微型航姿系統(tǒng)抗加速度干擾姿態(tài)估計(jì)研究
2016-11-30 07:14:06
傳感器世界 2016年12期
桂林電子科技大學(xué) 電子工程與自動(dòng)化學(xué)院,廣西桂林 541004
一、引言
小型無人機(jī)采用的航姿參考系統(tǒng)(Attitude and Heading Reference System,AHRS)利用3軸加速度計(jì)、3軸陀螺儀和3軸磁強(qiáng)計(jì)分別測(cè)量重力場(chǎng)、地磁場(chǎng)和載體角速度矢量,并由此估計(jì)載體姿態(tài)(包括航向角、俯仰角與橫滾角)[1-4]。然而,3軸加速度計(jì)的讀數(shù)實(shí)際上是重力加速度與載體運(yùn)動(dòng)加速度的矢量和。因此,當(dāng)無人機(jī)處于加速狀態(tài)時(shí),重力觀測(cè)值會(huì)受到運(yùn)動(dòng)加速度的干擾,進(jìn)而影響AHRS航姿精度。
以AHRS中最常用的EKF(擴(kuò)展卡爾曼濾波)姿態(tài)估計(jì)算法[1-4]為基礎(chǔ),本文對(duì)抑制運(yùn)動(dòng)加速度干擾的方法進(jìn)行了理論分析,并討論了航姿誤差的收斂性及其改進(jìn)措施。通過仿真和實(shí)驗(yàn)對(duì)各種方法進(jìn)行了對(duì)比,結(jié)果表明對(duì)運(yùn)動(dòng)加速度進(jìn)行外部估計(jì)所需計(jì)算量最小,且補(bǔ)償效果最佳,適合實(shí)際應(yīng)用。
二、算法分析
1、EKF姿態(tài)算法
