危險氣體罐車液位計算機視覺監控識別報警系統設計
2016-12-26 15:42:37李嘉賢李燁
現代電子技術 2016年22期
李嘉賢+李燁


摘 要: 在計算機視覺環境下,對危險氣體罐車液位的檢測識別,保障車輛運輸安全。結合視覺圖像處理技術,采用嵌入式超聲無損檢測方法,進行危險氣體罐車液位計算機視覺監控識別報警系統設計。首先進行液位檢測原理分析,構建系統裝置的總體結構模型,進行危險氣體罐車液位計算機視覺監控識別報警系統的硬件模塊化設計和軟件設計,設計了計算機視覺監控識別報警系統的超聲信號A/D采樣電路、時鐘電路、濾波電路、程序加載電路和電源電路。基于計算機視覺監測方法,進行危險氣體罐車液位內部狀態特征的視覺監測。實驗結果表明,該系統具有較好的液位檢測性能,實現危險氣體罐車液位的有效監控識別與報警,性能可靠穩定。
關鍵詞: 危險氣體罐車; 液位檢測; 計算機視覺; 報警系統
中圖分類號: TN948.64?34; TP216 文獻標識碼: A 文章編號: 1004?373X(2016)22?0067?0
0 引 言
隨著自動化測試技術的發展,采用智能測試和計算機視覺方法進行液位檢測和監控,借助的物理場有超聲波、微波雷達、射線及激光等,能實現高低位報警功能,在工業控制場合中,固定位置處的液位監控是保障工業控制安全的重要技術,特別是在危險光車的運輸過程中,需要對危險氣體罐車的液位進行實時監控和識別,通過感應元件實現對液位的準確檢測,通過檢測發射和接收的時延來確定液位的高度。隨著計算機視覺處理技術的發展,以及圖像處理技術的應用,采用計算機視覺部監控方法進行危險氣體罐車的液位監控識別成為未來實現液位準確監測和定位的重要發展方向,研究基于計算機視覺的危險罐車的液位檢測監控報警系統,在保障危險罐車運輸安全方面具有重要意義,相關的系統設計方法受到人們的重視[1?3]。
目前,對液位的檢測方法按照測量液位的感應元件與被測液體是否接觸,其可分為接觸型和非接觸型兩大類。通過人工檢尺法[4?6],加裝浮子測量裝置進行液位檢測,微波雷達、射線及激光主要是應用在檢測罐體為危險物質,將微波發射器和接收器安裝在罐頂,利用超聲技術并結合數字信號處理算法進行液位檢測[7?9]。但是,上述設計方案因無法找到超聲信號為零的位置,所以考慮使用靈敏度相同的另一液位檢測傳感器作為參考通道進行自適應噪聲抵消,參考液位檢測傳感器應放置在對目標反射信號較小,更多的反映液位反射的超聲信號的位置,但是對電磁波、光波等超聲無法穿過的介質,液位檢測的精度不高[10],難以實現有效的監控識別和報警。針對上述問題,本文進行危險氣體罐車液位監控識別報警系統的改進設計,首先進行了液位檢測原理分析,構建系統裝置的總體結構模型,然后進行了危險氣體罐車液位計算機視覺監控識別報警系統的硬件模塊化設計和軟件設計,最后通過實驗分析驗證了本文設計的液位監控識別報警系統的優越性能,得出有效性結論。
1 液位計算機視覺監控識別報警系統的總體設計
根據上述液位檢測弊端分析,進行危險氣體罐車液位計算機視覺監控識別報警系統設計,首先分析系統設計的總體架構模型,系統設計包括了系統的硬件設計和軟件設計部分。硬件設計中,主要是在計算機視覺環境下完成液位視覺特征的獲取,并對接收到的視覺特征進行相應的處理。本系統的硬件部分主要是數據采集和數字信號處理。接收探頭采集的視覺特征通過信號采集電路進行高分辨率的A/D采樣,液位視覺的差異性可以通過對分辨率和采樣率的大小來判斷。在對液位檢測的超聲信號檢測的基礎上,設計自適應濾波器進行信號濾波,通過自適應均衡方法得到基于視覺傳感器的液位檢測特征,為系統設計提供了準確的數據基礎。因此,采集電路的設計必須采用高分辨率,硬件電路設計中,包括確定DSP處理器型號、Visual DSP++集成開發環境、外圍器件以及連接關系。根據I/O設備的數據采集量確定液位監控識別系統的分辨率和基線恢復性能,采用ADI公司的ADSP21160處理器系統作為計算機視覺監控識別的主控芯片,數字信號處理器主要完成對整個硬件系統的電路控制,根據設計的功能指標得到本文設計的監控系統的計算機視覺的像素值的系統最低采樣率為1 024 MHz, 則DSP的最低速度應大于[25×20=500 MHz]。
