直線超聲波電動機嵌入式機器人手指驅動實驗研究
2016-12-20 05:18:44章成武李朝東
微特電機 2016年9期
章成武,張 露,李朝東
(上海大學,上海 200072)
?
直線超聲波電動機嵌入式機器人手指驅動實驗研究
章成武,張 露,李朝東
(上海大學,上海 200072)
首先介紹了臥板式直線超聲波電動機的結構和工作原理,按照嵌入驅動的思路進行了一款二指機械手的機構設計和受力分析,制作了樣機。經過實驗考察了該機械手的夾持物體能力,驗證了臥板式直線型超聲波電動機應用在機器人手指上的可行性。
壓電超聲波直線電動機;嵌入式驅動;二指機械手;機構設計;搓捏動作
0 引 言
目前常用的機器人大多采用電磁式伺服電機、氣動或液動等裝置來驅動末端執行器。比如日本研制的Okada機械手[1],它采用了電機驅動,此機械手的運動和力傳遞是通過鋼絲繩和滑輪來實現的。另外,還有美國斯坦福大學研制的STD/JPL[2]多指靈巧手,它的每個手指關節的驅動都是由電機通過繩索來完成的。當驅動器采用電機配備減速齒輪箱時,其優點是它能安裝在各種類型的機械臂上;缺點是把此類驅動器安置在手指內時,機械手尺寸會受到限制,也存在著能量損耗等影響。當采用遠端鋼絲繩驅動關節時,其優點是可利用高功率的驅動器產生大的驅動力;缺點是響應速度相比直接驅動變慢。
隨著新型功能材料不斷出現,采用壓電超聲波電動機成為一種新的機器人關節驅動解決方案。超聲波電動機具有以下顯著特點[3]:(1)結構緊湊,設計靈活,轉矩密度大;(2)通過超聲波電動機來實現直接驅動,可以顯著地提高系統的定位精度和加快響應速度;(3)若壓電材料和摩擦材料選用合適,可在高、低溫等極端環境下工作。因此,若采用超聲波電動機驅動機器人關節,可將其全部置于手掌內,形成獨立的手部結構。另外,它可直接驅動機械手關節,改善關節驅動性能。
機器人關節采用超聲波電動機驅動的最大意義在于:它可大大地簡化機器人關節的結構,使其變得輕便、更緊湊,從而改善機器人的動力學性能[4]。因此,本文探索了臥板式超聲波直線電動機在機械手關節驅動中的可能性。首先介紹了其結構和原理,然后試制了一款機械手樣機,最終通過實驗完成了筆套夾持實驗,驗證了超聲波電動機驅動機械手的可行性。
1 電機的結構及工作原理
1.1 電機的結構
文中選用的為本實驗室設計的一種駐波型臥板式壓電直線超聲波電動機,最佳工作頻率為64 kHz,工作電壓峰峰值為150 V。其輪廓結構如圖1所示[5],外形尺寸為長36 mm,寬5 mm,高4 mm。中間為鋁合金材質彈性體,彈性體上下表面分別粘貼有壓電陶瓷。
