模仿呼吸時肺通氣試驗裝置的研制
2016-12-30 02:24:26袁越陽
自動化儀表 2016年12期
嚴 甜 袁越陽
(江蘇省醫療器械檢驗所1,江蘇 南京 225300;蘇州市凱迪醫學科技有限公司2,江蘇 蘇州 215163)
模仿呼吸時肺通氣試驗裝置的研制
嚴 甜1袁越陽2
(江蘇省醫療器械檢驗所1,江蘇 南京 225300;蘇州市凱迪醫學科技有限公司2,江蘇 蘇州 215163)
機械通氣是支持和拯救患者生命的重要方式之一。在實行通氣臨床應用之前,對設備的參數和性能的測定是保證試驗更具安全性和可行性的前提。為了建立能夠模仿呼吸時肺通氣情況的裝置來替代活體肺通氣作為通氣試驗對象,以動物肺為肺通氣模型核心,采用數據處理和驅動控制,研制了一款通過驅動針筒活塞模仿呼吸肌做功產生吸、呼氣流對肺通氣模型進行通氣的試驗裝置。通過比較新鮮羊肺為肺通氣模型模仿呼吸試驗輸出的氣流波形與實測人體呼吸氣流波形,證明了所建試驗裝置的通氣氣流波形特征與實測人體呼吸氣流波形特征相一致。
傳感器 醫療器械 機械通氣 肺通氣 通氣模型 標定 光電隔音 流量
0 引言
隨著人類大氣環境受到塵埃、廢氣等污染,有關呼吸道疾病的發病率逐年上升。據統計,受到我國自然環境變化和人口老齡化等因素的影響,每年不同程度的呼吸疾病患者大約有8 000萬。而在治療這類疾病(如塵肺病、COPD、ARDS等)時,機械通氣(主要是呼吸機)受到廣大醫務人員和患者的關注和青睞[1-2]。對機械通氣設備和通氣模式的市場需求,也不斷激發研究人員、生產廠家為之投入更多精力進行研究、開發和生產。與此同時,對通氣設備的評估方式和測定方法也有更高的要求。
目前,在臨床和應用各種機械通氣設備之前,評估和測定各種通氣時主要采用的裝置是機械模擬肺[3-5]。機械模擬肺采用一種具有彈性的、類似氣瓤或風箱的部件來替代活體肺,這是實現模仿呼吸通氣功能的關鍵部分。這種替代肺的部件通常只能線性地反映各種呼吸參數,如氣道阻力、肺順應性等。而這類參數在實際活體上往往呈現出非線性的動態變化[6-7]。為了更加真實地反映活體呼吸特征,在測定中既要提高對通氣設備輸出的要求,又要避免直接活體臨床帶來的風險,采用新鮮動物肺來模仿呼吸肺通氣活動并對通氣設備進行測試驗證,不失為一種行之有效的方式。為此,提出并設計了一種以動物尸源性肺為肺通氣物理模型的試驗裝置。
1 試驗方式
試驗平臺主要包括信號采集和處理裝置、肺通氣物理模型、能模仿呼吸肌做功的針筒及活塞驅動裝置。試驗平臺結構如圖1所示。