采用EKF進(jìn)行姿態(tài)估計(jì),首先需選擇合適的姿態(tài)表示方式來構(gòu)造狀態(tài)向量。除了常用的歐拉角(包括航向角、俯仰角和橫滾角)、姿態(tài)四元素及方向余弦矩陣(DCM)外,采用乘性姿態(tài)誤差可最大限度地降低EKF狀態(tài)向量的維數(shù)[5]。以乘性姿態(tài)誤差及陀螺儀零漂作為狀態(tài)變量,EKF的狀態(tài)方程可寫為:

其中,α —乘性姿態(tài)誤差;
δb—陀螺儀零漂;
wα—乘性姿態(tài)誤差的狀態(tài)噪聲;
wb—陀螺儀零漂的狀態(tài)噪聲;
Ω×—角速度 ω 的叉乘矩陣(即 Ω×α=ω × α)。
EKF的量測(cè)方程如下:

vg—重力的量測(cè)噪聲;
vh—磁場(chǎng)的量測(cè)噪聲。
2、運(yùn)動(dòng)加速度估計(jì)及補(bǔ)償方法
可將運(yùn)動(dòng)加速度作為EKF狀態(tài)向量的一部分,由EKF進(jìn)行估計(jì)[6-8];也可將運(yùn)動(dòng)加速度的估計(jì)置于EKF外部[9,10]。由此可將運(yùn)動(dòng)加速度的估計(jì)與補(bǔ)償方法分為內(nèi)部估計(jì)法和外部估計(jì)法。
記運(yùn)動(dòng)加速度為a,將a作為狀態(tài)變量,則內(nèi)部估計(jì)法的EKF狀態(tài)方程為:
其中,wacc—a的狀態(tài)噪聲。
狀態(tài)向量中加入運(yùn)動(dòng)加速度后,EKF的量測(cè)方程變?yōu)椋?/p>
另一方面,外部估計(jì)法不改變EKF結(jié)構(gòu)設(shè)計(jì),即仍采用式(1)與式(2)實(shí)現(xiàn)EKF算法。

在k時(shí)刻,利用上一時(shí)刻的運(yùn)動(dòng)加速度估計(jì)值對(duì)加速度計(jì)讀數(shù)(比力)進(jìn)行修正,得到當(dāng)前時(shí)刻的重力觀測(cè)值

