雙軸旋轉捷聯慣導的誤差參數標定方法
2016-12-22 06:35:02王昆明謝建周召發趙典
西安交通大學學報 2016年10期
關鍵詞:系統
王昆明,謝建,周召發,趙典
(1.火箭軍工程大學兵器發射理論與技術國家重點學科實驗室,710025,西安;2.中國人民解放軍96113部隊,116105,遼寧大連)
?
雙軸旋轉捷聯慣導的誤差參數標定方法
王昆明1,謝建1,周召發1,趙典2
(1.火箭軍工程大學兵器發射理論與技術國家重點學科實驗室,710025,西安;2.中國人民解放軍96113部隊,116105,遼寧大連)
針對目前的雙軸旋轉調制捷聯慣導系統誤差標定方法參數標定不全、速度較慢的問題,提出一種新的雙軸旋轉調制捷聯慣導系統誤差參數標定方法,以實現全參數、快速標定,從而進行誤差補償以有效提升慣導系統導航精度。首先通過研究雙軸旋轉捷聯慣導系統誤差補償的基本原理和系統機械結構,推導了初始時刻內、外軸處于任意角度情況下的陀螺誤差方程;而后在對狀態方程進行可觀測性分析的基礎上,設計了標定路徑;最后通過濾波獲取標定參數結果。該標定方法無需外部基準,僅通過系統自身旋轉機構即可快速實現對陀螺誤差全參數標定,彌補了之前方法只能標定部分參數的缺點,且有效縮短了標定時間,仿真結果表明,相比之前方法需要幾十分鐘的標定時間,該方法只要在6 min內即可實現陀螺全參數標定,是一種快速有效的標定方案。
捷聯慣導系統;旋轉調制;系統級標定;可觀測性分析;全參數
捷聯慣性導航系統(strapdown inertial navigation system,SINS)是一種自主導航定位系統,可以連續地提供包括姿態基準在內的全部導航參數,具有非常好的短期精度和穩定性,目前已被廣泛應用于航天、航空、艦艇、導彈武器、地面車輛等載體上,但該系統的主要缺點是由于器件誤差的存在,導致導航定位誤差隨時間而不斷積累。解決這一問題的方法就是慣導系統誤差標定技術。標定技術的目的是通過一定方法及設備來確定慣性器件的數學模型及其參數,而后根據標定結果對慣性器件誤差進行補償,從而有效地提高慣性系統導航定位精度。目前通常的標定方法是采用多軸轉臺或載體運動來提供誤差激勵。采用多軸轉臺,則慣組只能在實驗室條件下進行標定;而采用載體運動激勵,則要求載體必須以規定動作運動,不僅過程復雜,而且往往由于載體運動方式限制,導致只能標定部分誤差[1]。