在進行罐體液位監控中,研究的罐體的厚度分別為5 mm平面罐體,20 mm平面罐體。由于本文構建的系統是一個高采樣率的數據采集系統,在進行液位監控識別報警中,需要利用C8051F處理器發射頻率為120 kHz左右的脈沖序列,作為原始聲信號數據存入計算機系統,以此進行監控識別,根據上述描述,得到系統設計的模塊構架如圖1所示。
2 系統的設計與實現
2.1 硬件電路設計的指標分析
在上述進行了危險氣體罐車液位計算機視覺監控識別報警系統的液位檢測原理分析和系統設計總體構建描述的基礎上,進行系統的硬件設計,系統的硬件模塊主要包括了超聲信號A/D采樣電路、時鐘電路、濾波電路、程序加載電路和電源電路等。系統的設計指標描述如下:
(1) 危險氣體罐車液位計算機視覺監控識別報警系統的輸出信號幅度<2 dB,脈沖信號的頻譜寬度為12 dB;
(2) 監控系統的整體功耗<2 W;
(3) 計算機視覺監控接收機采樣率不低于12 MHz;
(4) CAN總線對無液狀態采集數據采樣分辨率不低于8位;
(5) 有液狀態采集數據中具有高壓控制功能;
(6) 具有基線恢復功能。
根據上述設計的指標,進行硬件模塊化設計。
2.2 系統硬件模塊化設計與電路實現
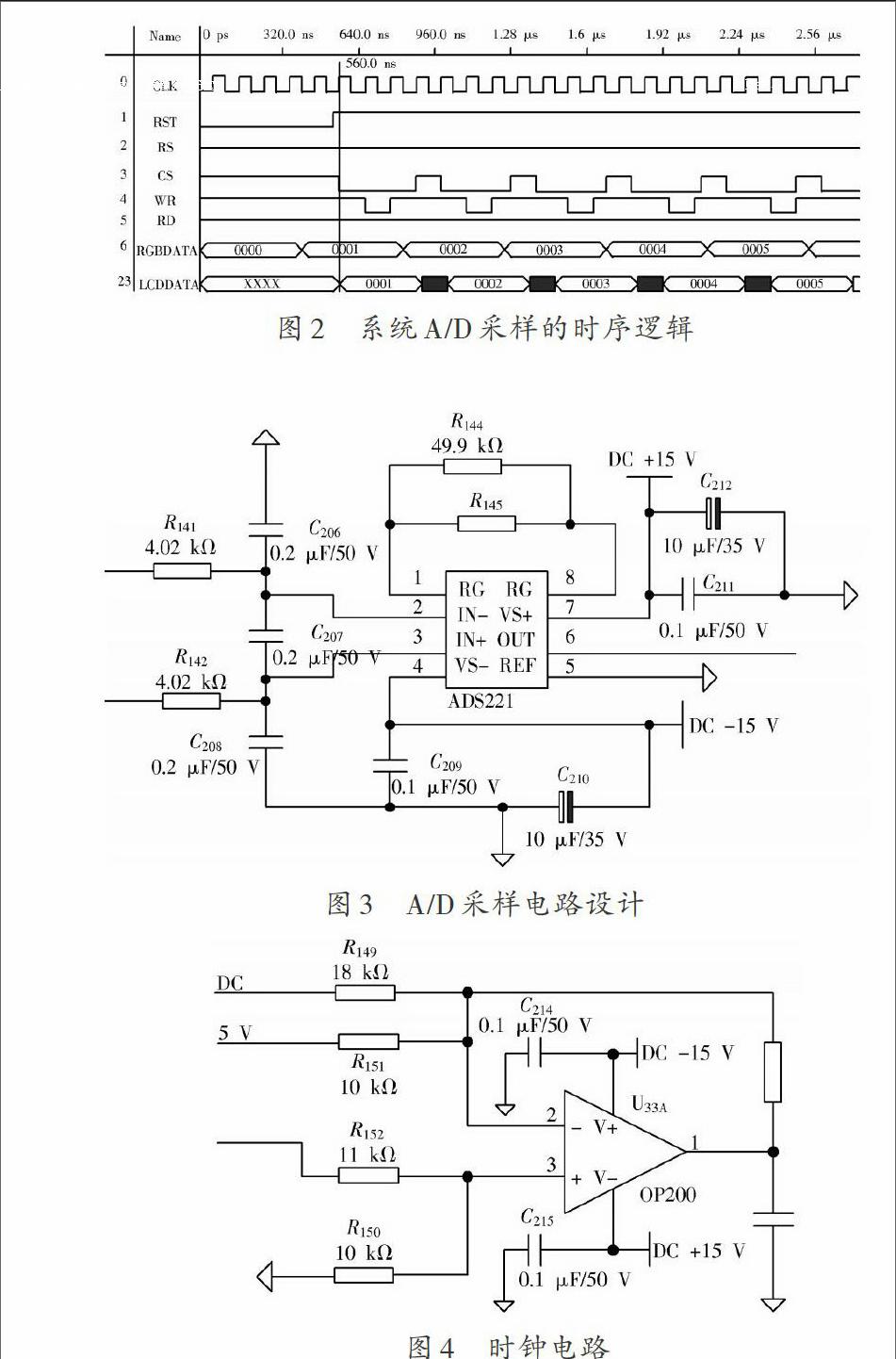
首先設計圖像信號A/D采樣電路,A/D采樣電路是實現罐車液位計算機視覺監控識別報警系統設計的基礎,通過A/D采樣電路上傳圖譜數據,使用AD公司一款高性能A/D芯片AD9225對上一個緩沖區數據進行峰值檢測,利用A/D芯片內的采樣保持器和參考電壓進行計算機視覺特征監測和液位脈沖數據采樣,結合視覺特征在危險氣體罐車中傳播可以進行信號轉換,通過A/D采樣電路轉化為計算機視覺監控系統能識別的數字信號,A/D芯片通過時鐘把脈沖信息輸入到罐體液位監測系統的中央處理單元,數字輸出包括12位數字輸出和一個溢出指示位,采用多樣化的數據捕捉和傳送模式,罐車液位計算機視覺監控識別報警系統的PPI的所有操作與A/D、D/A轉換器、視頻編碼/解碼器進行并行串口通信,由此實現控制信號的無幀同步、內部觸發。根據上述設計,得到罐車液位計算機視覺監控識別報警系統A/D采樣的時序邏輯如圖2所示。
罐車液位計算機視覺監控識別報警系統的輸入超聲信號采用的是單端輸入,耦合方式可以是交流耦合,通過上述邏輯結構,構建A/D采樣電路如圖3所示。
<系統的時鐘電路是實現計算機視覺監控的模擬控制,通過發射時鐘脈沖信號,實現液位監測的基線輸入,系統的時鐘電路由電壓信號控制,控制電壓0~5 V,采用LDAC信號將超聲脈沖信號鎖存在內部寄存器,復位信號通過危險氣體罐車液位檢測系統輸入的參考信號對有液和無液的狀態進行區別檢測,通過手動按鍵,采用計算機視覺監測方法,進行危險氣體罐車液位內部狀態特征的視覺監測,時鐘電路的VCC電壓低于2.32 V時,按下開關S1后,LED會被點亮,危險氣體罐車液位檢測的計算機視覺檢測端具有醒目的提示,通過上述分析,得到系統的時鐘電路如圖4所示。
圖4中,WDO引腳產生的超聲波將發生反射縱波(或橫波),利用多層介質中超聲波的傳播規律進行計算機視覺監控識別,實現對罐體液位狀態的檢測。
2.3 軟件算法的設計
