基于ICCP算法的重力匹配仿真*
2017-01-11 03:34:40蔡龍飛
艦船電子工程 2016年12期
蔡龍飛 鄭 彤
(海軍駐武漢四三八廠軍事代表室 武漢 430064)
基于ICCP算法的重力匹配仿真*
蔡龍飛 鄭 彤
(海軍駐武漢四三八廠軍事代表室 武漢 430064)
利用地球物理場進行輔助匹配導航是組合導航技術研究領域的新方向,該技術為水下潛器無源定位提供新的手段。迭代最近等值線算法作為重要的匹配導航算法之一,但存在實時性不強、搜索速度慢等缺點。考慮到以上兩方面缺點,采用固定初始序列長度的方式對算法采樣結構進行改善并推導出單點迭代公式,同時采用滑動窗搜索方式縮小搜索范圍提高算法速度,最終實現實時ICCP算法設計。結果可以看出,該算法能夠實現單點迭代,匹配結果能實時跟蹤真實航跡。
迭代最近等值線算法;重力匹配;輔助導航;實時
(Military Representative Office in the 438th Factory, Wuhan 430064)
Class Number TP301
1 引言
海軍潛艇作為國家重要的威懾力量和海上突擊兵種,在高技術條件下海上局部戰爭中具有重要作用,同樣科學技術的發展對海軍潛艇的隱蔽性和續航能力提出了更高的要求。目前,潛艇水下導航主要采用慣性導航定位技術。然而,慣性導航系統定位誤差隨時間積累,無法長時間保持高精度。重力匹配輔助慣性導航技術具有完全自主性和高隱蔽性,能有效地對慣性導航系統誤差進行水下重調校正,較好地滿足潛艇長期隱蔽潛航的要求,是真正意義上的無源導航。該技術已經引起人們的極大關注,目前,美國、俄羅斯、澳大利亞和挪威等國已經對該項技術展開了深入研究[1~3]。
2 重力輔助慣導系統的原理
重力輔助導航系統是利用高分辨率的重力異常圖組成的基本特征信息數據庫,結合慣性導航系統給出的初始位置信息和海洋重力儀器提供的實測值,按照一定的匹配算法對慣性導航的初始位置進行校正,系統原理結構圖如圖1所示。
實測重力的具體位置信息,通常是以慣性導航的初始近似位置為基準,根據實際觀測精度確定置信區間范圍,提取已知的重力信息,并根據潛艇下潛深度進行重力異常的歸算,將海洋重力實測的重力值和重力數據庫提取的重力異常值歸算到同一個計算面上,然后按照一定的算法估算出最佳匹配,將匹配結果反饋給系統用來改正導航誤差。

圖1 重力匹配輔助導航原理圖
3 高精度重力場數據源基礎
要進行重力場圖形匹配,其首要條件就是要有高精度、高分辨率的重力背景場。從目前情況看,這個條件也已基本具備。各種高精度測高衛星的發射,如TOPEX、ERS-2、Envisat和Jason,已使從測高資料反演得到高精度和高分辨率的海洋重力場異常成為現實,目前已可以利用衛星測高資料反演獲得分辨率為2’×2’的較高精度的海洋重力異常。我國測繪單位完成了中國海域的許多遂行測量任務,特別是完成國家相關專項任務之后,獲得了許多重點海區高質量、高分辨率、高精度重力數據。中國海洋地質調查局、中油也進行了許多地區詳細的重力調查,這些數據在進一步精化和融合的基礎上可以得到進行重力匹配導航需要的重力數據基礎。
4 重力圖形匹配方法
重力圖形匹配方法是進行重力場圖形匹配的核心,簡單地說就是通過實測重力與存儲的重力數據進行匹配,實現對水下航行器的定位。算法的優劣直接影響到重力匹配輔助導航系統的定位精度、可靠性等重要指標。Behzed于1999年將圖像對準算法中的迭代最近點算法應用到水下航行器的導航中[4],提出了迭代最近等值線算法,此后許多學者對ICCP算法進行了深入研究,并廣泛應用于地形匹配、重力匹配、地磁匹配等輔助導航領域[5~11]。本文利用2′×2′衛星測高反演重力異常網格數據,ICCP匹配算法進行重新設計。
ICCP算法通過迭代計算、搜索最近點,實現測量值與背景場數據的最優匹配,從而獲得位置信息,實現導航。基于背景場可以繪制等值線,若在航過程中某個歷元的觀測值為T,則該點的位置實際上在磁力值為T的等值線上,但無法確定其具體位置。為了確定該位置,需借助INS提供的推算位置,縮小搜索空間,并利用ICCP獲取其實際位置。ICCP基于3點實現真實航跡的獲取:
1) 實際航跡點位于重力觀測值對應的等值線上;
2) INS存在積累誤差,在用于匹配的觀測序列的初始段,實際航跡點與INS提供的推算航跡點間存在偏差(Δx,Δy);
3) 匹配序列長度一般較短,在此期間,INS存在積累誤差,但主要表現為前期的積累誤差,匹配序列測量期間的積累誤差因為時間短可以不予考慮。
若能夠獲得INS推算航跡相對實際航跡的平移量(Δx,Δy)和旋轉角θ,則可獲得INS航跡與實際航跡的平移關系T以及旋轉關系R(θ)。 匹配定位過程如下所示。
1) 根據INS提供的推算點Pi(x,y),在其附近尋找重力觀測值Ti在背景場上對應的等值線。
(1)
(2)
然后,計算旋轉矩陣R(θ):

(3)


