基于測地線的3D-LIPM機器人軌跡規(guī)劃方法
2016-12-20 06:39:25張博聞宋雪萍張連東平原陳勇
大連交通大學(xué)學(xué)報 2016年6期
張博聞,宋雪萍,張連東,平原,陳勇
(大連交通大學(xué) 機械工程學(xué)院,遼寧 大連 116028)*
?
基于測地線的3D-LIPM機器人軌跡規(guī)劃方法
張博聞,宋雪萍,張連東,平原,陳勇
(大連交通大學(xué) 機械工程學(xué)院,遼寧 大連 116028)*
提出一種基于測地線的3D-LIPM(3D Linear Inverted Pendulum model)機器人軌跡規(guī)劃方法.以3D-LIPM為研究對象,構(gòu)建使系統(tǒng)能量(動能)為最優(yōu)的黎曼度量,建立3D-LIPM的測地線方程.采用數(shù)值分析方法對測地線微分方程組進行求解,得出3D-LIPM機器人的軌跡變化規(guī)律:當(dāng)?shù)沽[與水平面的夾角θ位于0~π/2和π/2~π之間時,其投影與X軸的夾角ρ會隨之增大且曲率半徑也隨之增大;當(dāng)θ為π/2時,在一定范圍內(nèi),曲率半徑無窮大,曲線隨之出現(xiàn)轉(zhuǎn)折點且呈下降趨勢;當(dāng)ρ改變時,角位移θ、線位移l與ρ的曲線變化關(guān)系不變,只是隨著ρ值的改變圖像呈平移關(guān)系;當(dāng)l改變時,角位移θ、角位移ρ與線位移l曲線變化關(guān)系近似不變,只是隨著l值的改變圖像呈現(xiàn)近似平移關(guān)系.
機器人軌跡規(guī)劃;測地線;能量最優(yōu)
0 引言
機器人軌跡規(guī)劃對研究機器人來說非常重要,機器人的軌跡規(guī)劃合理,可以準(zhǔn)確和快速地對機器人進行一系列的控制.軌跡規(guī)劃包括關(guān)節(jié)空間的軌跡規(guī)劃和笛卡爾空間的軌跡規(guī)劃,前者是通過關(guān)節(jié)之間的變化來描述機器人軌跡的,后者是通過一種時間函數(shù)來描述機器人手部的位姿、速度和加速度[1].國內(nèi)外許多學(xué)者針對測地線方法進行了相關(guān)研究,Milos Zefran等[2]應(yīng)用測地線研究了單自由度剛體的平滑軌跡;Park[3]將黎曼度量的概念用于機器人機構(gòu)的設(shè)計;范國良等[4]基于幾何方法對多智能體群體剛性運動的路徑規(guī)劃進行了研究;Rodnay與Rimon[5]用測地線定性分析了二自由度機器人的動力學(xué)性質(zhì).但并未給出一般條件下的測地線的確定方法.張連東等[6-8]采用微分幾何中活動標(biāo)架方法,對平面二自由度機器人的相關(guān)問題運用測地線方法方法進行了研究以系統(tǒng)動能作為黎曼度量, 使兩節(jié)點之間動能最優(yōu),將軌跡進行優(yōu)化.
目前將測地線應(yīng)用于3D-LIPM機器人的最優(yōu)軌跡規(guī)劃方面的研究比較少.本文從系統(tǒng)模型3D-LIPM機器人的動能出發(fā),通過構(gòu)建測地線黎曼度量的方法,得出動能最優(yōu)的軌跡,此分析方法在一定程度上減小了計算量,如果用雙腿12個自由度把系統(tǒng)的動能表達出來,用測地線求其計算量龐大.該方法同樣適用于三維以上的機器人使用.
1 建立3D-LIMP機器人測地線方程
1.1 測地線
測地線是n維曲面上兩點之間的最短距離.黎曼度量是黎曼曲面上兩點之間距離的度量方式,不同的黎曼曲面對應(yīng)著不同的黎曼度量,不同的黎曼度量對應(yīng)著不同的測地線方程,在實際方程將黎曼度量中的系數(shù)帶入到測地線微分方程即可對其求解算出系統(tǒng)最優(yōu)軌跡.
1.2 構(gòu)建系統(tǒng)能量最優(yōu)的黎曼度量
把仿人機器人看成三維倒立擺模型,機器人在X-Y-Z坐標(biāo)中運動學(xué)正解(見圖1):