綜上所述,外部估計(jì)法通過不斷地交替利用式(5)與式(6),即可實(shí)現(xiàn)運(yùn)動(dòng)加速度的估計(jì)與補(bǔ)償。
3、討論
內(nèi)部估計(jì)法由于將運(yùn)動(dòng)加速度納入EKF狀態(tài)向量中,使得濾波器維數(shù)增加,因而所需存儲(chǔ)量和計(jì)算量都會(huì)隨之顯著增大。相比之下,外部估計(jì)法只需計(jì)算式(5)與式(6),對(duì)存儲(chǔ)量與計(jì)算量的影響很小。因此,外部估計(jì)法比內(nèi)部估計(jì)法更簡(jiǎn)便易行。
內(nèi)部估計(jì)法和外部估計(jì)法實(shí)際上都將運(yùn)動(dòng)加速度序列{ak}作為白噪聲驅(qū)動(dòng)的隨機(jī)游走過程處理,即任意相鄰時(shí)刻的運(yùn)動(dòng)加速度改變量為正態(tài)隨機(jī)變量:

在動(dòng)態(tài)條件下,載體的運(yùn)動(dòng)加速度在不斷變化,因此估計(jì)算法本身必須能很好地跟蹤運(yùn)動(dòng)加速度的變化。這是影響運(yùn)動(dòng)加速度估計(jì)與補(bǔ)償效果的關(guān)鍵因素之一。
對(duì)于內(nèi)部估計(jì)法,式(3)中的wacc即反映了運(yùn)動(dòng)加速度變化的劇烈程度。因此,wacc的協(xié)方差取值必須足夠大,才能保證運(yùn)動(dòng)加速度的估計(jì)值能夠較好地跟蹤載體運(yùn)動(dòng)狀態(tài)的實(shí)際變化。
對(duì)于外部估計(jì)法,采用式(6)修正加速度計(jì)讀數(shù)時(shí),實(shí)際上使得運(yùn)動(dòng)加速度的估計(jì)誤差疊加在重力的量測(cè)噪聲之上。因此,外部估計(jì)法的效果取決于EKF算法本身在量測(cè)噪聲作用下的穩(wěn)定性與收斂性。