目前捷聯慣導系統的一個重要趨勢是旋轉調制技術,通過增加轉位機構,利用機構的旋轉,實現部分器件誤差的調制抵消。整體看來,慣性器件誤差引起的導航姿態角誤差和速度誤差被調制成周期性震蕩誤差,而不會隨著時間發散[2-4]。旋轉調制捷聯慣導增加了轉位機構,就相當于提供了轉臺,這就使不依靠外界轉臺等條件而實現自主標定成為可能。對于單軸旋轉調制系統,由于僅提供了一個旋轉自由度,無法完全激勵分離出所有誤差參數,而雙軸旋轉捷聯慣導系統內的雙軸轉位機構就相當于雙軸速率轉臺,可以提供更多的姿態和角速度激勵,從而實現慣性器件誤差的全參數標定。這樣一來,研究雙軸旋轉捷聯慣導系統的自主標定方法,對于補償減小慣性器件誤差、提高系統導航定位精度從而最終提升載體定位性能就具有十分重要的意義。
近年來,針對雙軸旋轉捷聯慣導系統的標定方法,國內外學者進行了很多研究:文獻[5]提出一種雙軸旋轉捷聯慣導八位置標定方法,可實現姿態未知條件下的誤差標定,但其采用地球自轉角速度來激勵陀螺安裝誤差及標度因數,導致標定時間過長;文獻[6]采用可觀測性分析方法,對文獻[5]類的八位置標定方法進行了優化,提升了標定速度;文獻[7]提出了一種雙軸旋轉捷聯慣導系統工程實現方案,并對其系統誤差特性進行了分析及仿真,提出了一種系統級自標校方案,實現了部分誤差的估計補償;文獻[8]分析了雙軸旋轉式SINS誤差傳播特性,并利用奇異值分解法對系統的可觀測程度進行了分析,據此設計了系統的自主標定方案及濾波算法,但其無法標定與陀螺z軸相關的誤差;文獻[9]設計了一種雙軸旋轉調制系統多位置編排方案,可以標定除了3個安裝誤差外的所有其余誤差,但其要求轉位步驟多,方案編排較為復雜。
針對目前方法標定速度較慢、標定參數不全的問題,本文在上述文獻基礎上,推導了初始框架為任意角度下的雙軸旋轉捷聯慣導陀螺誤差公式,并據此建立了狀態方程,通過可觀測性分析提出了一種新的系統級標定方案,實現了全部陀螺參數的標定,最后通過仿真驗證了方法的有效性。
1 坐標系定義
(1)導航坐標系(n系):該坐標系隨地球的自轉和載體的運動相對慣性系運動,本文采用東-北-天導航坐標系。
