五自由度混聯機器人優化設計與運動學分析
2017-01-09 05:31:36張東勝許允斗侯照偉姚建濤趙永生
農業工程學報 2016年24期
張東勝,許允斗,2,侯照偉,姚建濤,2,趙永生,2
?
五自由度混聯機器人優化設計與運動學分析
張東勝1,許允斗1,2,侯照偉1,姚建濤1,2,趙永生1,2※
(1. 燕山大學河北省并聯機器人與機電系統實驗室,秦皇島 066004; 2. 燕山大學先進鍛壓成形技術與科學教育部重點實驗室,秦皇島 066004)
為提高農業自動化程度,拓寬并聯機構在農業工程領域的應用,提出一種存在連續轉軸、關節數目少、易于控制的兩移一轉運動冗余平面并聯機構,該并聯機構任意位置的轉軸均為相互平行的連續轉軸,使其具備良好的靈活性。基于此平面并聯機構,構造出了多種五自由度混聯機器人,首先建立了五自由度混聯機器人的運動學模型,并對其進行了奇異分析,給出了減少機構奇異位型的條件;然后基于靈活性指標,對并聯機構進行了尺寸優化,繪制了用于選取結構尺寸的性能圖譜,且借助有限元軟件對基于優化所得結構尺寸繪制的具有運動冗余特性的平面機構進行了結構拓撲優化,,完成了整體結構優化前后的靜力學分析與對比,結果顯示優化前后整體變形僅增大0.51%,優化前后機構優化部分的質量減少33.02%,滿足機構變形要求。該混聯機器人具有結構簡單、運動學模型簡單、結構剛度高和模塊化程度高的特點,且其結構的變胞性有助于實現機構運動和驅動冗余模式的切換,增強了機器人的可研究性。該文可為混聯機器人運動學分析及優化設計提供參考。
機器人;設計;優化;平面并聯機構;運動冗余;自由度;變胞機構
0 引 言
農業機器人技術是當今國際農業機械化研究的前沿領域,近年來隨著新型農業的發展及新技術的開發,農業機器人已經得到了廣泛的應用,如插秧、耕作、果蔬采摘、伐木、篩種、產品包裝機器人等[1-4]。農業生產的多樣性及農業作業的復雜性等特點對農業機器人的先進性及實用性提出了較高的要求。
農業機器人不再僅僅局限于傳統的串聯機構,農業生產方式也走向多樣化市場,其中專門用于農業領域的并聯機器人具有較高的研究價值[5-7]。并聯機構與串聯機構相比具有結構緊湊,剛度高,承載能力大等優點,使得并聯機器人在某些農業領域有著較高地位和應用價值[8-9]。并聯機構又分為空間和平面并聯機構,其中平面并聯機構具有結構簡單、運動學模型簡單、易于控制等特點,所以平面并聯機構受到很多研究人員的重視[10-12]。基于平面并聯機構結構、運動特性簡單及易于實現軌跡規劃的特點,很多學者提出了不同的平面并聯機構并對其進行了深入的理論研究,例如:平面5R[13]、PRRRP[14]、3(4)-RRR[15-16]、3-RPR[17]并聯機構(其中R、P分別代表轉動副、移動副)、二自由度五桿移動機器人[18]等。然而現代很多農業領域覆蓋包括食品包裝、種子篩選、果實分類、果蔬搬運、采摘及運輸等。通常情況下,普通的少自由并聯機構無法完成此類作業,而多軸聯動機器人[6,19-20]便成為首選目標。基于平面并聯機構構造出的五自由度混聯機器人,結合了平面并聯機構和串聯機器人的優點,既有平面并聯機構承載能力大、結構及運動學模型簡單的特點,又有串聯機構工作空間大且靈活的特點。
齊二機床廠與清華大學聯合研制出大型龍門式五軸聯動混聯機器人XNZ2430[21],該混聯機器人并聯部分為能夠實現垂直平面內兩移動自由度的平面機構,在動平臺上串聯兩個自由度的擺頭,附加可移動工作臺,從而實現機器人的五軸聯動。麻省理工學院設計了一種小型的混聯五軸聯動機器人MIT-SS-1[22],平面并聯機構3PRR實現垂直面內的2個移動和回轉運動,附加工作臺的移動和轉動2個運動。Rosyid等[23]提出了一種基于平面并聯機構3PRR構造出的五自由度混聯機器人,該混聯機器人由相互正交的兩組3PRR并聯機構組成。從上述混聯機器人構型可知,平面并聯機器人在現代機器人中具有非常重要的地位。然而除文獻[18]提到的一種基于平面二自由度并聯機構所構造的種苗移摘的機器人外,少有能夠應用到農業領域的混聯機器人。