一個(gè)值得重視的問題是,不論內(nèi)部估計(jì)法或外部估計(jì)法,當(dāng)運(yùn)動(dòng)加速度估計(jì)值存在誤差時(shí),該誤差將持續(xù)影響重力觀測(cè)值,并進(jìn)而導(dǎo)致姿態(tài)誤差的累積和發(fā)散。
應(yīng)當(dāng)注意,ρ的取值應(yīng)小于1而接近于1。若ρ取值過小,雖可使的誤差快速衰減,但也會(huì)使得運(yùn)動(dòng)加速度的補(bǔ)償效果變差,甚至完全失去補(bǔ)償效果。
三、仿真驗(yàn)證
1、仿真條件
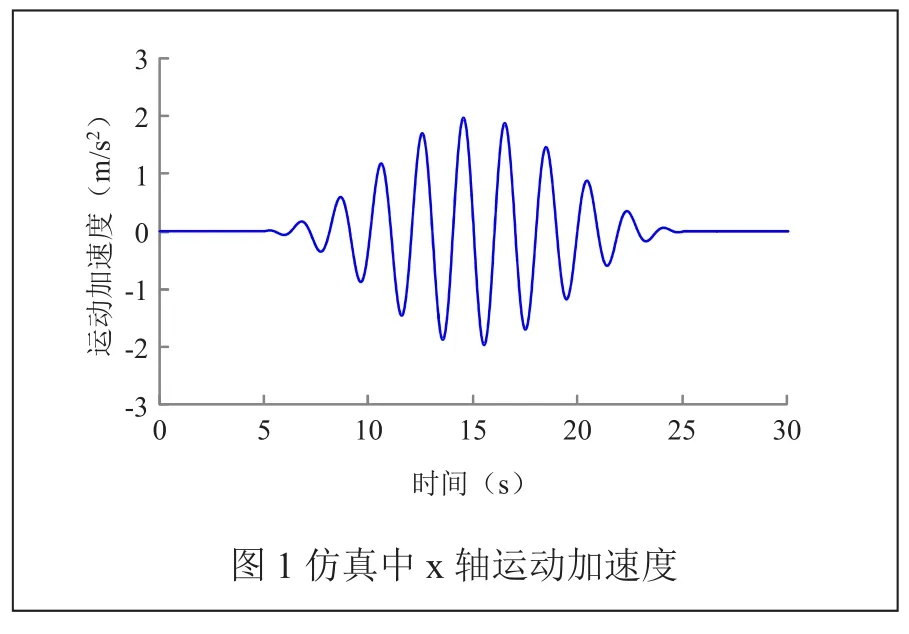
仿真中,設(shè)載體沿x軸做變速直線運(yùn)動(dòng),加速度變化規(guī)律如圖1所示。
AHRS各傳感器采樣頻率均為50Hz,其中.加速度計(jì)噪聲標(biāo)準(zhǔn)差設(shè)為0.01m/s2,磁強(qiáng)計(jì)噪聲標(biāo)準(zhǔn)差為0.1μT,陀螺儀噪聲標(biāo)準(zhǔn)差為0.05°/s,陀螺儀零漂為一階隨機(jī)游走過程(驅(qū)動(dòng)噪聲標(biāo)準(zhǔn)差為0.05°/s2)。
重力矢量取為:g=(0 0 9.8)T(m/s2)
地磁矢量取為:h=(40 0 30)T(μT)
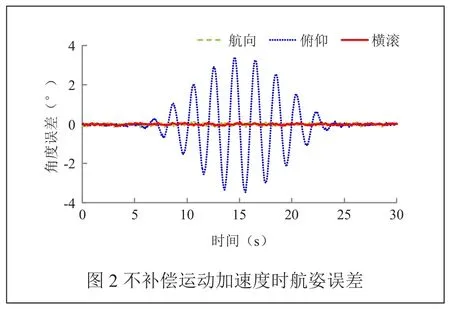
按式(1)構(gòu)造EKF算法,對(duì)運(yùn)動(dòng)加速度不作補(bǔ)償,仿真得到的航姿誤差變化曲線如圖2所示。其中,航向角、俯仰角、橫滾角的均方誤差(RMSE)依次為0.05°、1.23°和0.03°,可見沿x軸的運(yùn)動(dòng)加速度主要影響俯仰角精度。