(2)載體坐標系(b系):該坐標系與基座固聯,定義當轉位機構位于轉角零位時,Oxb與外環軸重合,Ozb與內環軸重合,Oxb指向基座的右方,Oyb與Oxb、Ozb成右手直角坐標系。
(3)慣性器件敏感坐標系(s系):該坐標系的原點位于慣性敏感元件中心,當轉位機構位于轉角零位時,s系與b系對應坐標軸重合。
(4)初始慣性器件敏感坐標系(s0系):初始時刻的慣性器件敏感坐標系。
2 雙軸旋轉捷聯慣導系統陀螺的誤差方程
雙軸旋轉捷聯慣導系統一般采用如圖1所示的機械結構。

圖1 雙軸旋轉系統機械結構圖[3]

(1)
式中:θsx、θsz分別為s系下外、內軸旋轉角度,可通過測角機構測出。
定義陀螺輸出角速度誤差模型為[11-12]
(2)

(3)
(4)
(5)
對于旋轉捷聯慣導系統,有
(6)

將式(6)代入式(2),有
(7)


(8)
由于初始時刻雙軸轉位機構姿態一般不在轉角零位,為不失一般性,考慮內、外軸處于任意角度下的情況。
(1)當慣組繞轉位機構內軸旋轉時,s系到b系的轉換矩陣為
(9)

(10)

(11)

(12)
將式(12)代入式(8),可得
(13)
式中:X1=(-θgxysinθsx0+θgxzcosθsx0)cosθszωsz-(Kgysinθsx0ωsz-θgyzcosθsx0)sinθszωsz;X2=(-θgxysinθsx0+θgxzcosθsx0)sinθszωsz+(Kgysinθsx0ωsz-θgyzcosθsx0)cosθszωsz;X3=θgzysinθsx0ωsz+Kgzcosθsx0ωsz。
可見繞內軸旋轉時,可以激勵與y、z軸陀螺相關的誤差系數,而無法激勵與x軸陀螺相關的誤差系數Kgx、θgyx、θgzx。這是由于系統繞內軸旋轉時,慣組x軸方向上沒有角速度輸入,因而無法對相關誤差實施激勵。文獻[7]相當于設定了初始時刻θsx0=0,則式(13)退化為文獻[7]中式(6),導致與y軸陀螺相關的誤差系數Kgy、θgxy、θgzy不可觀測。故為保證參數可激勵,應使sinθsx0值及cosθsx0值不為零或小值以避免無法標定或誤差過大。
(2)當慣組繞轉位機構外軸旋轉時,有
(14)
(15)
(16)
