基于MEMS IMU的室內導航系統設計*
2017-01-11 03:41:30聞澤陽許江寧于夢琦
艦船電子工程 2016年12期
關鍵詞:系統
聞澤陽 許江寧 于夢琦
(海軍工程大學導航工程系 武漢 430033)
基于MEMS IMU的室內導航系統設計*
聞澤陽 許江寧 于夢琦
(海軍工程大學導航工程系 武漢 430033)
為了實現低成本的室內導航,設計了基于慣性測量單元(IMU)的室內組合導航定位系統, 慣性測量單元(IMU)安裝在室內行人的肩部,在行人處于靜止狀態時以IMU輸出速度誤差與角速度誤差為觀測信息,并利用這些觀測信息通過卡爾曼濾波器估計IMU解算誤差。當行人處于行進狀態時,通過氣壓計測量室內行人所處的海拔高度,并通過磁力計測量航向角,氣壓計所測得的數據對IMU輸出高度進行修正,磁力計所測量的數據對IMU的航向角進行修正,在論文所構建的框架下來抑制IMU誤差積累。
室內導航; 慣性導航系統; 卡爾曼濾波器; 氣壓計; 磁力計
(Department of Navigation, Naval University of Engineering, Wuhan 430033)
Class Number U666.1
1 引言
導航具有很長時間的歷史,聰明的古羅馬人利用北極星和太陽的位置作為參照橫渡地中海,中國古代同樣也為人類導航做出了重大貢獻——指南針的發明。從現在科學定義的角度分析,導航是正確引導運載體沿著預定的航線在規定的時間從起始點到達目的地的技術或者方法,用來完成上述引導任務的設備(包括載體上和地面上的設備)系統成為導航系統[1]。按照導航是否需要外接參考信息,可以將導航分為自主導航和非自主式導航兩種[2]。自主式導航一般是指慣性導航(Inertial Navigation System,INS),非自主式導航主要包括天文導航、無線導航和微型導航等。本文將主要就衛星導航展開討論。
近幾年,行人導航系統(PNS)特別是室內行人導航系統獲得了巨大的關注。受限于室內環境GPS信號質量較差的條件,慣導系統累積誤差無法得到有效補償。此外,室內運動距離短、機動性強,因此室內導航定位系統需滿足高精度定位、快速反應等要求,而低成本的慣性導航系統受限于器件精度及技術工藝水平等諸多因素,必須依靠有效的外部信息輔助慣導系統來校正和抑制其累積誤差。
