基于DSP三相異步電動機矢量變換控制系統構建
2016-12-08 06:18:52陳炳文林若波黃錦鈿
汽車實用技術 2016年11期
陳炳文,林若波,黃錦鈿
(揭陽職業技術學院機電工程系,廣東 揭陽 522000)
汽車電子
基于DSP三相異步電動機矢量變換控制系統構建
陳炳文,林若波,黃錦鈿
(揭陽職業技術學院機電工程系,廣東 揭陽 522000)
針對異步電動機的矢量控制原理和SVPWM技術,以16位DSP芯片TMS320F2812為核心,構建了基于異步電動機矢量控制的變頻調速系統,描述了各硬件功能單元的組成結構和設計,運用異步電動機的矢量控制,實現變頻調速。
異步電動機;DSP;矢量控制;變頻調速
10.16638/j.cnki.1671-7988.2016.11.034
CLC NO.: U463 Document Code: A Article ID: 1671-7988(2016)11-92-03
隨著微處理技術和電力電子技術、現代控制理論的不斷發展,矢量控制技術以其控制精度高,低頻特性好,轉矩響應快等優點,在機電控制技術中受到推廣。三相異步電動機的參數系統包括:變量多、耦合強及變化的非線性,可以選擇轉子磁通作為參考坐標,運用數學中的坐標變換原理,可將電機中的定子電流分為兩個分量來控制:即勵磁分量和轉矩分量。
在電機的矢量控制技術中,可運用SVPWM調制方法,將逆變器和三相電機組成一個系統,通過TMS320F2812電機專用控制芯片控制,設計出三相異步電動機的矢量控制系統方案,通過相關數據的測試及運行情況,證明方案的可行性。
1、異步電動機矢量控制方法
1.1運用數學模型建立矢量,實現矢量的控制
在矢量控制中,運用電機中的解耦控制理論基礎,建立坐標系,運用正交方法,將磁場分量id、轉矩分量iq從三相異步電動中的定子電流中分解出來,可得到轉矩:

從上式中可見,在三相異步電動機的矢量控制過程中,完全可用id、iq來實現對電機定子電流的控制,具體的解耦過程可由變換坐標的方法來分析。
在矢量變換坐標系中,ia、 ib、 ic是分別從三相電機定子電流中分解出來的三個矢量,運用磁場的等效原理,將之轉換為兩個正交分量id、iq,并得到其轉換矩陣的表達式VR為:
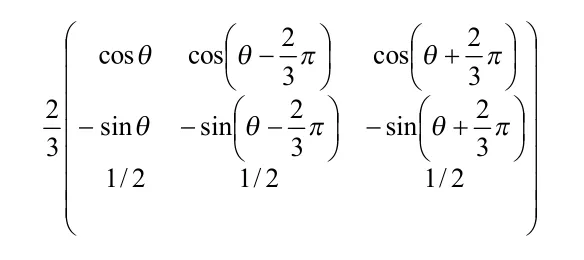
其反變換矩陣VR-1:

從上式中可以看出,實現旋轉坐標的兩個正交分量id、 iq能從靜止坐標系中的三相電流ia、ib、ic實現等效變換,并且id和iq是互相解耦的,從而實現三相電機的解耦控制。
在新的d-q-o的坐標系中,可得到三相異步電動機的狀態方程和轉矩表示式。
若在新的d-q-o的坐標系中,兩組繞組互為正交,其中一組用來等效三相電機的定子繞組,另一組用來等效三相轉子繞組。
定子兩相正交繞組的軸線位置為d1-q1,轉子兩相正交繞組的軸線位置為d2-q2;且在空間位置上,d1-q1與d2-q2始終重合。
在d-q-o旋轉坐標系中,電機的磁鏈、電機的電壓、電機的輸出轉矩可分別表示為:
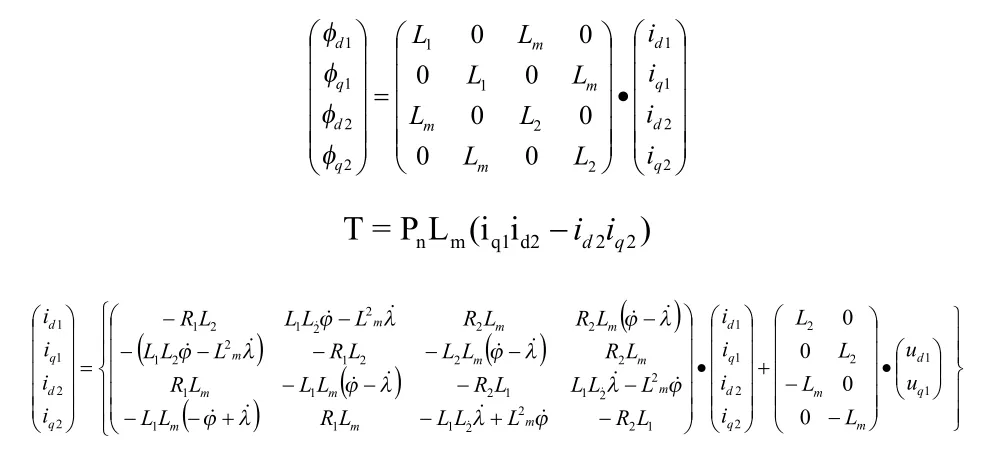
在d-q-o旋轉坐標系中,要求以定子電流和轉子磁鏈為變量來確定電機電磁轉矩的,其狀態方程可表示為:

相應的電機轉矩表達式為:

如果在一定情況下,能夠同步旋轉坐標系d-q-o與轉子磁鏈,把d軸定位在轉子磁鏈上,則可把坐標系d-q進行轉化,變為M-T轉子磁鏈坐標系,于是,在新的M-T坐標系中,電機磁鏈及轉矩的方程可表示為:

式中:

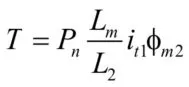
由此可知,要實現磁場電流分量與轉矩電流分量兩者的解耦,必需選擇好磁鏈的空間矢量方向,作為M軸方向,并且使其幅值不變,從而實現轉矩的轉子電流it1控制T。
1.2建立矢量控制系統
根據電機的控制理論,建立矢量控制系統,其控制過程為:勵磁電流給定值---電機轉速反饋與給定轉速比較--轉矩信號輸出--三相電流坐標變換--解耦。
經解耦后的勵磁電流與實際勵磁電流,送到pi調節器與轉矩信號給定值與實際轉矩電流進行比較,進行變換后,得到Ua和Uβ的兩相矢量調制信號,運用SVPWM技術的算法,得出PWM脈沖調制信號,用以驅動控制逆變器的功率開關器件,完成了異步電動機轉矩的控制。

圖1
1.3SVPWM的工作原理
電壓空間矢量PWM技術是電機磁鏈圓形軌跡與SPWM技術直接結合,直接從電動機角度出發,以電動機磁鏈圓形軌跡控制為目的,該方法不僅在控制上與SPWM的效果相同,可操作性強,效果明顯。
SVPWM調制方法是利用交替使用不同的電壓空間矢量, 并由兩個零矢量和六個基本電壓矢量合成實現的,參考矢量合成規則是:由當前參考矢量所在扇區的兩個電壓矢量分別作用一定時間合成所得。在參考矢量的旋轉頻率補償上,可在設計時插入零矢量。
2、矢量控制系統硬件的組成
矢量控制系統可由三個部分組成:系統控制與運算模塊、功率變換模塊、檢測采樣模塊。
采用TI公司的電機專用的控制與運算模塊:16位DSP控制芯片TMS320F2812為核心,用以實現采樣調理、矢量控制及SVPWM調制算法等。計算出三相電機的轉速、定子的各相電流和磁場的相對位置,再通過矢量控制算法,得到模塊的電壓空間矢量PW信號,這樣的信號經功率進行放大后,經過驅動IGBT開關器件處理,同時在采樣過程中加入軟件濾波和信號采樣錯誤處理。此外,在該控制系統中增加輔助電路:隔離開關電源、PWM驅動電路、轉速轉矩傳感器以及霍爾電流傳感器等,設置開關電源,為整個控制電路提供多路隔離電源,矢量控制系統硬件框圖如圖2所示。
功率變換模塊完成功率的變換任務,并由不可控整流電路、中間直流電容濾波器和IGBT模塊封裝逆變器等構成。
檢測采樣模塊則由三相電機中的電流采樣和電壓采樣,送調理電路進行比較,完成信號的校正工作。

