基于RC6—9控制器的雙鋼輪振動壓路機控制系統(tǒng)開發(fā)
2017-01-03 22:48:37張佩王凱
科技傳播 2016年16期
張佩+王凱
摘要本文介紹了雙鋼輪振動壓路機的控制技術(shù),開發(fā)了基于RC6-9控制器的壓路機控制系統(tǒng)。給出了行駛系統(tǒng)、振動系統(tǒng)、灑水系統(tǒng)等關(guān)鍵系統(tǒng)的控制方法及流程;通過模擬試驗,驗證了控制方法的合理性。
關(guān)鍵詞雙鋼輪振動壓路機;控制系統(tǒng);RC6-9控制器
雙鋼輪振動壓路機在作業(yè)過程中存在著很多影響壓實質(zhì)量的問題,比如振動的頻率不穩(wěn)定,系統(tǒng)的壓力沖擊較大等。而目前高頻電控技術(shù)在雙鋼輪振動壓路機上的應(yīng)用在國內(nèi)還處于初級階段,不能充分解決上述問題。本文所研究的雙鋼輪振動壓路機控制技術(shù)針對上述影響壓實質(zhì)量的問題,提出獨有的控制方法,改善壓實質(zhì)量。
1RC6-9控制器簡介
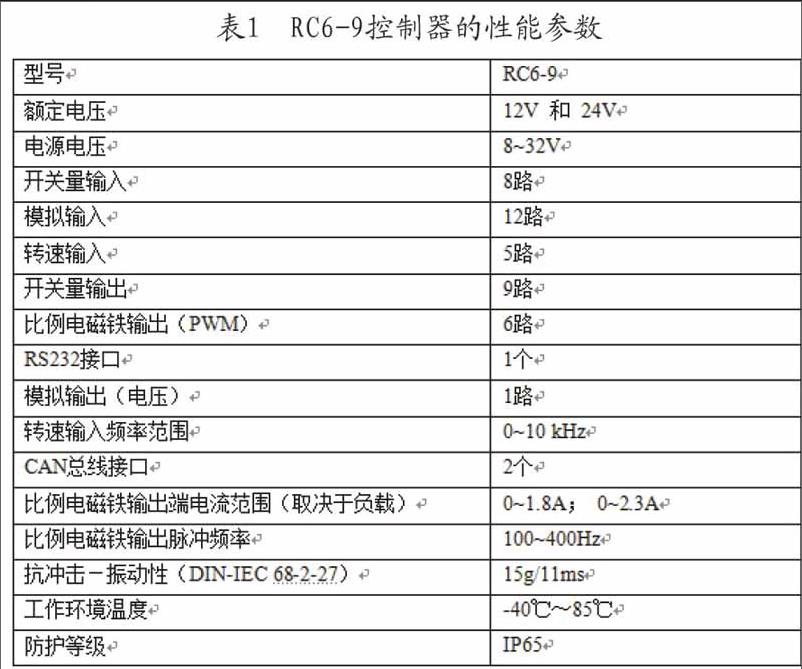
在控制器選擇上,通過縱向橫向比較,最終選擇了以生產(chǎn)液壓元件和相應(yīng)控制器件的博世力士樂公司的RC6-9控制器,作為本文研究樣機的控制器,其性能如表1所示。