2、內(nèi)部估計(jì)法仿真
表1給出了不同參數(shù)設(shè)定下,內(nèi)部估計(jì)法的仿真結(jié)果,包括航向角、俯仰角與橫滾角的均方誤差。
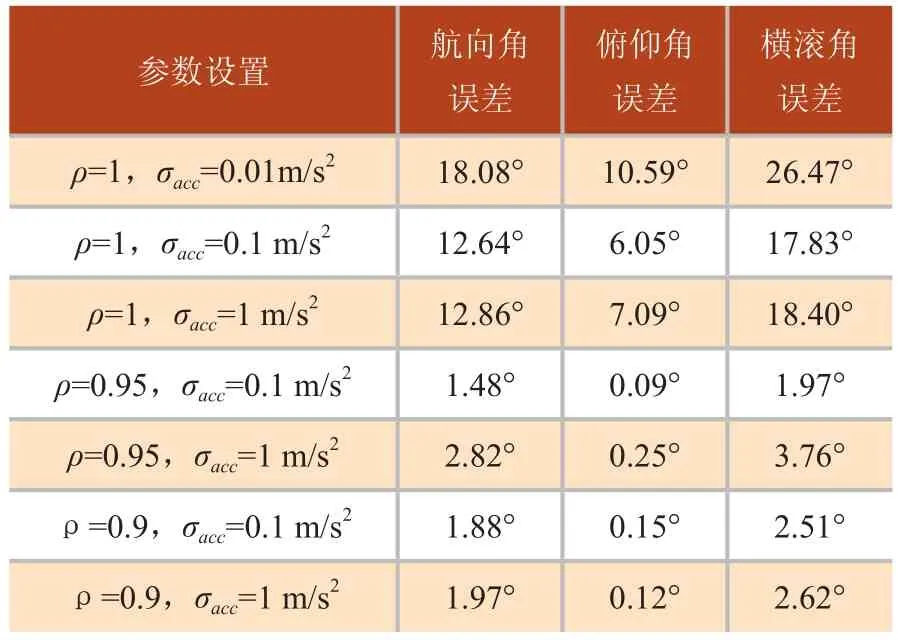
表1 內(nèi)部估計(jì)法航姿誤差(RMSE)
由表1可見,當(dāng)運(yùn)動(dòng)加速度協(xié)方差σacc取0.01m/s2且未采用遺忘因子(即ρ=1)時(shí),航姿誤差很大,表明內(nèi)部估計(jì)法此時(shí)起不到補(bǔ)償運(yùn)動(dòng)加速度干擾的作用。對(duì)應(yīng)的航姿誤差曲線如圖3所示。
如前所述,造成這一現(xiàn)象的原因有二:過小的σacc使得EKF無法跟隨載體運(yùn)動(dòng)狀態(tài)的變化,導(dǎo)致運(yùn)動(dòng)加速度估計(jì)值出現(xiàn)較大誤差;運(yùn)動(dòng)加速度的估計(jì)誤差會(huì)隨時(shí)間而累積和發(fā)散。
適當(dāng)增大σacc并引入遺忘因子ρ有利于改善補(bǔ)償效果。但由表1可見,過大的σacc(1m/s2)或過小的ρ(0.9)均會(huì)使得航姿誤差不減反增。ρ=0.95且σacc=0.1 m/s2時(shí)的補(bǔ)償效果最好,此時(shí)的航姿誤差變化曲線如圖4所示。
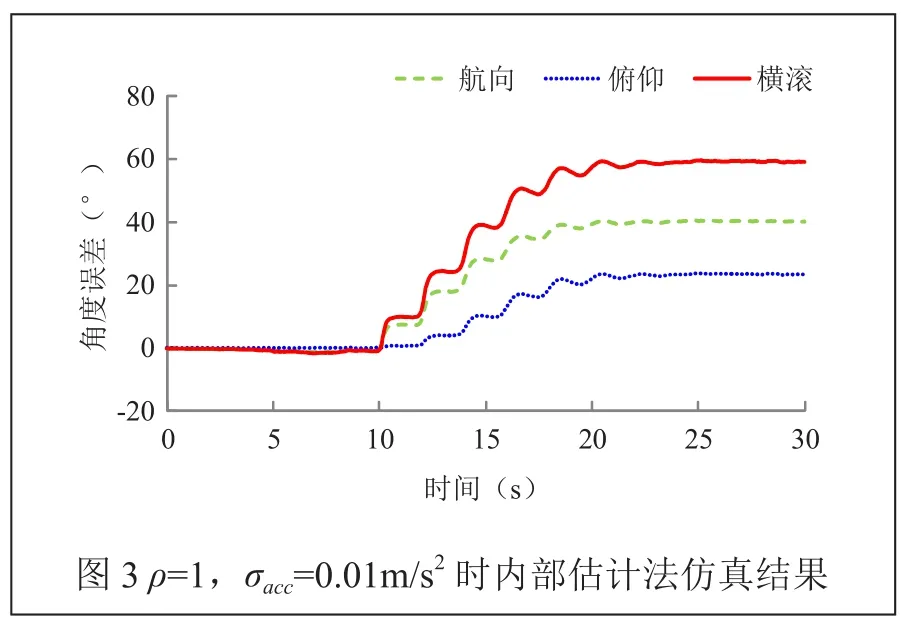
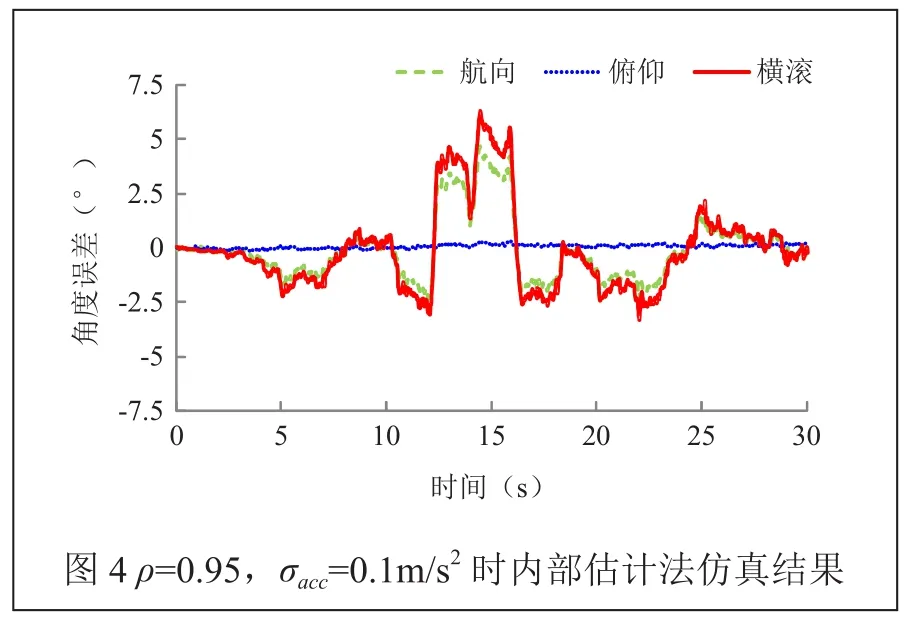
圖4所示航姿誤差與無補(bǔ)償?shù)那樾危磮D2)相比,雖然俯仰角的誤差得到了較好的抑制,然而航向角和橫滾角的均方誤差卻超過1°,說明內(nèi)部估計(jì)法的補(bǔ)償效果并不十分理想。
