多智能體技術(shù)在交通系統(tǒng)中的應(yīng)用研究
2016-12-09 10:25:30張磊
山西建筑 2016年18期
張 磊
(山西省交通科學(xué)研究院,山西 太原 030006)
?
·計算機(jī)技術(shù)及應(yīng)用·
多智能體技術(shù)在交通系統(tǒng)中的應(yīng)用研究
張 磊
(山西省交通科學(xué)研究院,山西 太原 030006)
從城市交通管理系統(tǒng)、交通信號協(xié)調(diào)控制系統(tǒng)、交通誘導(dǎo)系統(tǒng)和交通仿真等方面,介紹了多智能體技術(shù)在交通系統(tǒng)中的應(yīng)用現(xiàn)狀,闡述了多智能體技術(shù)在緩解城市交通問題中的措施,提出了多智能體技術(shù)在城市交通系統(tǒng)應(yīng)用中的發(fā)展趨勢。
多智能體,交通管理,交通控制,交通誘導(dǎo),交通仿真
0 引言
當(dāng)前,我國城市化進(jìn)程加快,車輛猛增,由此引發(fā)的城市交通問題頗受關(guān)注。同時智能交通系統(tǒng)對緩解交通問題發(fā)揮的作用也初見成效[1]。
隨著計算機(jī)網(wǎng)絡(luò)和計算機(jī)通訊技術(shù)的快速發(fā)展,智能體及多智能體系統(tǒng)引起重視。智能體具有自主性、交互性、主動性和反應(yīng)性等基本特征[2,3]。由于城市交通系統(tǒng)具有規(guī)模龐大、關(guān)系復(fù)雜的特點,將多智能體技術(shù)應(yīng)用到交通系統(tǒng)是一種趨勢。
1 多智能體技術(shù)在交通管理系統(tǒng)中的應(yīng)用
在交通管理系統(tǒng)中,多智能體技術(shù)主要用于為決策者提供實時的管理控制,以改善交通網(wǎng)運(yùn)行狀況,緩解道路的擁擠程度,減少交通事故的發(fā)生從而改善交通狀況。
朱茵等人[4]通過對界面智能體、移動智能體和信息智能體三類智能體的研究,將其結(jié)合,通過交通管理機(jī)構(gòu)合理的組織,構(gòu)建出基于多智能體技術(shù)的交通管理系統(tǒng)。其中,界面智能體向用戶提供相應(yīng)結(jié)論及解釋機(jī)制,同時用戶可輸入相關(guān)信息;移動智能體通過與其他智能體之間的協(xié)調(diào)來完成任務(wù);信息智能體將檢測到的信息反饋給用戶,同時監(jiān)視信息的變化。
交通管理集成系統(tǒng)是通過各個智能體之間相互協(xié)同、相互服務(wù),從而構(gòu)成的一個多智能體系統(tǒng)。其中各個智能體成員的活動是自制和獨立的,它通過協(xié)商等手段協(xié)調(diào)和解決各個智能體目標(biāo)和行為之間的矛盾。通過交通管理服務(wù)機(jī)構(gòu)為各個智能體提供交互平臺,使這些智能體成員能夠更好地協(xié)同工作,發(fā)揮應(yīng)有的效應(yīng)。
2 多智能體技術(shù)在城市交通控制中的應(yīng)用
2.1 多智能體技術(shù)在交通信號協(xié)調(diào)控制中的應(yīng)用
在城市交通系統(tǒng)中,交叉口是城市道路的重要節(jié)點,對交叉口交通信號的有效控制是提高道路通行能力、緩解交通擁堵的一種重要手段。
承向軍[5]分析了現(xiàn)有信號控制系統(tǒng)存在的問題,采用分布式交通控制結(jié)構(gòu),在加強(qiáng)單個路口信號控制的智能型的同時,建立相鄰路口間的信息交流與合作機(jī)制,形成基于多智能體的分布式交通控制方式。信號控制智能體由本地路口信號控制器、相鄰路口信息處理器、通信接口和車輛檢測信息處理器四個部分組成(如圖1所示)。

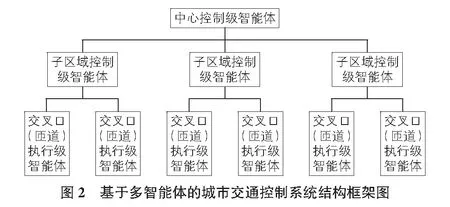
于德新等人[6]根據(jù)智能體的模型結(jié)構(gòu)及分層遞階的結(jié)構(gòu)體系特點建立了分層遞階的多智能體城市道路控制系統(tǒng),具體結(jié)構(gòu)框架如圖2所示。該控制系統(tǒng)包含執(zhí)行控制級、子區(qū)域控制級及中心控制級智能體,各級智能體除了進(jìn)行同級間的協(xié)調(diào)外還可以通過上一級協(xié)調(diào)。