(S11+S22-λm)q0+(S21-S12)q3=0
q0=cos(θ/2),q3=sin(θ/2)
則旋轉角θ為:
tan(θ/2)=(S11+S22-λm)/(S21-S12)
其中,λm是W矩陣4個特征值λ中的最大者。

(4)
4) 用確定的旋轉矩陣R(θ)和平移量T,對P序列進行旋轉變換,得到一組序列X:
X=R(θ)P-T
(5)
將X作為新的序列,重復步驟2)~4),直到相鄰兩次得到的對應點的點位差滿足一定的限差條件,停止迭代,即迭代收斂。
5) 此時X序列中各點在背景場中的位置即為實際航跡點的或然位置。
5 仿真實驗
本文選擇的重力異常區域為北緯20°~30° ,東經125°~135° ,重力異常分辨率為2′×2′。仿真計算得出的航跡如圖2所示,經向匹配誤差圖如圖3所示,緯向匹配誤差圖如圖4所示。
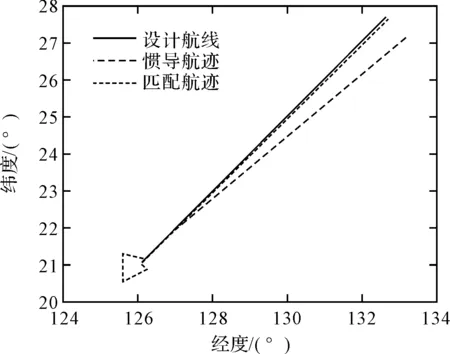
圖2 航跡圖

圖3 經向匹配誤差
從仿真的結果可以看出,慣性導航的誤差隨時間的增加而逐漸增大,經過重力異常數據匹配修正之后可以大大減小導航誤差,總體上能夠達到較高的導航精度。匹配精度和重力異常變化有關。經分析可知,此算法在重力異常變化較明顯的區域可以達到較高的導航精度,在重力異常變化不明顯的區域則精度較差,需要利用其它的導航信息加以補充,在重力異常變化較小的區域還會出現匹配誤差跳變情況使輔助導航失敗。因此在采用重力異常進行輔助導航時需要精心規劃導航路線,防止輔助導航出現匹配失敗。

圖4 緯向匹配誤差
6 結語
根據以上計算分析可知,基于重力背景場,借助ICCP技術,通過選擇合適的航行路線,完全可以實現準確的重力匹配,并修正INS,實現水下載體的自主導航。利用重力場匹配技術進行水下輔助導航時,在重力測量精度很高且重力異常變化較明顯的情況下,可以取得較高的匹配精度,但重力測量精度不夠且重力異常變化較小的情況下,實際應用效果較差。
[1] Rice H, Mendelsohn L, Aarons R, et al. Next Generation Marine precision Navigation system[C]// Position Location and Navigation symposium, San Diego, 2000.
[2] Affleck CA, Jircitano A. Passive Gravity Gradiometer Navigation system [C]// Position Location and Navigation Symposium, Las Vegas, 1990.
[3] Marshal M R, Richard EH, Christopher MS. An Investigation Into the Feasibility of Using a Modern Gravity Gradiometer Instrument of Passive Aircraft Navigation and Terrain Avoidance [C]// The 2009 International Technical Meeting of The Institute of Navigation, Anaheim, 2009.
[4] Behzad KP, Behrooz KP. Vehicle Localization on Gravity Maps[C]// SPIE—The International Society for Optical Engineering, Orlando,1999.
[5] 劉承香. 水下潛器的地形匹配輔助定位技術研究[D].哈爾濱: 哈爾濱工程大學, 2003.
[6] Bishop C. Gravitational Field Maps and Navigational Erors[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3):726-737.
[7] 張紅梅,趙建虎,王愛學等.預平移簡化ICCP匹配算法研究[J]. 武漢大學學報·信息科學版, 2010, 35(2):1432-1435.
[8] 趙建虎,張紅梅,王愛學等.利用ICCP的水下地磁匹配導航算法[J].武漢大學學報·信息科學版,2010,35(3):261-264.
[9] Wang Zhigang, Bian shaofeng. A Local Geopotential Model for Implementation of Underwater Passive Navigation[J]. Progress in Natural Science, 2008, 18(9): 1139-1145.
[10] 吳太旗, 黃謨濤, 邊少鋒等. 直線段的重力場匹配水下導航新方法[J]. 中國慣性技術學報, 2007,15(2):202-205.
[11] Xiao Shenghong, Bian Shaofeng. Research on Regional Model of Continuous Fourier Series of Marine Magnetic Anomaly Field Using for the Geomagnetic Navigation[C]// International Conference on Industrial and Information System, Wuhan, China, 2010.
Gravity Matching Simulation of Real-time ICCP Algorithm
CAI Longfei ZHENG Tong
The aided navigation with geophysical field is a new research direction in integrated navigation technology, and it provides a new method for the autonomous and passive navigation of underwater vehicle. As one of the important matching navigation algorithms, the Iterative Closest Contour Point (ICCP) algorithm has some disadvantages such as bad real-time performance, low searching speed. With respect to the two limitations mentioned above, the way to fix length of the sample sequence is adopted to improve the sampling structure, and a new iteraton equation with single sample point is derived. What's more, the searching mode of moving window is adopted to reduce the searching area and improve the operation speed of the algorithm. Finally, the real-time ICCP algorithm is designed. The simulation results show that the matching results can track the real positions in time.
ICCP, gravity matching, aided navigation, real-time
2016年6月6日,
2016年7月17日
蔡龍飛,男,工程師,研究方向:艦船電子。鄭彤,女,博士,工程師,研究方向:艦船電子。
TP301
10.3969/j.issn.1672-9730.2016.12.025