(1)

圖1 關(guān)節(jié)空間坐標(biāo)中的機器人倒立擺
已知機器人端執(zhí)行器的角速度ωi,弧長s平方的黎曼度量表達式為:
(2)
式中,i的取值范圍為1~3.
弧長平方的黎曼度量表達式可寫成黎曼度量系數(shù)矩陣的形式為:
(3)
式中,矩陣G為黎曼度量的度量系數(shù)矩陣,gij為黎曼度量系數(shù).
根據(jù)上述已知可以得到機器人軌跡弧長的黎曼度量為:
ds2=dX2+dY2+dZ2
(4)
其中, s為機器人軌跡的弧長;ds2為弧長的黎曼度量.
將機器人的速度式中的X、Y、Z變量轉(zhuǎn)換成為極坐標(biāo)形式,從而得到弧長的黎曼度量為:
ds2=l2dθ2+l2cos2θdθ2+dl2
(5)
將式(5)寫成黎曼度量系數(shù)矩陣的形式為:
(6)
1.3 求Christoffel符號
黎曼度量系數(shù)已求出即式(6),已知Christoffel符號公式:
(7)
為第一類克里斯托弗符號(Christoffel),所有指標(biāo)i,j,k,m的取值范圍為1~n,gij為度量系數(shù)矩陣的逆矩陣所對應(yīng)的各元素.
1.4 求3D-LIMP機器人測地線微分方程
已知測地線的微分方程為:
(8)

已知測地線方程組為:
(9)
(10)
式(10)為最終的測地線微分方程組.
2 求解測地線微分方程
2.1 測地線微分方程初始條件
給定機器人關(guān)節(jié)空間坐標(biāo)內(nèi)的初值,隨意選一組解:


l=1.0; l=0.6
2.2 解測地線的微分方程
根據(jù)解出的測地線微分方程,在給定的初始條件下,求解微分方程組,得到該機器人的軌跡規(guī)劃結(jié)果,如圖2所示.

(a) 弧長-角位移θ

(b) 弧長-角速度

(c) 弧長-角位移ρ

(e) 弧長-線位移

(f) 弧長-線速度

3 對測地線方程進行軌跡規(guī)劃
3.1 給定若干θ的值時的軌跡規(guī)劃圖
當(dāng)θ為某一定值時,得出角位移ρ和線位移l與角位移θ之間變化關(guān)系曲線如圖3~ 5所示.
由圖3可得:
(1)當(dāng)θ從0-π/2,角位移ρ隨著θ的增加而增加,而在θ=π/4,ρ=2.5時,曲線呈水平線,角位移θ最大值為1.25,這幾種情況表示機器人質(zhì)心軌跡呈弧線擺動;θ=π/3時,曲線先增加后下降(轉(zhuǎn)折點在ρ=3處),此時機器人質(zhì)心軌跡擺到一定角度后會往回運動,對應(yīng)的3D-LIPM不斷調(diào)整自己的姿勢以保持平衡.而θ=π/2時,當(dāng)角位移ρ增加,角位移θ呈水平線,當(dāng)ρ=3.8時圖像會垂直下降;機器人質(zhì)心會繞著z軸進行旋轉(zhuǎn),θ角始終不變,在轉(zhuǎn)折點處質(zhì)心會上升但桿在平面上的投影角度不會改變,只是投影長度變化;
(2)當(dāng)θ=2π/3和θ=3π/4時,曲線為凹曲線且線長較短.θ=2π/3時,曲線增長速率較快;θ=3π/4時,曲線增長速率較慢,表示倒立擺活動范圍變小.
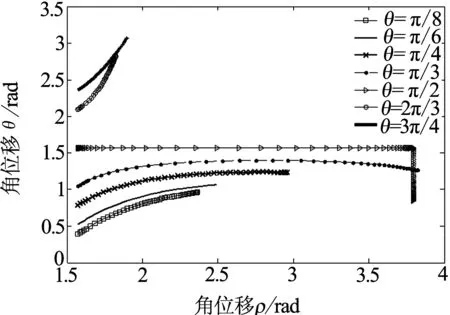
圖3 角位移ρ與角位移θ的關(guān)系圖

