基于神經網絡的非線性時變對象自適應控制方法研究
2016-11-23 00:55:15臧玉萍
化工自動化及儀表 2016年1期
臧玉萍 張 洋 孫 博
(長春工業大學 a.人文信息學院;b.基礎科學學院,長春 130122)
基于神經網絡的非線性時變對象自適應控制方法研究
臧玉萍a張 洋a孫 博b
(長春工業大學 a.人文信息學院;b.基礎科學學院,長春 130122)
針對工業控制中的非線性、時變和滯后被控對象,將神經網絡辨識器和PID控制技術有機結合,構建自適應PID控制器,并引入知識先導學習算法,提高時間效率。仿真分析表明:該自適應PID控制器能夠自動辨識被控對象模型、自整定控制參數,在辨識誤差、響應時間及超調量等指標上均有良好表現。
自適應PID控制 單神經元 神經網絡辨識器 知識先導學習算法 系統辨識 參數自整定
在工業過程控制中,許多被控對象隨負荷、環境的改變或不確定擾動的影響,表現出非線性、時變及滯后等特征,過程參數甚至模型結構都會發生變化。傳統PID控制器方法簡單,可以解決工程實踐中大量的一般性問題,但缺點是無法辨識被控對象模型變化,參數整定依賴于對象的數學模型,缺乏在線調整能力,因此限制了其在具有非線性、時變及滯后等特征的工業過程控制領域中的應用。人工神經網絡具有較強的非線性映射、信息綜合、學習記憶和自學習自適應能力,已經在非線性時變系統辨識和控制問題上得到了研究與應用[1~5]。在此,筆者將神經網絡和PID有機結合,利用三層前向神經網絡自動辨識被控過程參數,采用知識先導學習算法提高時間效率,利用單神經元自適應PID技術自動整定控制參數,構建一個具有自適應能力的PID控制系統,并以燃油加熱器為例進行仿真實驗分析。
1.1 系統描述與神經網絡模型
離散非線性系統可描述為:
y(k)=f[y(k-1),y(k-2),…,y(k-ny),
u(k-1),u(k-2),…,u(k-nu)]
(1)
式中f[·]——非線性函數;
nu、ny——u、y的階次;
u(k)、y(k)——由第k次采樣得到的系統輸入、輸出。
1.2網絡權值學習算法


(2)
可建立指標函數:
(3)
并由此得到權值系數的調整算法:
(4)
α——動量系數,α∈[0,1];
η——學習速率,η∈[0,1];
在此,引入動量系數是為了加快搜索過程,使其快速收斂于全局最小。
1.3知識先導學習算法
對于實時在線辨識的應用目標而言,時間效率的提高具有重要意義。神經網絡辨識器工作過程中,首先需要對網絡權值系數進行初始化賦值。通常情況下,可采用一組非零的隨機數作為網絡權值系數的初值,顯而易見,由隨機起點收斂到接近次優解(或滿意解)所在位置需要一段時間,考慮到導致部分系統模型變化的主要原因為外部環境條件的變化,而一般情況下此時變過程為緩變過程,因此筆者提出一種利用前次辨識得到的系統模型參數作為先驗知識來初始化網絡權值系數的知識先導學習算法,即在辨識器上增加一個用于保存前次辨識得到的系統模型參數的知識庫模塊,如圖1所示。
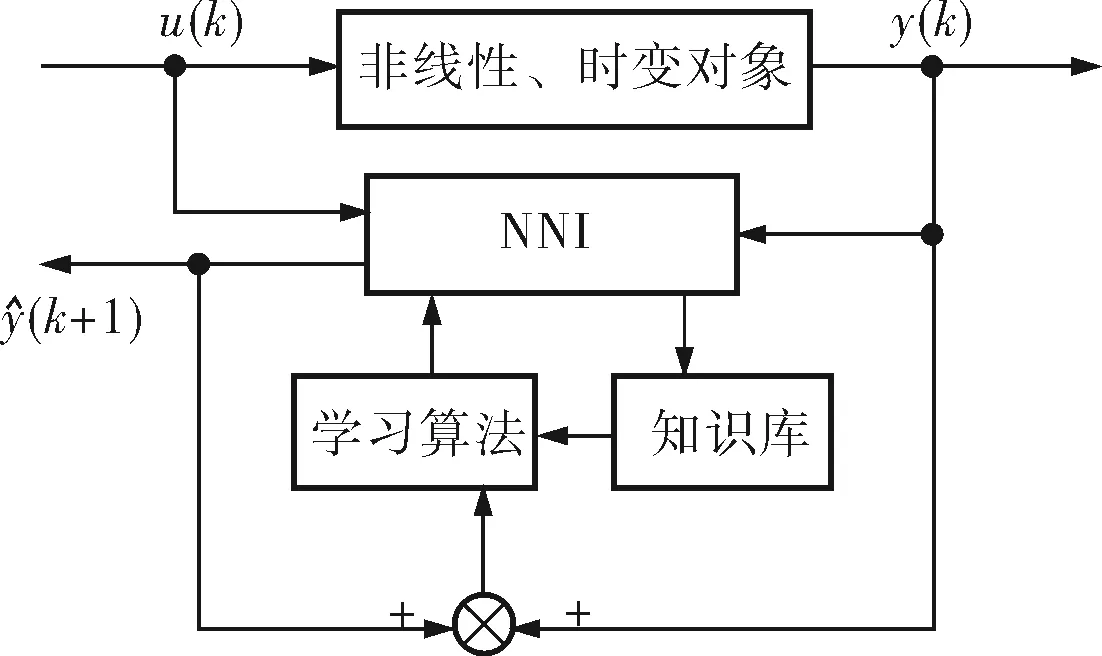
圖1 具有知識先導學習算法的辨識器結構
2 單神經元自適應PID控制器
2.1單神經元神經網絡PID控制器
經典增量式離散PID控制模型可以表述為:
Δu(k)=KPΔe(k)+KIe(k)+KD[Δe(k)-Δe(k-1)]
(5)
構建一個具有參數自整定能力的PID控制器的核心問題是實現對控制參數KP、KI和KD的實時在線調整,此問題本質上是一個優化搜索問題,因此必須建立一個具有搜索能力、可以自動調整控制參數的控制模型。神經網絡模型為解決此問題提供了一種有效途徑。圖2所示為一種由一個神經元組成的三輸入神經網絡模型。