本文綜合以上內容提出了一種結構簡單、關節數目少、剛度高的兩移一轉三自由度平面并聯機構,并基于此并聯機構構造出了存在連續轉軸、模塊化程度高、整體結構簡單的五自由度混聯機器人構型;建立了五自由度混聯機器人運動學模型,并對機構進行了奇異性分析,然后以動平臺的靈活性指標對平面并聯機構的結構尺寸進行了優化,繪制了用于選取結構尺寸的性能圖譜,且借助有限元軟件對基于優化所得結構尺寸繪制的具有運動冗余特性的平面機構進行了結構拓撲優化,達到在保障機構剛度的前提下降低分支質量,并對拓撲優化前后整體結構進行了靜力學對比分析。
1 五自由度混聯機器人的構型設計
在機器人的研究領域,由于機器人的不同構型,會對工作空間、整體剛度以及精度等機器人性能造成不同影響,故關于機器人結構的綜合及對比分析尤為重要,這使得機器人的構型設計成為機器人產品化之前的一項重要的工作。本節將首先給出三自由度平面并聯機構的詳細設計原則,然后列出串聯部分的幾種構型。
1.1 平面并聯機構
三自由度平面并聯機構如圖1所示,由機架、動平臺及三條結構相同的PRR分支組成,該平面機構動平臺具有沿和軸方向的移動和繞軸的轉動自由度(2T1R)。如圖1所示,左上分支1和左下分支2中連接動平臺的R副共軸,此并聯機構共有8個關節,運動副只有移動副和轉動副,使其具備機構簡單的特點。當右上分支3和動平臺共線時,此并聯機構即發生奇異,影響機構的自由度,對機構的運動學以及動力學均造成較大的影響。除此之外,在實際應用中并聯機構的奇異位型很大程度上影響了本身的工作空間。
1.左上分支 2.左下分支 3.右上分支 4.右下分支
1.Upper left branch 2.Lower left branch 3.Upper right branch 4.Lower right branch
注:-為參考坐標系,下同。
Note:-is reference coordinate system, the same as below.
圖1 三自由度平面并聯機構
Fig.1 3-DOF planar parallel mechanism
驅動冗余[5,24-26]可以有效減少奇異、提高并聯機構的剛度、增大工作空間等,從而提高機器人的力傳遞性能,改善機構的性能,使機構在原始的奇異位形也能正常工作。因此驅動冗余并聯機器人已經成為并聯機器人家族中不可缺少的一部分,而日益成為研究熱點。所以為增加機構的整體剛度、有效減少奇異位型,在2T1R平面并聯機構3PRR基礎上添加冗余驅動分支(圖1中虛線部分)構成具有冗余驅動的平面并聯機構(10個關節)。這種方案可有效減少機構的奇異位型,增大機構的靈活性、有效工作空間及整體結構剛度。
雖然通過添加冗余驅動可以減少機構奇異、增大有效工作空間,但其缺點是會使機構產生內力,給機構的控制帶來一定的難度[27-29]。如圖2所示(針對圖1a所示結構),采用引入中間連桿5的方法不僅能有效的減少奇異位型[30],而且能很好的消除因冗余驅動而造成的內力。圖2所示的運動冗余平面機構的動平臺與圖1一樣具有兩移一轉3個自由度,其共有11個關節。該機構的第4個驅動增加的是連桿5和動平臺之間的姿態自由度,故該機構的4個驅動中不含有冗余驅動。
如果將動平臺和中間連桿之間的轉動副鎖死,那么該機構即成為上述具有冗余驅動的平面并聯機構。結構的變胞性有助于實現機構運動冗余和驅動冗余模式的切換,使其在后期研究工作中,不僅可以研究運動冗余平面并聯機構的控制策略,而且還可以研究具有冗余驅動平面并聯機構的控制策略,增強了機器人的可研究性。
1.2 混聯機器人構型
構造五自由混聯機器人關鍵在于彌補動平臺方向的方位調整能力和方向的移動能力(TR構型:具有移動和方位調整能力的機構)。上述平面機構為 2T1R并聯機構,所以還需要添加一個移動和一個轉動自由度,從而構成五軸聯動。這可通過將具有一個轉動自由度的工作臺附加于可移動平臺上(如圖3a和3b所示),或者在動平臺下方添加具有一個轉動自由度的擺頭和可移動的平臺的方式(如圖3c所示)來構造五自由混聯機器人。