3、外部估計(jì)法仿真
表2為外部估計(jì)法仿真結(jié)果。與表1對(duì)比可知,外部估計(jì)法的航姿誤差總體上明顯優(yōu)于內(nèi)部估計(jì)法。
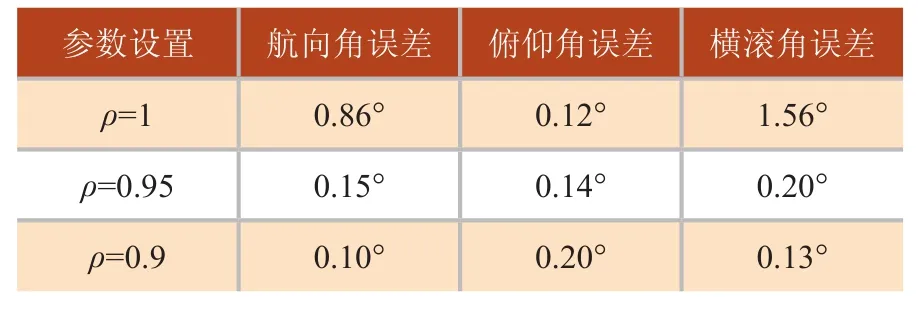
表2 外部估計(jì)法航姿誤差(RMSE)
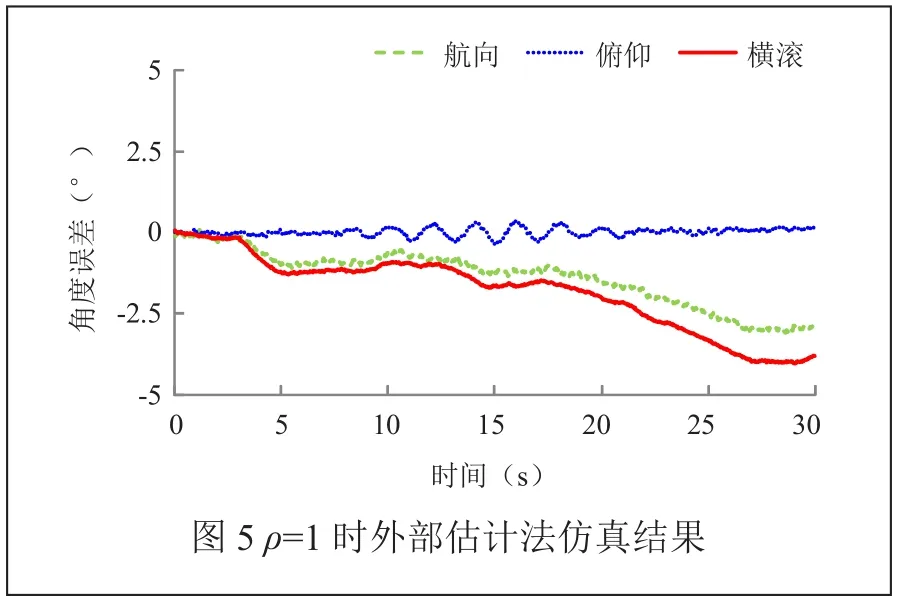
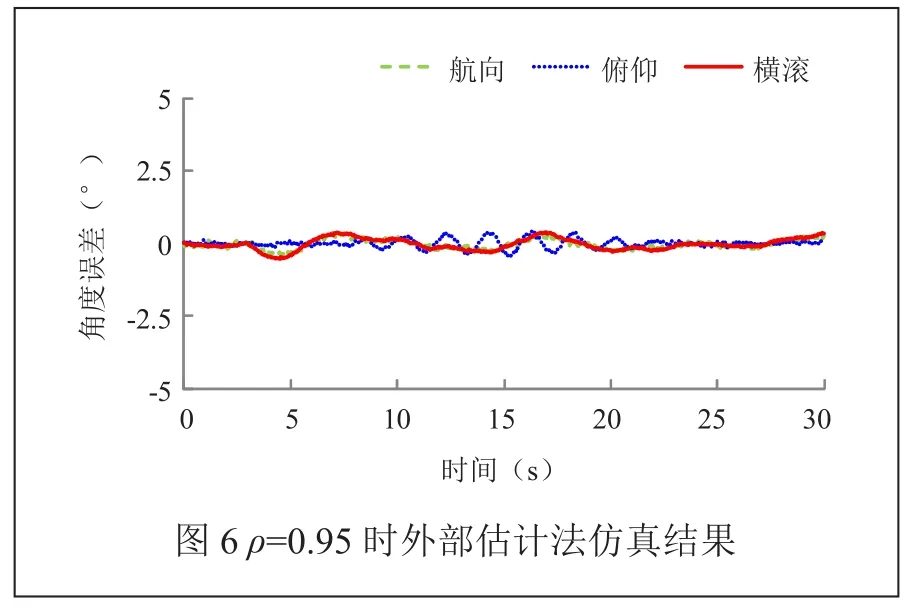
圖5和圖6分別為ρ=1和ρ=0.95時(shí)的航姿誤差曲線,可見引入遺忘因子有助于避免誤差的累積。
四、轉(zhuǎn)臺(tái)實(shí)驗(yàn)
采用基于MPU9250傳感器的AHRS進(jìn)行實(shí)驗(yàn)驗(yàn)證。MPU9250本身由3軸加速度計(jì)、3軸磁強(qiáng)計(jì)和3軸陀螺儀構(gòu)成,故又稱為9軸傳感器。
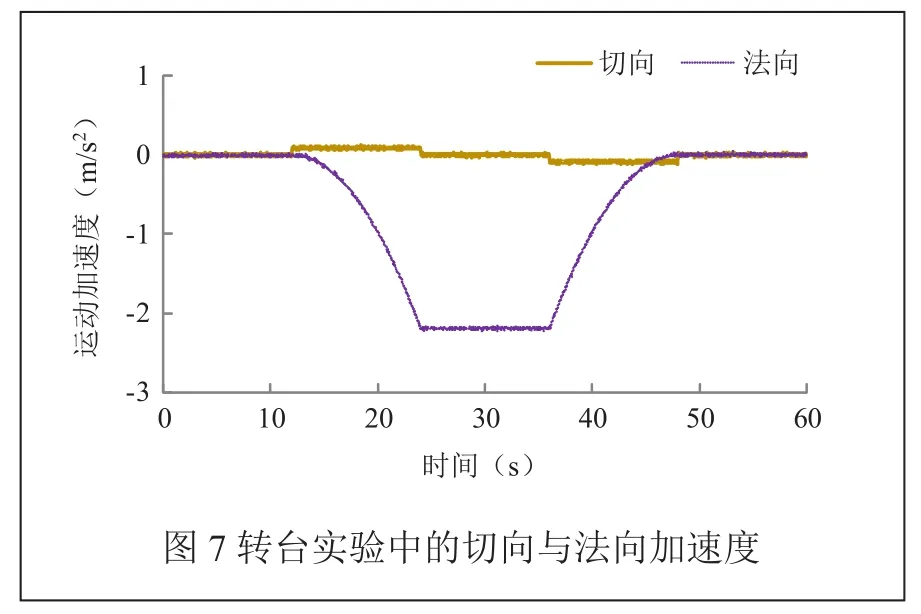
將AHRS固定于速率轉(zhuǎn)臺(tái)上,使其y軸指向轉(zhuǎn)臺(tái)軸心,x軸沿切線方向,且x、y軸均在水平面內(nèi)。轉(zhuǎn)臺(tái)繞豎直軸轉(zhuǎn)動(dòng),AHRS與轉(zhuǎn)軸的距離約為0.5m。
實(shí)驗(yàn)中,轉(zhuǎn)臺(tái)首先由靜止加速至120°/s,角加速度設(shè)定為10°/s2(即加速過程歷時(shí)12s),而后保持120°/s勻速旋轉(zhuǎn)12s,再以-10°/s2的角加速度減速至靜止。在此過程中,x軸與y軸的加速度計(jì)讀數(shù)分別對(duì)應(yīng)圓周運(yùn)動(dòng)的切向與法向加速度,如圖7所示。
