基于COMPASS實測數據的中長基線解算性能分析
2016-11-22 09:13:00郭秋英趙吉濤趙同龍桑文剛劉慶新
山東建筑大學學報 2016年4期
郭秋英,趙吉濤,趙同龍,桑文剛,劉慶新
(山東建筑大學土木工程學院,山東濟南250101)
基于COMPASS實測數據的中長基線解算性能分析
郭秋英,趙吉濤,趙同龍,桑文剛,劉慶新
(山東建筑大學土木工程學院,山東濟南250101)
基于北斗星座的雙頻基線解算和模糊度固定方法研究,可實現中長基線的快速精密相對定位,提高GNSS在障礙環境下的應用能力。文章對17.2至55.8 km長度的4條基線的GNSS多星座實測數據進行了基線解算,從各基線觀測數據中分別提取不同時段長度的觀測數據,對比分析了基于單COMPASS星座、單GPS星座以及GPS/COMPASS組合星座的基線解算結果。結果表明:在基線觀測時段長度達到60 min及以上的情況下,基于單COMPASS星座的基線解算結果與單GPS系統解算的結果相比沒有顯著的差別,基線北/東/高分量的偏差大部分都小于2 cm,而在觀測時段長度小于30 min的情況下,單COMPASS系統的基線解算精度低于GPS系統,基線北/東/高分量偏差達到分米級;在高衛星高度角條件(>30°)下,單COMPASS系統解算的基線精度較單GPS系統低。
北斗衛星導航系統;中長基線解算;短觀測時段;高衛星高度角;性能分析
0 引言
北斗衛星導航系統(英文簡稱“COMPASS”)是中國自主發展、獨立運行的全球衛星導航系統,于2012年底向亞太地區正式提供服務,并計劃至2020年完成全球系統的構建。至2012年底,我國已發射了16顆北斗導航衛星,其中14顆組網并提供服務,分別為5顆GEO衛星、5顆IGSO衛星和4顆MEO衛星[1-2]。自COMPASS正式啟動區域服務以來,系統運行情況總體良好,服務連續穩定,國內外許多學者對基于COMPASS星座的精密定位產生了極大的興趣[3-7]。目前,GNSS相對定位仍是高精度定位的主要方法,基于COMPASS觀測數據的精密相對定位是研究的熱點之一。
2012年前,基于北斗精密相位定位的研究主要集中于利用仿真的COMPASS觀測值進行的。Cao等評價了基于幾何模型的COMPASS模糊度解算性能,模擬了單頻、雙頻和三頻觀測值用于短、中和長基線的模糊度解算[6];Zhang等利用模擬信號研究了COMPASS短基線的相對定位,分析了浮點解和固定解的精度,結果表明模糊度固定解的精度可達厘米級水平[7]。