圖4 角位移ρ與線位移l的關(guān)系圖
由圖4可得:
(1)當(dāng)θ=π/8、π/6、π/4、π/3、2π/3、3π/4時,曲線為凹曲線增長,隨著θ增加,角位移ρ和線位移l都增加,但曲線增長率會逐漸降低.對應(yīng)的3D-LIPM旋轉(zhuǎn)的弧度半徑增大;
(2)當(dāng)θ=π/2,圖像先呈水平線增長,然后會垂直上升.此時的3D-LIPM與地面傾角最大,質(zhì)心點離地面高度不變,處于平穩(wěn)的過程,當(dāng)達到最平穩(wěn)的時候,3D-LIPM質(zhì)心與地面距離達到最大.
由圖5可得:
(1)當(dāng)θ=π/2時,線位移隨著角位移增大而減小.對應(yīng)的3D-LIPM與地面傾角會逐漸減小,但3D-LIPM質(zhì)心高度會增加.當(dāng)θ為0.8(角度值為45°)時,質(zhì)心高度不變;此時如果角度再減小的話,3D-LIPM機器人就會有不穩(wěn)定,產(chǎn)生摔倒趨勢;
(2)而對于其他情況,線位移隨著角位移增大而增大.對應(yīng)的3D-LIPM與地面傾角增大,3D-LIPM質(zhì)心高度會增加.

圖5 角位移θ與線位移l的關(guān)系圖
當(dāng)θ位于0~π/2之間以及π/2~π之間時,隨著θ的增加,ρ會隨之增大且曲率半徑增大,3D-LIPM機器人不斷進行調(diào)整以保持平穩(wěn);當(dāng)為π/2時,在一定范圍內(nèi),曲率半徑無窮大,隨之出現(xiàn)轉(zhuǎn)折點且曲線呈下降趨勢,3D-LIPM機器人此時最平穩(wěn).
3.2 給定若干ρ的值時的軌跡規(guī)劃圖
當(dāng)ρ為某一定值時,得出角位移和線位移l與角位移ρ之間變化關(guān)系曲線如圖6~ 7所示.

圖6 角位移ρ與角位移θ的關(guān)系圖
由圖6可得:角位移隨著角位移ρ的增加而先增加后下降.表示此時3D-LIPM與地面傾角先增加后減小,3D-LIPM遠離x軸,將向下一個位置邁出,機器人質(zhì)心軌跡相同.
由圖7可得:圖像呈曲線增長,隨著橫坐標(biāo)增加曲線斜率會增加,表示3D-LIPM機器人的質(zhì)心點離地面距離增加,質(zhì)心軌跡相同.

圖7 角位移ρ與線位移l的關(guān)系圖
由圖6和圖7可以判斷出角位移與線位移l的關(guān)系圖,圖中會出現(xiàn)多條線重疊于一條線,說明3D-LIPM與地面傾角先增加后減小,3D-LIPM機器人質(zhì)心高度增加.當(dāng)ρ增大時,曲線形狀趨于相同,圖像呈平移關(guān)系.3D-LIPM與地面傾角先增加后減小,3D-LIPM機器人質(zhì)心點離地面距離增加,以便向下一步邁出做好準(zhǔn)備.
3.3 給定若干l的值時的軌跡規(guī)劃圖
當(dāng)l為某一定值時,得出角位移、角位移ρ與線位移l之間變化關(guān)系曲線如圖8所示.