由于是單峰液位突變特征,因此,可結合角點檢測的特點,利用Harris角點檢測方法能夠實現丙烯聚合過程中非正常液位的檢測和識別。角點能夠描述液位圖像中兩個邊緣的相交點,Harris角點檢測方法主要通過液位圖像中的特征點形狀進行非正常液位的檢測和識別,即使液位的顏色發生變化仍能進行有效的檢測。
設置液位圖像[I(x,y)],對其進行平移[(Δx,Δy)]后圖像具有自相似性,這種自相似性能夠用自相關函數進行評價,其公式如下:
[c(x,y;Δx,Δy)=(u,v)∈W(x,y)ω(u,v)[I(u,v)-I(u+Δx,v+Δy)]2] (1)
式中:[W(x,y)]為以[(x,y)]為中心模板的窗口;[ω(u,v)]為加權函數,可以將其設置為常數或者高斯函數。對泰勒公式進行展開,能夠得到:
[I(u+Δx,v+Δy)≈I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy =I(u,v)+[Ix(u,v)Iy(u,v)]ΔxΔy] (2)
則:
[c(x,y;Δx,Δy)=ω(u,v)[I(u,v)-I(u+Δx,v+Δy)]2 ≈[Ix(u,v)Iy(u,v)]ΔxΔy2ω(u,v) =[Δx,Δy]M(x,y)ΔxΔyω(u,v)](3)式中:
[M(x,y)=Ix(u,v)2Ix(u,v)Iy(u,v)Ix(u,v)Iy(u,v)Iy(u,v)2=ACCB] (4)
因此,對液位圖像進行平移后得到的自相關函數能夠近似于下述二次項函數:
[c(x,y;Δx,Δy)≈[Δx,Δy]M(x,y)ΔxΔy] (5)
進而能夠得到丙烯聚合過程中液位的視覺方程:
[Δx,ΔyM(x,y)ΔxΔy=1] (6)
圖像中液位圖像的尺寸是由[M]矩陣的特征值決定的,特征值能描述液位圖像中灰度變化的速度和方向。Harris角點法無需對[M]的特征值進行計算,只要計算出一個角點的響應即可,其計算公式如下:
[R=detM-α(traceM)2] (7)
式中,[α]為經驗參數,通常取值為0.04~0.06。利用上述方法取得的全部Harris角點,計算全部的角點縱坐標的均值進行計算即可得到實際的液位高度,從而實現丙烯聚合過程中非正常液位的準確檢測與識別。
3 系統軟件開發仿真環境描述和系統調試結果分析
危險氣體罐車液位計算機視覺監控識別報警系統的軟件開發建立在嵌入式Linux開發系統基礎上,系統軟件需要實現的功能包括危險氣體罐車液位超聲采集、能譜測量、計算機視覺圖像控制、CAN通信以及A/D采樣E2PROM燒寫。SPI E2PROM AT25HP512用于DSP的程序加載,正確配置DSP的SPI寄存器,采用DIP封裝實現程序加載,根據上述軟件開發環境,發送WREN指令直接通過燒寫器燒寫,進行危險氣體罐車液位計算機視覺監控識別報警系統的仿真測試。首先采用層次聚類方法在計算機視覺環境下進行液位狀態數據采集,然后進行信號轉換,得到有液狀態和無液狀態下的采集結果如圖5所示。
對上述原始數據進行信號處理,采用自適應濾波電路進行有用信息提取,得到提取結果如圖6所示。
監控識別,由圖6可見,采用本文設計的系統進行危險氣體罐車的液位檢測,在計算機視覺下能實時準確檢測液位值,實現準確的監控識別和報警,性能可靠穩定。
4 結 語
本文進行了危險氣體罐車液位計算機視覺監控識別報警系統優化設計,利用不同液位狀態下聲波在不同罐體環境中的傳播特征的差異性,進行聲波在不同罐體環境中的傳播的差異性特征提取,判定液位狀態。進行系統的硬件設計和軟件設計,包括A/D采樣電路、時鐘電路、濾波電路、程序加載電路和電源電路等。通過危險氣體罐車液位檢測系統輸入的參考信號對有液和無液的狀態進行區別檢測,采用計算機視覺監測方法,進行危險氣體罐車液位內部狀態特征的視覺監測。研究表明,該系統具有較好的液位檢測性能,實現危險氣體罐車液位的有效監控識別報警,具有較好的應用價值。
參考文獻