式中:Y1=Kgxcosθsz0ωsx+θgxysinθsz0ωsx;Y2=(-Kgycosθsx+θgzysinθsx)sinθsz0ωsx+(θgyxcosθsx+θgzxsinθsx)cosθsz0ωsx;Y3=(-Kgysinθsx-θgzycosθsx)sinθsz0ωsx+(θgyxsinθsx-θgzxcosθsx)cosθsz0ωsx。
當系統繞外軸旋轉時,與z軸陀螺相關的誤差系數Kgz、θgxz、θgyz無法激勵。為保證與x軸陀螺相關的誤差系數可激勵,應使θsz0值不為90°及270°以及二者附近的值。
可見,設定合理的初始角度情況下,慣組分別繞轉位機構內、外軸旋轉時,所有的陀螺參數都可以得到耦合。
綜上,雙軸旋轉調制技術引入的旋轉角速率可以有效激勵陀螺安裝誤差和標度因數誤差,靜基座下,載體本身的角速率及零偏等對系統安裝誤差和標度因數誤差的作用相對轉位機構旋轉角速率的作用很小,可以忽略。設置不同的初始角度和轉位方案,可分別激勵出3個陀螺的誤差參數。
3 可觀測性分析
系統級標定之前,為確保參數可標定,首先要進行可觀測性分析,進而確定參數標定路徑。接下來建立系統誤差狀態方程。
3.1 狀態方程
本文主要考慮陀螺誤差,對于加速度計,暫不考慮安裝誤差及標度因數誤差,只考慮常值零偏,則加速度計輸出誤差可表示為
(17)
已知靜基座條件下捷聯慣導系統的姿態和速度誤差模型為
(18)
(19)
根據上述的陀螺及加速度計誤差模型,可得出捷聯慣導系統15階誤差狀態方程為

(20)
式中
X=[φEφNφUΔVEΔVNΔVUKgyKgz
(21)
其中φE、φN、φU為姿態誤差角φ在東、北、天方向的分量;
(22)
其中
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
3.2 基于分段線性定常系統方法的可觀測分析
可觀測性分析是進行系統級標定的必要條件之一,只有保證誤差狀態量可觀測,標定時卡爾曼濾波器才能收斂,而且收斂的時間和精度取決于系統的可觀測度,可觀測度越高,標定效果越好。此外,標定路徑也是依據可觀測性分析設計的。下面就根據分段線性定常系統(piece-wise constant system,PWCS)可觀測性分析方法進行可觀測性分析。