如上所述,該運動冗余平面并聯機構的動平臺能實現沿水平和豎直方向的移動、繞方向的方位調整;可轉動工作臺/擺頭可實現相對動平臺另外一個方向的方位調整;可移動平臺移動方向與并聯機構所在平面垂直,用于實現沿方向的移動,從而形成機器人的五軸聯動。
對圖1、圖2和圖3中構型方案進行排列組合,共可構造出15種五自由度混聯機器人結構,其中驅動冗余混聯機器人6種、運動冗余混聯機器人3種,既非驅動冗余又非運動冗余混聯機器人6種。
通過觀察圖1給出的驅動冗余平面并聯機構:圖1a,4條分支上下和左右對稱布置,且尺寸相同;圖1b,4條分支左右對稱布置,兩兩尺寸相同。圖1a所示方案具有正反解簡單、結構簡單、控制容易的特點,圖1b所示方案具有結構緊湊的特點。通過觀察圖3給出的3種TR構型:圖3a和3c結構的相似之處在于彌補的是動平臺繞軸方向的轉動能力,圖3b彌補的是動平臺繞軸方向的轉動能力。3種方案均可實現混聯機器人的五軸聯動,但是圖3b所示方案與另外2種方案相比具有更易于保障結構剛度的特點。
通過以上結果的對比分析,結合圖3和圖2b即可從上述15種混聯機器人中優選出一種運動冗余五自由度混聯機器人。此類型五自由度混聯機器人的運動學模型簡單、結構簡單,具有運動冗余機器人的特性,以及串聯環節結構剛度大的優點。下文將對此種機器人進行分析。
2 五自由度混聯機器人運動學模型
結合圖2和圖3b組成運動冗余五自由度混聯機器人,其三維模型和結構簡圖如圖4所示。為了更好的對機構進行分析,需要建立該機構的參數模型,在動平臺上建立動系-,在定平臺上建立參考坐標系(定系)-。在定系中,轉動副中心A的位置向量為;點、、的位置向量分別表示為、、。
2.1 位置分析
2.1.1 位置反解
由于該五自由度混聯機器人的并聯部分和串聯部分為獨立設計,所以目標體的位姿由并聯和串聯部分協調完成,且兩部分的運動解耦,故在此僅給出并聯部分的運動學模型。平面并聯機構動平臺的參考點為點,姿態矩陣為。
動平臺點在定系中的位置向量為

式中=(0)T為點在動系中位置向量;為動平臺的長度,mm;為點在定系中的位置向量。
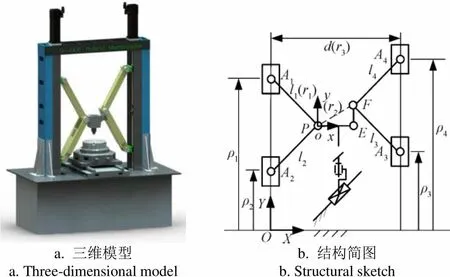
a. 三維模型a. Three-dimensional modelb. 結構簡圖b. Structural sketch
注:為動坐標系;為動平臺左側轉動副的中心;為動平臺右側轉動副的中心;為中間連桿上側轉動副的中心;A(=1,2,3,4)為滑塊上轉動副的中心;l(=1,2,3,4)為各分支的長度,mm;ρ(=1,2,3,4)為各分支的移動副中心到軸的距離,mm;為兩側滑塊在方向的距離,mm;r(=1,2,3)為無量綱參數。
Note:-is moving coordinate system;is center of revolute joint located in left of moving platform;is center of revolute joint located in right of moving platform;is center of revolute joint located in top of intermediate link; A(=1,2,3,4) is center of revolute joint located in slider;l(=1,2,3,4) is branch length, mm;ρ(=1,2,3,4) is distance from the center of prismatic joint to theaxis, mm;is horizontal distance of sliders on both sides, mm;r(=1,2,3) is dimensionless parameter.