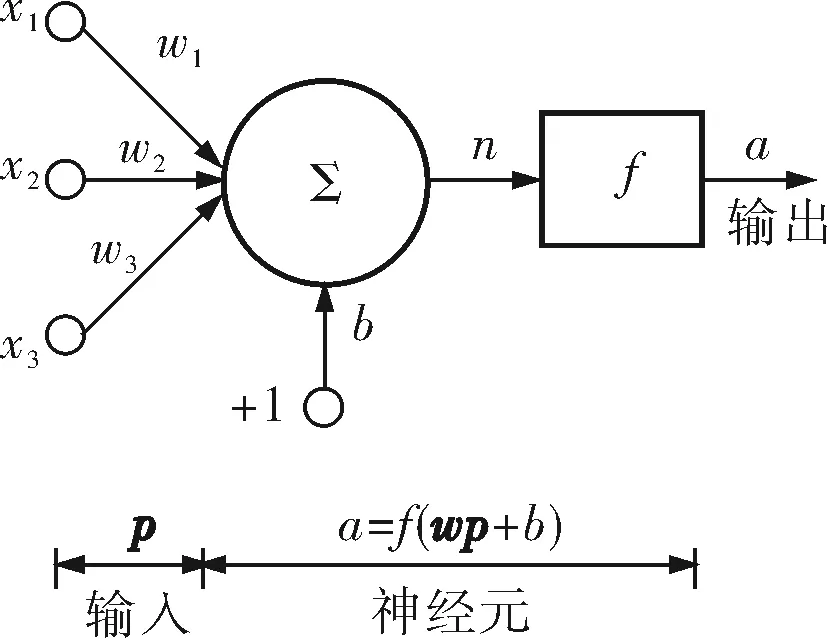
圖2 單神經元組成的三輸入神經網絡模型
該模型由一個輸入向量、一個累加器和一個傳輸函數組成,其輸入、輸出關系為:
a=f(wp+b)
p={x1,x2,x3}
w={w1,w2,w3}
(6)
式中a——網絡輸出;
b——偏值系數;
f(·)——傳輸函數;
p——輸入向量;
w——權值系數向量。
將式(6)中累加器輸出改寫成標量形式,有:
n=w1x1+w2x2+w3x3+b
x1(k)=Δe(k)
x2(k)=e(k)
x3(k)=Δe(k)-Δe(k-1)
(7)
式(5)可改寫為:
Δu(k)=KPx1(k)+KIx2(k)+KDx3(k)
(8)
比較式(7)、(8)可見,單神經元三輸入神經網絡模型的累加器輸出與增量式離散PID控制模型具有相同的輸入、輸出關系。由此可得單神經元神經網絡PID控制器模型[6,7]:
Δu(k)=w1x1(k)+w2x2(k)+w3x3(k)+b
(9)
式中b——神經網絡控制器偏置系數;
w1、w2、w3——神經網絡控制器權值系數;
Δu(k)——PID控制器增量輸出。
2.2單神經元PID控制器權值系數學習算法
控制系數的調整過程本質上是一個優化搜索過程,即在一個由無窮組解構成的w1、w2、w3三維解空間中搜尋一組可以對當前目標系統實行有效控制的滿意解的過程。最小均方(Least Mean Square,LMS)算法是最簡捷有效的搜索算法之一[8]。
LMS算法采用二次型性能指標,即:

(10)
式(10)中常數1/2的引進是為了求導后消除導數中的常系數。權值系數wi(k)的調整應沿著Jc減小的方向,即對wi(k)的負梯度方向進行搜索調整。由此可得權值系數的調整量為:

(11)
2.3神經網絡自適應PID控制器
神經網絡自適應PID控制器(圖3)主要由給定單元、調節單元、系統辨識單元及輸出與執行單元等組成。核心技術是NNI和NNC兩個模塊。NNI的主要功能是實時在線辨識被控目標系統,并以辨識器輸出預報值對辨識器輸入偏導數的形式提供辨識結果,供神經網絡控制器調整修正控制參數用。NNC是一個具有自適應能力的PID控制器,可以根據被控目標系統的變化情況,實時在線整定控制器的比例、微分、積分控制參數,同時實施對被控目標系統的控制。
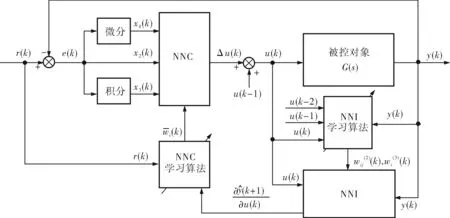
圖3 神經網絡自適應PID控制器結構
3 仿真分析
3.1神經網絡辨識器的仿真分析
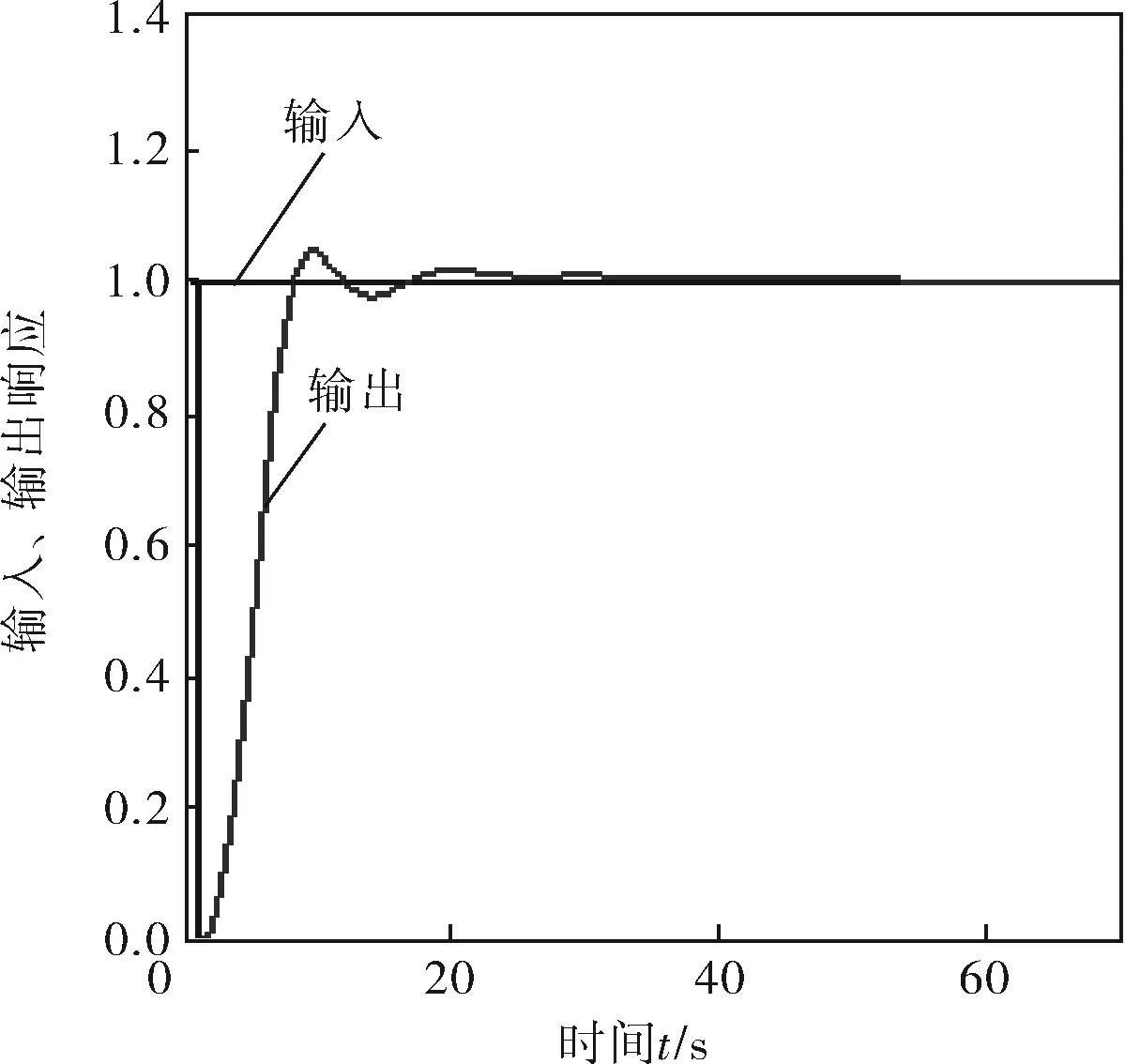
以某燃油加熱器為被控對象,其特性隨負載、環境溫度變化而變化,具有典型的非線性、時變和滯后特征。圖4所示是在-10℃未開車內暖風條件下的某燃油加熱器的開環輸入、輸出響應曲線,具有S形特征,用三階函數描述為:
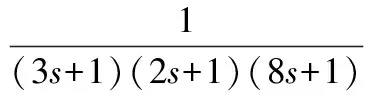
(12)
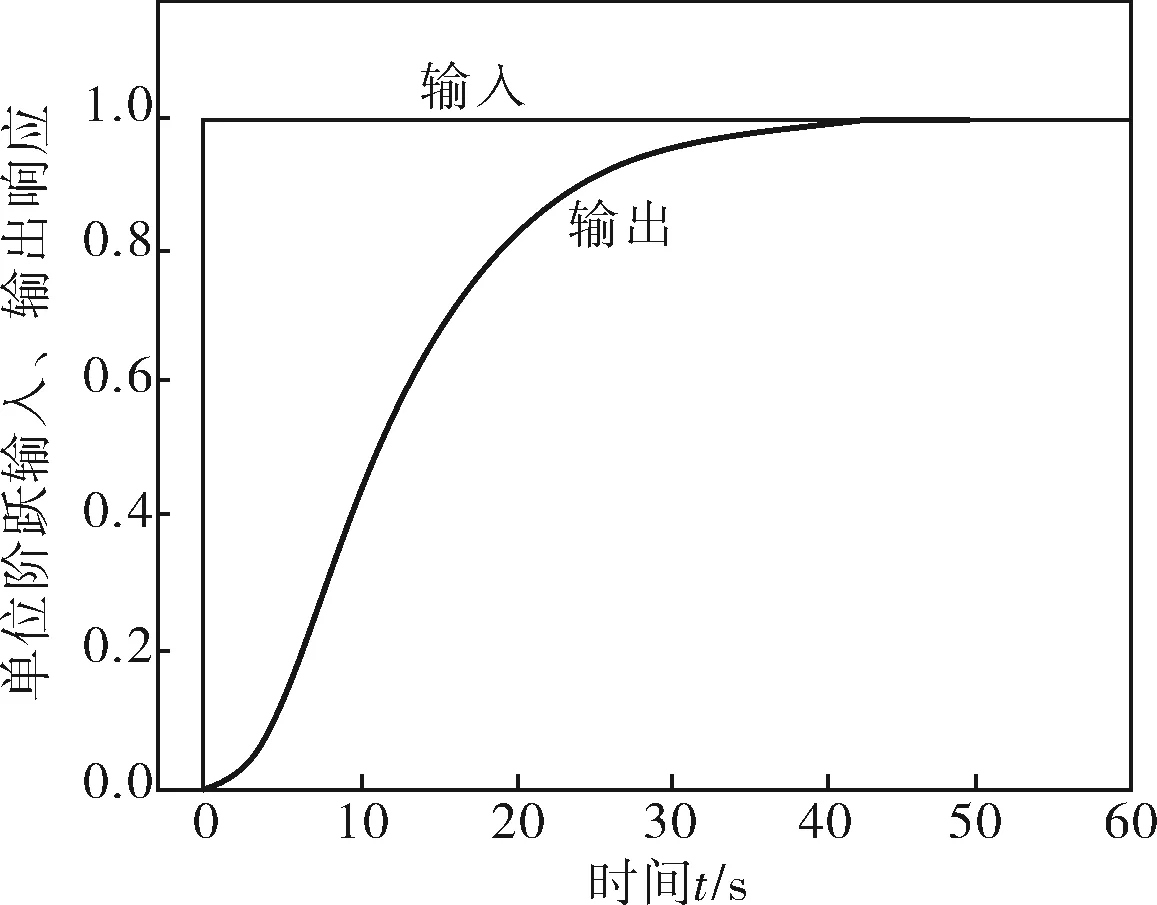
圖4 燃油加熱器開環輸入、輸出響應曲線
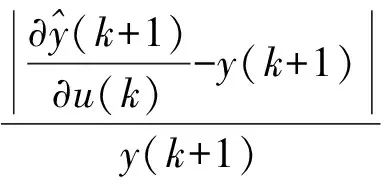
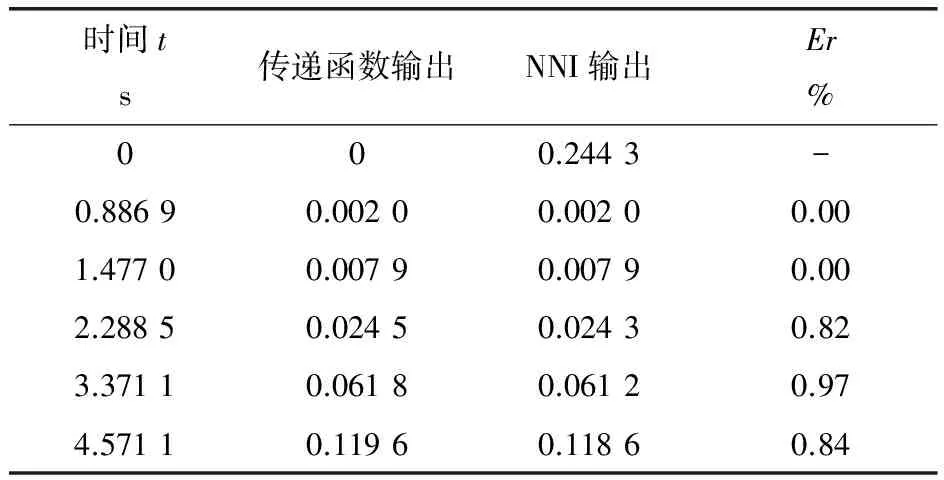
表1 辨識器Simulink仿真結果
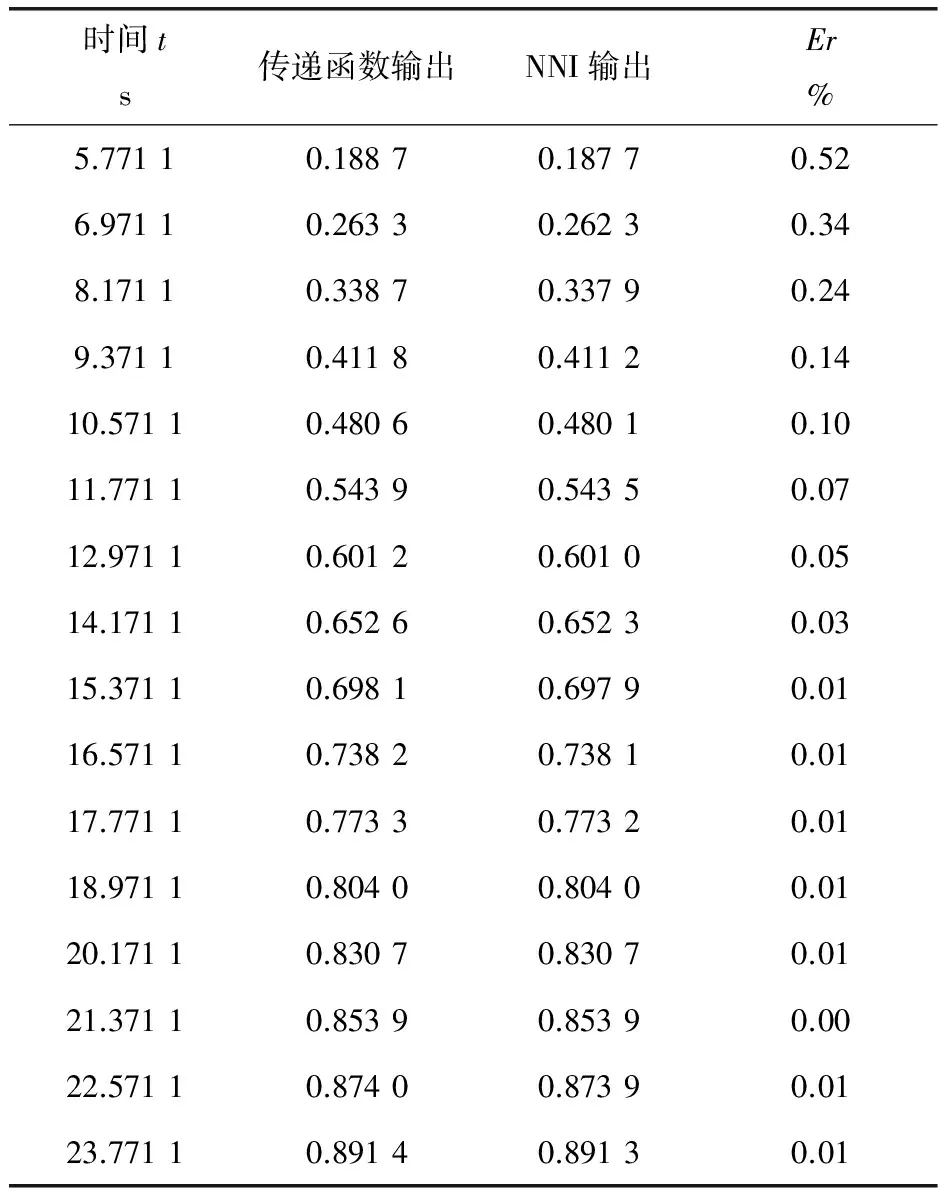
(續表1)
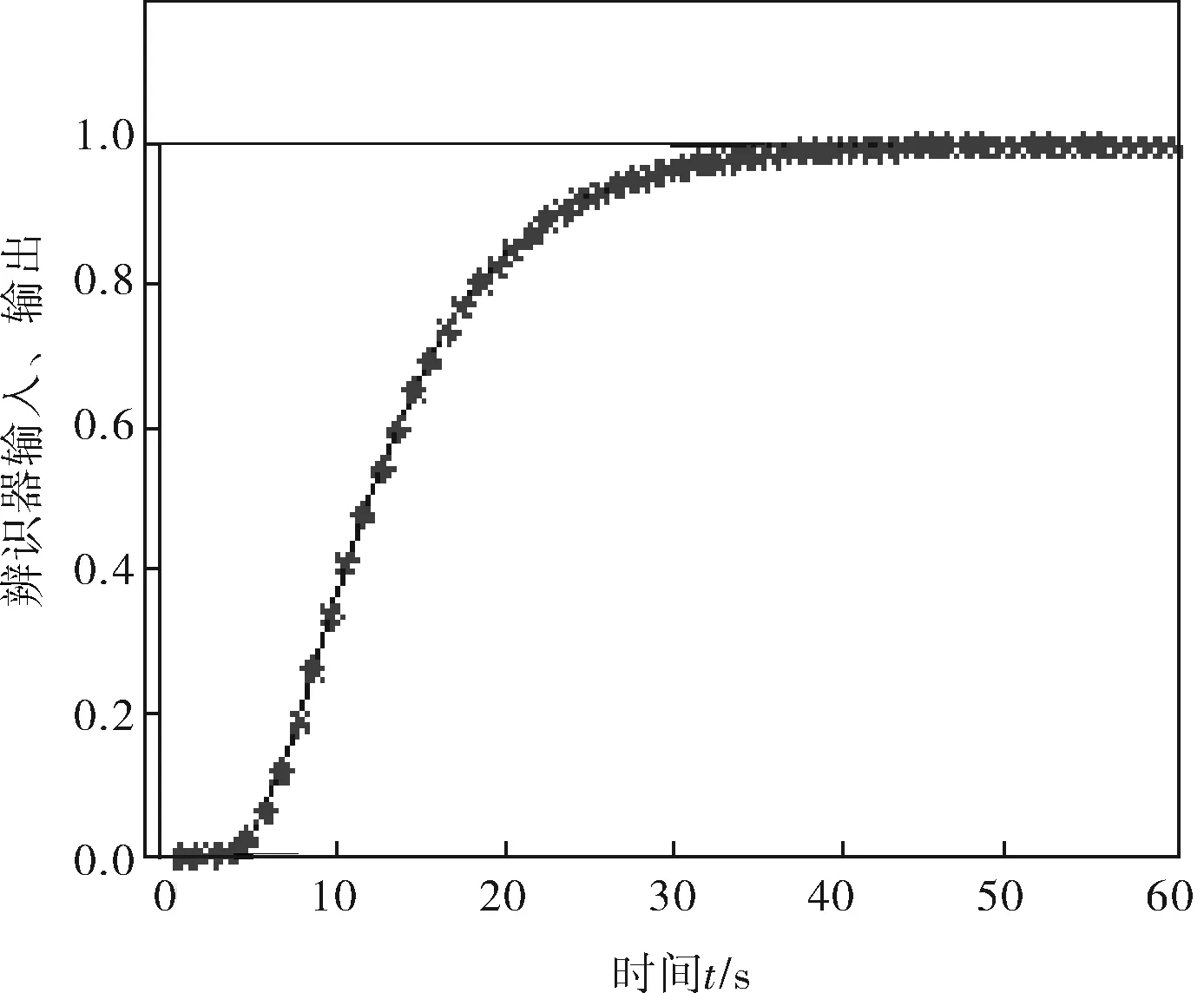