系統實現模仿呼吸肺通氣的核心部件是肺通氣物理模型。在人頭模具內置入模仿人體上氣道的彎曲普通樹脂呼吸管路(管路長約為30 cm,直徑為22 mm,內置一氣阻,在流量為20 L/min時氣阻值約為2 cmH2O,接近人體上氣道氣阻[8]),該呼吸管路向下伸入密封的塑料桶內并通過轉接頭與動物肺相連。該轉接頭內含有壓力傳感器和流量傳感器,用于測量肺部的氣流和氣壓。利用密封的塑料桶(壓力為40 cmH2O時,漏氣流<0.5 L/min)來模仿具有支撐作用的胸腔。桶壁上開孔通過另一根標準呼吸管路(長約為1.8 m,直徑為22 mm)與活塞式針筒(最大容量為2 L)輸出口相連接。通過活塞運動來模仿呼吸做功并產生“胸腔”內與外部大氣的壓力差。壓力和流量采樣管(橡膠軟管,孔徑為2 mm)通過置于桶壁的采樣接頭與氣道內傳感器輸出口和“胸腔”相通。

圖1 試驗平臺結構圖
Fig.1 Diagram of experimental platform
模擬呼吸操作流程如圖2所示。吸氣時,向外拉活塞,抽取“胸腔”內的空氣使“胸腔”內形成相對外部大氣的負壓。在此負壓驅動下,氣流被吸入肺部,且直到負壓力消失處于吸氣末狀態。呼氣時,松開活塞或向內輕推回活塞(平衡活塞與筒壁之間的摩擦),肺在自身彈性力的作用下逐漸恢復原狀并進入待吸氣前狀態,此時活塞內空氣被排入“胸腔”,使“胸腔”內負壓逐漸升高到不低于外部大氣壓,從而確保肺內空氣排入大氣。

圖2 模擬呼吸操作流程圖
Fig.2 Process of breathing simulation
當該壓力差消失后,進入呼氣末狀態等待下一個呼吸循環[9]。活塞驅動裝置可以采用人工手動驅動或電控驅動。前者便于模仿實際呼吸時的隨意性;而后者主要是在交流電機的驅動下,通過減速齒輪箱和力矩傳動機構來驅動活塞運動來模仿穩定的肺通氣。
多路數據采集盒內主要包括信號處理電路、與外部電腦進行數據通信的USB接口及驅動、電源處理電路。信號處理電路如圖3所示。傳感器(氣壓傳感器和流量傳感器)把收集到的氣流、氣壓信號轉換為模擬電信號;模擬信號通過信號整形、濾波后,經模數轉換電路轉換為數字信號;利用數字信號只有高低電平的特點,采用光電隔離技術,保證數據處理器得到的數字信號完全與傳感器端的模擬信號隔離;數據經處理器運算處理后,通過USB接口上傳到個人計算機等設備。

圖3 多路信號處理電路框圖
Fig.3 Block diagram of the multi-channel signal processing circuitry
2 參數標定
從傳感器上傳的數據在沒有進行數據分析處理之前,只是簡單的電壓信號,并無實際意義,不能真實地反映呼吸氣流的流量和壓力。因此,采用TSI公司生產的TSI-4040型流量計來標定裝置的流量,并結合臺灣衡欣公司生產的AZ8252數字壓力計,來標定裝置的壓力。圖4和圖5分別是流量傳感器和壓力傳感器上傳的電壓值及與之相對應的實際流量和壓力曲線圖(相對大氣壓)。

圖4 流量-電壓標定曲線圖
Fig.4 Flow-voltage calibration curve

圖5 壓力-電壓標定曲線圖
Fig.5 Pressure-voltage calibration curve