圖4 五自由度混聯機器人
Fig.4 5-DOF hybrid serial-parallel manipulator

式中為A點在定系中的位置向量;單位向量=(0 1)T,與定系的軸同向;ρ為移動副中心到軸的距離,mm;=(0)T為34直線與軸交點在定系中的位置向量,為兩側滑塊在方向的距離,mm。
設分支桿的長度為l(=1,2),那么

將式(3)代入式(4)可得
(5)
式(5)展開化簡得

式中1i為一次項系數;1i為常數項。
設動平臺和連桿之間的角度(用于體現機構的奇異性),rad,那么
式中為點在定系中的位置向量;為單位矩陣;為連桿相對動平臺的姿態矩陣;為連桿的長度,mm。
根據分支3,4的定桿長可知

式(8)展開化簡得
(9)
式中*為中間代換量;2i為一次項系數;2i為常數項。
當給定目標體的抓取點位置和抓取方向時,即可求解出移動平臺和旋轉工作臺的輸入量,并可折射出動平臺的位姿,然后結合式(6)和式(9)即可根據動平臺的給定位姿和動平臺和之間的角度,求解出并聯機構的各個驅動的輸入量。
2.1.2 位置正解
不同于空間并聯機構,平面并聯機構的位置正解非常簡單,可通過幾何法求出。當給定4個驅動分支的輸入時,即可快速求解出動平臺的位姿。
當給定驅動的輸入量ρ(=1,2,3,4),轉動副中心A的位置即可確定。分別以點1和2為圓心,做半徑為的圓,其交點記為點;分別以點3和4為圓心,做半徑為的圓,其交點記為點;分別以點和為圓心,以和為半徑做圓,其交點記為點。平面并聯機構的正解需考慮并聯機構的幾何特點,對圓交點進行取舍得到唯一的位置正解,例如:交點點和點應取機架左右移動副之間的點,交點需根據的具體值進行取舍。
2.2 雅克比矩陣的建立
將式(2)對時間求導可得

將式(4)對時間求導可得

將式(3)對時間求導并代入式(11)中可得
(12)
由連桿長度為,得

將式(13)對時間求導可得
(14)
聯立式(10),(14)可得

將式(8)對時間求導,并對其進行整理
(16)
將式(16)記為
由式(17)可得
(18)
將式(18)代入式(15)中可得

結合式(12)和式(19)可得
(20)
由式(20)可知,在保證分支1、2不重合,分支3、4不重合的前提下,直線不通過點(0<<π/2),矩陣和滿秩,機構即可避免發生奇異。值得一提的是,動平臺和之間的角度可以體現機構的奇異度:當趨近于π/2時,機構遠離奇異;當趨近于0時,機構接近奇異。
3 尺寸及結構拓撲優化
機器人優化設計是對機器人綜合性能的量化,在機器人的設計階段,優化可分為尺寸優化和機構拓撲優化。尺寸優化是在保證機器人性能的前提下獲取較佳的結構參數;結構拓撲優化是在保證機器人結構剛度的前提下獲取較佳的結構構型。
3.1 并聯機構尺寸優化
為了使機構遠離奇異,取=π/2,則動平臺和連桿可看成一個新的動平臺結構,其長度為,mm。。為簡化優化參數,定義=3,則機構所需優化的尺寸參數為、、。
尺寸參數無量綱化[14],消除機構的物理屬性,令=(++)/3,則1=/,2=/,3=/(為歸一化因數)。為滿足機構的可裝配性,無量綱參數1,2,3應滿足以下方程
據式(21),分別以1、2和3為兩兩垂直的坐標軸,可以得到該機器人設計空間的三維表示形式,創建一個如圖5a所示的設計空間,圖5a中的三角形為該機構的設計空間。將空間的三角形轉換到二維平面中(如圖5b所示),其轉換關系式為
(22)
式中、為無量綱參數。
由于此并聯機構構型主要限制動平臺在方向的運動能力,絲杠的行程主要限制動平臺在方向的運動能力。所以接下來以動平臺的靈活性指標對平面并聯機構的結構尺寸進行優化,定義動平臺中心點的有效行程(動平臺任意點的轉動能力達到±π/6),將動平臺的有效行程與理論最大行程(3?2)之比作為目標值[=/(3?2)],則目標值∈(0,1)。借助Matlab繪制性能圖譜,如圖6所示。
觀察圖6中可以得到:優化區域輪廓趨于三角形。通過分析圖中三角形邊所在位置的優化值,可以較方便的獲得較優區域。
由于結構尺寸優化并沒有最優尺寸,而只能取得相對較好的結構尺寸[14],所以為獲得較大的有效行程比,可以取目標值>0.7的坐標點。當坐標(,)=(1.47, 0.5)時,=0.78>0.7,由式(22)可知2==0.5,取動平臺長度=180 mm,根據歸一化因數,求出=388.22 mm,=560.46 mm。運用此組優化數據所得的結構尺寸,設計出的三維模型如圖4a所示。
3.2 結構拓撲優化