為了實現(xiàn)城市交通干線的動態(tài)智能協(xié)調(diào)控制,孔祥杰等人[7]提出了一種基于多智能體的干線動態(tài)雙向綠波帶控制算法。該算法將控制結(jié)構(gòu)分為兩層,下層由路口控制器智能體ICA(Intersection Controller Agent)組成,ICA控制交通干線中的單個交叉口。上層是協(xié)調(diào)控制器智能體CCA(Coordination Controller Agent),控制干線內(nèi)的各個ICA,兩層多智能體結(jié)構(gòu)見圖3。
CCA的作用是處理交通信息并生成優(yōu)化控制方案,包括交通信息處理模塊和優(yōu)化協(xié)調(diào)控制模塊兩部分。交通信息處理模塊的作用是對獲取的各路口交通信息進(jìn)行預(yù)處理。優(yōu)化協(xié)調(diào)控制模塊在交通信息處理模塊提供的數(shù)據(jù)基礎(chǔ)上,確定關(guān)鍵路口和相位組成并生成動態(tài)優(yōu)化配時方案,再將方案提供給各個ICA。ICA負(fù)責(zé)交通控制方案的執(zhí)行和基礎(chǔ)交通信息的采集,ICA也具有一定的自主能力,根據(jù)路口的實際狀況,對上級協(xié)調(diào)層發(fā)送的動態(tài)優(yōu)化配時方案在一定范圍內(nèi)進(jìn)行適當(dāng)調(diào)整,以實現(xiàn)路網(wǎng)的最優(yōu)化控制。

對城市交通網(wǎng)絡(luò)中局部交通流的優(yōu)化可能引起其他區(qū)域交通狀況的惡化的問題,歐海濤等人[8]提出以一個智能體的方式實現(xiàn)一個信號燈交叉口控制,對多個信號燈交叉口形成的交通網(wǎng)絡(luò)采用多智能體協(xié)調(diào)控制的方式實現(xiàn)網(wǎng)絡(luò)流量優(yōu)化來消除擁塞。在城市交通控制中引入基于遞歸建模方法和貝葉斯學(xué)習(xí)的多智能體方法,可根據(jù)實際觀測到的行為變化來在線調(diào)整其他智能體的行為。
2.2 多智能體技術(shù)在交通誘導(dǎo)中的應(yīng)用
要使城市交通能夠高效運(yùn)轉(zhuǎn),除了對交通信號進(jìn)行協(xié)調(diào)控制之外,合理有效的交通誘導(dǎo)也能發(fā)揮積極的作用。
動態(tài)交通誘導(dǎo)(Dynamic Route Guidance,DRG)是根據(jù)當(dāng)前路網(wǎng)的交通流狀況及車輛的目的地,經(jīng)優(yōu)化計算為車輛提供最佳的行駛路線,從而達(dá)到優(yōu)化均衡網(wǎng)絡(luò)交通流的目的[9]。
楊兆升等人[10]以交通流分配路網(wǎng)全局最優(yōu)為目標(biāo),用多智能體技術(shù)和信息融合技術(shù)將城市交通控制和交通誘導(dǎo)協(xié)調(diào)起來,均衡每個路口的交通流量,提高整個路網(wǎng)的通行能力。集成后的系統(tǒng)采用分層遞階的層次結(jié)構(gòu),系統(tǒng)協(xié)作體系框架如圖4所示。該系統(tǒng)按照功能可分為5類智能體:TSC執(zhí)行級智能體功能是完成單個交叉口的信號控制,并通過與相關(guān)TSC執(zhí)行級智能體和DRG執(zhí)行級智能體的協(xié)作來實現(xiàn)區(qū)域內(nèi)的協(xié)調(diào)控制;TSC決策級智能體實現(xiàn)交通控制決策功能,根據(jù)城市路網(wǎng)交通流的實時運(yùn)行狀況尋求總體優(yōu)化控制策略;DRG執(zhí)行級智能體根據(jù)動態(tài)的道路交通狀況實時調(diào)整車輛的運(yùn)行路線;DRG決策級智能體完成交通誘導(dǎo)決策功能;控制與誘導(dǎo)協(xié)作智能體的作用是將TCS決策級智能體和DRG決策級智能體集成,使得TSC控制策略與DRG決策能夠交流與協(xié)作,通過與TSC決策級智能體和DRG決策級智能體交互得到智能協(xié)作的信號控制策略和誘導(dǎo)策略。

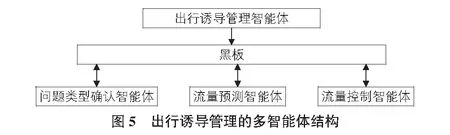
