常規(guī)PID控制和常規(guī)模糊控制的比較
2016-12-01 21:15胡洋
科學(xué)與財(cái)富 2016年26期
胡洋

摘 要:PID控制是自動(dòng)控制領(lǐng)域產(chǎn)生最早、應(yīng)用最廣的一種控制方法,但對(duì)于大滯后、非線性的復(fù)雜系統(tǒng),常規(guī)PID控制很難保證其控制效果始終處于最佳效果,不易進(jìn)行在線的調(diào)整。模糊控制不需要確定系統(tǒng)的精確數(shù)學(xué)模型,是一種基于規(guī)則的控制。模糊控制在智能控制領(lǐng)域由于理論研究比較成熟、實(shí)現(xiàn)相對(duì)比較簡(jiǎn)單、適應(yīng)面寬而得到廣泛的應(yīng)用。本文就實(shí)際問(wèn)題對(duì)兩種方法進(jìn)行Simulink仿真,并做了分析比較。
關(guān)鍵詞:PID控制;模糊控制;Matlab仿真
1 PID控制器的設(shè)計(jì)
PID控制器傳遞函數(shù)的一般表達(dá)式為:Gc(s)=Kp+Ki/s+Kd*s,Kp為比例增益;Ki為積分增益;Kd為微分增益。
PID參數(shù)模糊自整定是找出PID中3個(gè)參數(shù)與e和ec之間的模糊關(guān)系,在運(yùn)行中通過(guò)不斷檢測(cè)e和ec,根據(jù)模糊控制原理來(lái)對(duì)3個(gè)參數(shù)進(jìn)行在線修改,以滿足不同e和ec時(shí)對(duì)控制參數(shù)的不同要求,而使被控對(duì)象有良好的動(dòng)穩(wěn)態(tài)性能。從系統(tǒng)的穩(wěn)定性、響應(yīng)速度、超調(diào)量和穩(wěn)態(tài)精度等方面來(lái)考慮Kp,Ki,Kd的作用如下:
(1)比例系數(shù)Kp的作用是:加快系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的調(diào)節(jié)精度。Kp越大,系統(tǒng)的響應(yīng)速度越快,系統(tǒng)的調(diào)節(jié)精度越高,但易產(chǎn)生超調(diào),甚至導(dǎo)致系統(tǒng)不穩(wěn)定;Kp取值過(guò)小,則會(huì)降低調(diào)節(jié)精度,使響應(yīng)速度緩慢,從而延長(zhǎng)調(diào)節(jié)時(shí)間,使系統(tǒng)靜態(tài)、動(dòng)態(tài)特性變壞。
(2)積分作用系數(shù)Ki的作用是:消除系統(tǒng)的穩(wěn)態(tài)誤差。Ki越大,系統(tǒng)的穩(wěn)態(tài)誤差消除越快,但Ki過(guò)大,在響應(yīng)過(guò)程的初期會(huì)產(chǎn)生積分飽和現(xiàn)象,從而引起響應(yīng)過(guò)程的較大超調(diào);若Ki過(guò)小,將使系統(tǒng)穩(wěn)態(tài)誤差難以消除,影響系統(tǒng)的調(diào)節(jié)精度。