雙軸旋轉捷聯慣導系統本質上是一個線性時變系統,通過PWCS分析方法,將系統在不同時間區間內看成是線性定常系統,并利用提取可觀測矩陣(stripped observability matrix,SOM)對系統可觀性進行分析,結果如下。
當慣組繞轉位機構內軸旋轉時,對SOM矩陣進行可觀測性分析可知:在單一位置,勻速繞內軸旋轉時,系統SOM矩陣的秩都為9,系統不完全可觀;第2時間段,改變轉速ωsz,則系統SOM矩陣的秩上升為12,仍不完全可觀,且增加時間段,繼續改變ωsz,SOM矩陣的秩保持12不變;若在上述基礎上改變θsx0,則系統SOM矩陣的秩上升為15,系統完全可觀。可見,通過設置內、外軸不同轉位方式,即可實現對參數的估計。
這里要注意,若θsx0改變180°,則SOM矩陣的秩降為12,這可以從分析式(3)得出:θsx0改變180°,則式(3)中與y、z軸陀螺相關的誤差系數大小不變,但符號同時改變,導致SOM矩陣對應行線性相關,矩陣的秩下降。為保證參數可觀,θsx0改變量應避開180°及其附近值。采用相同分析方法,當慣組繞轉位機構外軸旋轉時,也可得出相同結論。
3.3 標定路徑分析
由上述可觀測性分析可以得出陀螺誤差標定路徑,以內軸為例說明如下。
首先控制內軸旋轉,即提供轉速激勵,然后反向旋轉,相當于改變轉速ωsz,而后繞外軸轉過一定角度,即改變θsx0,內軸繼續保持正、反轉,重復上述步驟直至誤差得到估計,這樣就完成了標定路徑設計。
由于陀螺誤差方程(3)、(6)中并不包含陀螺常值漂移ε,為將其標定出來,可利用雙軸轉位機構,采用二位置方法對其進行標定,標定方法如下。
對式(2)所得的陀螺安裝誤差進行補償后,在靜止位置有
(31)
繞內軸旋轉時,令初始位置為位置1,內軸轉過一定角度后停止于位置2,在位置1時,s0系到s系的姿態矩陣為
(32)
位置1的陀螺輸出角速度為
(33)
在位置2時,s0系到s系的姿態矩陣為
(34)
位置2的陀螺輸出角速度為
(35)
聯立以上4式可解出陀螺常值零漂εx、εy分別為
(36)
(37)
同理,繞外軸旋轉時,可解出陀螺常值零漂為
(38)
可見,根據式(36)~式(38),可由2個位置時的陀螺輸出角速度計算出陀螺常值零漂。由于陀螺常值漂移很小,要適量延長陀螺采樣時間,通過誤差累加以提高標定精度。
4 系統級誤差標定及仿真
4.1 標定方法
