基于LabVIEW的旋轉(zhuǎn)倒立擺系統(tǒng)設計
2017-01-07 11:36:41白富斌董君浩侯麗鵬
現(xiàn)代商貿(mào)工業(yè) 2016年9期
白富斌+董君浩+侯麗鵬


摘 要:以LabVIEW為平臺,結(jié)合PID算法,對旋轉(zhuǎn)倒立擺系統(tǒng)設計進行設計研究。
在倒立擺旋轉(zhuǎn)過程中,通過編碼器將判斷位置與角度的相應電信號反饋給上位機,上位機通過運行程序計算并輸出信號進而來控制擺桿的的角度、位置,使倒立擺的擺桿不會下垂。
關鍵詞:旋轉(zhuǎn)倒立擺;PID算法;LabVIEW;反饋調(diào)節(jié)
中圖分類號:TB
文獻標識碼:A
doi:10.19311/j.cnki.1672-3198.2016.09.096
0 引言
倒立擺系統(tǒng)是非線性、強耦合、多變量和自然不穩(wěn)定的系統(tǒng)。在控制過程中,能有效地反映諸如魯棒性、隨動性等許多控制中的關鍵問題,是檢驗各種控制理論的理想模型。因此對倒立擺系統(tǒng)的研究在理論和方法上均有著深遠的意義。
本文中,用增量式旋轉(zhuǎn)編碼器、伺服電機、伺服驅(qū)動器、數(shù)據(jù)采集卡、液晶顯示模塊等制作了一個一級旋轉(zhuǎn)倒立擺系統(tǒng),用PID算法,在LabVIEW中編程,進行控制測試及調(diào)整,最后實現(xiàn)對倒立擺的精準控制。
1 倒立擺系統(tǒng)的電路設計
旋臂一端與伺服電機連接并由伺服電機驅(qū)動,可繞轉(zhuǎn)軸在旋轉(zhuǎn)水平面內(nèi)旋轉(zhuǎn),旋轉(zhuǎn)臂另一端固定有一個旋轉(zhuǎn)編碼器,旋轉(zhuǎn)編碼器連接著擺桿,當旋轉(zhuǎn)臂轉(zhuǎn)動時會帶動擺桿在與編碼器轉(zhuǎn)軸旋轉(zhuǎn)方向內(nèi)旋轉(zhuǎn)。如圖1所示。
2 系統(tǒng)工作原理
編碼器將角位移電壓信號送到控制器,根據(jù)狀態(tài)反饋控制器將此電壓信號輸入LabVIEW前面板中,通過程序計算出相對應的輸出信號,再給PID模塊輸出相應的脈沖信號,發(fā)送給伺服驅(qū)動器,再由伺服驅(qū)動器使電機轉(zhuǎn)動,進而實現(xiàn)對擺桿的控制
3 旋轉(zhuǎn)倒立擺的PID控制算法
控制系統(tǒng)中通過對給定值與反饋值取偏差,然后將偏差的比例、積分、微分,通過線性組合轉(zhuǎn)化為控制量;在連續(xù)控制系統(tǒng)中,PID控制器的輸出u(t)與輸入e(t)之間成比例、積分、微分的關系如下圖2。