徐麗群[11]運(yùn)用多智能體技術(shù)設(shè)計了以城市交通管理中心為基礎(chǔ)的出行誘導(dǎo)管理系統(tǒng),該系統(tǒng)中將動態(tài)交通信息與交通管理專家的知識和經(jīng)驗結(jié)合起來,通過黑板模型集成了出行誘導(dǎo)管理過程中的交通問題類型確定、分流交通量預(yù)測和分流交通量控制3個智能體,使每一個智能體能夠與黑板通信,智能體之間在黑板上進(jìn)行信息分享與協(xié)作。該系統(tǒng)的結(jié)構(gòu)框架如圖5所示。
隨著智能體技術(shù)的日趨成熟,將多智能體技術(shù)應(yīng)用于城市交通管理與誘導(dǎo)中會有越來越多的應(yīng)用,將在交通系統(tǒng)中發(fā)揮重要的作用。
3 多智能體技術(shù)在交通仿真中的應(yīng)用
交通系統(tǒng)的定量研究方法一般有數(shù)學(xué)模型和系統(tǒng)仿真兩種[12]。由于數(shù)學(xué)手段的限制,對復(fù)雜系統(tǒng)建立模型并進(jìn)行求解的能力是有限的。交通仿真技術(shù)克服了傳統(tǒng)數(shù)學(xué)模型的缺陷,其直觀、靈活的特點使之成為交通工程領(lǐng)域的研究熱點之一。
李得偉等人[12]以軌道交通樞紐為研究對象,提出了交通樞紐內(nèi)乘客、設(shè)施及交通工具間相互協(xié)調(diào)的微觀模擬方法,建立了多智能體樞紐仿真環(huán)境,對軌道交通樞紐內(nèi)客流的微觀行為與設(shè)施的協(xié)調(diào)進(jìn)行仿真,通過智能體自主決策,觀察不同的群體行為和樞紐設(shè)施布局之間的關(guān)系及影響,為樞紐內(nèi)部的設(shè)施布局提供決策支持。
曾瀅等人[13]在實驗交通工程理論的基礎(chǔ)上,運(yùn)用多智能體的復(fù)雜系統(tǒng)建模方法對微觀交通仿真進(jìn)行研究。利用StarLogo編制仿真程序,模擬城市快速路入口匝道車輛匯入的跟馳、換道等行為。通過仿真實驗的設(shè)計與實現(xiàn),進(jìn)一步證明了利用多智能體技術(shù)來研究交通這個復(fù)雜系統(tǒng)的可行性。
魏赟等人[14]在需求分析的基礎(chǔ)上,對城市交通微觀仿真系統(tǒng)進(jìn)行研究,提出了基于多智能體的微觀交通仿真模型。探討了基于智能體的微觀交通仿真系統(tǒng)建模過程,從交通流生成模型、元胞自動機(jī)模型等入手,構(gòu)建了系統(tǒng)的架構(gòu)、仿真流程及各智能體的設(shè)計方案。
公交系統(tǒng)的運(yùn)行仿真可用于實時公交調(diào)度、評價公交路網(wǎng)結(jié)構(gòu)和制定優(yōu)化調(diào)整策略。安健等人[15]通過分析公交運(yùn)行服務(wù)特性、乘客的出行特性及其相互作用機(jī)理,利用基于多智能體的建模和仿真方法,將個體微觀行為與系統(tǒng)整體特性有機(jī)結(jié)合,對公交運(yùn)行服務(wù)特性、乘客特性、信息條件及系統(tǒng)要素交互機(jī)制分別進(jìn)行了分析和建模,設(shè)計了公交運(yùn)行服務(wù)仿真平臺。通過仿真反映出公交運(yùn)行服務(wù)過程,探索信息條件下公交乘客出行行為規(guī)律,揭示了公交運(yùn)行服務(wù)特性與乘客行為特性的相互作用機(jī)理。
4 結(jié)語
多智能體技術(shù)在交通領(lǐng)域的運(yùn)用已取得了一些成果,在今后應(yīng)用中還需充分考慮城市交通系統(tǒng)的特點,緩解系統(tǒng)內(nèi)通信需求、降低運(yùn)算量、優(yōu)化系統(tǒng)組織結(jié)構(gòu)、增強(qiáng)系統(tǒng)的穩(wěn)定性和安全性,從而使智能體技術(shù)在交通領(lǐng)域中發(fā)揮更大的作用。
智能交通是城市交通的發(fā)展趨勢,城市交通將來會被各式智能、自治的智能體構(gòu)建而成,它們之間通過互聯(lián)網(wǎng)、無線網(wǎng)絡(luò)或自組織網(wǎng)絡(luò)相連接,不斷地采集信息并做出決策,最終使城市交通系統(tǒng)獲得徹底的智能。
[1] 姚偉紅.城市道路交通面臨的問題及解決途徑[J].山西交通科技,2007,3(6):79-81.