隨著北斗衛星系統的發展,COMPASS實測數據和星歷數據能夠容易地獲得,基于北斗精密相對定位的研究主要是利用實測數據進行的。Shi等利用在武漢采集的一周的COMPASS GEO和IGSO衛星的觀測值分析了短基線相對定位結果的精度,表明COMPASS是很有前途的[8]。唐衛明等根據武漢地區的實測數據分析了基于北斗的15 km以下的短基線相對定位,研究表明基于北斗系統的單歷元基線解算精度比基于GPS系統的精度稍低,在平面方向可達3 cm,高程方向可達6 cm[9]。唐旭等利用長度約633 m的短基線的實測數據,分別利用北斗和GPS觀測數據進行基線解算,結果表明兩者的精度相當[10]。Deng等利用在武漢地區采集的5~13 km短基線的GPS/BeiDou靜態實測數據進行了分析,結果表明與單GPS或單BeiDou系統相比,基于組合系統解算的短基線精度有明顯提高[11]。Yang等利用實測的北斗數據得到超短基線(4.2 m)的精度優于1 cm,對于8.2 km的短基線精度優于3 cm[12]。以上基于北斗實測數據的研究和算例僅包括短基線,未對中長基線的北斗實測數據進行分析。
文章分析了基于COMPASS星座的基線雙頻解算方法,利用在廣州、上海以及山西大同采集的長度從17.2至55.8 km的GNSS多星座實測基線數據進行解算,分析基于單COMPASS星座的基線解算性能,與基于單GPS星座、GPS/COMPASS組合星座的基線解算結果進行了比較,并對比分析了不同觀測時段長度下的基線解算結果,對于實現GNSS快速精密相對定位提供了一定的依據和參考;同時,也分析了基于COMPASS、GPS及組合星座的高衛星高度角情況下的基線解算結果,對于提高GNSS在障礙環境(如城市、樹林、山谷等)下的應用能力具有重要的參考意義。
1 基于COMPASS觀測值的雙頻基線解算
基線解算一般采用載波相位雙差模型,雙差觀測方程由式(1)[13]表示為

式中:λ為載波波長,m;?Δφ為雙差載波相位觀測值,周;?ΔN為雙差整周模糊度;?ΔIion為雙差電離層延遲,m;?ΔTtrop為雙差對流層延遲,m;?Δδρorbit為雙差衛星星歷誤差對距離的影響,m。
對于中長基線,殘余的雙差大氣延遲,尤其是電離層延遲可能較大,會影響相對定位的精度。利用雙頻觀測值組合,可以消除一階電離層延遲,因此常采用無電離層影響的組合觀測值解算中長基線。
載波相位觀測值的無電離層影響組合由式(2)[12]表示為

式中:φLC為無電離層影響的載波相位組合觀測值,周;φBi和φBj分別為頻率i和j上的載波相位觀測值,周。
相應的模糊度由式(3)表示為

COMPASS三頻觀測值可以組成三種無電離層影響的組合觀測值,由式(4)~(6)表示為
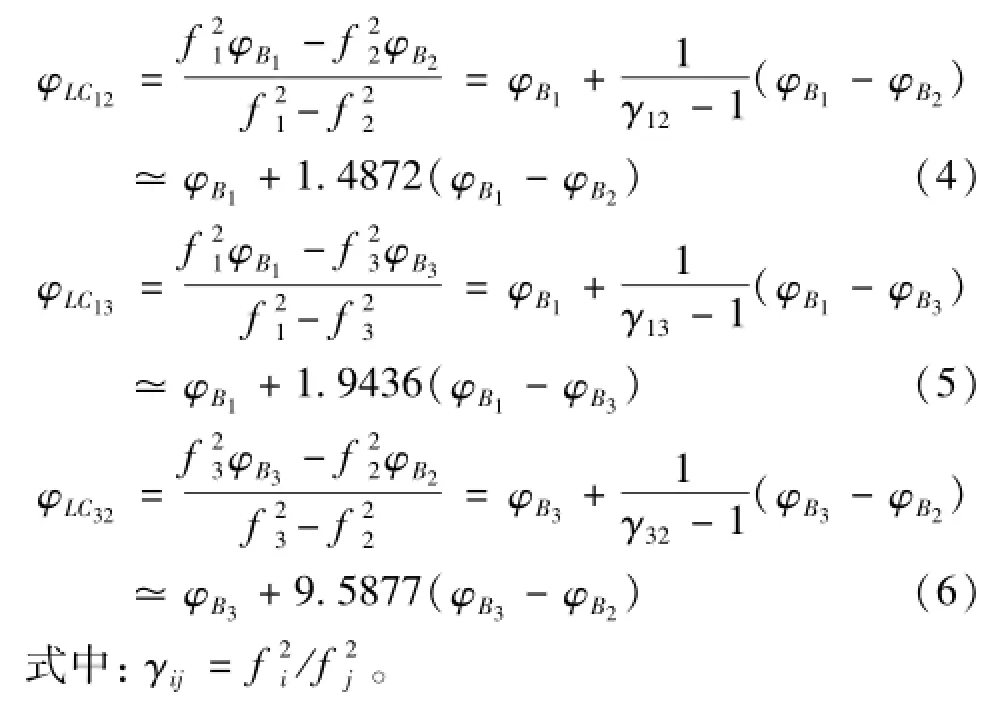