在盡量保證機器人結構剛度的前提下,以材料質量為狀態變量對模型分支桿(材料定義為結構鋼)進行優化。利用ANSYS Workbench中的拓撲優化模塊對機構的上下分支桿結構進行優化,以達到盡量維持原結構剛度基礎上,降低分支桿質量的目的。
上分支和下分支優化前結構分別如圖7a和7b所示,優化目標:單分支允許變形量小于10%,分支減輕質量比大于25%。分支桿可以看做二力桿,受到重力、沿桿長方向拉(壓)力、沿方向的壓力。
如果將分支桿與滑塊連接端視為固定端,分支桿水平布置,在分支另一端加載沿桿長方向拉力和沿方向的壓力各100 N。為使拓撲優化所得結果更加直觀,鑒于分支結構重力方向為軸方向(位于平面中),所以將分支受桿長方向的拉力與重力歸為一組,將分支桿受垂直于平面的壓力(軸方向的壓力)為另一組,然后對上述兩組單獨進行優化。上分支優化結果如圖8a和8b所示,下分支優化結果如圖8c和8d所示,其中圖8a和8c為分支受重力和拉力時拓撲結果,圖8b和圖8d為分支受壓力時拓撲結果。
拓撲優化結果為不規則形狀,在實際的結構設計中,考慮到零件外觀、加工工藝性、可實施性及應力分布問題等情況,不能將所有淺色區域(虛線內部)全部切除,參考圖8所示拓撲優化結果,優化后模型如圖9所示。為了更好的驗證優化結果,對上分支和下分支進行有限元對比分析,并且將上下單分支的靜剛度分析結果及減輕質量比進行匯總,參考表1。
通過觀察對比分析表1中的數據可知:與優化前分支相比,上分支的變形量增大0.001 7 mm,占原分支變形量的9.66%;質量降低了2.744 8 kg,占原分支質量的36.79%;下分支的變形量增大0.001 4 mm,占原分支變形量的6.28%;質量降低了3.126 1 kg,占原分支質量的29.24%。上下分支均滿足單分支允許變形量小于10%及分支減輕質量比大于25%的優化目標。

a. 優化后上分支a. Upper branch after optimizingb. 優化后下分支b. Lower branch after optimizing

表1 分支桿結構優化前后對比
表1中的數據針對的是上下單分支,為了進一步提高結果可靠性,將優化分支導入模型,通過有限元軟件對整體機構進行分析對并聯機構整體結構進行了靜力學分析。圖10給出了在動平臺上施加沿方向各100 N情況下的初始位姿整體變形,其中圖10a為分支優化前位移變形,圖10b為分支優化后位移變形。
a. 優化前位移變形
a. Total displacement deformation before optimizing
由圖10所示機器人整體結構受力變形前后的對比可知,機器人優化后整體變形較優化前整體變形僅僅增大了0.51%,但優化前后機構優化部分的質量減少了33.02%,達到了結構拓撲優化的目的,這對機構整體性能的提升起到良好的推進作用。
4 結 論
1)提出一種結構簡單、存在連續轉軸、關節數目少的2T1R運動冗余平面并聯機構,并構造出了多種五自由度混聯機器人。
2)推導出了五自由度混聯機器人的位置正反解,體現出了機構運動學模型簡單的特點,建立了并聯部分的速度雅克比矩陣,并對其進行了奇異分析,給出了減少機構奇異位型的條件及遠離機構奇異的原則。
3)基于靈活性指標,對并聯機構進行了尺寸優化,繪制了用于選取結構尺寸的性能圖譜;借助有限元軟件對具有運動冗余特性的平面機構進行了結構拓撲優化,達到減少機構質量的目的,并分別完成了單分支及整體結構優化前后的靜力學分析與對比,結果顯示優化前后整體變形僅增大0.51%,優化前后機構優化部分的質量減少33.02%,驗證優化結果的合理性。
本文研究為該五自由度混聯機器人后期樣機的研制提供了理論依據,為拓展農業機器人的應用范圍提供了參考。
[1] Hayashi S, Yamamoto S, Saito S, et al. Field operation of a movable strawberry-harvesting robot using a travel platform[J]. Japan Agricultural Research Quarterly: JARQ, 2014, 48(3): 307-316.
[2] Oberti R, Marchi M, Tirelli P, et al. Selective spraying of grapevines for disease control using a modular agricultural robot[J]. Robotic Agriculture, 2015, 30:1-13.
[3] 權龍哲,張冬冬,查紹輝,等. 三臂多功能棚室農業機器人的運動學分析及試驗[J]. 農業工程學報,2015,31(13):32-38.