其中Kc,Ti,Td分別為比例系數(shù)、積分時間常數(shù)和微分時間常數(shù);T為采樣周期;k采樣序號,k=0,2,……:u(KT)為第k次采樣時刻的計算機輸出值;e(KT)為第k次采樣時刻輸入的偏差值;e(KT-T)為第k次采樣時刻輸入的偏差值。
PID算法的調(diào)試過程的幾個步驟:
(1)把積分和微分歸零,增加比例的參量,使系統(tǒng)產(chǎn)生振蕩;
(2)減少比例的參量,找到振蕩點的臨界值,并做記錄;
(3)增大積分的參量,讓積分參數(shù)去接近事先設定的一個目標值;
(4)當給系統(tǒng)通電之后觀察超調(diào)、振蕩還有穩(wěn)定時間是不是達到了預期的效果;
(5)分析超調(diào)和振蕩的數(shù)據(jù)之后,按照系統(tǒng)的調(diào)試,增加微分參數(shù)的比重。
4 LabVIEW控制以及程序運行流程
NI公司的LabVIEW作為一種圖形化編程語言,使編寫程序代碼圖形化,使編程變得簡單,便于設計編程,調(diào)試,檢查等。
LabVIEW的動態(tài)仿真過程:
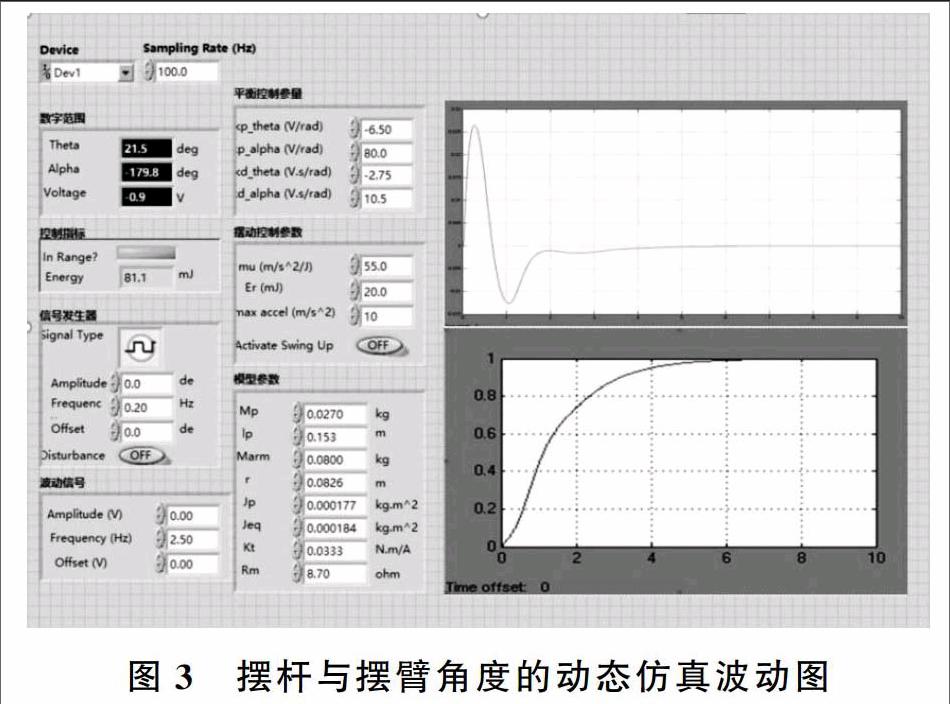
在LabVIEW前面板給定一個電壓值,然后經(jīng)過程序的運行與參數(shù)的調(diào)整,實現(xiàn)對倒立擺系統(tǒng)運行情況的仿真。擺臂角度與擺桿角度的仿真結(jié)果如圖3。
仿真結(jié)果分析:
從仿真結(jié)果可以判定旋轉(zhuǎn)倒立擺能較好的根據(jù)規(guī)定的軌道按照控制信號進行運轉(zhuǎn)的。
從開始到前0.4秒電機的轉(zhuǎn)輪做加速運動,懸臂的轉(zhuǎn)動幅度不斷增大。
在旋臂加速后迅速給其一個制動的信號,使得旋臂的速度能迅速減小,此時擺桿依靠慣性,實現(xiàn)擺桿的倒立。
從第2秒到第5秒,系統(tǒng)變化比較平緩,實現(xiàn)了系統(tǒng)運動的平穩(wěn)。
從第5秒過后,擺臂的擺動角度沒有發(fā)生明顯的改變,系統(tǒng)進入到平衡狀態(tài)。
5 結(jié)論
本文中,以LabVIEW平臺進行編程,實現(xiàn)程序的模塊化,在程序的調(diào)試過程時比較方便;應用編碼器監(jiān)測擺臂的角度,減少了系統(tǒng)滯后帶來的問題。
系統(tǒng)運行結(jié)果表明,倒立擺擺桿從起擺至達到穩(wěn)定狀態(tài)的過程中,通過LabVIEW編的程序和PID控制算法控制的倒立擺,在穩(wěn)定性與抗干擾性上都比較好,最終實現(xiàn)了倒立擺擺桿的倒立。
參考文獻
[1]王紅.基于PID算法的旋轉(zhuǎn)倒立擺系統(tǒng)設計[J].大眾科技,2014,(10).
[2]王招治.基于MATLAB的旋轉(zhuǎn)倒立擺的控制與仿真分析[J].機電技術,2012,(4).