設三個頻率的非差載波相位觀測值具有相同的標準差σφ,mm;即σφB1=σφB2=σφB3=σφ,則由式(7)~(9)表示為

從以上三個組合的標準差來看,COMPASS三種無電離層影響的組合觀測值的噪聲均比單個頻率的觀測值的噪聲大幾倍甚至十幾倍,相比較而言,北斗第1頻率B1/B2北斗第2頻率無電離層影響的組合觀測值噪聲最小,從理論上來講,最有利于基線的計算。因此,在基線解算中,采用B1/B2無電離層影響的組合觀測值。
根據式(1)基于無電離層影響的載波相位組合觀測值的雙差觀測方程由式(10)表示為

式中,?ΔφLC為無電離層影響的載波相位組合雙差觀測值,。
設σφ=2 mm,結合(7)式,則B1/B2無電離層影響組合的載波相位雙差觀測值的標準差為σ?ΔLC≈2.90σ?Δφ=11.6 mm
由(3)式可知,無電離層影響的組合觀測值的模糊度不具有整數性質,為便于解算,將(3)式變換為式(11)表示為
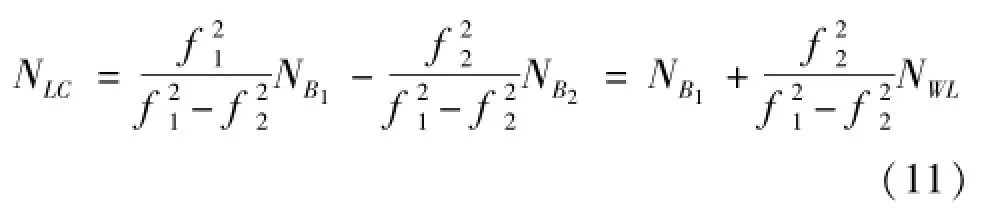
式中:NWL=NB1-NB2為B1/B2組成的寬巷觀測值的整周模糊度,其波長較長(0.847 m),較易固定,雙差NB1具有整數性質,用這種方法可以可較準確地確定無電離層延遲組合觀測值的整周模糊度。
因此,解算?ΔNLC需要兩步:首先確定雙差寬巷模糊度?ΔNWL,然后利用已確定的?ΔNWL來確定?Δ NB1。
雙差寬巷模糊度?ΔNWL的確定采用Melbourne-Wübbena(M-W)組合法解算[14-16],由式(12)表示為

式中:?ΔPB1和?ΔPB2分別為頻率B1和B2上的碼測距雙差觀測值,?ΔφWL=?ΔφB1-?ΔφB2為雙差寬巷觀測值,λWL為寬巷波長。
M-W組合不僅消除了電離層延遲,也消除了衛星鐘差、接收機鐘差和衛星至接收機之間的距離,僅受測量噪聲和多路徑誤差的影響,在存在衛星軌道誤差、站坐標誤差以及大氣延遲誤差的情況下,仍能正確固定寬巷模糊度。
寬巷模糊度固定后,B1信號的載波相位雙差模糊度用下式求解,由式(13)表示為

式中:r=f21/f22。該方法消除了觀測量中的幾何部分,僅剩余電離層影響。
一旦模糊度NWL固定,載波相位測量噪聲僅為幾mm,由(13)式可知,NB1的解算誤差主要來源于殘余的雙差電離層延遲,其精度必須優于(λ2-λ1)/2才允許模糊度直接取整,對于COMPASS星座的B1和B2信號,(λ2-λ1)/2=2.8 cm。實驗表明,即使短基線,雙差電離層延遲也很容易超過2.8 cm,利用(13)式直接取整固定B1模糊度的成功率較低,因此采用搜索方法(LAMBDA)固定B1模糊度。