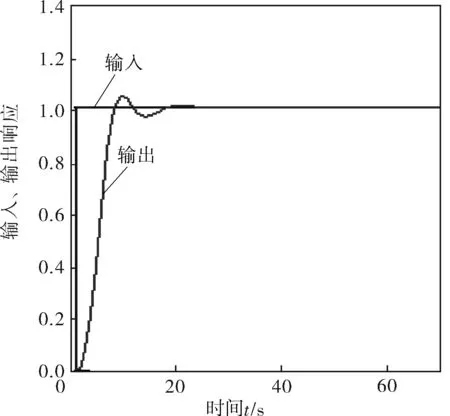
圖5 辨識器輸入、輸出曲線
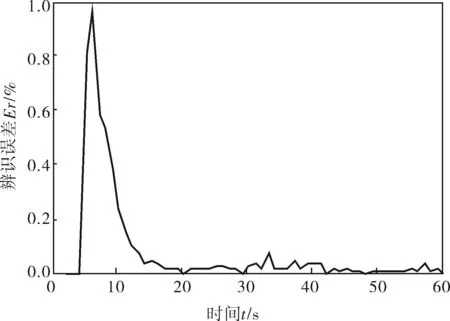
圖6 辨識誤差曲線
分析NNI仿真數據可知,NNI辨識器可以很好地實現對燃油加熱器的系統辨識任務,最大辨識誤差不大于1%,優于加熱器設計精度要求。
兩種初始化條件下的辨識誤差曲線如圖7所示。由圖7可知,基于知識先導學習算法的網絡權值系數初始化模型對辨識器性能有明顯改善作用;知識先導模型的最大辨識誤差降低至隨機模型的30%左右;辨識響應速度明顯提高。
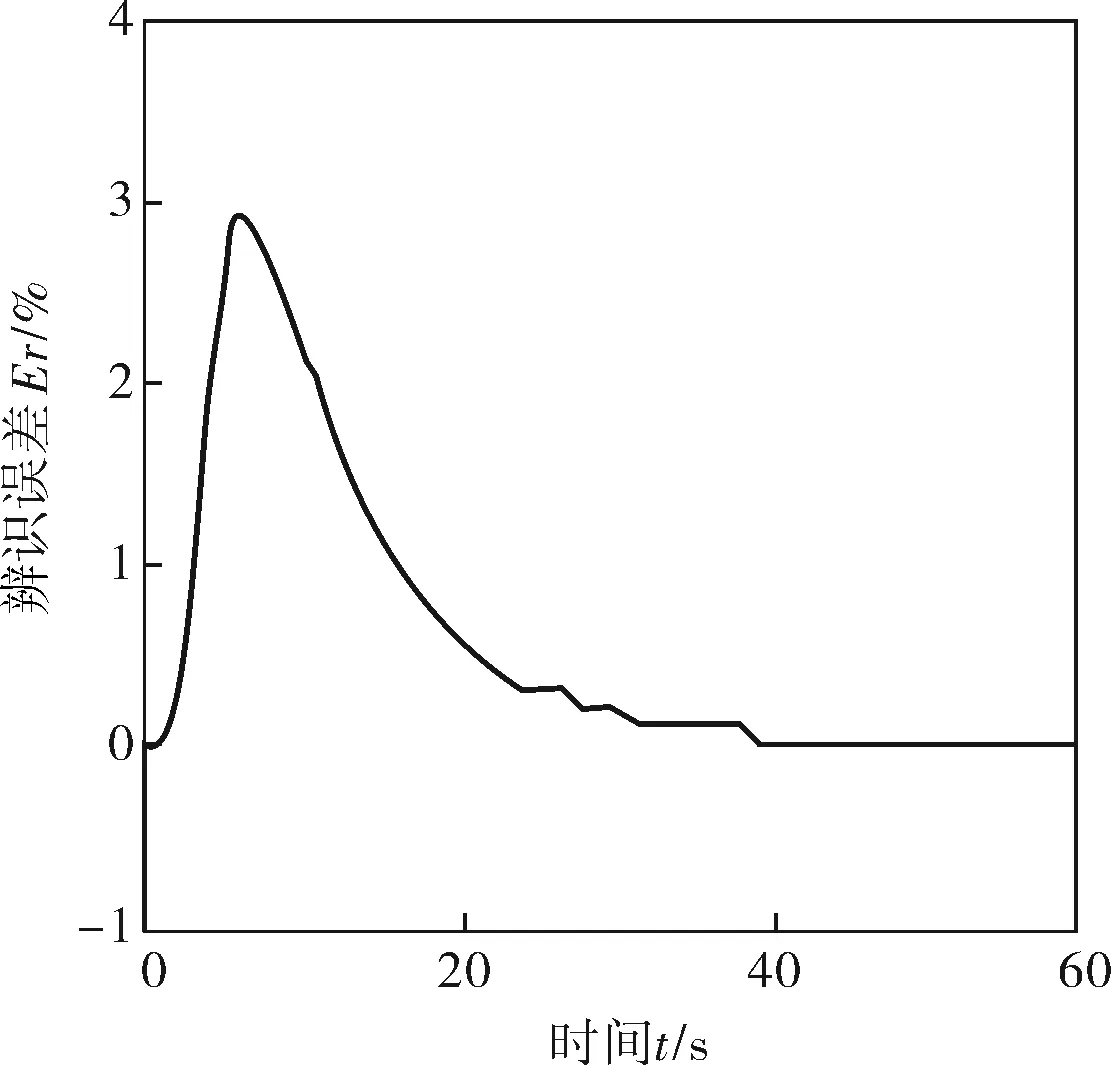
a. 隨機算法初始化網絡權值系數
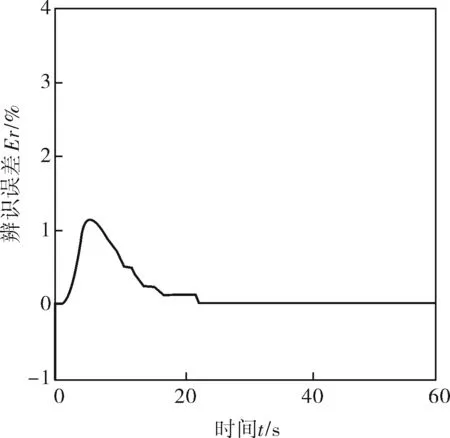
b. 知識先導學習算法初始化網絡權值系數
3.2單神經元自適應PID的仿真分析
a. 經典PID控制器
b. 單神經元自適應PID控制器
3.3神經網絡自適應PID控制器的仿真分析
構建神經網絡自適應PID控制器Matlab-Simulink,仿真過程中,由隨機函數發生器產生周期為5s、幅值為[0,5]的隨機階躍信號作為NNC系統的輸入。圖9所示為6組自適應PID控制器的輸入、輸出響應曲線,表2為該組實驗數據的分析結果。最大超調量σ為階躍響應曲線中穩態值的最大超出量與穩態值之比;峰值時間tp為階躍響應曲線超過其穩態值第一次達到峰值的時間;調節時間th為階躍響應曲線進入穩態值±5%誤差帶而不再超出的最小時間。結果表明,控制器超調量平均不大于10%,峰值時間、調整時間不大于2s,技術指標表現良好,均滿足系統設計要求。
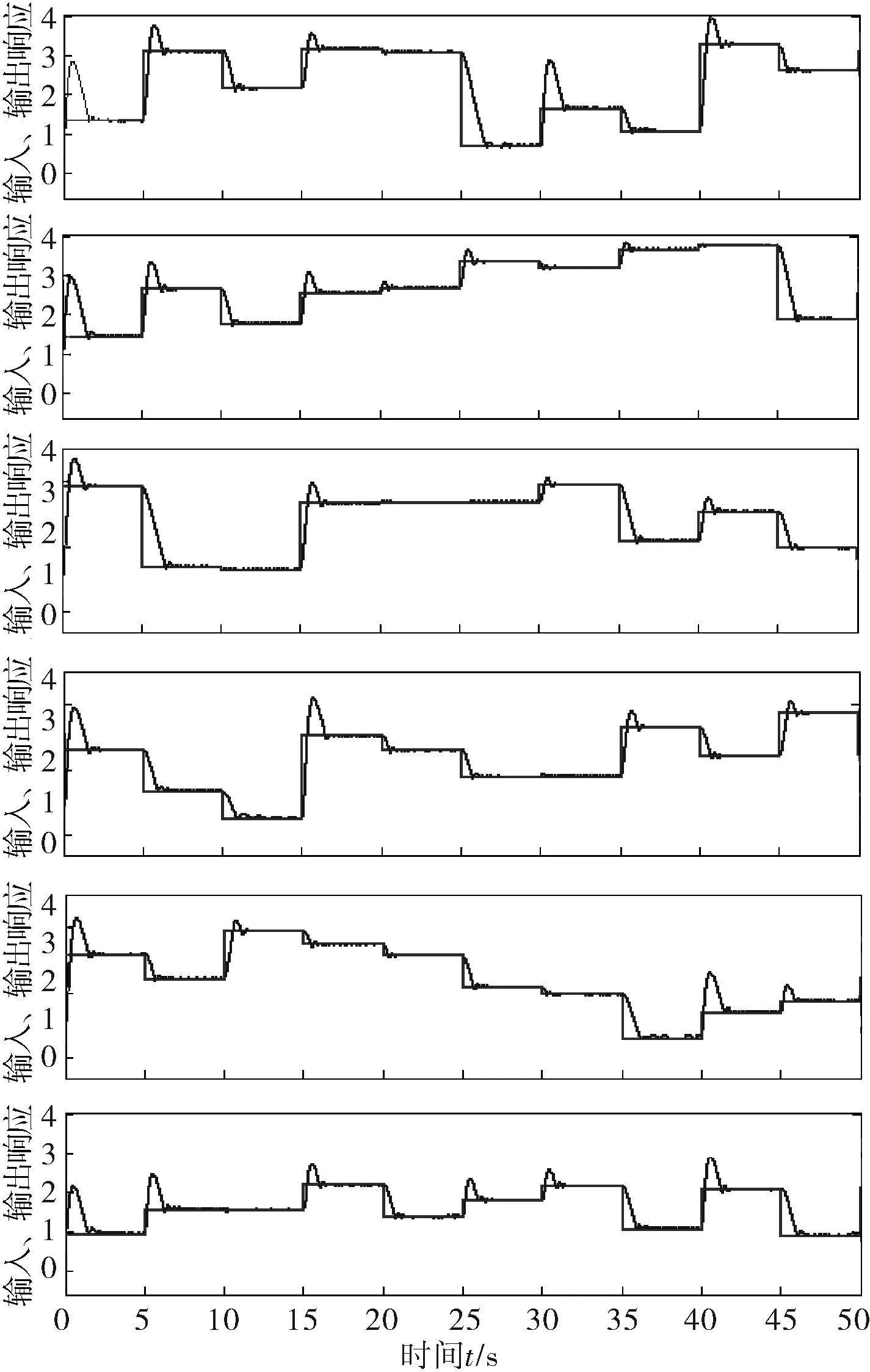
