新算法
2016-12-01 02:58:34
傳感器世界 2016年3期
新算法讓智能汽車更精準檢測行人
時至今日,汽車防碰撞系統和實驗性質的無人駕駛汽車依靠的是雷達等傳感器來檢測路上的行人。加州大學圣地亞哥分校的 Nuno Vasconcelos 團隊研發了一套基于視覺信號進行實時探測的行人檢測系統,這套視頻系統能使智能汽車更精準檢測行人,成本也更加便宜。
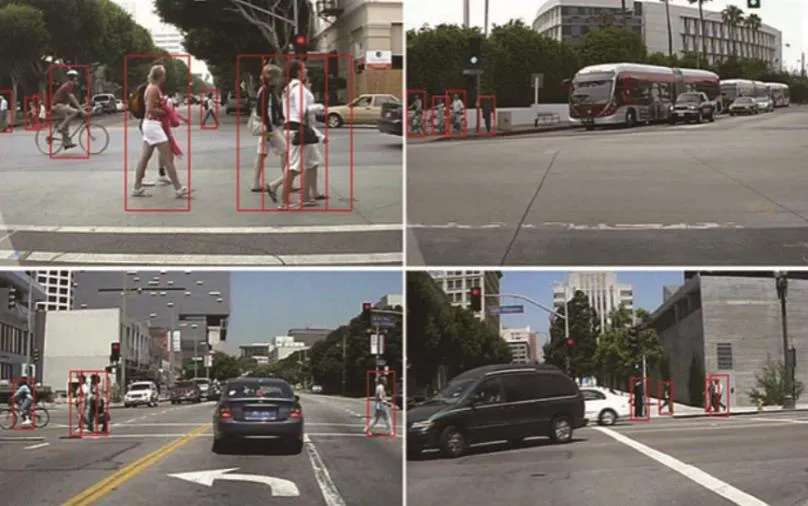
基于視覺的汽車安全系統在應用中仍然難以實現,一方面,通過計算機視覺算法能快速檢測路上的行人,但是在區分行人和類似物體等復雜情況下,依然不夠成熟。另一方面,機器學習算法(又稱深度神經網絡)仿照人腦行為,研究人員能夠訓練出比之前方法更富辨別力,處理復雜的模式識別,但是在實時的行人檢測上處理的效率太慢。
Nuno Vasconcelos 的新算法,可以通過 2~4 frame/s的速度檢測行人的變化,有效避免行人突然停止移動而出現的緊急剎車或造成意外事故。
這套系統的關鍵在于可以識別更加復雜的路況。與其他類似的系統相比,該算法的系統出錯率只有前者的一半,而且計算能力更加突出,能在遠處對行人的移動進行預判。研究小組計劃未來讓系統變得更加實用:不僅應用于車輛,還能應用于機器人、安全攝像頭等設備。
新建正則化參數選取模型有助低劑量CT的研制
由于成像質量好,空間分辨率高, CT技術已成為一種廣泛使用的醫療檢查和輔助診斷方法。然而過高的X射線輻射劑量可導致某些基因疾病,對身體健康造成極大隱患。因此CT掃描設備的設計需要考慮降低輻射劑量,減少探測器采集的投影數據是一個降低劑量的有效方法。但這種方法形成的不完全投影數據在利用傳統解析算法(比如濾波反投影算法)進行重建時,由于采樣率無法滿足香濃柰奎斯特采樣定理要求,重建圖像會有嚴重的混疊偽影,極大地影響了成像質量。
源于2006年提出的壓縮感知(compressed sensing)理論,字典學習方法利用醫學圖像中的稀疏先驗信息,能夠有效地求解這一類不完全投影數據的重建問題,在濾除重建圖像中噪聲的同時,能夠高質量還原圖像中的細節信息。然而,重建算法中的關鍵參數——正則化參數的確定并沒有系統的選取準則,利用經驗選取的方法需要通過大量重復的測試選取合理的參數,耗時長且效率低下。
蘇州生物醫學工程技術研究所的章程等人提出了一種利用CT投影數據自動確定正則化參數的函數模型。利用投影數據在正則化參數無窮大的情形下得到的重建圖像,計算出能夠反映投影數據噪聲水平和待重建圖像結構特征的參數,將其與經驗選取的正則化參數利用函數擬合的方法得到正則化參數選取模型。
實驗結果表明,正則化參數選取模型具有比較高的準確性,與模型選取的參數相比,較小的參數會使重建圖像產生條形偽影和較高的噪聲水平,較大的參數會使重建圖像信噪比和空間分辨率降低。與其他對比算法的比較結果表明,文中提出的算法能夠求解不完全投影數據的CT圖像重建問題,重建圖像的質量也有一定的提高。新型的高質量重建算法的研究對未來低劑量CT的研制有著重要的意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34