2 結果與分析
為了分析基于COMPASS星座的精密相對定位的性能,并與基于GPS及GPS+COMPASS組合星座的精密相對定位的性能進行比較,實驗選用多模多頻GNSS接收機在中國不同地方采集的不同長度的4條基線的實測數據,在不同時段長度以及不同衛星截止高度角條件下進行基線解算,并與基于單GPS星座及GPS/COMPASS組合星座的相應解算結果進行對比,以分析其精度、效率和可靠性。
2.1實驗數據描述
實驗數據采用蘇一光和中海達多星座GNSS多模多頻接收機在中國上海及山西大同采集的不同長度(從17.2至55.8 km)的4條基線的北斗三頻及GPS雙頻靜態觀測數據,表1給出了這些基線觀測數據的總結,基線采樣間隔均為1 s,基線的觀測時段長度均在2 h以上,以提供足夠時間的觀測數據用于靜態解算。利用上述基線的所有GPS觀測數據及相應的IGS精密星歷,采用HGO軟件進行解算,該軟件能夠支持任意組合的GPS、GLONASS、COMPASS多系統解算。將其解算結果作為參考值,用于實驗分析。
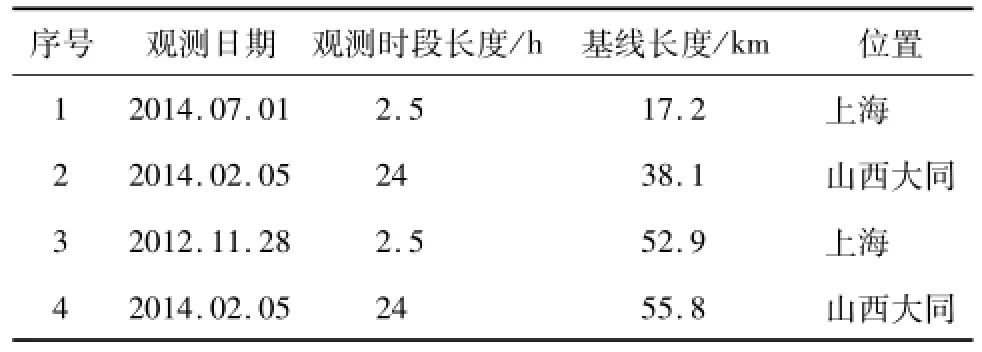
表1 基線信息
2.2基于COMPASS星座的基線解算性能分析
為了評價基于COMPASS星座的基線解算性能,從上述基線的觀測數據中,提取不同時段長度的觀測數據,將每一時段的觀測數據利用單COMPASS星座的觀測數據解算基線,為了與基于GPS以及COMPASS/GPS組合星座的基線解算性能進行比較,也分別利用單GPS星座以及COMPASS/GPS組合星座的觀測數據進行了基線解算,并將處理結果與相應基線的參考值進行了比較。
從這些基線的觀測數據中分別提取90、60、30和10 min不同時段長度的觀測數據,分別采用基于COMPASS星座、GPS星座以及COMPASS+GPS組合星座進行了解算,解算時衛星截止高度角設為15°,采樣間隔設為10 s。三種方案利用不同時段長度解算的基線的北(N)、東(E)和高程(H)方向的分量偏差分別見表2,其中總偏差T=。
由表2可以看出,當觀測時段長度為90和60 min時,基于單COMPASS星座解算的4條中長基線的N/E方向偏差大部分都在±2 cm以內,H方向的偏差大部分都在±3 cm以內,基于單COMPASS、單GPS以及COMPASS/GPS組合系統解算的基線的N/E方向偏差沒有明顯的差別,而基于COMPASS系統解算的基線H方向的偏差略大于基于GPS系統解算的H方向的偏差。