下面將根據雙軸旋轉調制慣導系統的實際情況,根據上節的標定路徑,設計了一套外場條件下的系統級標定方案,標定過程如下:
(1)測定內、外軸初始角度值θsz0、θsx0,若為前述特殊角度范圍,則控制轉位機構轉動相應轉軸45°以避開范圍,并以轉位后的角度作為初始角度值;
(2)進行粗對準,約2 min;
(3)控制內軸轉位機構進行勻速180°正反轉,同時進行導航及標定濾波計算;
(4)內軸停轉,靜止10 min,進行陀螺零漂及加速度計零偏標定;
(5)外軸轉位45°,轉位時只進行導航計算;
(6)重復步驟3、5,直至完成相應參數標定;
(7)交換內、外軸轉位方式,按照步驟3到6的順序標定相應參數。
4.2 仿真標定及分析
為驗證標定效果,采用MATLAB環境進行仿真標定。在仿真慣性器件信息之前,先對標定模型參數進行設置。地理緯度取為L=34.246°,重力加速度取為g=9.801 665 m/s2,為不失一般性,設置初始姿態角為(10°,20°,30°),內、外軸初始角度值θsz0=120°、θsx0=30°;初始姿態對準誤差取中等精度慣組靜基座對準誤差(1′,1′,4′),加速度計零偏均設置為9.8×10-4m/s2,隨機噪聲均設置為9.8×10-5m/s2;陀螺零漂均設置為0.01(°)/h,隨機噪聲均設置為0.001(°)/h,安裝誤差及標度因數誤差矩陣分別設置為
(39)
(40)
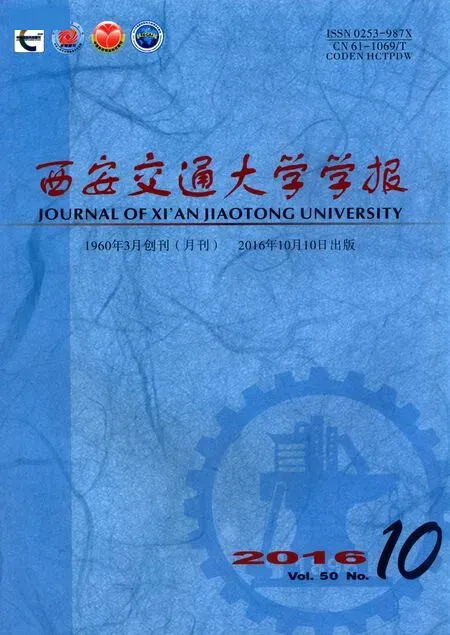
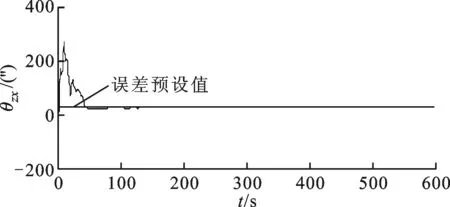
轉位方式采用上節給出的方案,轉速為1 r/min,通過仿真實驗,給出了陀螺標誤差估計曲線,結果分別如圖2到圖7中曲線所示,對比的直線為誤差預設值。圖2、圖3為標度因數誤差估計曲線,圖4、圖5為安裝誤差估計曲線,圖6、圖7為3個加速度計零偏估計曲線。

圖2 Kgx誤差估計曲線
所有參數具體的標定結果如表1所示。
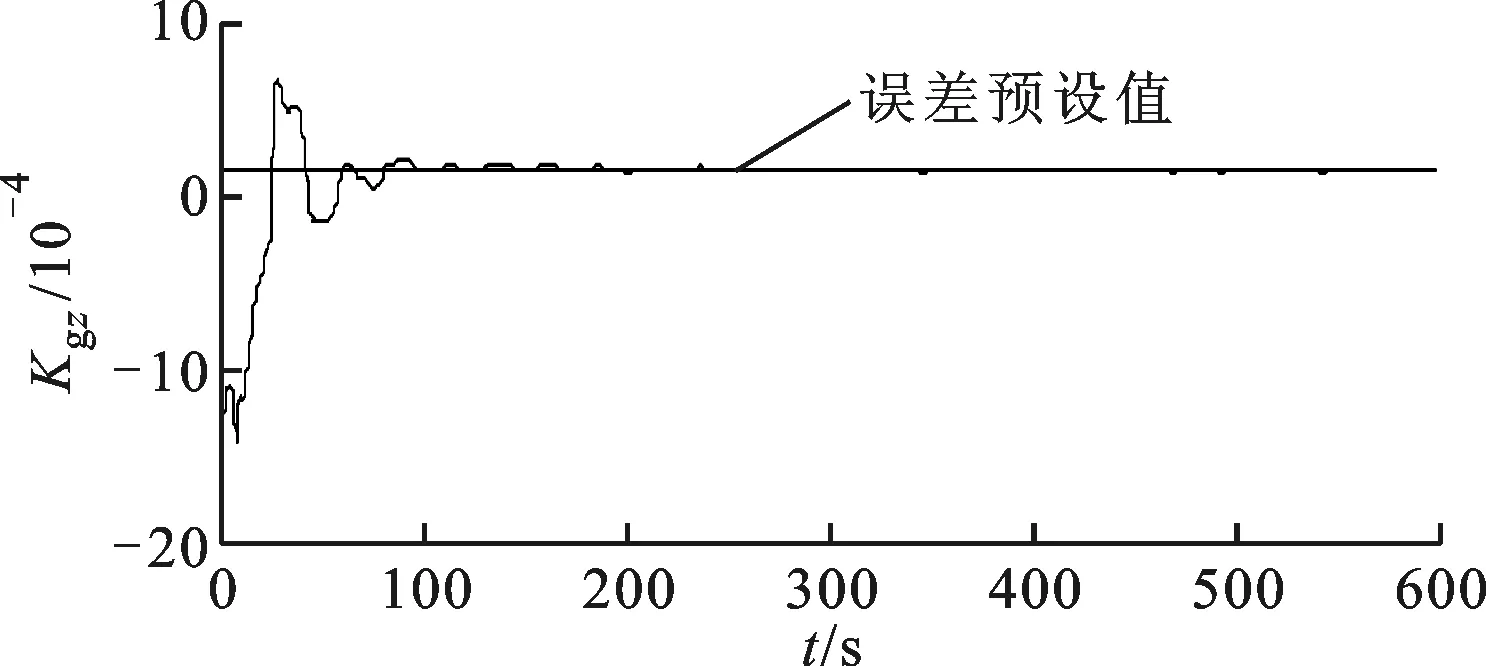
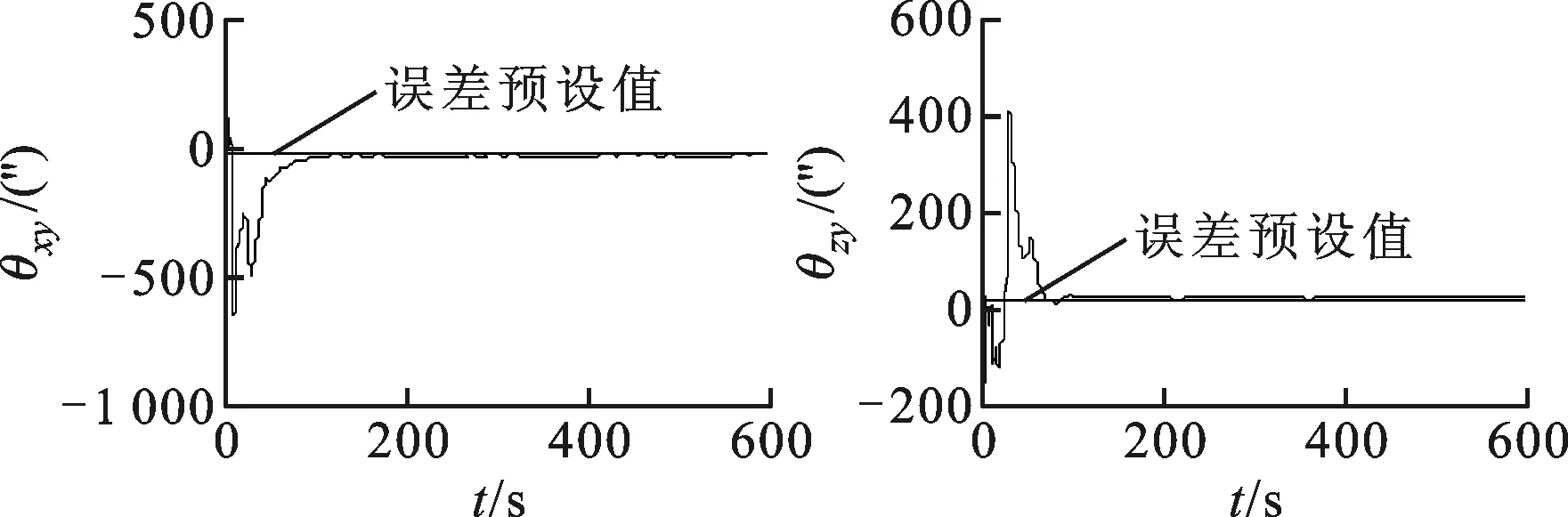
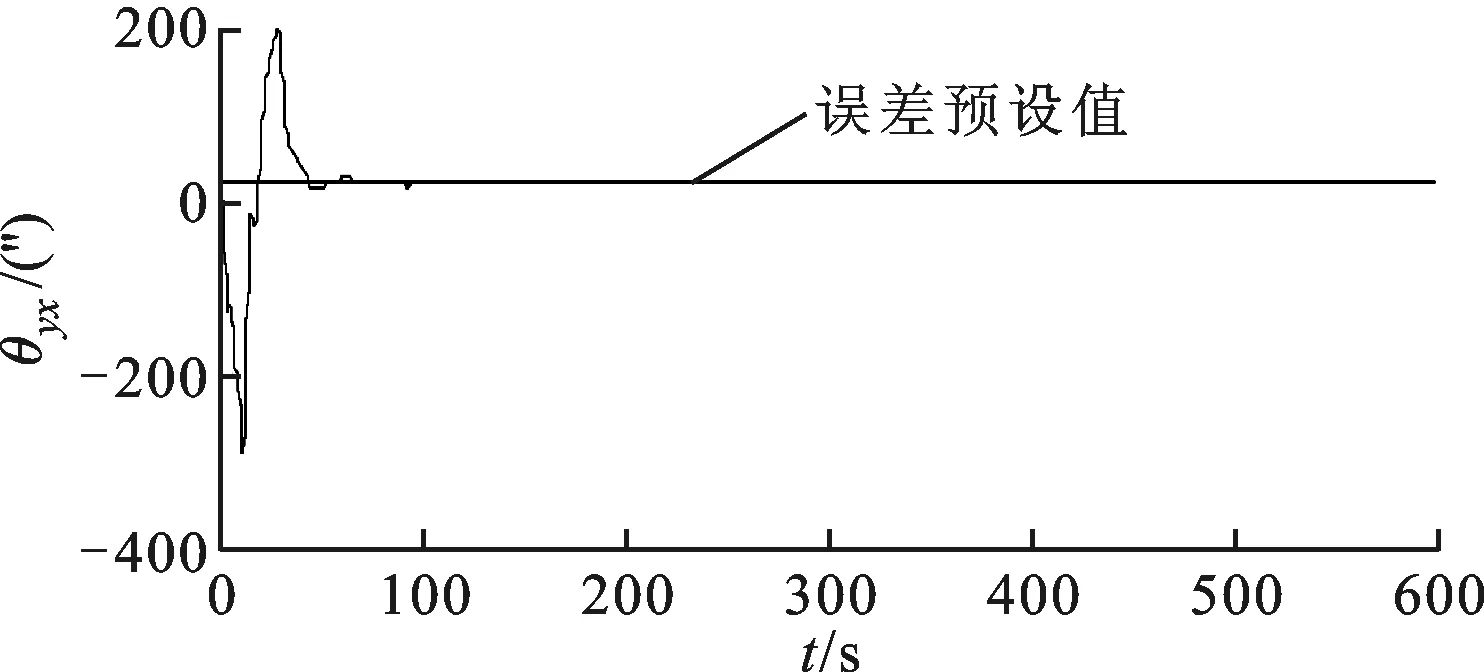