圖2 控制系統總體框圖
3、矢量變換控制系統軟件組成
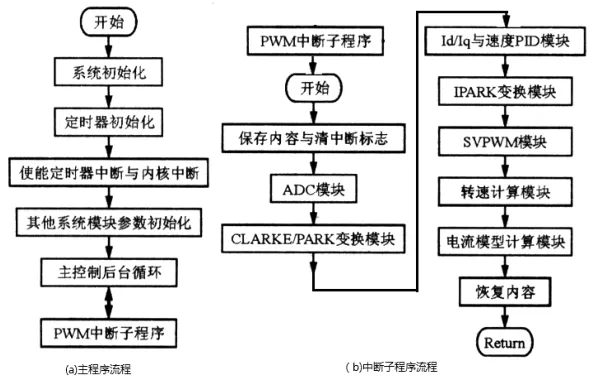
圖3 系統主要程序控制圖
控制系統軟件主要分為兩部分:一是控制系統主程序,包括系統初始化、定時器初始化、定時器下溢中斷與CPU中斷、其它系統模塊參數初始化等;二是中斷子程序,包括ADC模塊、CLARKE/PARK變換模塊、Id/Iq與速度PID模塊、PARK逆變模塊、SVPWM模塊、速度計算模塊、電機電流模型計算模塊等。整個系統軟件的總體結構如圖3所示。
4、系統調試結果
在軟硬件設計后,構建了實驗裝置,對矢量控制及SVPWM系統進行實驗研究,通過系統調試對上述矢量控制算法進行實驗驗證。
系統測試參數如下:電機為4極三相異步電機,額定參數值為:PN=5kW,UN=220V,IN=7.5A,f=50 Hz,n=1500 r /min。
IGBT的開關頻率為1.2kHz,死區為5.4μs。當給定轉速為0.9倍的基準轉速時,設置開關頻率為1 .2kHz,小負載狀態下運行。 將DSP的PWM1輸出引腳外接一個RC低通濾波器,圖4顯示出觀察到的SVPWM控制信號及逆變器輸出線電壓、相電流波形。相電流幾乎為正弦波,該實驗結果顯示,該控制系統具有良好的動態和靜態特性。表明控制策略達到了理想的效果。

圖4 實驗波形
以TI公司的電機控制專用DSP芯片TMS320F2812為基礎,利用DSP芯片的運算能力和快速處理能力,采用基于轉子磁場定向控制和SVPWM調制技術,構建了一種異步電機矢量控制系統,并通過系統的調試,結果表明了該控制算法的正確性和有效性,對三相交流異步電動機的研究有一定的實用價值。
[1]王成元.夏加寬.電機現代控制技術[M].機械工業出版社.2006.
[2]何偉. 異步電機矢量控制的檢測及參數辨識[D]. 南昌:南昌大學學報,2013.
[3]朱軍,朱政.轉差頻率矢量控制的電機調速系統設計與研究[J].現代電子技術,2010,(20):331.
[4]李畸勇. 基于DPS 的間接矢量控制系統的研究[D]. 成都:西南交通大學學報,2002.
[5]阮毅,陳維鈞. 運動控制系統[ M]. 北京:清華大學出版社,2006.
[6]周淵深,陳濤,朱希榮. 電力拖動自動化控制系統[M]. 北京.
Three-phase Asynchronous Motor Vector Transformation Control System Builts Based on DSP
Chen Bingwen, Lin Ruobo, Huang Jintian
( Department of mechanical and electrical engineering, Jieyang vocational and technical college, Guangdong Jieyang 522000 )
In view of the asynchronous motor vector control principle and SVPWM technology, with 16 bits DSP chip TMS320F2812 as the core, the variable frequency speed regulation system based on asynchronous motor vector control is built. It describes the structure and design of each function of the hardware unit using asynchronous motor vector control and frequency control of motor speed.
Asynchronous Motor; DSP; Vector Control; Frequency Control of Motor Speed
U463
A
1671-7988(2016)11-92-03
陳炳文(1969-),男,廣東揭陽人,高級實驗師,研究方向為機電一體化控制技術。
揭陽市科技計劃項目(基于DSP的異步電動機矢量變換控制系統研究,項目編號201408)。
