基于AB系統的自制糾偏
2016-12-03 07:06:07商宗雪天津賽象科技股份有限公司天津300384
橡塑技術與裝備 2016年22期
關鍵詞:指令
商宗雪(天津賽象科技股份有限公司,天津 300384)
基于AB系統的自制糾偏
Self made rectification based on AB system
商宗雪(天津賽象科技股份有限公司,天津 300384)
講述了一種基于AB系統的自制糾偏,采用氣動方式控制糾偏料輥往復運動,目的是增加糾偏范圍和糾偏力度,滿足現場復雜情況對物料糾偏效果的需求。
系統模擬量;控制;氣動糾偏
1 設備基礎環境
這套糾偏方式本著在AB系統支持下,以最小的投入達到目的,計劃糾偏范圍為300 mm,糾偏速度為50 mm/s,糾偏精度為正負2 mm,采用的方式為本地1756-L62通過ETHERNET連接附近的1734-AENTR,并在1734-ppd模塊后增加了分別為1734-IE2V、1734-OE2C,兩個模擬量模塊,貝爾利C型傳感器。而機械方面采用氣缸61M2P08000400、比例閥MPYE-5-1/8-LF-010、機械傳動結構則是氣缸推動安裝在直線導軌上的導開小車來實現物料移動。
2 機械原理
在未改造之前,物料導開小車有一套氣動鎖緊裝置,它是由小車托起滑軌、縱向滑動輪、鎖緊勾、鎖緊氣缸、氣動控制件這幾部分組成的。由于導開小車上的物料會出現偏向一側或邊緣不齊等現象。我們針對此種現象研發了一種C型檢測頭固定在設備框架上檢測物料位置,而用氣缸推拉在滑行軌道上的物料小車,在物料前進的過程中通過移動物料小車,通過物料小車縱向橫移的動作,從而移動物料以達到糾偏目的(如圖1所示)。
3 程序工作原理
首先我們構思控制方式,當2個紅外線傳感器檢測到的物料位置不在中位時(相減值不是0),根據偏移距離由“位置控制模塊”折算出一個物料反向移動的速度值,和實際速度比較。在由“速度控制模塊”給出比例閥的電壓,使氣缸達到要求的糾偏移動速度,使物料恢復到中位,C 型傳感器檢測物料,氣缸推動物料,比例閥控制氣缸(如圖2所示)。

圖1 糾偏結構圖
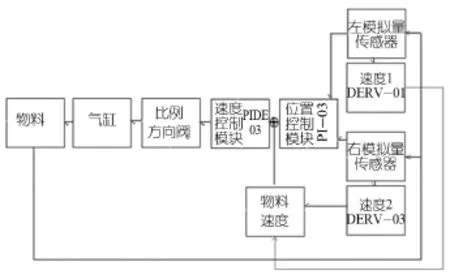
圖2 控制原理
4 系統組態
由于這套糾偏裝置是基于AB 系統下的拓展,所以我們只需要在附近的1734-AENTR模塊下找兩個空閑的模塊將1734-IE2V、1734-OE2C,兩個模擬量模塊替換添加進去,具體方式如下:
選擇遠程模塊,刪掉空閑的模塊,添加新模塊(如圖3所示)。
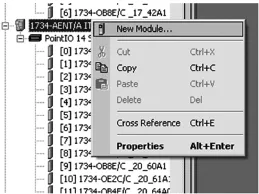
圖3 系統組態
選擇所需的模塊, 并添加倒程序中(如圖4所示)。

圖4 系統組態
這時我們要注意的是1734-IE2V模塊可以改變輸入電壓,由于我們使用的貝爾利IR-35-50-A型模擬量傳感器輸出范圍是0~2.5V,我們需把“voltage range”設定為0~10V并且記住由于傳感器只能輸出到2.5V,也就意味著我們實際能使用的最大值是400(如圖5所示)。
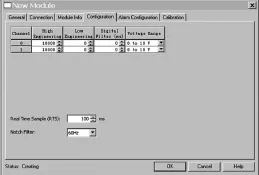
圖5 系統組態
添加1734OE2C時我們根據氣動比例閥的標準加以設置,在這里我們使用的是MPYE-5-1/8-LF-010型比例閥,它的輸入部分要求的是0~10 V,在5 V時閥處于中位。在程序中,放到了100倍,即輸出500表示為5 V。要注意的是“output Range”同樣需要設置好輸入電壓,并且修改好對應的數值。

圖6 系統組態
這時我們已經添加好模塊,下一步要做的就是模塊、傳感器和執行部分的連接。
5 接配線
貝爾利C型傳感器有棕藍黑的三根線。在這次試驗中我們將1號傳感器棕接1734-IE2V模塊的0號腳、藍接2號腳、黑色接4號腳、2號傳感器棕接1734-IE2V模塊的1號腳、藍接3號腳、黑色接5號腳,將比例閥MPYE-5-1/8-LF-010的四根線接倒1734-OE2C模塊,棕接0號腳,藍接2號腳,黑色接4號腳,白色不接。氣路部分只需要把比例閥的兩個出氣管接到氣缸上即可。
6 程序編輯
第一步,我們在Rslogix5000的框架下tasks 任務中創建周期性任務A,每100 ms執行一次。創建FBD格式的程序,并命為PIA在其中添加兩個derv微分功能塊,實現變量的計算功能需在參數中啟用以下功能:in、bypass、enableout、out、deltat(具體如圖7所示)。
然后添加兩個inputreference輸入點,兩個onpu treference輸出點,并聯系到模擬量輸入的物理地址上。
在圖8中lk∶1∶I.Ch0Data和lk∶1∶I.Ch1Data表示2個模擬量傳感器物理地址,speed_d1與speed_d2是在隨后的使用的PIDE功能塊的必要條件。