圖9 神經網絡自適應PID控制器輸入、輸出響應曲線
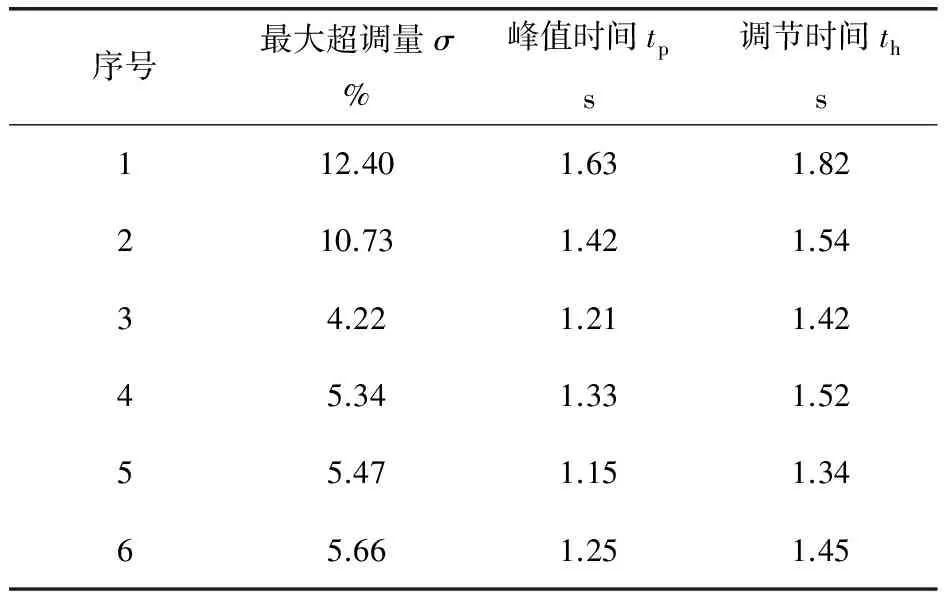
序號最大超調量σ%峰值時間tps調節時間ths112.401.631.82210.731.421.5434.221.211.4245.341.331.5255.471.151.3465.661.251.45
4 結束語
筆者將神經網絡辨識器NNI和單神經元自適應PID控制器有機結合,并引入知識先導學習算法,實現了對非線性、時變、時滯對象的參數在線辨識和PID控制參數自整定。仿真分析結果表明,該控制器辨識精度高,響應速度快,超調量小,是實現非線性、時變、時滯對象自適應控制的一種有效方法。
[1] 于開平,牟曉明.基于前向神經網絡的非線性時變系統辨識改進EKF算法[J].振動與沖擊,2010,29(8):5~8.
[2] 宋哲,陳文卿,徐志偉.基于神經網絡的懸臂梁在線辨識與振動主動控制[J].振動與沖擊,2013,32(21):204~208.
[3] 韓冰,韓敏.基于動態BP算法的非線性滯后系統辨識[J].大連理工大學學報,2010,50(5):777~781.
[4] 田一鳴,黃友銳,高志安,等.基于GA與CSA-RBF神經網絡辨識的自適應PID控制器[J].系統仿真學報,2008,20(17):4618~4621.
[5] Mazalan N A,Malek A A,Wahid M A,et al.Review of Control Strategies Employing Neural Network for Main Steam Temperature Control in Thermal Power Plant[J].Jurnal Teknologi,2014,66(2):73~76.