[2] 李海剛,吳啟迪.多Agent系統(tǒng)研究綜述[J].同濟(jì)大學(xué)學(xué)報,2003,31(6):728-732.
[3] 承向軍,楊肇夏.基于多智能體技術(shù)的城市交通控制系統(tǒng)的探討[J].北方交通大學(xué)學(xué)報,2002,26(5):47-50.
[4] 朱 茵,唐禎敏,錢大琳.基于多智能體技術(shù)的交通管理系統(tǒng)的研究[J].中國公路學(xué)報,2002,15(3):80-83.
[5] 承向軍.基于多智能體的分布式交通信號協(xié)調(diào)控制研究[D].北京:北京交通大學(xué),2005.
[6] 于德新,楊兆升,王 媛,等.基于多智能體的城市道路交通控制系統(tǒng)及其協(xié)調(diào)優(yōu)化[J].吉林大學(xué)學(xué)報(工學(xué)版),2006,36(1):113-118.
[7] 孔祥杰,沈國江,孫優(yōu)賢.基于多智能體的交通干線動態(tài)智能協(xié)調(diào)控制[J].解放軍理工大學(xué)學(xué)報(自然科學(xué)版),2010,11(5):544-550.
[8] 歐海濤,張衛(wèi)東,張文淵,等.基于多智能體技術(shù)的城市智能交通控制系統(tǒng)[J].電子學(xué)報,2000,28(12):52-55.
[9] 李瑞敏,史其信.基于多智能體系統(tǒng)的城市交通控制與誘導(dǎo)集成化研究[J].公路交通科技,2004,21(5):109-112.
[10] 楊兆升,陳 昕,王 媛,等.城市交通控制與誘導(dǎo)系統(tǒng)智能協(xié)作[J].交通運(yùn)輸系統(tǒng)工程與信息,2005,5(6):43-47.
[11] 徐麗群.基于多智能體技術(shù)的出行誘導(dǎo)管理系統(tǒng)研究[J].東南大學(xué)學(xué)報(自然科學(xué)版),2004,34(6):814-818.
[12] 李得偉,韓寶明,魯 放.基于多體的交通樞紐微觀仿真研究[J].都市快軌交通,2006,19(5):48-51.
[13] 曾 瀅,楊曉光,孫 劍,等.基于多智能體的微觀交通仿真研究[A].2005年海峽兩岸智能交通運(yùn)輸系統(tǒng)學(xué)術(shù)研討會暨第二屆同舟交通論壇[C].2005.
[14] 魏 赟,韓 印,范炳全,等.基于多智能體和元胞自動機(jī)的微觀交通仿真系統(tǒng)建模[J].上海理工大學(xué)學(xué)報,2009,31(3):242-246.
[15] 安 健,楊曉光,滕 靖,等.基于多智能體的公交運(yùn)行服務(wù)仿真模型[J].同濟(jì)大學(xué)學(xué)報(自然科學(xué)版),2010,38(6):832-838.
A review on application of multi-agent technology to traffic system
Zhang Lei
(ShanxiTransportationResearchInstitute,Taiyuan030006,China)
From the urban traffic management system, coordinative controlling system for the traffic signals, and traffic guidance system and traffic simulation, the paper introduces the application status of the multi-agent technology in traffic system, and indicates its measures in relieving the urban traffic problems, and points out its application tendency for the urban traffic system.
multi-agent, traffic management, traffic control, traffic guidance, traffic simulation
1009-6825(2016)18-0256-03
2016-04-18
張 磊(1987- ),男,助理工程師
U491.2
A
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46