由標定曲線可看出,加速度計零偏及陀螺標度因數誤差標定效果較好,分別于100 s、200 s內即收斂到真值附近。陀螺安裝誤差收斂速度稍慢,也在350 s左右收斂至真值附近。相對于文獻[7]中Kgz、θgxz、θgyz不可標定,本文設計的方法實現了陀螺全部參數的標定,相對于文獻[5]中采用較小的地球自轉角速度激勵,導致每個固定位置停頓長達15 min,標定耗時過長,而本文方法采用轉位機構轉動激勵,從而大大增強了激勵效果,提升了標定速度。

(a)Kgy
(b)Kgz圖3 Kgy、Kgz誤差估計曲線
(a)θgxy (b)θgzy

(c)θgxz (d)θgyz 圖4 θgxy、θgzy、θgxz、θgyz誤差估計曲線
(a)θgyx
(b)θgzx圖5 θgyx、θgzx誤差估計曲線
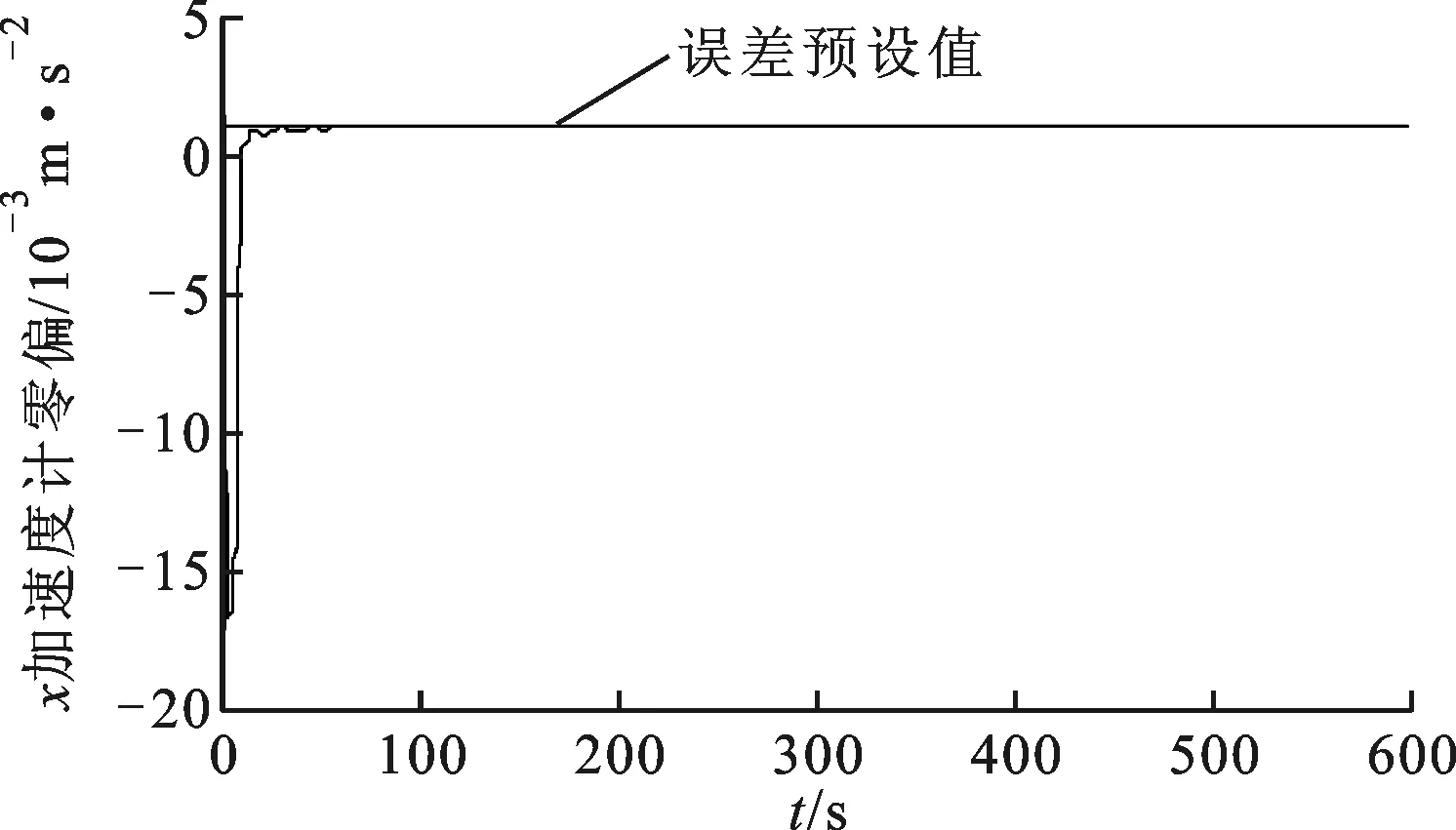
圖6 y、x誤差估計曲線

(a)y、y
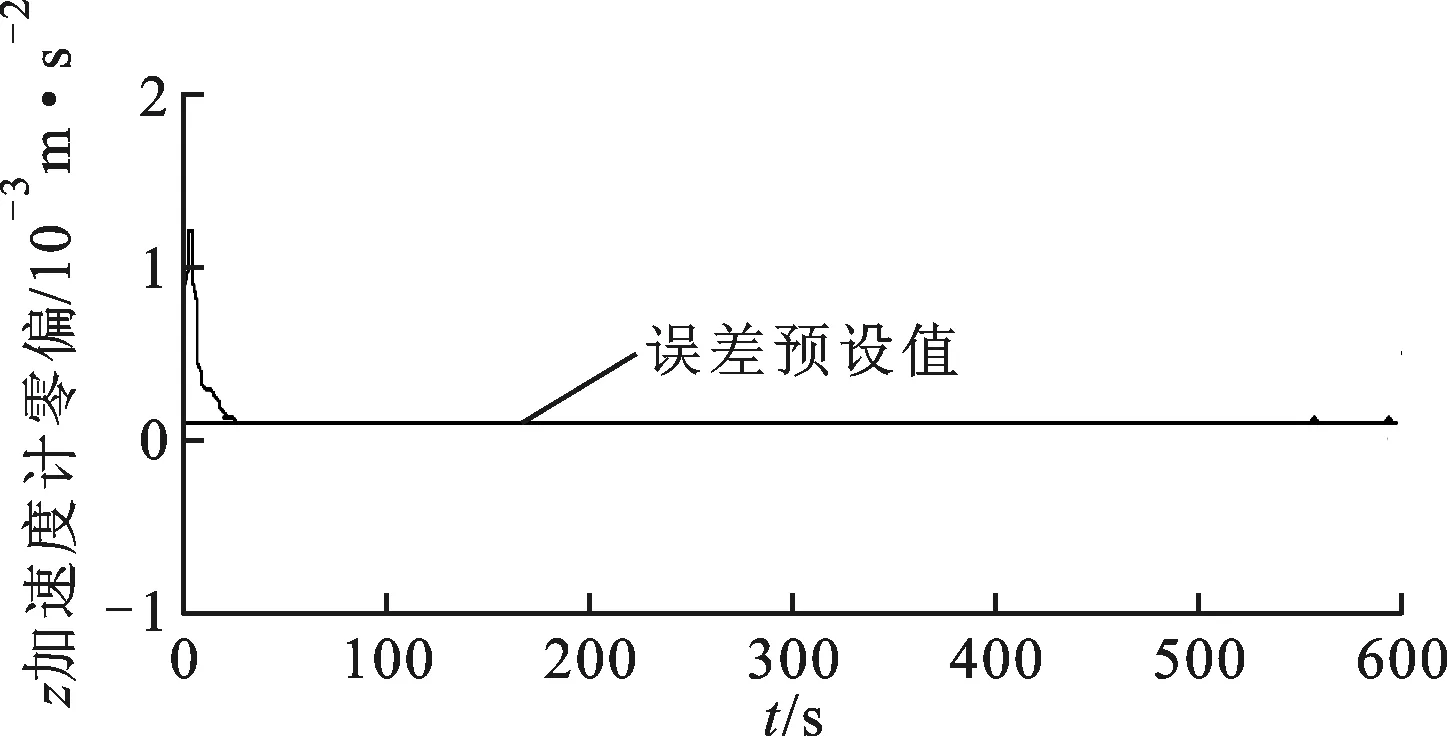
(b)y、z圖7 y、z誤差估計曲線
從表1可以看出,仿真值和真值相比,最大誤差在7%以內,精度較高。

表1 標定結果
5 結 論
雙軸旋轉捷聯慣導系統可由內部的雙軸轉位機構提供不同姿態,實現對慣性器件誤差的充分激勵,從而實現的自主標定。根據這一特點,本文在分析雙軸旋轉捷聯慣導系統機械結構基礎上,通過可觀測性分析,設計了一種新的系統級標定方案,無需外部基準,通過系統自身旋轉機構即可實現對陀螺全部參數的標定,具有較強的工程意義。本課題組下一步的工作重點是研究如何將本文方法具體應用到雙軸旋轉調制捷聯慣導系統,解決濾波參數調整、抗干擾等問題,以實現外場條件下的陀螺誤差快速自標定。
[1] 楊曉霞, 黃一. 利用ESO和TD進行的激光捷聯慣組誤差參數外場標定方法 [J]. 中國慣性技術學報, 2010, 18(1): 2-9. YANG Xiaoxia, HUANG Yi. Application of ESO and TD to outer field calibration of laser gyro SINS [J]. Journal of Chinese Inertial Technology, 2010, 18(1): 2-9.
