基于STM32的風(fēng)力擺控制系統(tǒng)的設(shè)計(jì)
2017-01-13 09:34:32黃一珀丁斌董楊潘嘉睿
中國新通信 2016年22期
黃一珀+丁斌+董楊+潘嘉睿
【摘要】 該風(fēng)力擺控制系統(tǒng)是由單片機(jī)控制核心、ADXL345 數(shù)字三軸重力加速度芯片、直流電機(jī)、電機(jī)驅(qū)動(dòng)模塊以及液晶顯示模塊幾個(gè)部分構(gòu)成的閉環(huán)系統(tǒng)。利用單片機(jī)產(chǎn)生不同占空比的PWM波給驅(qū)動(dòng)模塊讓其產(chǎn)生正弦波驅(qū)動(dòng)為電機(jī)提供工作電壓,運(yùn)用相位合成和占空比調(diào)節(jié)實(shí)現(xiàn)對風(fēng)力擺的運(yùn)動(dòng)軌跡控制,通過實(shí)際數(shù)據(jù)試驗(yàn)出風(fēng)力擺的控制規(guī)律,穩(wěn)定的完成了風(fēng)力擺的直線運(yùn)動(dòng)和曲線運(yùn)動(dòng)要求。
【關(guān)鍵詞】 正弦波 角度傳感器 直流電機(jī)
一、設(shè)計(jì)方案及原理分析
本系統(tǒng)由機(jī)械結(jié)構(gòu)、控制模塊、電機(jī)驅(qū)動(dòng)模塊、擺桿角度測量模塊、電機(jī)和電源等組成,下面分別論證一下幾個(gè)模塊的選擇。
1.1機(jī)械結(jié)構(gòu)的設(shè)計(jì)方案
風(fēng)力擺控制系統(tǒng)是一個(gè)完整的測量控制系統(tǒng),其中的機(jī)械結(jié)構(gòu)則是這個(gè)測控系統(tǒng)的對象,對象的好壞在很大程度上會(huì)影響到后期控制算法的設(shè)計(jì),對象制作的越穩(wěn)定可靠,系統(tǒng)的性能就會(huì)越好。所以在制作這樣一個(gè)精密控制系統(tǒng)的時(shí)候,前期的機(jī)械結(jié)構(gòu)的制作是非常關(guān)鍵的一步,在制作的時(shí)候要盡量確保它的穩(wěn)定性,例如選用合適的材料、采用盡量好的制作工藝等。該風(fēng)力擺控制系統(tǒng)中,機(jī)械結(jié)構(gòu)大概分成以下幾部分,風(fēng)機(jī)、擺桿、擺桿轉(zhuǎn)軸、底座和激光筆。
1.2控制模塊方案
采用STM32F103單片機(jī)作為主控芯片。STM32F103基于高性能、低成本、低功耗的嵌入式應(yīng)用專門設(shè)計(jì)的ARM Cortex—M3內(nèi)核,強(qiáng)大的定時(shí)、中斷功能,方便對傳感器模塊和電機(jī)的控制,可以快速進(jìn)行復(fù)雜的運(yùn)算。同時(shí)具有大容量的RAM和ROM,可存儲(chǔ)大容量的程序。編程時(shí)可以直接調(diào)用庫函數(shù),提高編程效率。能夠較為迅速的從傳感器中采集數(shù)據(jù)進(jìn)行處理,并快速反饋給電機(jī)進(jìn)行下一步動(dòng)作。
1.3電機(jī)驅(qū)動(dòng)模塊方案
采用L298N驅(qū)動(dòng)。L298N是一種全橋驅(qū)動(dòng)芯片,它響應(yīng)頻率高,一片L298N可以分別控制兩個(gè)直流電機(jī),而且還帶有控制使能端。用該芯片作為電機(jī)驅(qū)動(dòng),操作方便,結(jié)合單片機(jī)可實(shí)現(xiàn)對電機(jī)速度的精確控制,調(diào)速特性優(yōu)良、調(diào)整平滑、調(diào)速范圍廣、過載能力大,能承受頻率的負(fù)載沖擊,還可以實(shí)現(xiàn)頻率的無級快速啟動(dòng)、制動(dòng)和反轉(zhuǎn)。