[6] Zheng Z Q,Wang X J,Zhang Y H,et al.Research on Neural Network PID Quadratic Optimal Controller in Active Magnetic Levitation[J].The Open Mechanical Engineering Journal,2014,8:42~47.
[7] He Y,Fei S,Li J L,et al.Multi-motor Synchronous Control Method Based on Single Neuron Adaptive PID Controller[J].Journal of Computational Information Systems,2012,21(8):8917~8927.
[8] 修海燕,閆德勤.基于神經網絡控制的LMS算法及其仿真[J].微型機與應用,2011,30(5):103~106.
ResearchonSelf-adaptiveControlMethodforNonlinearTime-varyingObjectBasedonNeuralNetworks
ZANG Yu-pinga, ZHANG Yanga, SUN Bob
(a.CollegeofHumanities&Information; b.SchoolofBasicSciences,ChangchunUniversityofTechnology,Changchun130122,China)
Aiming at the nonlinearity, time-varying and delay of the controlled object in the industrial control, having neural networks and PID control combined to build an adaptive PID controller was proposed, including the introduction of knowledge leading learning algorithm to improve time efficiency. The simulation result indicates that this controller can identify the controlled object’s model automatically and self-tune the controller parameters together with better performance in the error identification, quick response and overshoot.
self-adaptive PID control, single neural element, neural networks identifier, knowledge leading learning algorithm, system identification,self-tuning parameter
TH862+.6
A
1000-3932(2016)01-0006-06
2015-12-18(修改稿)基金項目:吉林省教育廳“十二五”科學技術研究項目(吉教科合字[2013]第525號)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19