圖7 程序標簽定義

圖8 程序實現
第二步,當我們得出speed_d1, speed_d2后,就可以新建另一個FBD格式的程序,并命為PIB,首先在其中添加sub減法模塊,在這里Sub塊的作用是檢測物料在模擬量傳感器的位置是否居中。
第三步,新添一個PI計算塊,PI指令提供線性和非線性兩種計算方法,我們在這里使用常規的算法,其中比例和增益在整個輸入信號范圍內保持不變,在PI功能塊設置選項中需選擇in,kp,higlimit,lowlimit,out功能,in腳是兩個模擬量傳感器相減的值,kp是比例增益,higlimit,lowlimit則是out的最大值和最小值,它計算出的結果是將要用到的PIDE功能塊的必要條件。
第四步,創建一個ADD計算塊,在ADD功能塊設置選項中需選擇SourceA,SourceB,Dest功能,將第一步得出的speed_d1與speed_d2相加,兩個模擬量傳感器之間的差值越大,比例閥的比值也將隨之增大。
第五步,創建一個增強型 PIDE 功能塊,它使用PID 算法的速度形式。增益適用于偏差或 PV數值的變化它有很多不同的輸入和輸出。我們在這里使用的是:
EnableIn:指令使能;
PV:過程反饋變量,標度變換之后;
SPCascade:SP遠控設定值;
SPHLimit:SP設定值上限;
SPLLimit:SP設定值下限;
CVProg∶ CV手動輸出值;
ProgProgReq:編程編程請求,手動到自動或者自動到手動切換時,需要置位此位;
ProgCasRatReq:編程遠控請求,編程到遠控切換位;
ProgManualReq:編程手動請求,編程到手動切換位;
EnableOut:使能輸出;
CVEU:CVEU輸出,最大值對應100%CV,最小值對應0%CV,遠控/初始化請求有效模式下,CVEU作為PIDE調節控制變量,相當于PID指令的CV;
CV:CV輸出,手動模式下,作為PIDE調節控制變量,相當于PID指令的CV;
SP:設定值,只作為顯示;
E∶ 過程出現錯誤;
EPercent:以變化范圍百分比表示的誤差;
AUTO:自動模式顯示,在自動模式下至位;
Manual:手動模式顯示。
以上參數設定完畢后,指令如圖9所示:

圖9 PIDE指令
由于PIDE的指令標簽為結構體,因此需要更改的變量如CV上下限,P、I、D參數可通過梯形圖對其賦值。
第六步,連接調整參數后的PIDE指令輸入各管
腳,也可用梯形圖對需要的參數直接賦值(如圖10所示)。

圖10 PIDE指令控制
第七步,PIDE自整定,先讓程序在線,點擊PIDE指令,彈出如下窗口(如圖11所示)。

圖11 PIDE指令整定
程序在線,點擊PIDE屬性,彈出窗口中選擇Autotune,然后點擊Acquire Tag按鈕,獲取自整定標簽,然后設置ProcessType),PV Change Limit(PV變化極限),CV Step Size (CV階躍百分比,此值用于自整定時CV的階躍值)。最后點擊Autotune點擊Start即開始自整定,整定結束,灰色部分便可選擇,選擇合適的PID參數,點擊Set Gains in PIDE,把慢速、中速、快速響應PID參數寫入PIDE指令(如圖12所示)。
以上編輯步驟結束后,我們開始試驗設備的動作。
在第一次在運行過程中發現氣缸不能停止在某處,而是在理想狀態處正負5 mm左右抖動,經過分析得出的結果為k∶1∶I.Ch0Data和lk∶1∶I.Ch1Data的值在不斷地變化,相應的PIDE的PV值過程反饋變量也在不斷地變化,所以我們增加了一個中間變量(如圖13所示)。

圖12 PIDE參數設置
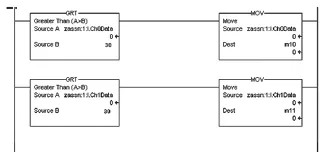
圖13 模擬量濾波
將k∶1∶I.Ch0Data和lk∶1∶I.Ch1Data只有變化幅度大于30的值才寫入到PI計算塊中,再次實驗時定位時氣缸精度達到正負1.5 mm左右,基本保證了糾偏的要求。
7 小結
這套氣動糾偏系統在使用過程中能夠達到預期目的,經濟實用,結構簡單,便于維護,機械改動小。糾偏力度和行程又可以通過增大比例閥流量和增大缸徑,加長氣缸的方法解決,解決了導開小車上物料偏移和邊緣不齊的問題。
(R-03)
TQ330.493
1009-797X(2016)22-0080-04
B DOI∶10.13520/j.cnki.rpte.2016.22.025
商宗雪(1986-),女,主要從事橡塑設備電氣自動化設備編程調試工作。
2016-09-12
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