圖8 角位移ρ與角位移θ、線位移l的關(guān)系圖
由圖8角位移ρ與角位移的關(guān)系可得:當(dāng)桿長改變的時候,角位移θ與角位移ρ的關(guān)系變化不大,基本重疊于同一條曲線.表明桿長的改變對角位移和角位移ρ的影響不大.由圖8角位移ρ與線位移l的關(guān)系、角位移與線位移l的關(guān)系表明:桿長隨著角位移ρ的增加而增大,當(dāng)達到一定值時,變化加劇;當(dāng)l增大時,曲線形狀近似趨于相同,呈平移關(guān)系.
4 結(jié)論
(1)本文應(yīng)用測地線方法對仿人機器人的倒立擺模型進行了分析,通過求解測地線方程得到了3D-LIPM倒立擺的測地線模型;
(2)分析了各參數(shù)之間的變化規(guī)律,可知當(dāng)位于0~π/2之間以及π/2~π之間時,隨著的增加,ρ會隨之增大且曲率半徑增大;當(dāng)為π/2時,在一定范圍內(nèi),曲率半徑無窮大,隨之出現(xiàn)轉(zhuǎn)折點且曲線呈下降趨勢;當(dāng)分別給定角位移ρ和線位移l時,曲線關(guān)系變化不大,近似呈平移關(guān)系;
(3)文中的分析對象是三維模型,如果探討多維情況下的,測地線也是一種可行的研究方法.
[1]蔡自興,謝斌.機器人學(xué)[M]. 3版,北京:清華大學(xué)出版社,2015.
[2]ZEFRAN M, KUMAR V, CROKE B C.On the generation of smooth three-dimensional rigid body motions[J]. IEEE Transactions on Robotics and Automation, 1998, 14(4): 576-589.
[3]PARK FC. Distance Metrics on the Rigid Body Motions with Applications to Mechanism Design[J].ASME Journal of Mechanical Design, 1995,117(3):48-54.
[4]范國梁,王云寬.基于幾何方法的多智能體群體剛性運動的路徑規(guī)劃[J].機器人,2005,27(4):362-366.
[5]RODNAY G, RIMON E. Isometric visualization of configuration spaces of two degrees of freedom mechanisms[J]. Mechanism and Machine Theory, 2001, 36(4): 523-545.
[6]張連東,王德倫.一種基于測地線的機器人軌跡規(guī)劃方法[J].機器人, 2004, 26(1): 83-86.
[7]張連東.基于微分幾何學(xué)的機器人操作性能的研究[D].大連,大連理工大學(xué), 2004.
[8]ZHANG LIANDONG,ZHOU CHANGJIU.Robot optimal trajectory planning based on geodesics[C]//2007 IEEE International Conference on Control and Automation .Guangzhou, 2007: 2433-2436.
3D-LIPM Robot Trajectory Planning Method based On Geodesic
ZHANG Bowen, SONG Xueping, ZHANG Liandong, PING Yuan, CHEN Yong
(School of Mechanical Engineering, Dalian Jiaotong University, Dalian 116028, China)
A geodesic based trajectory planning method for 3D-LIPM(3D Linear Inverted Pendulum model) robots is proposed. Taking 3D-LIPM as the research object, the system energy (kinetic energy) is constructed as the optimal Riemann metric, and the geodesic equation of 3D-LIPM is established. Numerical analysis method is used to solve the differential equations of the geodesic line, and the change law of the trajectory of the 3D-LIPM robot is obtained. When the inverted pendulum and the horizontal plane angle θ is located in between 0-π/2 and π/2-π, the angle ρ between the projection and the X axis will subsequently increases, and the radius of curvature increases. When θ is π/2, the radius of curvature is infinity in a certain range, then the curve has turned point and downward trend. When changing ρ, invariant curve variation of θ angle displacement and angular displacement ρ and line displacement l, the image show a translation relation with the ρ value change. When changing l, invariant curve variation of θ angle displacement and angular displacement ρ and line displacement l, the image show the approximate relation shift with value l change.
robot trajectory planning; geodesics; energy optimal
1673- 9590(2016)06- 0089- 06
2016-06-23
國家自然科學(xué)基金資助項目(51275065,51305055)
張博聞(1992-),男,碩士研究生;張連東(1971-),男,副教授,博士,主要從事機器人軌跡規(guī)劃方面的研究E- mail:2285084880@qq.com.
A