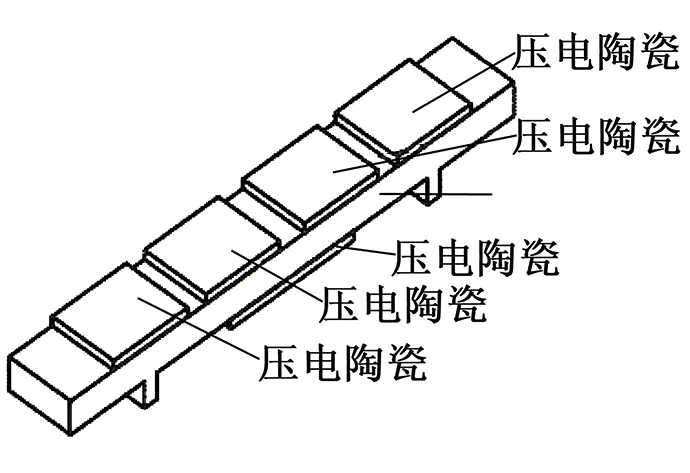
圖1 臥板式直線型超聲波電動機結構示意圖
1.2 電機的工作原理
采用兩個相位差為90°的特定頻率正弦電壓,將它們施加到電機上下表面粘貼的壓電片上。此時,電機下表面的一片壓電陶瓷片在彈性體上激發出水平方向的一階縱向拉伸模態,上面的4片壓電陶瓷片激發出垂直方向的四階彎曲模態。通過此兩種模態的復合,在與導軌接觸的兩齒上就會產生相位差為180°的橢圓運動。與此同時,持續地將機械負載垂直加載到彈性體上,就會產生摩擦力。通過摩擦力的作用,與臥板式超聲波電動機彈性體相接觸的動子(比如導桿)就可以實現直線移動[6]。
通過FEA軟件Algor對此電機的模態分析,得出圖2中的有限元分析結果。其縱向拉伸的振動模態頻率在63 kHz左右,橫向彎曲的振動模態頻率在64 kHz左右。另外,通過實驗測試,得到電機在不同預壓力下的機械特性試驗結果[7],如圖3所示。
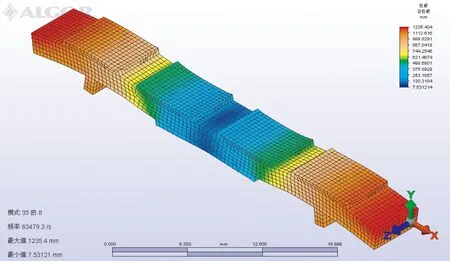
(a) 縱向拉伸振動模態 63.479 kHz

(b) 橫向彎曲振動模態 64.485 kHz
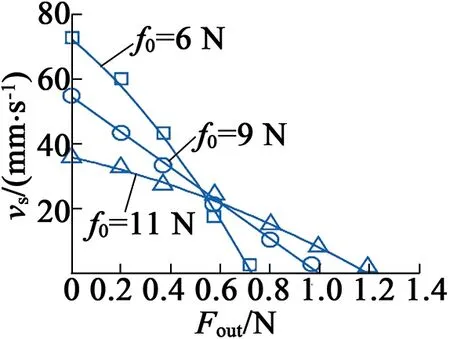
圖3 不同預壓力下電機機械特性試驗結果
2 機械手結構設計
2.1 總體方案與布局
參考曲柄滑塊機構,當把滑塊作為原動件,此時的搖桿在平面內做轉動。由于臥板式超聲波電動機的輸出為直線運動,所以當把這一直線運動作為輸入的動力時,搖桿可以完成在平面內的轉動。因此,本文提出如圖4所示的機構簡圖,擬設計的手指方案如圖5所示。通過導軌驅動連桿,連桿帶動搖桿轉動,即可以實現手指的運動。另外,因為背襯封裝結構可以提高臥板式超聲波直線電動機的輸出力[8],所以在設計中采用了分布式背襯進行預壓。
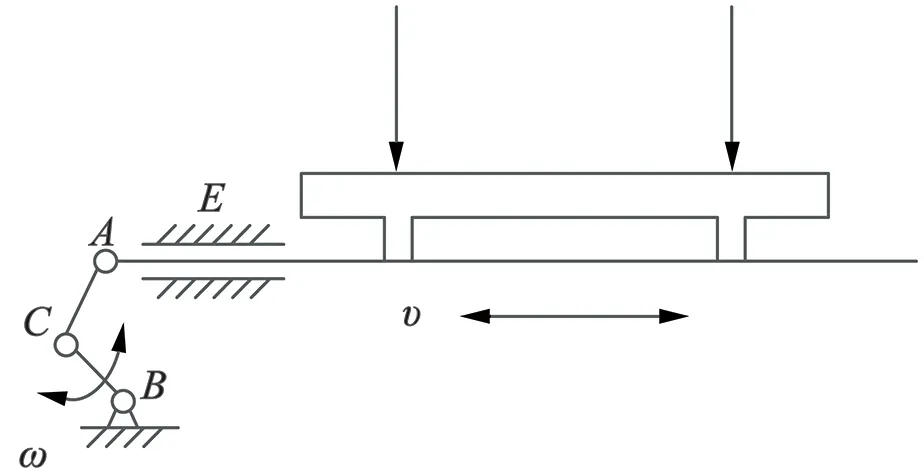
圖4 機構簡圖
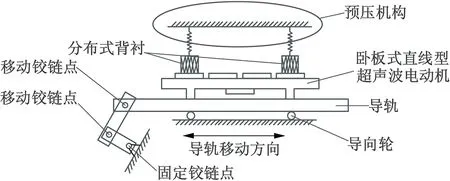
圖5 機器人手指結構設計
2.2 機構運動學和受力分析
假設導軌桿的輸出速度為va,則其在桿AC上的分速度為va·cosα。假設鉸鏈C的速度為vc,則其在桿AC上的分速度為vc·cosβ。根據理論力學速度投影定理,A點和C點在AC上投影相等,即:

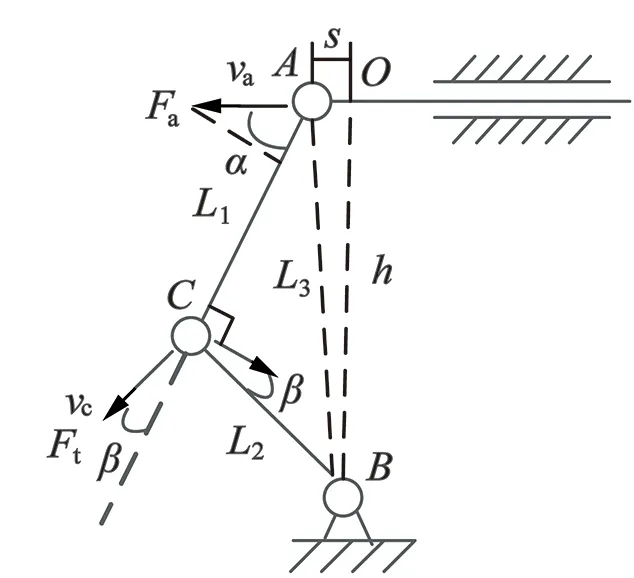
圖6 機構的運動分析圖
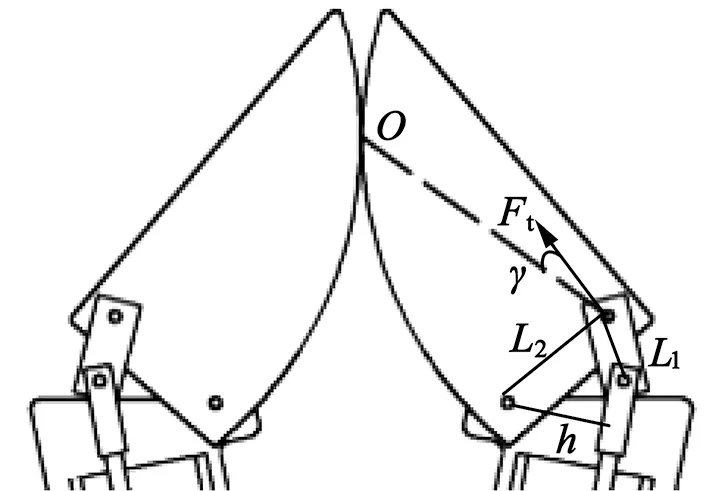
圖7 手指機構受力分析簡圖
因為桿AC受到的力為:
所以桿BC受到的切向力為:
假設零件被夾持在圖7所示的O點,與力Ft夾角為γ,則為了夾持住零件,由公式:
得零件電機推力與重量關系為:
式中:μ為手指材料與零件之間的摩擦系數。
2.3 手指關節機構設計
本文所設計的機械手指有兩個關節,分別是驅動關節和轉動關節。臥板式直線超聲波電動機內置在驅動關節中,它在彈性局部背襯的作用下驅動直線導軌。導軌通過小滑塊與連桿相連,連桿與手指外殼通過鉸鏈連接,手指外殼與底座通過鉸鏈連接,如圖8所示。
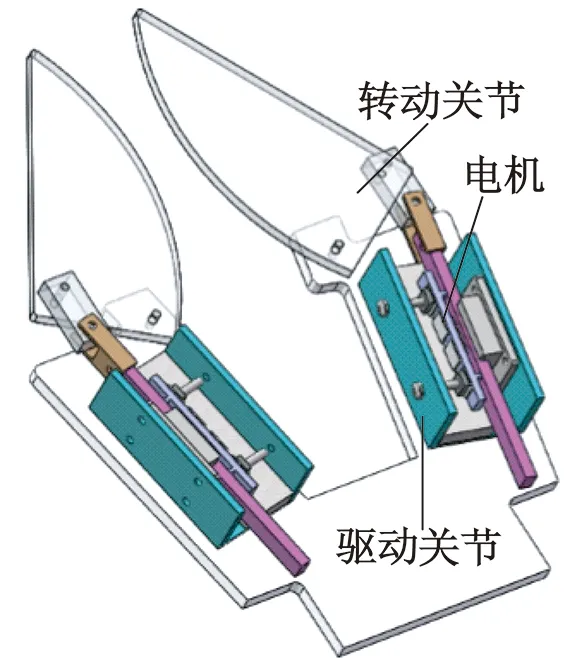
圖8 手指關節總裝結構圖
3 機械手樣機制作和性能測試
3.1 二指機械手試制
為驗證設計方案的可行性,本文根據以上設計制作了一款樣機,如圖9所示。在該樣機中,導軌的往復直線運動驅動手指關節繞固定點轉動,從而實現整個機構單自由度旋轉。在機構設計中,考慮到電機的行程以及電機的輸出速度,則可確定相關結構的尺寸。另外,為克服死點附近較大的阻力,改進了小滑塊的結構。
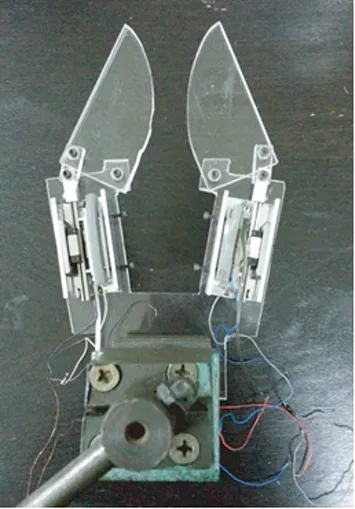
圖9 機械手雙指樣機
3.2 機械手性能測試
將二指機械手接入測試電路進行聯動測試。信號發生器輸出兩路正弦信號,經過兩個高頻功率放大器,加載到手指上,兩個直線電機并聯接入電路中。為實現機械手夾持筆套動作,分別對兩個手指加載一正一負的正弦電壓。通過調整正弦信號的頻率,同時根據手指實際運動情況調整加載在電機上的預壓力,即可改變手指運動速度。觀察兩個手指的運動狀態,在調試出比較理想的聯動狀態之后,將一個直徑約為20 mm的筆套(內含不同重量的砝碼)夾在它們之間,最終發現手指的最大夾持重量為20 g的砝碼。
實驗結果發現,兩個電機共同的最佳共振頻率在60~61 kHz之間。當電壓加到200 V(峰峰值),頻率為61.02 kHz時,機械手成功轉動塑料筆套,完成“搓”的動作,運行狀態良好且速度較快,圖10為筆套在手指間運動的3個位置對比圖。在此過程中,此二指機械手的手指會繞著固定點作轉動運動。即B1C1與水平方向的夾角從10°轉動到48°,相應的另外一個手指B2C2與水平方向的夾角從44°轉動到5°,如圖11所示的手指輸出軌跡曲線。