1.4擺桿角度測量模塊方案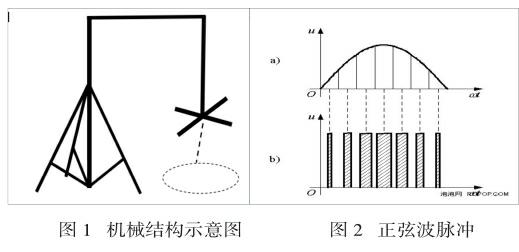
采用加速度傳感器模塊ADXL345。該傳感器具有體積小、重量輕、功耗低、分辨率高等優(yōu)點(diǎn),能夠檢測不到1°的傾角變化,并且具有很高的可靠性。這十分有利于對角度的取樣和對風(fēng)力擺的控制。
1.5電機(jī)的選取方案
采用直流電機(jī)。直流電機(jī)啟動(dòng)轉(zhuǎn)矩大,調(diào)速性能好,體積小,重量輕,裝配簡單,使用方便,通過單片機(jī)輸出PWM波很容易實(shí)現(xiàn)對直流電機(jī)正轉(zhuǎn),反轉(zhuǎn)和停止等操作。
1.6電機(jī)工作方式的選取方案
采用正弦波的工作方式。采用正弦波給電機(jī)供電,通過調(diào)節(jié)幅值來控制電機(jī)轉(zhuǎn)速,讓兩個(gè)方向都以正弦波運(yùn)動(dòng),合成后運(yùn)動(dòng)軌跡更接近圓,且容易控制和調(diào)節(jié)。
二、系統(tǒng)實(shí)現(xiàn)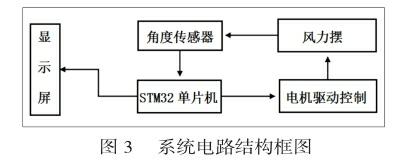
系統(tǒng)運(yùn)行時(shí),在液晶上顯示界面,用戶通過按鍵模塊進(jìn)入對應(yīng)的模式來完成相應(yīng)的功能。而后控制器讀取角度傳感器的數(shù)值,整合計(jì)算后發(fā)出特定頻率和占空比的PWM波形,控制電機(jī)驅(qū)動(dòng)模塊輸出不同的電流、電壓,最終使擺桿完成需要的動(dòng)作。系統(tǒng)中的唯一動(dòng)力來源于直流電機(jī),通過L298N驅(qū)動(dòng)板可以產(chǎn)生相應(yīng)的正轉(zhuǎn)、反轉(zhuǎn),靈敏性好,同時(shí)控制所用的PWM波使用方便。
加速度傳感器模塊ADXL345作為角度測量傳感器,將系統(tǒng)的擺桿角度信息反饋給單片機(jī),并根據(jù)設(shè)定的程序,作出一系列的控制調(diào)節(jié),使擺桿完成相應(yīng)的動(dòng)作。
試驗(yàn)測試以及各功能指標(biāo)的實(shí)現(xiàn):1、完成了劃出預(yù)設(shè)長度的線段。根據(jù)需要的線段長度,設(shè)定對應(yīng)的角度值,在擺桿運(yùn)動(dòng)的過程中,依據(jù)角度測量傳感器傳輸回來的角度值,調(diào)節(jié)擺桿的角度到預(yù)定的角度值,通過算法不斷修正,進(jìn)而畫出對應(yīng)長度的線段。2、完成了預(yù)設(shè)角度的偏移。根據(jù)需要的角度,設(shè)定對應(yīng)的角度值,使相鄰的兩個(gè)電機(jī)同時(shí)工作,根據(jù)角度測量傳感器傳輸回來的角度值,結(jié)合PID算法來調(diào)節(jié)擺桿的相應(yīng)方向的偏移角度,進(jìn)而畫出預(yù)設(shè)角度偏移的線段。3、完成了擺桿的制動(dòng)功能。根據(jù)程序中不同的模式調(diào)節(jié),當(dāng)需要制動(dòng)功能時(shí),給予電機(jī)反相位的正弦波驅(qū)動(dòng),根據(jù)x,y兩個(gè)方向的分別調(diào)節(jié)制動(dòng),可實(shí)現(xiàn)5s內(nèi)完成制動(dòng)功能。