鐵成,李星.基于GPS馴服技術(shù)的高穩(wěn)頻蹤設(shè)計(jì)[J].電子設(shè)計(jì)工程,2010,18(4):63-65.
[10]杜文建.GPS與恒溫晶振互補(bǔ)的高穩(wěn)定時(shí)鐘研究[D].南京:南京大學(xué),2012.
Grid frequency measurement research based on GPS timing

A new method of frequency measurement based on GPS timing grid was proposed.The 1 PPS signal source received from GPS was taken as datum fountain.Combined with the accuracy complementary feature of GPS clock signal and OCXO clock signal,through regulating the voltage-controlled of OCXO,output frequency change and maintaining clock short-term and long-term accuracy and stability were made.Then this clock would provide to DSP timer.Through eCAP module of DSP to capture the rise of input signal,the grid real-time frequency could be got by recording the triggering time of the two rising along.
GPS timing;OCXO;particle filter;capture unit
TM 93
A
1002-087 X(2016)03-0709-02
2015-08-26
國(guó)家自然科學(xué)基金項(xiàng)目(51177099);上海市科委基金(10160501700)
潘宇婷(1990—),女,安徽省人,碩士生,主要研究方向?yàn)橥较嗔繙y(cè)量與電力系統(tǒng)分析。
陳宇晨,E-mail:yuchen1957@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