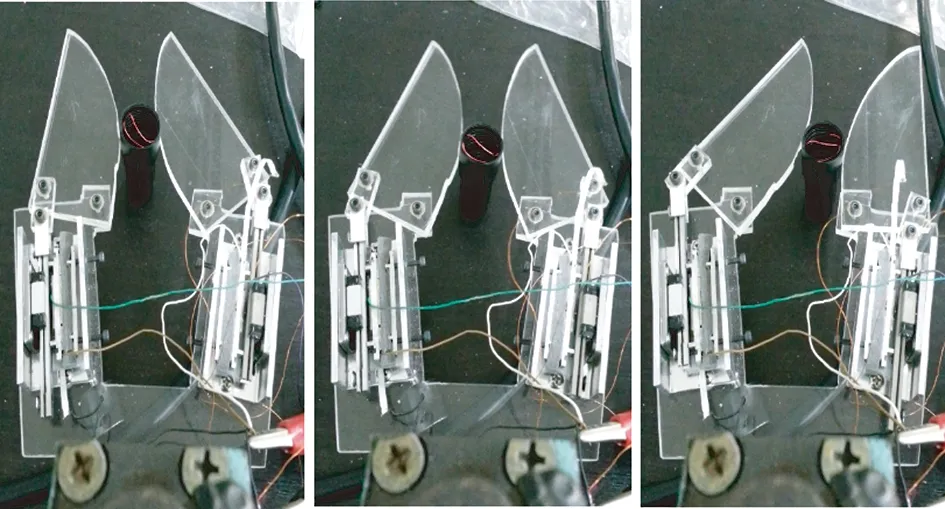
圖10 筆套運動位置對比圖
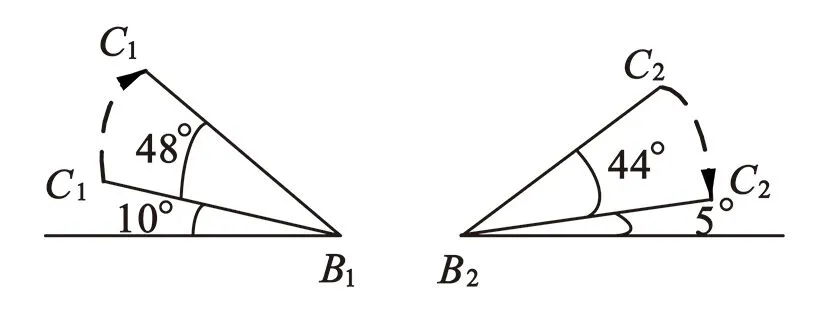
圖11 機械手兩指輸出運動軌跡
4 結 語
本文首先介紹了臥板式直線超聲波電動機的結構及其工作原理,然后對機械手進行了總體結構設計并建出模型,最后試制了一款二指機械手。實驗結果表明,二指機械手可以完成夾持筆套動作,基本實現了雙指機械手樣機的預期操作動作。
實驗也證明了直線超聲波電動機在機械手關節驅動中的可行性。但同時也發現電機輸出力/力矩的范圍還不夠寬,因此它更適合作為小型的關節驅動。而這種小型直接驅動機器人在航天工程、生物、醫學、微型制造、集成電路制造和VLSI 裝配等方面已有廣泛的應用[9],所以未來直線超聲波電動機會在太空機器人、生物醫療機器人等應用方面具有廣闊前景。
[1] 賀晉華.內嵌式形狀記憶合金擬人機械手指驅動控制研究[D].武漢: 華中科技大學, 2007.
[2] ZHOU Huaping,ZHANG Peng,ZHANG Liangqi.Coordinated planning and control for multifingered robot hand[C]//Proceedings of the IEEE International Conference on Industrial Technology (ICIT'96).IEEE,1996: 498-502.
[3] 李朝東.直線型壓電駐波超聲波電動機的研究[D].南京:南京航空航天大學,1998.
[4] 帥雙輝.超聲波電動機驅動機器人魯棒性控制研究[D].南京:南京航空航天大學,2007.
[5] 李朝東,何曉菁.臥式板型直線超聲波電動機的微型化[J].光學精密工程,2010,18(4):887-892.
[6] RHO J S, KIM B J,LEE C H,et al.Design and characteristic analysis of L1B4 ultrasonic motor considering contact mechanism[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2005,52(11):2054-2064.
[7] 張健滔,李朝東,何曉菁.臥板式直線超聲波電動機的特性分析模型[J].中國電機工程學報,2012,32(18):137-144.
[8] 張露,李朝東.背襯封裝對臥板式直線超聲波電動機輸出推力影響[J].振動與沖擊,2013,32(11):137-140.
[9] LYSHEVSKI S E.Non-linear control of advanced direct drive robots: theory and experiments[J].International journal of Control,2001,74(6):638-647.
Experimental Study of Piezoelectric Ultrasonic Linear Motor Embedded Driving Robot Finger
ZHANGCheng-wu,ZHANGLu,LIChao-dong
(Shanghai University,Shanghai 200072,China)
The structure and working principle of a board-type horizontal piezoelectric linear ultrasonic motor were introduced.According to the idea of embedded driving, the structure design and the force analysis of a two-finger manipulator was carry out, and its prototype was proposed.The experiment demonstrates the ability of its griping object, and the feasibility that board-type horizontal linear ultrasonic motor can be used to drive the robot finger.
piezoelectric ultrasonic linear motor; embedded driving; two fingers manipulator; mechanism design; twist-pinch action
2016-01-14
國家自然科學基金項目(51577112)
TM359.4
A
1004-7018(2016)09-0026-03
章成武,男,碩士研究生,研究方向為直線超聲波電動機。