Quan Longzhe, Zhang Dongdong, Zha Shaohui, et al. Kinematics analysis and experiment of multifunctional agricultural robot in greenhouse with three arms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 32-38. (in Chinese with English abstract)
[4] Agarwal N, Thakur R. Agricultural robot: intelligent robot for farming[J]. International Advanced Research Journal in Science, Engineering and Technology, 2016, 3(8): 117-181.
[5] 牛雪梅,高國琴,劉辛軍,等. 三自由度驅動冗余并聯機構動力學建模與試驗[J]. 農業工程學報,2013,29(16):31-41.
Niu Xuemei, Gao Guoqin, Liu Xinjun, et al. Dynamics modeling and experiments of 3-DOF parallel mechanism with actuation redundancy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(16): 31-41. (in Chinese with English abstract)
[6] Xue Ziyun, Zhang Bin, Zhang Dongbo. Design and kinematic analysis of a new 3-DOF hybrid mechanism[C]// Advanced Materials Research. Trans Tech Publications, 2014, 950: 69-74.
[7] 金波,林龍賢. 果蔬采摘欠驅動機械手爪設計及其力控制[J]. 機械工程學報,2014,50(19):1-8.
Jin Bo, Lin Longxian. Design and force control of an underactuated robotic hand for fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50(19): 1-8. (in Chinese with English abstract)
[8] 張金柱,金振林,陳廣廣. 六足步行機器人腿部機構運動學分析[J]. 農業工程學報,2016,32(9):45-52.
Zhang Jinzhu, Jin Zhenlin, Chen Guangguang. Kinematic analysis of leg mechanism of six-legged walking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(9): 45-52. (in Chinese with English abstract)
[9] 牛軍川,張福亮. 三平移(3-PRRP~(4R))并聯減振機構的設計與剛度分析[J]. 農業工程學報,2016,32(7):58-65.
Niu Junchuan, Zhang Fuliang. Design and stiffness analysis of three-dimensional (3-PRRP~(4R)) parallel vibration reduction mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(7): 58-65. (in Chinese with English abstract)
[10] Gosselin C, Laliberté T, Veillette A. Singularity-free kinematically redundant planar parallel mechanisms with unlimited rotational capability[J]. Robotics, IEEE Transactions on, 2015, 31(2): 457-467.