陀螺儀和加速度計是慣性導航系統最關鍵的兩個部件。載體在慣性空間的旋轉角速度由陀螺儀測量,載體的線加速度由加速度計測量,獲得數據后通過轉換和積分,載體的姿態、速度和位置等導航信息便應運而生。早期的陀螺儀應用十分有限,主要因其干擾力矩較大,精度很低。直到20世紀50年代,美國麻省理工學院的draper實驗室成功研制出液浮陀螺儀,才使得陀螺儀真正意義上達到了慣性導航的要求[3]。
非自主式導航系統必須要有其他地方的設備進行協同工作,它無法單獨依靠自身的導航設備進行導航。非自主式導航系統應用廣泛,無線電導航系統早期應用很多,如今已被微型定位系統所取代。衛星定位系統具有諸多優點,例如全天候、實時性等。它在全球范圍內為用戶提供高度精度的三圍位置、速度及時間信息,因而廣泛用于軍民領域。目前,美國的全球定位系統(GPS)已經投入運營,它的應用也最為廣泛,中國的“北斗”定位系統也正在加緊建設和完善,并且也已經發揮了很好的導航作用。但衛星定位系統在信號較弱甚至沒有的地區將會非常不便利,而且易受外界環境的干擾,數據更新速率也相對較慢。
組合導航能彌補以上兩種導航方式各自的不足,因而發揮各個導航系統的優勢,更能適應現代戰爭對導航的要求。因此,世界各國廣泛采用多設備組合、冗余設計、多功能的組合導航系統。其容錯能力和余度導航能力都得到了巨大的提高,從而增加了導航系統的可靠性。此外,組合導航由于其互補的能力因而對各個導航系統的精度要求相對較低,縮減了整個系統的成本。微型計算機與數字濾波技術的發展,即為組合導航的研究奠定了物質基礎,又提供了有力的處理工具。目前有多重組合導航的方式,如全球定位系統/慣性導航系統(GPS/INS),全球定位系統/多普勒導航系統(GPS/DNS),以慣性導航為主、GPS和地形輔助參考導航(TRN)為輔的組合導航系統(INS/GPS/TRN),組合衛星定位系統(GPS/GLONASS),衛星導航/天文導航(GPS/CNS)等[4]。
據調查統計[5],現在人類80%的時間都處于室內,室內地理信息的研究相應的變得越來越重要。但是現如今大多數地圖數據僅僅是適用于室外地理信息,GPS定位技術的準確性也僅僅局限在室外,室內的情況則無法勝任。本文正是在此背景下,研究基于低精度(價格較為低廉)MEMS慣性器件如何在室內長時間進行較高精度導航定位的功能。嘗試使用INS導航的方式提高姿態、速度和位置的解算精度,并且加入氣壓計,讀取溫度和氣壓并經過校正程序得到真實的氣壓高度,通過磁力計輸出行走航向,從而更好地完成室內導航的功能[6~7]。
本文提出了以氣壓計、磁力計輔助IMU的室內組合導航定位系統,IMU安裝在行人肩部,當行人處于靜止狀態時以慣導輸出速度為誤差及角速度誤差為觀測量,當行人處于運動狀態時以慣導氣壓計、磁力計輸出高度、航向為基準,對慣導輸出進行直接修正。