[2] LEVISION E, TER H J, WILLCOCKS M. The next generation marine inertial navigator is here now [C]∥IEEE Position Location and Navigation Symposium. Piscataway, NJ, USA: IEEE, 1994: 121-127.
[3] LAHHAM J I, WIGENT D J, COLEMAN A L. Tuned support structure for structure-borne noise reduction of inertial navigator with dithered ring laser gyros (RLG) [C]∥IEEE Position Location and Navigation Symposium. Piscataway, NJ, USA: IEEE, 2000: 419-428.
[4] 袁保倫. 四頻激光陀螺旋轉式導航系統研究 [D]. 長沙: 國防科學技術大學, 2007: 71-80.
[5] 孫偉, 徐愛功, 孫楓. 雙軸旋轉光纖捷聯慣導八位置標定方法 [J]. 控制與決策, 2012, 27(12): 1805-1809. SUN Wei, XU Aigong, SUN Feng. Calibration method of eight position for two-axis indexing fiber SINS [J]. Control and Decision, 2012, 27(12): 1805-1809.
[6] GAO Wei, ZHANG Ya, WANG Jianguo. Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems [J]. Sensors, 2015, 15(2): 3154-3171.
[7] 陸志東, 王曉斌. 系統級雙軸旋轉調制捷聯慣導誤差分析及標校 [J]. 中國慣性技術學報, 2010, 18(2): 135-141. LU Zhidong, WANG Xiaobin. Error analysis and calibration of systematic dual-axis rotation-modulating SINS [J]. Journal of Chinese Inertial Technology, 2010, 18(2): 135-141.
[8] 黃鳳榮, 侯斌, 孫偉強, 等. 雙軸旋轉式SINS自主標定技術 [J]. 中國慣性技術學報, 2012, 20(2): 146-151. HUANG Feng-rong, HOU Bin, SUN Wei-qiang, et al. Self-calibration for dual-axis rotary SINS [J]. Journal of Chinese Inertial Technology, 2012, 20(2): 146-151.
[9] 魏國. 二頻機抖激光陀螺雙軸旋轉慣性導航系統若干關鍵技術研究 [D]. 長沙: 國防科學技術大學, 2013: 66-74.
[10]秦永元. 慣性導航 [M]. 北京: 科學出版社, 2006:
35-37.
[11]祝燕華, 蔡體菁. 旋轉式光纖捷聯慣導系統的誤差效應分析 [J]. 中國慣性技術學報, 2011, 19(2): 140-144. ZHU Yan-hua, CAI Ti-jing. Error analysis of rotating strapdown inertial navigation system based on FOG [J]. Journal of Chinese Inertial Technology, 2011, 19(2): 140-144.
[12]李仁, 陳希軍, 曾慶雙. 旋轉式捷聯慣導系統誤差分析 [J]. 哈爾濱工業大學學報, 2010, 42(3): 368-372. LI Ren, CHEN Xijun, ZENG Qingshuang. Error analysis of rotating strapdown inertial navigation system [J]. Journal of Harbin Institute of Technology 2010, 42(3): 368-372.
(編輯 劉楊)
A Calibration Method of Error Parameters for Dual-Axial Rotary Strapdown Inertial Navigation Systems
WANG Kunming1,XIE Jian1,ZHOU Zhaofa1,ZHAO Dian2
(1. State Key Discipline Laboratory of Armament Launch Theory and Technology, Rocket Force Engineering University, Xi’an 710025, China; 2. Unit 96113 of the PLA, Dalian, Liaoning 116105, China)
A new systematic calibration method is proposed to solve the problems that current modulate methods can only modulate parts of parameters of dual-axis rotary modulation strapdown inertial navigation systems and their speeds are slow, and to realize the fast self-calibration of all gyroscopes errors of dual-axis rotary modulation strapdown inertial navigation systems The method compensates errors to improve the accuracy of navigation systems. At first, it is based on the error compensation fundamental and mechanical structure of dual-axis rotation SINS that equations of gyroscopes errors are deduced when both the inside and outside axes are in any direction at initial time. Then, the calibration route is designed through observability analysis, and dimension error parameters are finally acquired by filter. The method can rapidly calibrate all gyroscopes errors by just using the self rotating mechanism without external standard. The method overcomes the shortages of existing methods that only calibrate part of all parameters, and cuts down calibration time effectively. Simulation results show that the method realizes the calibration of all parameters of gyroscopes errors just in 6 minutes while existing methods cost tens of minutes to calibrate, and that the method is fast and feasible.
strapdown inertial navigation system; rotary modulation; systematic calibration; observability analysis; all parameters
2016-01-19。
王昆明(1988—),男,博士生;謝建(通信作者),男,教授,博士生導師。
國家自然科學基金資助項目(41174162)。
時間:2016-07-21
http:∥www.cnki.net/kcms/detail/61.1069.T.20160721.2214.010.html
10.7652/xjtuxb201610023
U666.1
A
0253-987X(2016)10-0153-08
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32