基于新型滑模觀測器的永磁直驅風機控制
2017-01-20 09:55:26朱明東黃科元黃守道
電源技術 2016年3期
朱明東,黃科元,黃守道,郭 興
(湖南大學電氣與信息工程學院,湖南長沙410082)
基于新型滑模觀測器的永磁直驅風機控制
朱明東,黃科元,黃守道,郭 興
(湖南大學電氣與信息工程學院,湖南長沙410082)
針對永磁同步電機高速運行的無傳感器控制,結合滑模觀測器對電機參數變化和測量具有很強魯棒性且響應迅速的優點,引入連續的飽和函數,設計了防高頻抖動的新型滑模觀測器,并詳細分析了基于轉子磁場定向的矢量控制策略,建立了基于新型滑模觀測器的永磁直驅風力發電機的無速度傳感器矢量控制模型,并進行實驗驗證。實驗結果表明,該控制系統不僅能準確估算風機轉子的角度和位置信息,實現高性能的無傳感器矢量控制,而且能夠實現有功、無功功率的獨立調節,具有良好的動靜態性能。
滑模觀測器;飽和函數;永磁直驅風力發電機;矢量控制
大功率永磁直驅風電系統是目前最具實用前景的風電系統之一。與雙饋感應風電系統相比,永磁直驅風電系統具有發電效率高、可靠性高、省去了變速箱、運行及維護成本低以及更優的低電壓穿越能力等優點,因而成為研究熱點[1]。
高性能的永磁同步發電機(PMSG)矢量控制需要準確的電機轉子角度和位置信息,傳統的方法是在轉子軸上安裝傳感器,但是這樣會降低系統的可靠性,提高系統成本。為解決機械傳感器給系統帶來的不便,無傳感器控制方法越來越受到人們的重視,應用滑模觀測器進行速度估算就是其中一種[2-5]。滑模觀測器與控制對象的參數變化以及擾動無關,具有很強的魯棒性且響應迅速,因此適合對風速不穩,發電不連續,且運行在環境惡劣的野外或者海上的風電系統進行速度估算。
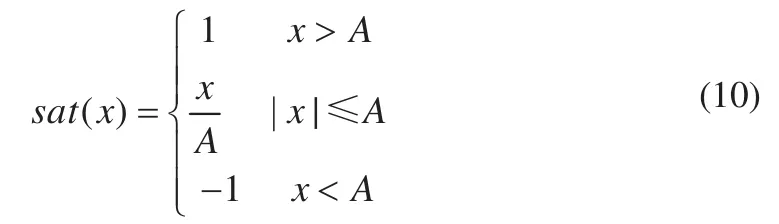
由于風電系統具有一定的切入轉速,因此不需要進行無速度傳感器最難實現的初始定位和低速估算。但是傳統的滑模觀測器在本質上是不連續的開關控制,會引起系統發生抖動,本文設計了一種新型滑模觀測器,采用連續的飽和函數代替不連續的開關函數,有效地抑制了滑模控制所產生的抖振現象[6-7]。結合永磁直驅風電系統的特點,本文建立了基于新型滑模觀測器的永磁直驅風力發電機轉子磁場定向的矢量控制系統模型,實現了永磁風力發電機的無速度傳感器控制。通過實驗進行驗證,證實了該控制策略的可行性和有效性。
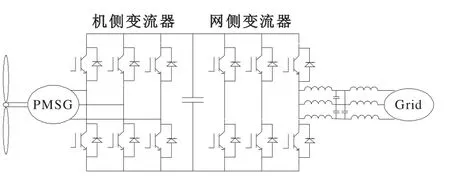
圖1 永磁直驅風電系統結構圖
1 永磁直驅風力發電機控制策略
永磁直驅風電系統的典型拓撲結構如圖1所示。系統主要包括永磁同步發電機、機側變流器、穩壓大電容、網側變流器以及LCL濾波裝置。
該系統變流器采用背靠背(back to back)雙脈寬調制結構,與采用不可控整流的永磁直驅風電系統相比,該系統通過控制電機側變流器可減小發電機定子電流的諧波,減小電機損耗和轉矩脈動,并提高系統的動態響應速度,而且能夠靈活實現發電機的起動和制動等功能。
轉矩方程為:

為了滿足變速恒頻風電系統的控制要求,發電機轉速必須快速響應風速的變化,實現風能利用最大功率點的跟蹤,這就要求永磁同步發電機輸出功率的同時,還要具備良好的機械特性,因此,不論是凸極還是隱極發電機,=0控制下的永磁同步發電機都能夠很好地滿足風力發電系統對轉速控制性能的要求。在這種控制方式下,轉矩方程可以轉化為式(3):

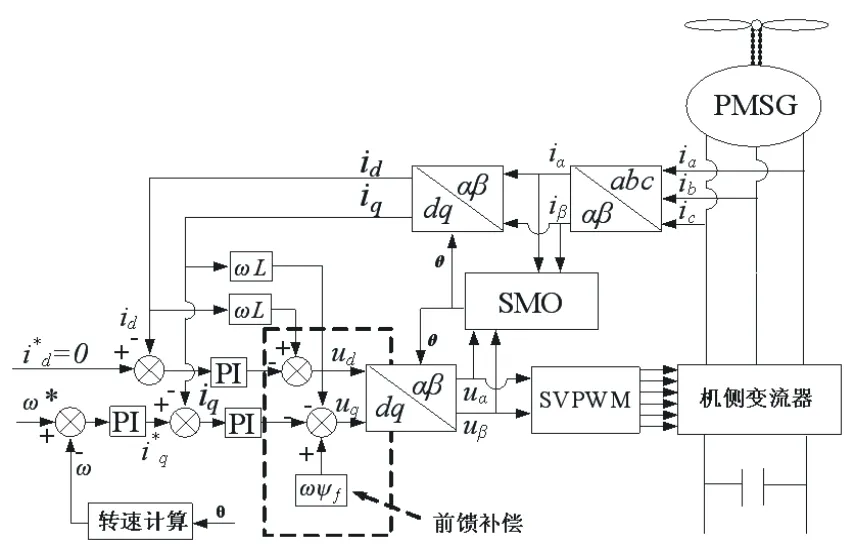