傳感器采樣數(shù)據(jù)分別采用無補(bǔ)償EKF算法、內(nèi)部估計(jì)法以及外部估計(jì)法進(jìn)行航姿解算后,航姿誤差(均方根)如表3所示。由于實(shí)驗(yàn)中法向加速度較大、切向加速度相對(duì)較小,因而橫滾角受影響最大,其次是航向角(因求解航向角需先計(jì)算地磁場(chǎng)水平分量),未補(bǔ)償運(yùn)動(dòng)加速度時(shí)這兩者的均方誤差都達(dá)到4°以上。分別采用內(nèi)部估計(jì)法和外部估計(jì)法對(duì)運(yùn)動(dòng)加速度進(jìn)行估計(jì)和補(bǔ)償后,航姿誤差得到明顯改善。
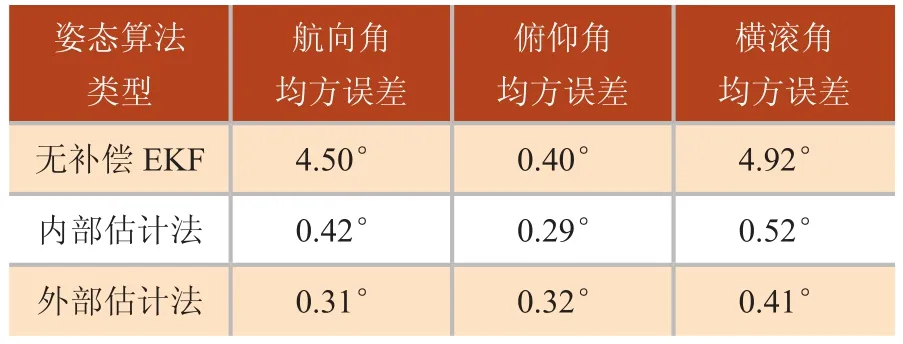
表3 AHRS實(shí)測(cè)數(shù)據(jù)濾波結(jié)果
盡管內(nèi)部估計(jì)法與外部估計(jì)法補(bǔ)償效果十分相近,但后者的計(jì)算量遠(yuǎn)小于前者,因而更為便捷實(shí)用。
五、結(jié)束語(yǔ)
本文對(duì)EKF姿態(tài)估計(jì)算法中的兩種運(yùn)動(dòng)加速度補(bǔ)償方法——內(nèi)部估計(jì)法和外部估計(jì)法進(jìn)行了分析和驗(yàn)證,通過參數(shù)調(diào)節(jié)改善了補(bǔ)償效果并保證了誤差的收斂性。仿真和實(shí)驗(yàn)結(jié)果表明,外部估計(jì)法性能更為穩(wěn)定,能很好地消除運(yùn)動(dòng)加速度對(duì)航姿精度的不利影響,且其所需存儲(chǔ)量和計(jì)算量遠(yuǎn)小于內(nèi)部估計(jì)法,具有很好的實(shí)用性。