[11] Wu J, Wang J, Li T, et al. Analysis and application of a 2-DOF planar parallel mechanism[J]. Journal of Mechanical Design, 2007, 129(4): 434-437.
[12] Huang T, Li Z, Li M, et al. Conceptual design and dimensional synthesis of a novel 2-DOF translational parallel robot for pick-and-place operations[J]. Journal of Mechanical Design, 2004, 126(3): 449-455.
[13] Liu X J, Wang J, Pritschow G. Kinematics, singularity and workspace of planar 5R symmetrical parallel mechanisms[J]. Mechanism and Machine Theory, 2006, 41(2): 145-169.
[14] 劉辛軍,王立平,吳澤啟,等. 基于力傳遞性能的平面并聯機器人的優化設計[J]. 清華大學學報(自然科學版),2008,48(11):1927-1930.
Liu Xinjun, Wang Liping, Wu Zeqi, et al. Optimum design of a planar parallel robot based on force transmissibility[J]. Journal of Tsinghua University(Science and Technology), 2008, 48(11): 1927-1930. (in Chinese with English abstract)
[15] Gosselin C, Angeles J. The optimum kinematic design of a planar three-degree-of-freedom parallel manipulator[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1988, 110(1): 35-41.
[16] Xu B, Li T, Liu X, et al. Workspace analysis of the 4RRR planar parallel manipulator with actuation redundancy[J]. Tsinghua Science & Technology, 2010, 15(5): 509-516.
[17] Mousavi M A, Masouleh M T, Karimi A. On the maximal singularity-free ellipse of planar 3-RPR parallel mechanisms via convex optimization[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(2): 218-227.
[18] Hu J, Yan X, Ma J, et al. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot[J]. Computers & Electronics in Agriculture, 2014, 107(3): 64-72.
[19] 崔國華,張艷偉,張英爽,等. 六自由度串并聯機械手的構型設計與運動學分析[J]. 農業工程學報,2010,26(1):155-159.
Cui Guohua, Zhang Yanwei, Zhang Yingshuang, et al. Configuration design and kinematic analysis of serial-parallel manipulator with six degrees of freedom[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(1): 155-159. (in Chinese with English abstract)
[20] Guo W J, Li R F, Cao C Q, et al. Kinematics analysis of a novel 5-DOF hybrid manipulator[J]. International Journal of Automation Technology, 2015, 9(6): 765-774.
[21] 劉前軍,關立文,王立平. 一種混聯機床運動學建模及研究[J]. 機床與液壓,2007,35(10):64-66.
Liu Qianjun, Guan Liwen, Wang Liping. Kinematics model building and researching on a type of hybrid parallel machine tool[J]. Machine Tool and Hydraulics, 2007, 35(10): 64-66. (in Chinese with English abstract)
[22] Son S, Kim T, Sarma S E, et al. A hybrid 5-axis CNC milling machine[J]. Precision Engineering, 2009, 33(4): 430-446.
[23] Rosyid A, El-Khasawneh B, Alazzam A. Optimized planar 3PRR mechanism for 5 degrees-of-freedom hybrid kinematics manipulator[C]//ASME 2015 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, 2015: V011T14A030-V011T14A030.
[24] Wu J, Chen X, Li T, et al. Optimal design of a 2-DOF parallel manipulator with actuation redundancy considering kinematics and natural frequency[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 80-85.
[25] Pitt E B, Simaan N, Barth E J. An investigation of stiffness modulation limits in a pneumatically actuated parallel robot with actuation redundancy[C]//ASME/BATH 2015 Symposium on Fluid Power and Motion Control. American Society of Mechanical Engineers, 2015: V001T01A063- V001T01A063.
[26] Valá?ek M, Bauma V á, Belda K, et al. Design-by- optimization and control of redundantly actuated parallel kinematics sliding star[J]. Multibody System Dynamics, 2005, 14(3/4): 251-267.
[27] Liang D, Song Y, Sun T, et al. Optimum design of a novel redundantly actuated parallel manipulator with multiple actuation modes for high kinematic and dynamic performance[J]. Nonlinear Dynamics, 2016, 83(1/2): 631-658.