隨著觀測時段長度的縮短,基于COMPASS系統解算的4條基線的N/E/H分量偏差及總偏差T都明顯增大,并顯著大于基于GPS系統解算的基線N/E/H偏差及總偏差,如觀測時段長度為10 min時,基于COMPASS的基線分別為N/E/H分量偏差大都超過了10 cm,一些甚至達到了幾十cm;而基于GPS及COMPASS+GPS組合系統的基線(除基線No.3之外)N/E/H分量偏差沒有顯著的變化,大部分仍在±2~±3cm之內。以上實驗表明當觀測時段長度很短的情況下,基于COMPASS星座解算的中長基線精度低于GPS系統,基于COMPASS+GPS組合系統解算的基線精度相比單COMPASS精度有明顯提高。
2.3不同衛星高度截止角情況下的基線解算結果比較
為了進一步分析和比較高衛星截止高度角情況下的COMPASS相對定位性能,將衛星高度角分別設為15、20、25、30、35、40、45和50°,利用60 min時段長度的觀測數據,對表1中的4條基線分別采用COMPASS、GPS及COMPASS+GPS組合三種方案進行了解算,并將處理結果與相應基線的參考值進行了比較,不同衛星截止高度角條件下的三種方案的觀測衛星顆數及解算的N/E/H偏差比較如圖1~4所示。
表2 利用不同時段長度(min)解算的4條基線的N/E/H分量偏差比較/cm
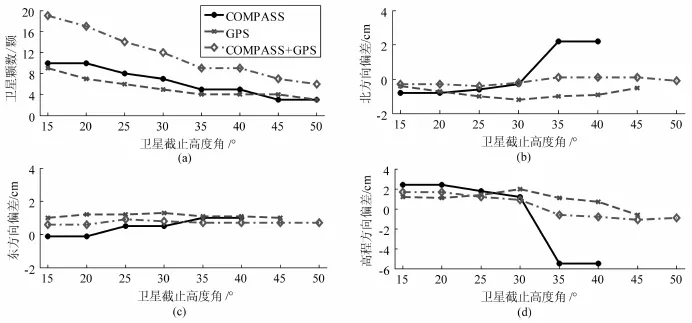
圖1 17.2 km基線不同衛星截止高度角條件下、基于COMPASS、GPS、GPS+COMPASS三種方案的觀測衛星顆數及解算的N/E/H偏差比較圖
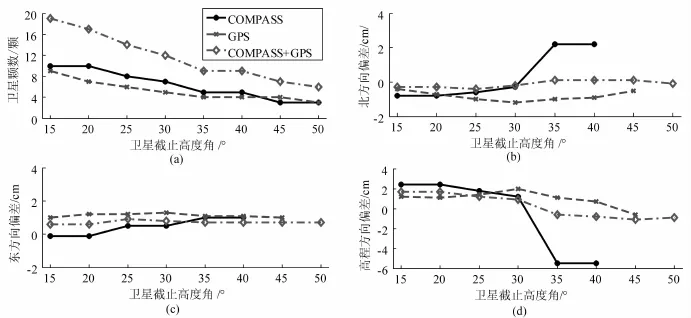
圖2 38.1km基線不同衛星截止高度角條件下、基于COMPASS、GPS、GPS+COMPASS三種方案的觀測衛星顆數及解算的N/E/H偏差比較圖
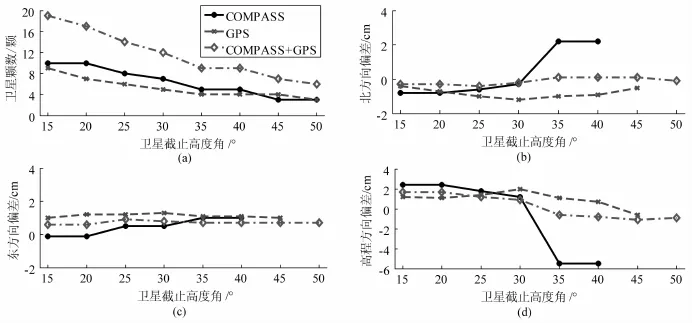
圖3 52.9km基線不同衛星截止高度角條件下、基于COMPASS、GPS、GPS+COMPASS三種方案的觀測衛星顆數及解算的N/E/H偏差比較圖
從圖1~4可以看出,在高度角設為15~50°時,除17.2 km基線之外,其余3條基線在60 min觀測時段內觀測的COMPASS衛星顆數與觀測的GPS衛星顆數相當,大部分時間段觀測的COMPASS衛星顆數還略多于觀測的GPS衛星顆數。當高度角設為15~30°時,應用60 min時段長度三種方案解算的基線N/E/H方向偏差均較小,大部分均在±2 cm以內,三種方案解算的基線結果沒有明顯差別。