2 儀器介紹
2.1 主要器件
1) MPU-6050
MPU-6050集成了3軸MEMS陀螺儀,3軸MEMS加速度計以及一個課擴展的數字運動處理器DMP,可用I2C接口連接一個第三方的數字傳感器,比如磁力計。擴展之后,就可以通過其I2C或SPI幾口輸出一個9軸的信號。MPU-6050也可以通過其I2C接口連接非慣性的數字傳感器,比如壓力傳感器。MPU-6050的角速度全格感測范圍為±250、±500、±1000與±2000°/sec (dps),可準確追蹤快速與慢速動作,并且,用戶可程式控制的加速器全格感測范圍為±2g、±4g、±8g與±16g。產品傳輸可透過最高至400kHz的IC或最高達20MHz的SPI(MPU-6050沒有SPI)。
2) 磁力計HMC-5983
Honeywell三軸電子羅盤HMC5983是一個溫度補償的三軸集成電子羅盤,它是一種表面貼裝的高集成模塊,用于測量磁場,被廣泛應用在磁場檢測,手機、平板電腦、上網本、電子消費、自動導航和個人導航設備等領域。
HMC5983內置高分辨的HMC118X系列的磁阻傳感器加上ASIC,還有放大器,自動消磁帶、偏執帶和一個12bitADC,這款使得5983航向角的精度達到1-2°。
3) 氣壓計BMP180
BMP180是一款高精度、小體積、超低能耗的壓力傳感器,可以應用在移動設備中,它性能卓越,絕對精度最低可達到0.02hPa,符合測量大氣壓的精度要求,并且耗能極低,只有3uA。在低功耗的情況下,測量高度誤差為0.5m,在高功耗情況下測量誤差僅為0.17m,樓層通常情況下高約3m左右,故在樓層變換的時候該精度足以判斷樓層高度。
BMP180采用強大的8-pin陶瓷無引線芯片承載(LCC)超薄封裝,可以通過I2C總線直接與各種微處理器相連。
2.2 系統構成
本次測試仿真使用的IMU單元為mini INS/GPS電路板(組合了MPU-6050、HMC5983、BMP180和ublox MAX-7Q)。
電路板的驅動和解算程序能夠完成以下功能:
1) 讀取MPU-6050輸出的三軸角速度和三軸加速度ADC值;
2) 讀取HMC5893磁力計各個軸所感應到的磁力強度ADC值;
3) 讀取氣壓計BMP180的溫度和氣壓并經過校正程序得到真實的氣壓高度;
4) 運行AHRS解算程序,得到當前模塊的俯仰,橫滾,航向,氣壓高度和溫度;