(3)微分作用系數(shù)Kd的作用是:改善系統(tǒng)的動(dòng)態(tài)特性。其作用主要是能反應(yīng)偏差信號(hào)的變化趨勢(shì),并能在偏差信號(hào)值變得太大之前,在系統(tǒng)中引入一個(gè)有效的早期修正信號(hào),從而加快系統(tǒng)的動(dòng)作速度,減少調(diào)節(jié)時(shí)間。
2 常規(guī)模糊控制器的設(shè)計(jì)
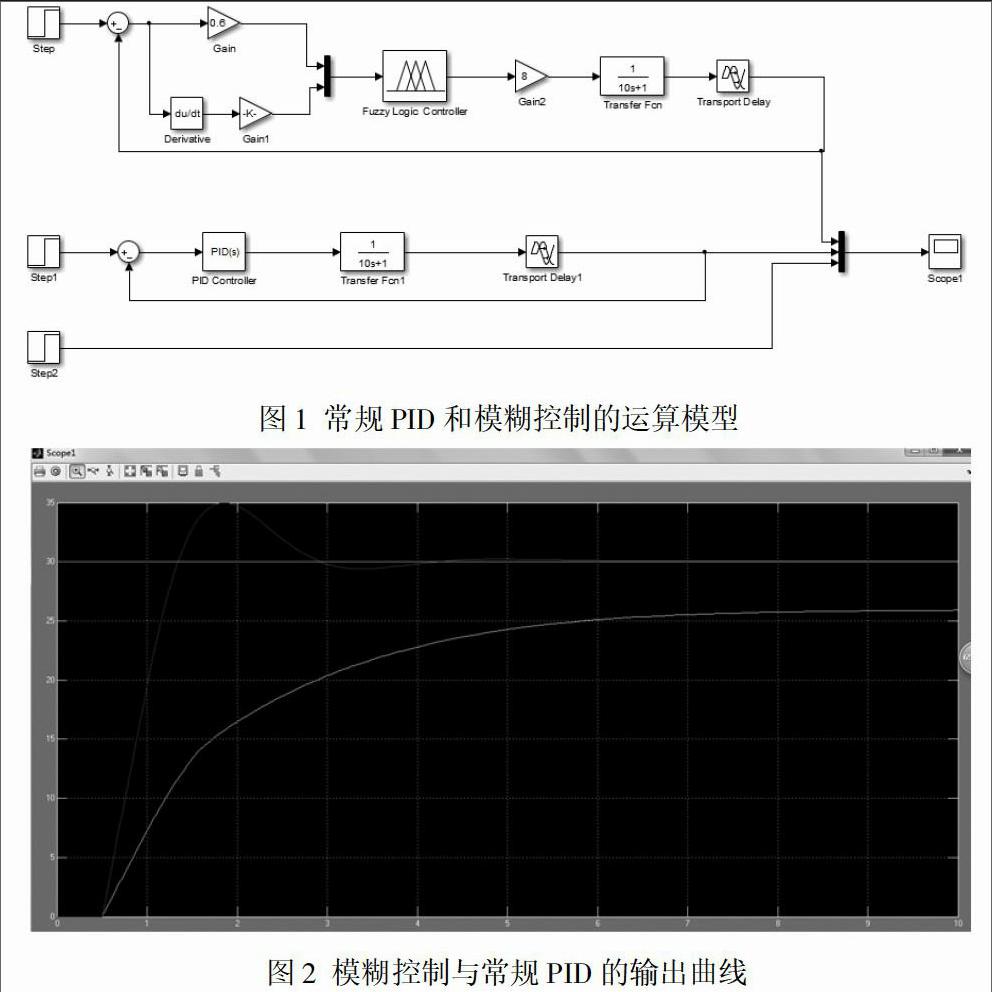
Matlab中的Simulink仿真圖如下:在Matlab的命令窗口輸入命fuzzy,進(jìn)入圖形用戶界面(GUI)窗口。根據(jù)隸屬度函數(shù)和控制規(guī)則,利用模糊推理系統(tǒng)(FIS)編輯器可以建立一個(gè)FIS文件。這里模糊推理及其非模糊化方法采MIN-MAX重心法,這里模糊控制器的結(jié)構(gòu)變量取FLC,誤差的量化因子Ke取0.6,誤差變化的量化因子Kc取0.05控制輸出的比例因子Ku取8。利用仿真參數(shù)對(duì)話框,可以設(shè)置相關(guān)的仿真參數(shù)。采樣周期設(shè)置為0.5秒。
模糊PID控制根據(jù)系統(tǒng)運(yùn)行的不同狀態(tài),考慮e,ec,u三者的關(guān)聯(lián),根據(jù)工程經(jīng)驗(yàn)設(shè)計(jì)模糊整定這三個(gè)參數(shù),選擇輸入語(yǔ)言變量為誤差e和偏差變化率ec,語(yǔ)言變量值取{NB,NM,NS,0,PS,PM,PB}七個(gè)模糊值;選擇輸出語(yǔ)言變量為u,語(yǔ)言變量值也取{NB,NM,NS,0,PS,PM,PB}七個(gè)模糊值,建立三者的模糊規(guī)則表如下表1。
控制器的關(guān)鍵是確定三個(gè)增益值,在Simulink中搭建PID系統(tǒng)控制模型如圖1示。
在MATLAB命令空間輸入fuzzy,彈出對(duì)話框,然后進(jìn)行設(shè)置,如圖2、3、4,設(shè)置為兩輸入一輸出結(jié)構(gòu)。
根據(jù)經(jīng)驗(yàn)設(shè)置輸入輸出的隸屬度函數(shù),設(shè)置完隸屬度函數(shù)后,按照上述模糊規(guī)則表格設(shè)置添加模糊規(guī)則。(圖2)
對(duì)比結(jié)論:通過(guò)上面的仿真,可以看出:在該題中,經(jīng)典PID控制的超調(diào)量比模糊PID控制的超調(diào)量要大,但模糊控制存在一定的穩(wěn)態(tài)誤差,干擾被大大減弱,傳統(tǒng)PID效果更理想。模糊控制器的參數(shù)非常難設(shè)定,對(duì)于給定了數(shù)學(xué)模型的控制來(lái)說(shuō),顯然常規(guī)PID其具有很大的優(yōu)勢(shì),操作簡(jiǎn)單,參數(shù)易于設(shè)定。