對圖4和圖5中數據進行擬合,可得流量Q、氣壓P與傳感器輸出電壓值U之間的數學關系滿足式(1)(擬合優度R>0.99)。
(1)
式中:u∈[0,5],V;Q為流量,L/min;P為氣壓,cmH2O(厘米水柱,1 cmH2O≈98 Pa)。
3 試驗與分析
在試驗裝置的“胸腔”內,分別置入替代左右兩肺的2個羊肺(記為1#,羊的質量約為30 kg)、2個標準氣瓤(1 L,廠家標定順應性為20 ml/cmH2O)或另外2個羊肺(記為2#,羊的質量約為25 kg)后,用手緩慢推拉或電控驅動針筒活塞模仿呼吸動作。
在推拉活塞做功的情況下,產生的肺通氣量和胸內壓的相關曲線試驗結果如圖6所示。
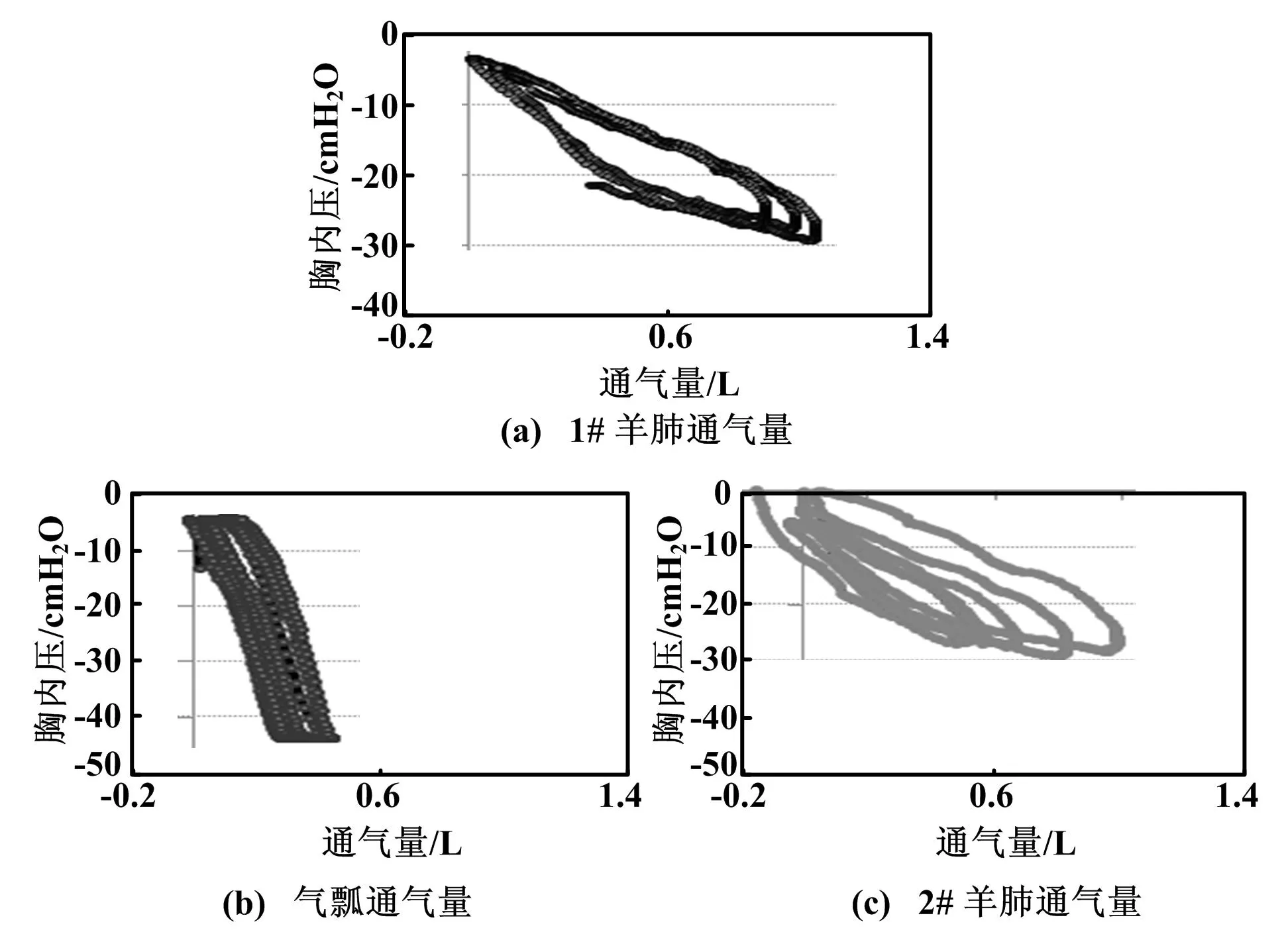
圖6 試驗結果圖
Fig.6 Test results
圖6中,數據采樣頻率為50 Hz。試驗結果表明,標準氣瓤在更大壓力作用下卻產生比羊肺更小的肺通氣量;采用氣瓤時的通氣量-胸內壓曲線也比采用羊肺時的更趨近于線性變化。
圖7為利用2#羊肺和電控驅動活塞模仿正常人呼吸時所測得的呼吸氣流曲線。通過驅動活塞來控制“胸腔”內的壓力,滿足式(2)的要求[10]。
(2)
式中:Pmus為在t時刻驅動活塞所產生的胸內壓;T、TI分別為呼吸周期和吸氣時間;Pmax為最大呼吸用力所對應的胸內壓;λ為待定時間常數。當試驗取Pmax≈23 cmH2O、TI=1.8 s、T=3.75 s(呼吸頻率16次/min)和λ=0.8 s時,所得圖7(b)中實線所示的模仿呼吸氣流曲線與虛線所示的正常成人的平均特征曲線(數據來源12個健康成年人:體重為50~75 kg,身高為155~180 cm,年齡為20~60歲)相近,且兩者相似度[11]大于0.95。

圖7 電控模仿呼吸輸出曲線圖
Fig.7 The simulated respiratory flow output
under motor driver
目前,用于機械通氣設備性能評價和醫務人員技能學習與培訓的設備主要還是采用類似于Ingmar Medical的ASL5000之類的機械模擬肺。它們往往是通過對具有一定彈性(或順應性)的氣瓤進行充氣、放氣來實現其“呼吸通氣”功能。根據以上試驗結果,采用所述裝置和動物新鮮肺來模仿呼吸通氣功能更能體現肺通氣的特征。另外,由于裝置更接近真實呼吸肺通氣的優點,用其檢測機械通氣設備(如呼吸機),將有利于提高對機械通氣設備輸出參數和性能的驗證。
4 結束語
本文設計了一種試驗用肺通氣試驗裝置,并采用標準的氣瓤(夾板肺)和新鮮羊肺為試驗對象,模仿了呼吸時的肺通氣試驗。試驗所得的“呼吸”氣流波形特征與實際測試的呼吸氣流波形之間的相似度大于95%。該裝置為今后的通氣試驗提供了更接近于采用活體進行通氣試驗的條件。
[1] 王保國,周建新.實用呼吸機治療學[M].北京:人民衛生出版社,2015:10.