5) 程序將各個傳感器值、解算后的姿態信息發送到主串口TXO輸出給上位機。連接上位機將顯示波形和各個傳感器的值。
通過加速度計和陀螺儀的數據能夠探測出行人步行的狀態,當測試人員處于靜止階段的時候,卡爾曼濾波器便會開始工作。因為當測試人員處于靜止階段的時候速度和角速度的值都應當為0,腳上IMU所測出的速度和姿態信息將被送入卡爾曼濾波器,作為觀測速度和角速度誤差的數據。
與此同時肩部IMU單元裝置有BMP180,用來測定此時此刻測試人員所處的高度信息(選在肩部的是因為人在行走過程中足部波動過大不便于測量)。將磁力計裝置在肩部,測量航向角。當行人處于運動狀態時,直接利用磁力計、氣壓計輸出對慣導進行修正。
行人靜止時,通過卡爾曼濾波器估計慣導解算誤差[5]。

(1)

系統量測方程為
(2)

該卡爾曼濾波器使用了如下公式組(3):
Pk=(I-KkHk)Pk/k-1
(3)
氣壓計BMP180也將引入系統之中,由于現代GPS接收器在海拔高度信息方面十分不可靠,有效的高度信息獲取就顯得十分重要了,利用氣壓和溫度數據并經過解算便可以獲取精度很高的高度信息。
探測器周圍的壓力隨著高度增加而減小,因此,壓力他側氣可以被用來計算其所在位置的高度,利用如下公式便可(其中p0是海平面的氣壓):
通常情況下[8~9],氣壓是隨著天氣變化而產生變化的(即使溫度的變化),為了能夠準確地測出海拔高度,嚴格上來說是更為準確地測出所在樓層,故采用了使用溫度和氣壓數據的解算程序以達到目的。
除此之外,裝置在肩部的磁力計HMC-5983也將投入使用以抑制航向角誤差。
磁力計通過測量地磁場水平方向分量確定磁北極方向并推算出其他方向。磁南北極與地理南北極兩軸線的夾角λ成為磁偏角,在磁極點處磁場和當地的水平面垂直,在赤道附近磁場和當地的水平面平行,所以在北半球和南北球磁場方向都傾斜指向地面。地磁場是一個矢量,在一個固定的地點,地磁場矢量可以被分解為兩個于當地水平面平行的分享和一個與當地水平面垂直的分量。當磁力計水平放置的時候,傳感器坐標系的X、Y軸在水平面內,X軸為前進方向,那么磁力計的X、Y、Z三個坐標軸就和這三個地磁場分量對應起來,如圖1所示。
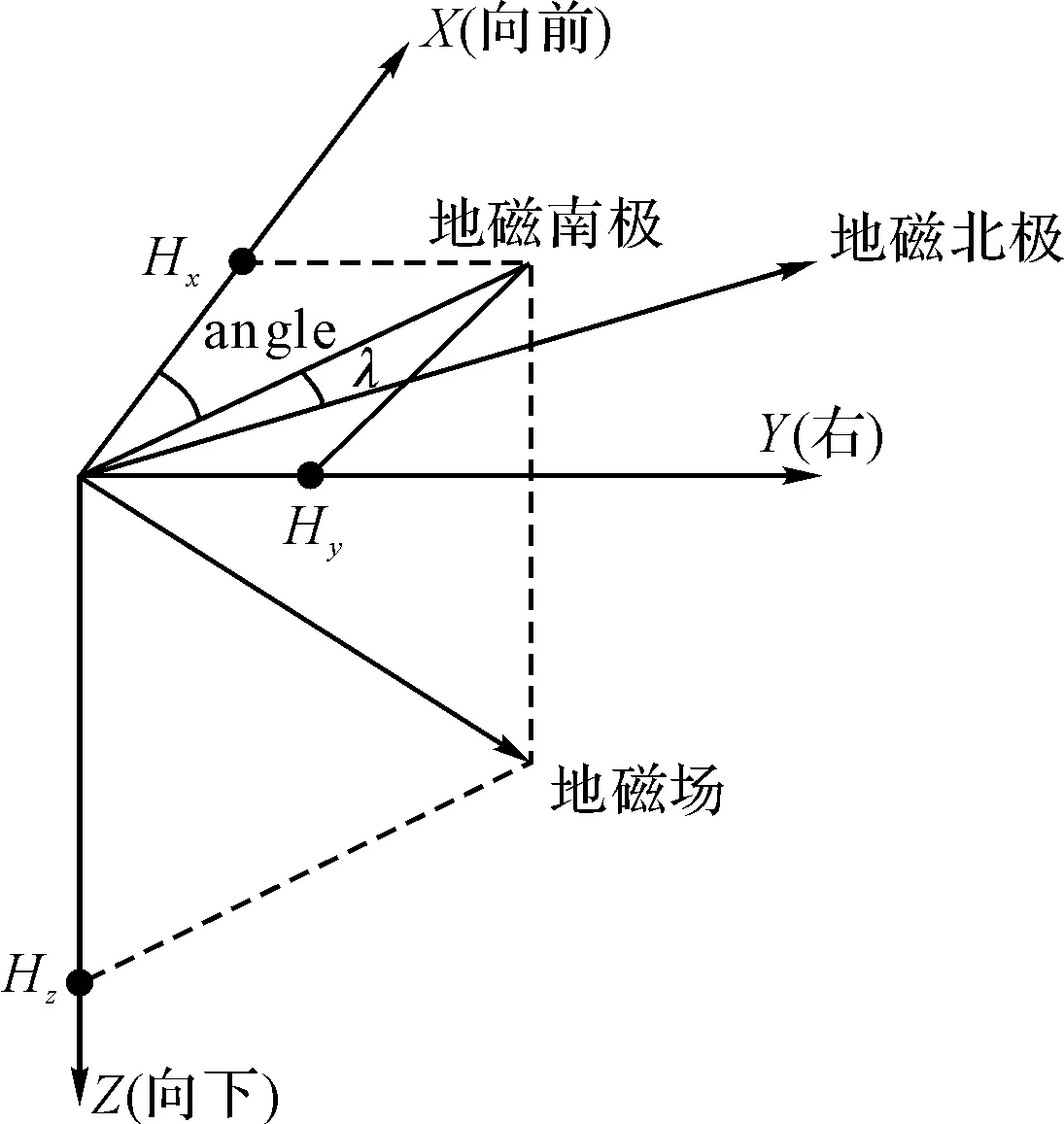
圖1 地磁場在水平面的矢量分解圖
圖1中X和Y軸在水平面內,Y軸向右且垂直于X軸,Z軸鉛垂向下,HX,HY,HZ分別為地磁場強度在地平面坐標系下X、Y、Z軸的磁場強度分量。angle為當地磁子午線順時針旋轉至傳感器前進方向的夾角[10]。