[1] 劉茂旭,何怡剛,鄧芳明,等.融合RFID的無線濕度傳感器節點設計研究[J].電子測量與儀器學報,2015,29(8):1171?1178.
[2] 呂富勇,周瑞卿,阮世陽,等.高頻磁場檢測中采樣保持器的設計及其性能分析[J].電子測量技術,2015,38(8):13?16.
[3] 郭靜波,譚博,蔡雄.基于反相雙峰指數模型的微弱瞬態極低頻信號的估計與檢測[J].儀器儀表學報,2015,36(8):1682?1691.
[4] JAFAR S A. Interference alignment: A new look at signal dimensions in a communication network [J]. Foundations and trends in communications and information theory, 2011, 7(1): 129?134.
[5] GOMA/DAM K, CA/DAMBE V R, JAFAR S A. A distributed numerical approach to interference alignment and applications to wireless interference networks [J]. IEEE transactions on information theory, 2011, 57(6): 3309?3322.
[6] PATCHARAMANEEPAKRON P, ARMOUR S, DOUFEXI A. Coordinated beamforming schemes based on modified signal?to? leakage?plus?noise ratio precoding designs [J]. IET communications, 2015, 9(4): 558?567.
[7] KALEVA J, TOLLI A, JUNTTI M. Weighted sum rate maximization for interfering broadcast channel via successive convex approximation [C]// Proceedings of IEEE Global Communications Conference. Anaheim, USA: IEEE, 2012: 3838?3843.
[8] LIU H, DING Z G, FAN P Z, et al. Precoding design for interference suppression in multi?cell multi?user networks [J]. IET communications, 2014, 8(9): 1534?1540.
[9] RATHEESH M, DAVID M J. System?level performance of interference alignment [J]. IEEE transactions on wireless communications, 2015, 14(2): 1060?1070.
[10] 趙石磊,郭紅,劉宇鵬.基于軌跡跟蹤的線性時滯系統容錯控制[J].信息與控制,2015,44(4):469?473.
[11] KARAMI E,DOBRE O A. Identification of SM?OFDM and AL?OFDM signals based on their second?order cyclostationarity [J]. IEEE transactions on vehicular technology, 2015, 64(3): 942?953.