[2] PAVWELS R A,BUIST A S,CALVERLEY P M.Global strategy for the diagnosis,management,and prevention of chronic obstructive pulmonary disease:GOLD executive summary[J].American Journal of Respiratory and Critical Care Medicine,2007,187(176):532-555.
[3] 劉曉梅,徐琳媛,魏立峰,等.主動模擬肺平臺的設計和研究[J].自動化儀表,2013,34(2):34-37.
[4] 易韋韋,張玘,王躍科,等.基于主動模擬肺通氣模式試驗平臺的設計與實現[J].電子測量與儀器學報,2009,23(5):92-96.
[5] 姬軍,張鵬,蔣昌松,等.無創呼吸機質量狀況調查及質量控制檢測平臺初步研究[J].中國醫學裝備,2012,9(2):27-31.
[6] 薛立超,趙嘉訓.胸肺順應性的監測[J].實用醫技雜志,2010,5(5):441-443.
[7] BARBINI P,CEVENINI G,AVANZOLINI G.Nonlinear mechanisms determining expiratory flow limitation in mechanical ventilation:a model-based interpretation[J].Annals of Biomedical Engineering,2003,31(8):908-916.
[8] ROBINSON R W,WHITE D P,ZWILLICH C W.Moderate alcohol ingestion increases upper airway resistance in normal subjects[J].American Review of Respiratory Disease,1985,132(6):1238-1241.
[9] 朱大年,吳博威,樊小力.生理學[M].北京:人民衛生出版社,2008:132-163.
[10]YAMADA Y,DU H L.Analysis of the mechanisms of expiratory asynchrony in pressure support ventilation:a mathematical approach[J].Journal of Applied Physiology,2000,88(6):2143-2150.
[11]陳大力,沈巖濤,謝檳竹,等.基于余弦相似度模型的最佳教練遴選算法[J].東北大學學報(自然科學版),2015,35(12):1697-1700.
Research and Development of the Experimental Device for Simulating Respiratory Lung Ventilation
Mechanical ventilation is one of the important ways to support and save the lives of patients. Before carrying out the clinical application of ventilation, to ensure that the test is more safe and feasible, the prerequisite is determining the parameters and performance of equipment. In order to build the device that can emulate respiratory lung ventilation to substitute living lung ventilation, the lung of animal is used as the model kernel of the lung ventilation; through data processing and driving control, an experimental device for ventilation is developed. In this device, the syringe piston is driven to emulate the acting of respiratory muscle, for producing the airflow of suction and exhalation; then the lung ventilation model is ventilated. The experiment is conducted using fresh sheep lung, the output waveform is compared with the waveform of the measured human respiratory airflow; the result indicates that the features of ventilation airflow waveform of experimental device built are consistent with the features of measured respiratory airflow waveform of human body.
Sensor Medical instrument Mechanical ventilation Lung ventilation Ventilation model Calibration Optoelectronic isolotion Flow
嚴甜(1988—),女,2010年畢業于南京郵電大學生物醫學工程專業,獲學士學位,工程師;主要從事醫療器械測試與測試裝置及方法的研究。
TH6;TP3
A
10.16086/j.cnki.issn 1000-0380.201612010
修改稿收到日期:2016-03-07。