由于磁力計固定在肩膀上,當行人運動時會發生姿態變化,其俯仰角θ和翻滾角γ可以由慣導測出,根據坐標變換式(4),磁力計的三軸測量值Hx,Hy,Hz在水平面的投影值HX,HY為
HX=Hxsinθsinφ+Hycosφ-Hzcosθsinφ
Hy=Hxcosθ+Hzsinθ
(4)
根據磁力計在水平方向的投影值HX,HY,就可以計算肩上磁力計前進方向與當地磁子午線的夾角angle:
(5)

由于反正切公式計算出來的角度范圍與傳感器的輸出要求不符。所以要進行角度的處理,選擇易于編程的正切函數的變種函數atan2(y,x)。當參數x和y不同時為0時,atan2(y,x)是以坐標軸原點(0,0)為起點,指向(x,y)的射線在坐標平面上與x軸正方向之間的角的角度,該角度大小以弧度表示。
atan2(y,x)函數定義如下:
該函數的值域為(-π,π]。當y<0時,對atan2(y,x)的負數結果加上2π,將此函數的值域結果變化到(0,2π]范圍內,所以磁力計的角度輸出為
如果考慮上當地磁偏角λ,則航向角要為磁力計的角度加上地磁偏角,即:
α=angle+λ
(6)
每個地區的磁偏角λ是一個固定值,可以通過查表確定,并在解算程序中修正α的輸出在0~360°之間。
3 系統設計
利用慣導輸出判斷室內行人運動狀態[11~12],當行人靜止時,以慣導輸出的速度增量及角速度作為誤差觀測值,進行卡爾曼濾波,估計并補償慣導姿態、速度、位置誤差。行人處于運動狀態時,以氣壓計輸出的高度信息和磁力計輸出的航向角信息為基準,對慣導進行直接裝訂。避免慣導解算中由這兩個量引入的誤差。系統原理框圖如圖2所示。
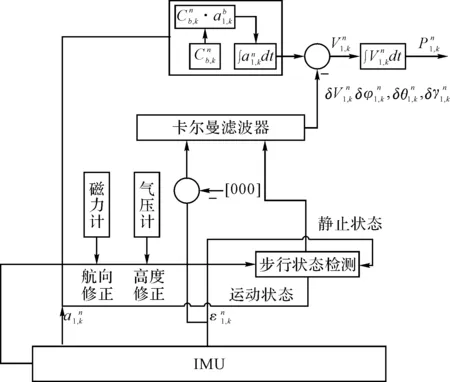
圖2 系統原理框4
3.1 測試及討論
為了驗證本文設計的室內導航系統的可行性,本節設計了兩種測試試驗,分別是平坦的地下停車場,來測試該系統在此室內環境的導航軌跡與實際軌跡的誤差以檢驗其性能優良。另外一個則是在有電梯的樓層之中,測試人員分別在各個樓層停留一段時間,測試氣壓計對于樓層的判斷是否足夠準確(氣壓計BMP180的測高精度可達0.17m,該精度足夠判斷行人所處的樓層)。
3.2 室內
測試人員處于地面平坦的室內環境,保持靜止,取校正前后慣導輸出的緯度為例,對比純慣性導航系統與本文設計的室內導航定位系統的定位精度,其對比曲線如圖3所示。
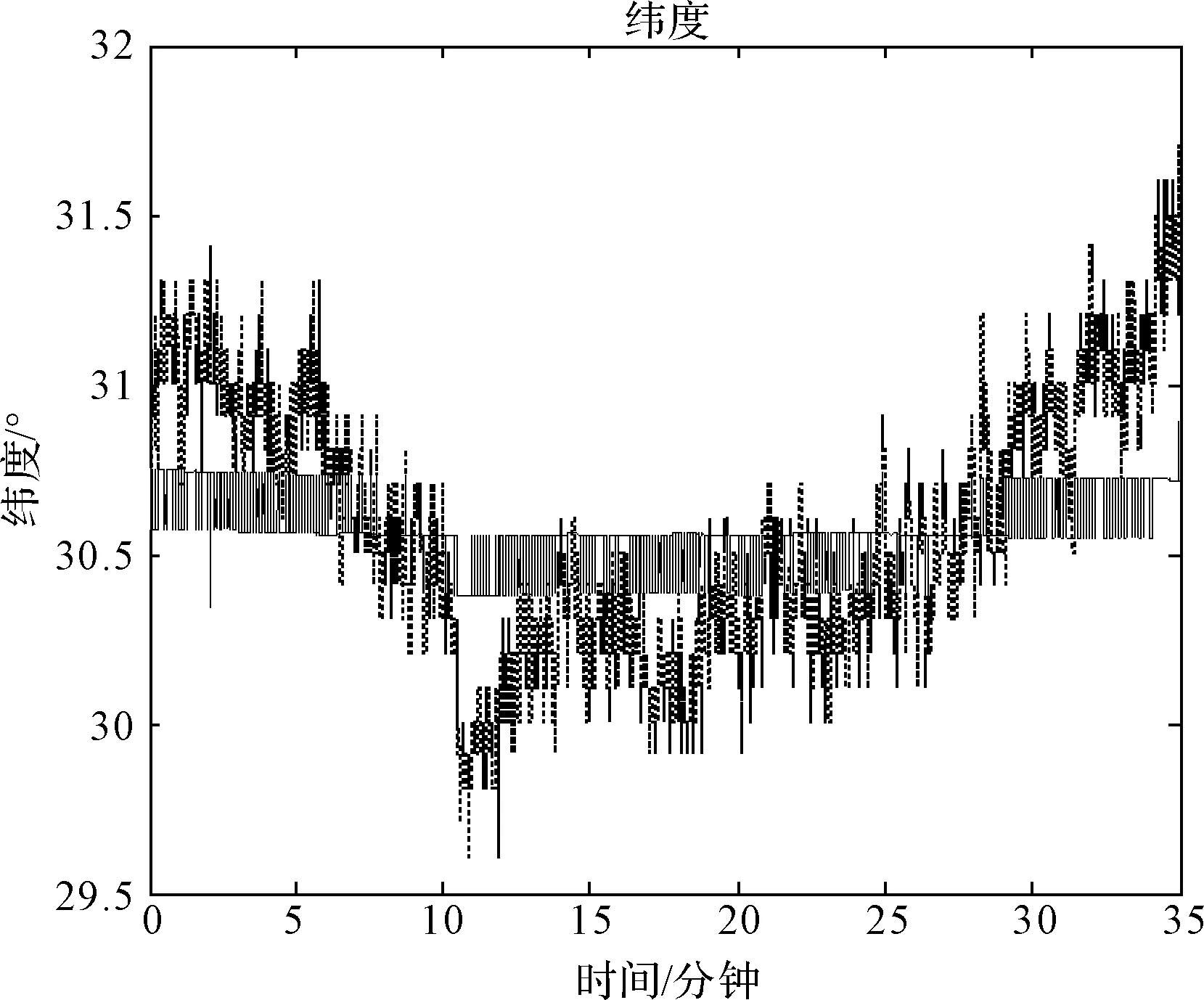
圖3 位置輸出對比