2雙鋼輪振動壓路機控制系統(tǒng)設(shè)計
2.1控制系統(tǒng)的總體結(jié)構(gòu)
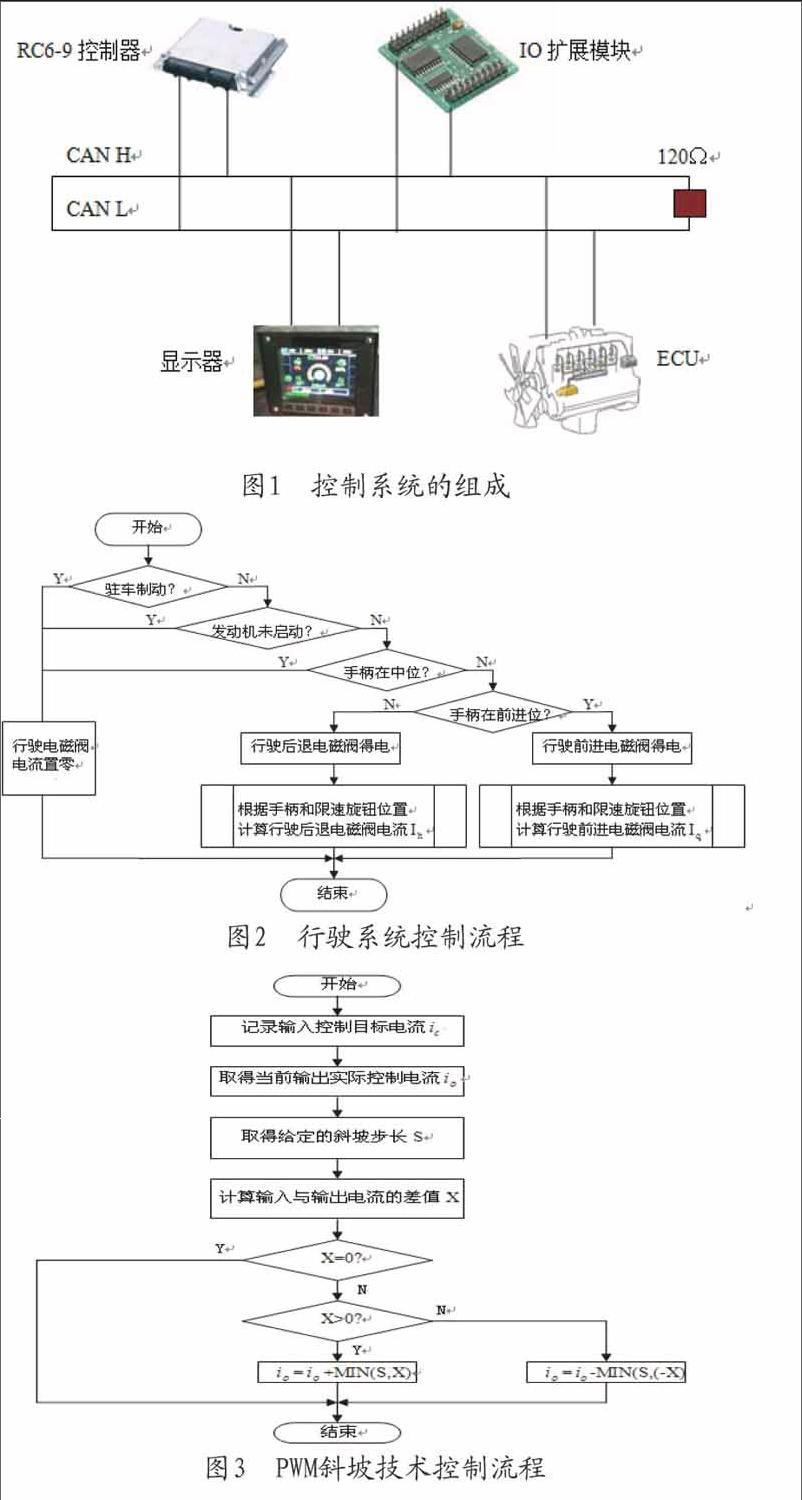
整個控制系統(tǒng)通過CAN總線連接而成。具體的組成如圖1所示。
2.2控制方法研究
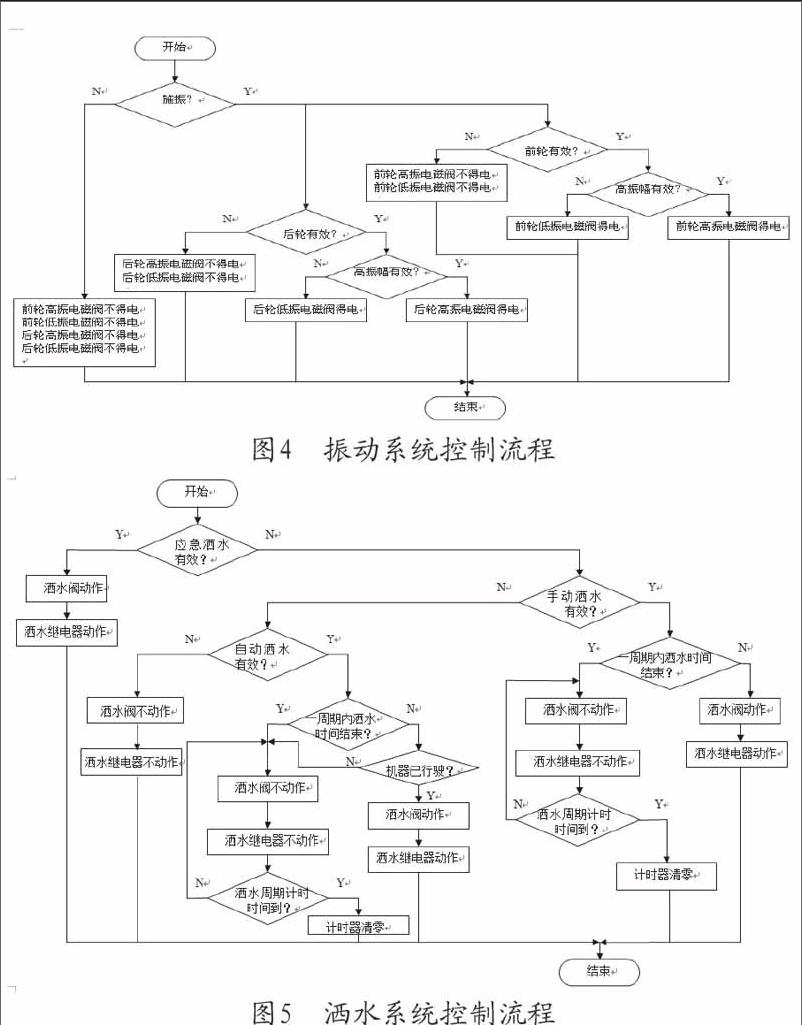
根據(jù)控制系統(tǒng)的功能需求,對行駛系統(tǒng)、振動系統(tǒng)、灑水系統(tǒng)等關(guān)鍵系統(tǒng)的控制方法進行研究,其中圖2為行駛系統(tǒng)的控制流程圖,圖3為PWM斜坡技術(shù)的控制流程圖,圖4為振動系統(tǒng)的控制流程圖,圖5為灑水系統(tǒng)的控制流程圖。
3試驗
3.1試驗?zāi)康?/p>
運用BODAS2.0軟件對控制系統(tǒng)進行模擬調(diào)試,查看是否讀入所有信號,對控制系統(tǒng)功能進行測試,看能否達到預(yù)期目標(biāo)。
3.2試驗主要設(shè)備
試驗的主要設(shè)備:32位輸入輸出試驗板、220v電源、實驗專用Pc機、普通萬用表、CAN總線與Pc機USB連接的轉(zhuǎn)換卡以及RC6-9控制器。具體連接如圖6所示。
3.3試驗的內(nèi)容以及結(jié)果
對樣機進行了模擬調(diào)試,其調(diào)試的主要內(nèi)容以及結(jié)果如表2所示。
3.4模擬實驗結(jié)論
分析模擬實驗的結(jié)果,得出以下結(jié)論:
1)各個輸入輸出信號的參數(shù)設(shè)置較為合理。
2)控制系統(tǒng)各部分工作正常。
3)控制系統(tǒng)的預(yù)設(shè)功能基本得到實現(xiàn)。
4結(jié)論
本文對雙鋼輪振動壓路機進行了控制系統(tǒng)的硬件選型,提出了一些控制方法,并進行了模擬試驗研究,驗證了控制系統(tǒng)功能的合理性。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
電子制作(2018年12期)2018-08-01 00:47:44
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
制造技術(shù)與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
Coco薇(2016年2期)2016-03-22 02:42:52
當(dāng)代化工研究(2016年6期)2016-03-20 16:21:46
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56