[28] Harada T, Nagase M. Impedance control of a redundantly actuated 3-DOF planar parallel link mechanism using direct drive linear motors[C]//Robotics and Biomimetics (ROBIO), 2010 IEEE International Conference on. IEEE, 2010: 501-506.
[29] Jiang Y, Li T, Wang L. Dynamic modeling and redundant force optimization of a 2-DOF parallel kinematic machine with kinematic redundancy[J]. Robotics and Computer Integrated Manufacturing, 2015, 32: 1-10.
[30] Isaksson M, Gosselin C, Marlow K. An introduction to utilising the redundancy of a kinematically redundant parallel manipulator to operate a gripper[J]. Mechanism and Machine Theory, 2016, 101: 50-59.
Optimal design and kinematics analysis of 5-DOF hybrid serial-parallel manipulator
Zhang Dongsheng1, Xu Yundou1,2, Hou Zhaowei1, Yao Jiantao1,2, Zhao Yongsheng1,2※
(1066004; 2,066004)
In recent years, with the development of various types of intelligent robots, new agricultural robots have become frontier technology in the field of international agricultural machinery. And as the complexity and diversity of the agricultural production and operation, the characteristics of advancement and practicability are needed to add to the agricultural robots. In this paper, in order to increase the automation level of agricultural operations and improve the ability of adapting to different working environments, a novel kinematically redundant planar parallel mechanism (PM) with continuous rotational axis and fewer joints is proposed, which has one rotational degree of freedom (DOF) and 2 translational DOFs (2T1R). For the rotational DOF, the rotational axes of the moving platform are mutually parallel at any position of the whole workspace; for the translational DOFs, the directions are simple horizontal and vertical. This robot has a quite simple structure. As we all know, simple structures of the robot can reduce the manufacturing cost to a great extent. This kinematically redundant planar PM is a metamorphic mechanism. For instant, when the moving platform and the intermediate link are locked, the PM becomes an actuation redundant PM. So this PM can be used to research not only the kinematically redundant property but also the actuation redundant property. Actually, this new type PM can be used in the field of food packaging, seed selection, fruit classification, transport, picking, and so on. For the purpose of improving the robot properties, 15 5-DOF hybrid serial-parallel manipulators are constructed on the basis of this type of planar PM. One of these manipulators is selected to do some analysis in this paper, which is more likely to be applied in agriculture. Firstly, the kinematic model of the 5-DOF hybrid manipulator is established. Especially, the forward and inverse kinematics models show the briefness of this robot. What is worth mentioning is that a simple kinematics model is conducive to realize the control of the robot. And this matches the strategy of robot intelligence. The velocity Jacobian matrix is deduced, the singularity analysis of the PM is done according to the Jacobian matrix, and the conditions for reducing singularity are listed. The concept of singularity degree is defined, which can be used to keep away from mechanism singularity. Then based on the flexibility performance index, the optimal design of the 2T1R planar PM is investigated and the performance atlas is drawn. From the performance atlas, we can choose the physical dimensions of the PM. The 3-dimentional model based on a set of optimal physical dimensions is established. After that, in order to reduce weight without the loss of stiffness, the structural topology optimization is accomplished by means of the finite element software. The analysis and comparison of the whole structure are also carried out. This novel hybrid manipulator has the characteristics of simple structure, simple kinematic model, high stiffness, and high degree of modularity, which provides a very variety of application prospects in the field of agricultural machinery.
robots; design; optimization; planar parallel mechanism; kinematically redundant; degree of freedom; metamorphic mechanism
10.11975/j.issn.1002-6819.2016.24.009
TP242
A
1002-6819(2016)-24-0069-08
2016-05-12
2016-11-17
國家自然科學基金資助項目(51275439);河北省重點基礎研究項目(15961805D);燕山大學青年教師自主研究計劃課題資助項目(13LGA001);河北省研究生創新資助項目(2016SJBS001)
張東勝,男,博士,主要研究方向為并聯機器人理論及其應用。秦皇島 燕山大學河北省并聯機器人與機電系統實驗室,066004。 Email:ysuzds@163.com
趙永生,男,教授,博士生導師,主要研究方向為并聯機器人理論及其應用。秦皇島 燕山大學河北省并聯機器人與機電系統實驗室,066004。Email:yszhao@ysu.edu.cn
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50