目前關(guān)于PID控制器參數(shù)整定的基本方法有離散模型的控制器參數(shù)整定、基于Nyquist曲線的控制器參數(shù)整定和基于傳遞函數(shù)模型的控制器參數(shù)整定。把常規(guī)PID控制和模糊控制理論相結(jié)合,可以發(fā)揮一者的特點(diǎn)和優(yōu)勢(shì),以期實(shí)現(xiàn)更好的控制效果。在Simulink下設(shè)計(jì)不同結(jié)構(gòu)的模糊控制器,在利用FIS編輯模糊控制器的過(guò)程中,可以設(shè)置不同的論域和語(yǔ)言值,不同形式的隸屬度函數(shù)及選取根據(jù)實(shí)際經(jīng)驗(yàn)和分析而得出的不同情況下的模糊規(guī)則表。如何選擇變量的合適的隸屬度函數(shù)、論域和語(yǔ)言值、模糊規(guī)則表及控制器的結(jié)構(gòu),來(lái)實(shí)現(xiàn)對(duì)系統(tǒng)在超量、上升時(shí)間、過(guò)渡時(shí)間及穩(wěn)定性等方面的最優(yōu)控制,還可以進(jìn)一步研究,進(jìn)行優(yōu)化。
參考文獻(xiàn)
[1]孫亮.MATLAB語(yǔ)言與控制系統(tǒng)仿真[M].北京:工業(yè)大學(xué)出版社.
[2]王淑青,楊樺,何濤.模糊PID復(fù)合控制在變頻空調(diào)中應(yīng)用研究[J].微計(jì)算機(jī)信息,2006,6-1.
[3]全杰,秦世引,段建民.基于Matlab命令方式的模糊控制系統(tǒng)仿真及可視化實(shí)現(xiàn)[J].計(jì)算機(jī)仿真,2002,19(3):113-114.
[4]劉金坤.先進(jìn)PID控制及MATLAB仿真(第二版)[M].北京.電子工業(yè)出社,2004.
[5]曾光奇.模糊控制與工程應(yīng)用[M].武漢.華中科技大學(xué)出版社,2006.
[6] 李友善,李軍.模糊控制理論及其在過(guò)程控制中的應(yīng)用[M].北京:國(guó)防工業(yè)出版,1993:56-72.
猜你喜歡
山東工業(yè)技術(shù)(2016年23期)2016-12-23
現(xiàn)代情報(bào)(2016年11期)2016-12-21
企業(yè)技術(shù)開(kāi)發(fā)·中旬刊(2016年10期)2016-11-12
科技視界(2016年21期)2016-10-17
西南交通大學(xué)學(xué)報(bào)(2016年3期)2016-06-15
科技視界(2016年12期)2016-05-25
電子制作(2016年21期)2016-05-17
通信電源技術(shù)(2016年5期)2016-03-22
考試周刊(2016年11期)2016-03-17
電源技術(shù)(2015年11期)2015-08-22