4、完成了預(yù)設(shè)直徑的圓周運(yùn)動(dòng)。當(dāng)需要做圓周運(yùn)動(dòng)時(shí),給四個(gè)電機(jī)依次間隔四分之一周期輸入正弦波驅(qū)動(dòng),根據(jù)直徑要求,調(diào)節(jié)正弦波驅(qū)動(dòng)的幅值,即可改變圓的直徑,根據(jù)角度測量傳感器傳輸回來的數(shù)據(jù),結(jié)合PID算法實(shí)時(shí)進(jìn)行修正,完成預(yù)設(shè)直徑的圓周運(yùn)動(dòng)。
三、測試結(jié)果
將傳感器采集的數(shù)據(jù)進(jìn)行滑動(dòng)濾波,得到近似正弦曲線,取相應(yīng)方向的最大值,可以得到該方向上擺桿的角度,結(jié)合PID算法對運(yùn)動(dòng)軌跡進(jìn)行實(shí)時(shí)調(diào)整修正。較好的完成了預(yù)期的各項(xiàng)實(shí)驗(yàn)要求,測試過程中,完成了對指定長度以及指定角度的直線運(yùn)動(dòng),以及指定直徑的圓周運(yùn)動(dòng)。具有誤差小,穩(wěn)定快的特點(diǎn)。
四、創(chuàng)新特色總結(jié)
此風(fēng)力擺控制系統(tǒng)的設(shè)計(jì),以STM32F103單片機(jī)為控制核心,采用ADXL345角度傳感器實(shí)時(shí)采集擺桿旋轉(zhuǎn)的角度信息,并通過單片機(jī)控制直流電機(jī)實(shí)現(xiàn)擺桿的各種姿態(tài)。同時(shí)結(jié)合適當(dāng)PID算法修正偏差,以實(shí)現(xiàn)控制要求。本次所設(shè)計(jì)的風(fēng)力擺控制系統(tǒng)能夠完成實(shí)現(xiàn)預(yù)設(shè)的基本部分和發(fā)揮部分的所有指標(biāo)。總結(jié)該設(shè)計(jì)實(shí)現(xiàn)過程,具有以下三個(gè)方面的優(yōu)點(diǎn):首先,采用ADXL345角度傳感器進(jìn)行角度采集,無需額外附加驅(qū)動(dòng)電路,精簡了整體電路設(shè)計(jì)。因而該設(shè)計(jì)方案具有角度值精確度高,旋轉(zhuǎn)方向判別穩(wěn)定可靠,硬件電路接口簡單等優(yōu)點(diǎn)。其次,采用直流電機(jī),它具有體積小,重量輕,力矩大,運(yùn)行可靠等優(yōu)點(diǎn),非常適合本系統(tǒng)。再次,在該設(shè)計(jì)的程序編寫方面,用角度傳感器直接計(jì)算出擺桿的角度,然后通過PID算法修正,通過兩者的修正關(guān)系,極大地提高了實(shí)驗(yàn)精確度。以上三個(gè)方面的優(yōu)點(diǎn)是該設(shè)計(jì)方案取得良好實(shí)驗(yàn)結(jié)果的有力保障。同時(shí),該設(shè)計(jì)方案也存在不足和有待完善之處。如PID修正雖然提高了實(shí)驗(yàn)精度,但在實(shí)際情況中,硬件干擾會(huì)降低實(shí)驗(yàn)的成功率。
參 考 資 料
[1]譚浩強(qiáng).C語言程序設(shè)計(jì)[M].北京:清華大學(xué)出版社,2012;
[2]全國大學(xué)生電子設(shè)計(jì)競賽組委會(huì).全國大學(xué)生電子設(shè)計(jì)競賽獲獎(jiǎng)作品選 [M].北京:北京理工大學(xué)出版社,2007
[3]胡壽宋.自動(dòng)控制原理[M].6版.北京:科學(xué)出版社,2013
