衛星天線伺服控制系統研究
2016-11-23 05:59:50景丹玉
工程技術研究 2016年10期
景丹玉,韓 剛
(91917部隊,北京 102400)
衛星天線伺服控制系統研究
景丹玉,韓 剛
(91917部隊,北京 102400)
在進行衛星通信過程中,天線的快速、準確、精密、穩定將會直接決定其通信質量的高低,因此需要采取措施構建一個安全、可靠、穩定的通信鏈路,以確保其通信過程的順利進行。文章對衛星天線伺服控制系統給予介紹和探討。
衛星天線;伺服控制系統;工作原理;數學模型
1 衛星天線伺服控制系統簡介
1.1 衛星天線伺服系統的工作原理
在進行衛星天線伺服系統設計過程中,要按照星載計算機預先設定的天線轉向命令,來使兩個方向天線轉向設定的位置,從而進行數據傳輸任務。其衛星天線系統常用頻段主要有C、Ku、Ka等。而衛星電視廣播常選擇C頻段。Ka頻段主要是向客戶提供千兆比特級的數字傳輸、高速的衛星通信、高清數字電視以及一些個人通信業務。以Ku頻段的機載衛星天線伺服控制系統為例,它可以高精度的快速、準確的實現對目標衛星的校正,構建安全、穩定的持續信號輸出鏈路,以實現通信服務。天線平臺和伺服平臺是雙系統的兩種平臺體制,后者具有兩個不同的正交自由的天線座,分別是俯仰天線座和方位天線座。與單平臺的設計方案相比,上述結構的設計不僅可以有效提高伺服系統的帶寬范圍,而且還能夠在一定程度上提升系統的諧振效率。衛星天線伺服系統主要由以下幾部分組成,分別是伺服電動機、限位開關、角度傳感器、伺服控制器、測速電動機、PWM伺服控制驅動器、減速器等。在伺服控制器系統中,俯仰和方位以對星開始,根據GPS數據來對計算機和衛星實現控制,并實時監測天線載機的飛行狀態,以準確的得出俯仰的角度、天線的方位等信息,通過坐標換算可以得到相應的載體坐標系角度,最后借助一定的手段進行方位閉環的調整,可以使天線準確對準衛星,從而有效的實現衛星通信。
1.2 伺服電機的特點
伺服電機屬于衛星天線伺服控制系統中比較重要的組成部分,其一般是根據預先設定好的程序進來控制機械的轉動。伺服電機一般是通過將輸入電壓轉化為矩和速度,從而控制著天線的正常轉動。伺服電機性能的好壞將會直接決定衛星天線伺服控制系統的整體性能和穩定性,以及衛星的響應速度等功能。在衛星天線伺服控制系統中,伺服電機通常會選用交流伺服電機、直流伺服電機、步進電機等。其中直流伺服電機具有噪音小、運行平穩等特點,但是機械中的交流電機轉子具有較大的損耗和阻抗,而且工作效率比較低。與相同容量的直流伺服電機進行對比發現,交流伺服電機具有相對比較大的重量和體積,在一定程度上影響其工作效率。綜上可以歸納出直流伺服電機具有過載能力大、低速力矩大、轉動慣量小、波動小、體積小、調速范圍寬、運行穩定、噪音小、效率高、可控變壓范圍大、頻率可調。此類直流電機可應用于絕大多數的衛星系統中,適用于要求嚴苛的環境。
2 衛星天線伺服系統
2.1 衛星天線伺服系統數學模型建立原則
衛星天線伺服控制系統是非線性系統,具有強耦合、多變量且內部關系復雜等特點,借助一定的手段構建一個合理的數學模型不僅可以對系統的運動規律和內部變量間的相互關系進行詳細的刻畫,而且還能夠通過模型來對其系統動態特性進行細致地了解和掌握,從而為后續工作的開展奠定良好的基礎。方位環路一般是由位置環路和速度環路兩部分組成,其中位置環處于外環,速度環為內置環。速度環的方位校正、速度的調節一般是由PWM功放中集成的模擬控制器來控制和進行的,位置環的控制通常是由預先設計好的控制器進行控制的。位置伺服環路在控制系統中位置環為外環,速度環為內環,這樣一來就組成了一個相對封閉的雙閉環系統,其不僅可以有效地發揮內環的性能,而且還能具備良好的抗干擾性和隨動性,以確保外環能夠實現快速性和定位的準確性。
2.2 伺服控制系統主程序的設計流程圖
衛星天線伺服控制系統要想穩定運行,需要保證主程序系統的各功能模塊有機地結合在一起,成為一個強大的集通信、定位、傳輸、視頻于一身的龐大衛星系統。伺服控制系統主要流程程序如圖1所示:
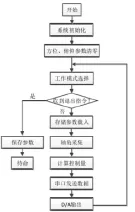
圖1 伺服控制系統主要流程
首先系統通過初始化載入一些數據,然后進行方位和俯仰參數的清零,然后工作模式,選擇合適的工作路徑來針對不同的客戶需求。當收到退出指令時則需要判斷是否還要進行下一步,如果是則返回,保存設置好的參數。反之,則需要再次存儲參數載入,然后采集軸角以及俯仰的角度和調速,經過計算機控制、處理后的數據傳送給串口,最后由D/A輸出最終的通信,為客戶和指定人群以及車載等帶去交流、定位、傳輸的日常需求。
3 結束語
對衛星天線伺服系統結構和原理進行科學分析,且對系統的各個相關元器件進行詳細的描述,做出雙閉環位置回路的數學模型,實現系統全方位的分析,使得系統達到最優的通信質量。
[1]張杰超.基于PLC的衛星天線控制系統改造方案[J].視聽,2015,(8):173-174.
[2]拜娟娟.天線控制系統在衛星地球站的應用[J].西部廣播電視,2016,(11):204+,211.
[3]潘宜芳.論衛星天線的建設及維護[J].通訊世界,2013,(6):74-75.
TN828.5
A
1671-3818(2016)10-0015-01
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
北京航空航天大學學報(2017年5期)2017-11-23 05:54:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
北京航空航天大學學報(2016年12期)2016-02-27 06:32:37
衛星與網絡(2016年12期)2016-02-05 09:23:28