圖2 電機側變流器控制框圖
2 基于滑模觀測器的位置估測
2.1 滑模觀測器原理
滑模觀測器的實質是狀態重構,其原理是重新構造一個系統,利用原系統可直接測量的變量作為輸入信號,并使其輸出信號在一定條件下等于原系統的狀態。其原理框圖如圖3所示。
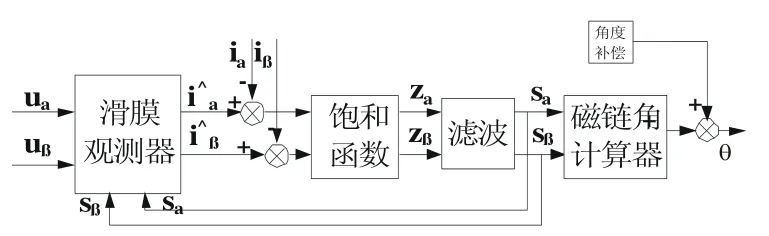
圖3 滑模觀測器原理框圖
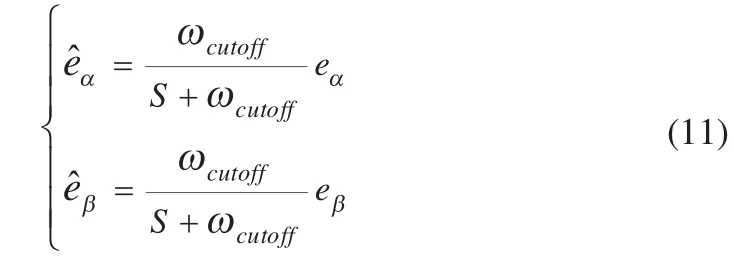
傳統的滑模觀測器本質上是在位置觀測時利用結構變換開關,以很高的頻率來回切換,快速修正反電勢,使估算電流和實際電流相等,從而獲取電機的轉子位置和轉速值。但由于本質上是不連續的開關控制,當系統進入穩態后,狀態變量進行高速滑模切換時就會存在高頻抖動。抖動是滑模控制系統的最大缺點,抖動的存在會降低控制系統的精度,影響控制系統的動態性能,嚴重的還會影響到控制系統的穩定性[9-10]。為了消除滑模觀測器中的高頻抖動,永磁電機的最優控制主要采用的是砰-砰綜合控制形式,在原來依據電機方程直接計算位置的基礎上增加了一個校正環節,快速修正參數變化和測量產生的誤差,最終達到穩定點。
2.2 新型滑模觀測器設計
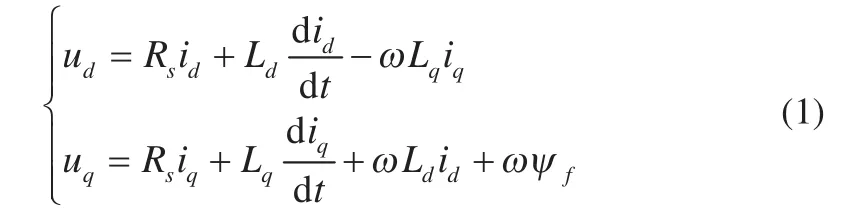
面貼式永磁同步電機在α-β坐標系中的數學模型為:
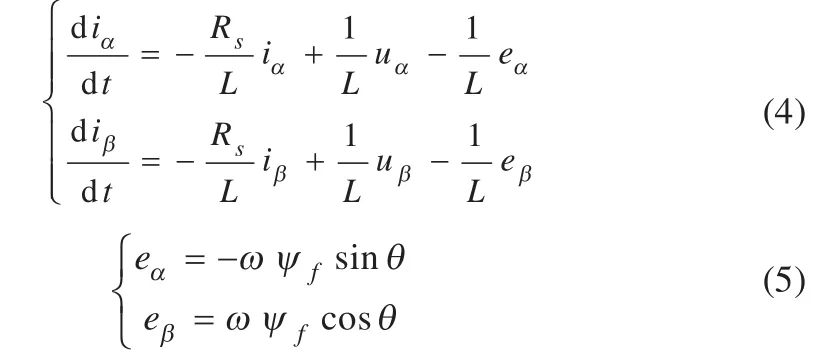
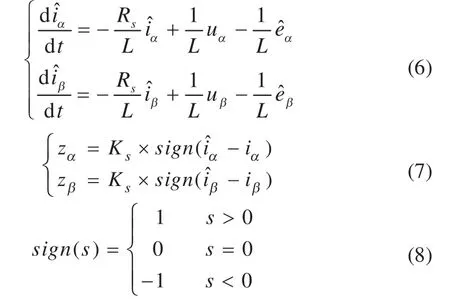
根據永磁同步電機的數學模型,構造滑模觀測器如式(6):


根據圖4滑模的電壓矢量參考坐標系計算可知,補償后的估算角公式應為:

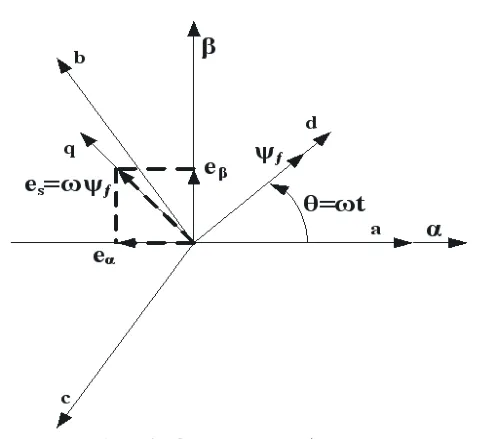
圖4 滑模的電壓矢量參考坐標系
3 實驗驗證
為了驗證基于新型滑模觀測器的無速度傳感器方法在永磁直驅風電系統中的可行性,在永磁直驅風電系統模擬平臺上進行了實驗驗證(圖5)。實驗以TMS320F2808作為主控芯片,永磁同步發電機為一臺7.5 kW,額定電壓380 V,額定電流17 A的4極電機。用一臺7.5 kW的直流電動機模擬風機,電機的額定電樞電壓和額定電樞電流分別為440 V和19 A,額定轉速為2 980 r/min。雙PWM變流器分別連接電網和永磁同步發電機,直流母線電壓為650 V,逆變器每相額定輸出電流為15 A。模擬平臺控制系統結構圖如圖6,模擬系統的實驗波形如圖7。

圖5 直驅型風力發電系統模擬實驗平臺
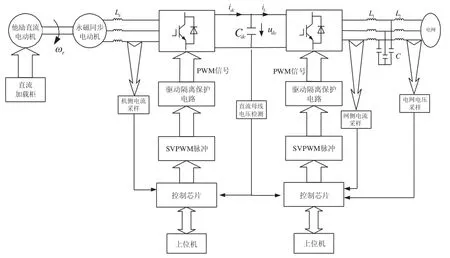
圖6 控制系統結構圖
從圖7(a)可以看出,滑模觀測器估測出的角度非常準確,相位無偏移。圖7(b)表示當發電機轉速從1 000 r/min降到500 r/min的動態過程中,滑模觀測器響應迅速,估測出的轉速和角度準確,基本無波動,具有很好的動態性能。
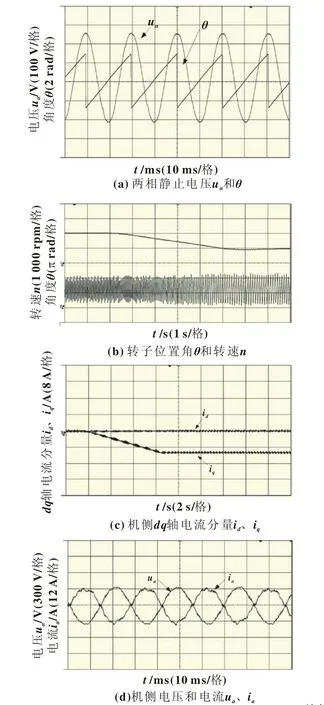
流以及網側電壓和電流,圖中電流的正弦度好,說明系統有良好的電流控制效果。
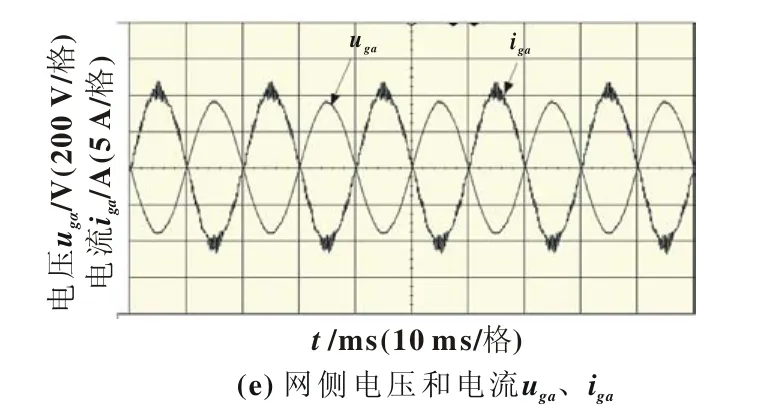
圖7 永磁直驅風電模擬系統實驗波形
4 結論