圖3中,曲線為純慣導系統的緯度輸出曲線,實線為本文設計室內導航定位系統的緯度輸出曲線。可以看出,本文設計的室內導航定位系統定位精度明顯提高,慣導位置輸出曲線得到了有效的抑制,輸出標準差由0.3°降低到0.09°。
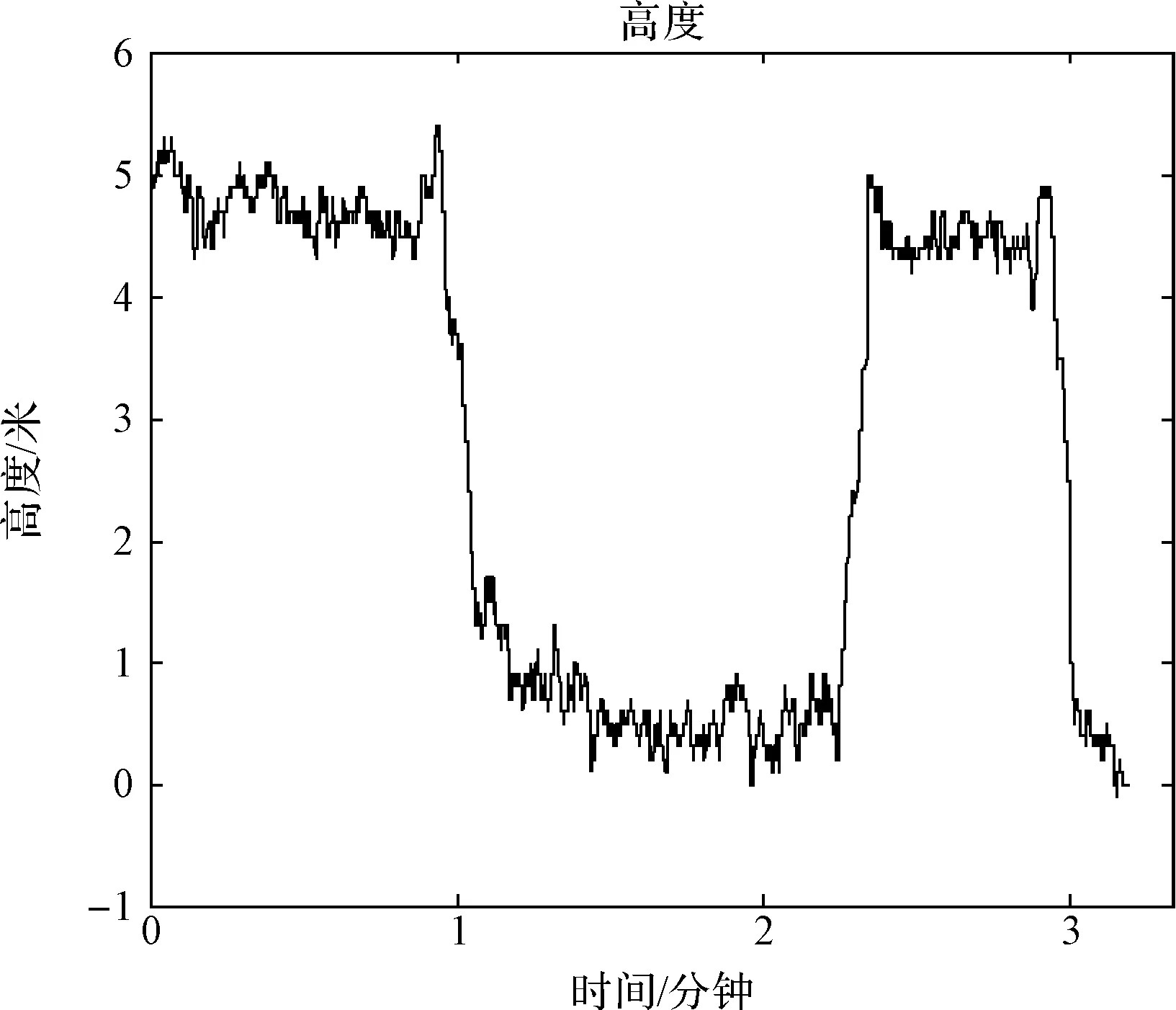
圖4 高度輸出
3.3 樓層測試環境
本部分將測試位于肩部IMU的氣壓計BMP180測量樓層信息的導航性能。測試人員將從二樓至一樓往返兩次,記錄本文設計的室內導航定位系統輸出高度,如圖4所示。
從圖4可以看出,在氣壓計的校正下,慣導系統輸出高度能夠較為準確地反映測試人員所處的樓層信息,相比純慣導狀態下的高度發散,該系統可以輸出可靠的高度信息。
4 結語
本文提出了以氣壓計、磁力計輔助IMU的室內組合導航定位系統,IMU安裝在行人肩部,當行人處于靜止狀態時以慣導輸出速度為誤差及角速度誤差為觀測量,當行人處于運動狀態時以慣導氣壓計、磁力計輸出高度、航向為基準,對慣導輸出進行直接修正。室內測試實驗與樓層測試實驗可以證明,相比純慣導系統,該系統的定位精度定位精度較高,高度輸出更為可靠準確。
[1] 姜朋,趙琳,孟超等.基于MEMS-IMU的捷聯式慣性導航系統技術與實現研究[D].哈爾濱:哈爾濱工程大學,2012:40-41.
[2] 張國良,曾靜,鄧芳林.用四元數法提取加速度計三軸轉臺測試中的動態誤差量[J].中國慣性技術學報,2000(3):1-3.
[3] 秦永元.慣性導航[M].北京:科學出版社,2006:1-5,40-41,78-79,358-361.
[4] 曾慶化,劉建業,彭文明等.我國衛星系統相關技術發展分析[J].航天控制,2006,24(4):91-96.
[5] 徐元,陳熙源,李慶華等.一種基于雙IMU框架的室內個人導航方法[J].中國慣性技術學報,2015(6):2-4.
[6] Godha S,Lachapelle G, Cannon M E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment[C]//ION GNSS,2006:1-6.
[7] 徐田來,游文虎,崔平遠.基于模糊自適應卡爾曼濾波的INS/GPS組合導航系統算法研究[J].宇航學報,2005(5):2-4.
[8] 曾偉一,林訓超,曾友周等.組合導航技術的發展趨勢[J].成都航空職業技術學院學報,2011(2):1-2.
[9] 張炎華,王立端,戰興群等.慣性導航技術的新發展及發展趨勢[J].中國造船,2008(1):1-2.
[10] 林敏敏,房建成,高國江.GPS/SINS組合導航系統混合校正卡爾曼濾波方法[J].中國慣性技術學報,2003(3):2-4.
[11] 韓輔君,徐靜,宋世忠.基于低成本多傳感器的自適應組合濾波[J].光學精密工程,2011(12):1-3.
[12] 于永軍,劉建業,熊志等.高動態載體精度捷聯管道算法[J].中國慣性技術學報,2011(2):1-3.
Design of Indoor Navigation System Based on Double MEMS IMU
WEN Zeyang XU Jiangning YU Mengqi
An indoor integrated navigation and positioning system based on inertial measurement unit (IMU) is designed, for the purpose of realizing low-cost indoor navigation. The IMU is installed on the pedestrian’s shoulder, Kalman filter (KF) estimate IMU calculation error when the pedestrian is in a static state, using the speed error and angular velocity error of IMU as the measurements. Altitude and yaw are measured by barometer and magnetometer, providing correction information, and restraining the error divergence of IMU.
indoor navigation, inertial navigation system, Kalman filter, barometer, magnetometer
2016年6月6日,
2016年7月20日
聞澤陽,男,研究方向:艦船綜合導航系統和高晶度慣性導航系統。許江寧,男,教授,博士生導師,研究方向:慣性技術及應用、衛星導航技術教學。
U666.1
10.3969/j.issn.1672-9730.2016.12.018
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