為了獲得準確的轉子角度和位置信息,克服傳統滑模觀測器高頻抖動的缺陷,本文設計了一種新型滑模觀測器,增加了校正環節以快速修正參數變化和測量誤差,建立了基于新型滑模觀測器的永磁直驅風力發電機的無速度傳感器矢量控制模型。通過實驗結果可以看出:基于新型滑模觀測器的無速度傳感器控制方法估算的角度準確,電流、電壓控制效果良好,響應迅速;永磁直驅風力發電機控制系統的動態、靜態性能良好。
[1]YANG S Y,ZHANG X,ZHANG C W,et al.Sensorless control for PMSG in direct-drive wind turbines[C]//International Symposium on Power Electronics for Distributed Generation Systems.Hefei, China:IEEE,2010:81-84.
[2]FAN S W,WANG P,WEN C X.A new sensorless control strategy used in direct-drive PMSG wind power system[C]//International Symposium on Power Electronics for Distributed Generation Systems.Hefei,China:IEEE,2010:611-615.
[3]王劍飛,胡書舉,趙棟利,等.永磁直驅型風力發電機的無傳感器控制[J].電機與控制應用,2009,36(6):21-25.
[4]HALKOSAARI T.Speed sensorless vector control of a redundant permanent magnet wind power generator[C]//International Symposium on Industrial Electronics.Vigo,Spain:IEEE,2007:2595-2600.
[5]易映萍,劉普,吳金龍.永磁直驅風力發電機無傳感器矢量控制研究[J].電氣傳動,2011,41(4):12-15.
[6]趙仁德,劉星,馬帥,等.直驅永磁同步風力發電機無位置傳感器控制[J].電機與控制學報,2010,14(7):13-17.
[7]ILIOUDIS V C,MARGARIS N I.PMSM sensorless speed estimation based on sliding mode observers[C]//Power Electronics Specialists Conference.Rhodes,Greece:IEEE,2008:2838-2843.
[8]黃飛,皮佑國.基于滑模觀測器的永磁同步電機無位置傳感器控制的研究[J].計算技術與自動化,2009,28(2):32-36.
[9]PAPONPEN K,KONGHIRUN M.An improved sliding mode observer for speed sensorless vector control drive of PMSM[C]// Power Electronics and Motion Control Conference.Shanghai,China:IEEE,2006:1-5.
[10]LIU J X,YANG G J,LI T C.A new approach to estimated rotor position for PMSM based on sliding mode observer[C]//International Conference on Electrical Machines and Systems.Seoul, Korea:IEEE,2007:426-431.
Research of control method of permanent magnet direct-drive wind generator based on new sliding mode observer

Combined with the advantage that sliding mode observer had a strong robustness to motor parameter variations and measurement, a new type of sliding mode observer was designed for sensorless control for high-speed operation of permanent magnet synchronous motor.To avoid the high-frequency jitter, continuous saturation function was introduced.And a strategy which based on rotor field oriented vector control was analyzed in detail,a new sliding mode observer-based sensorless vector control model for permanent magnet direct-drive wind generator was established.Finally,it conducted the experimental verification.The experimental results show that the control system is not only able to accurately estimate the rotor angle and position information of wind generator to achieve high performance sensorless vector control,but also capable of achieving active and reactive power adjusted independently,acquiring a good dynamic and static performance.
sliding mode observer;saturation function;permanent magnet direct-drive wind generator;vector control
TM315
A
1002-087 X(2016)03-0672-03
2015-08-26
國家自然科學基金(50907020);教育部高等學校博士學科點專項科研基金 (200805321038);湖南省博士創新基金(CX2010B149)
朱明東(1989—),男,河南省人,碩士生,主要研究方向為風力發電與電機控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