而當高度角設為35~45°時,單COMPASS星座解算的4條基線的N/E/H偏差明顯增大,尤其是52.9 km基線和55.8 km基線,H偏差均達到了dm級,甚至由于衛星顆數不足而無法解算基線;單GPS星座解算的基線N/E/H偏差隨著衛星截止高度角的增大也略有增大,而組合星座解算的基線各分量偏差沒有明顯變化。當衛星高度角達到50°時,單GPS、單COMPASS都由于衛星顆數不足而無法解算基線,而組合星座解算的基線N/E/H分量偏差大部分仍不超過2 cm。說明在高衛星高度角條件下,單COMPASS星座解算的中長基線的精度不如單GPS星座,COMPASS/GPS組合星座能夠很好地增強觀測衛星的幾何圖形強度,即使衛星高度角達到50°時,COMPASS/GPS組合解算仍能達到2~3 cm的相對定位精度。
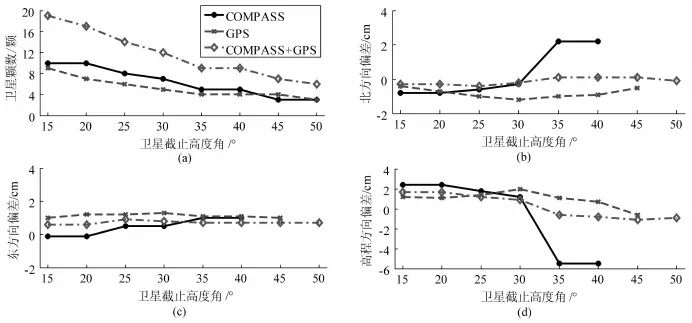
圖4 55.8km基線不同衛星截止高度角條件下、基于COMPASS、GPS、GPS+COMPASS三種方案的觀測衛星顆數及解算的N/E/H偏差比較圖
3 結論
通過以上研究可知:
(1)COMPASS系統已具有在中國境內獨立進行精密相對定位的能力。在基線觀測時段長度達到60 min及以上的情況下,基于單COMPASS星座的中長基線解算結果與單GPS系統解算的結果沒有顯著的差別,N/E/H分量的偏差大部分都小于2 cm,COMPASS/GPS組合星座解算的基線精度并沒有比單一系統有顯著提高。
(2)隨著基線觀測時段長度的縮短,單COMPASS星座解算的基線精度顯著降低,在觀測時段長度小于30 min的情況下,基線N/E/H分量的偏差達到dm級,而基于COMPASS/GPS組合系統解算的基線精度沒有明顯變化,基線N/E/H分量偏差大部分仍在3 cm以內。
(3)在高衛星高度角條件(30°以上)下,基于單COMPASS系統解算的中長基線的精度不如單GPS系統,COMPASS/GPS組合系統比單COMPASS和單GPS系統解算的基線精度有較大改善,即使衛星截止高度角達到50°,中長基線的COMPASS/GPS組合解算仍能達到2~3 cm的相對定位精度。
[1]China Satellite Navigation Office.BeiDou navigation satellite system signal in space Interface Contvol Document[R].Beijing:Bei Dou-SIS-ICD-Fest,2012.
[2]Progress Y.Y.Contribution and challenges of compass/beidou satellite navigation system[J].Acta Geodaetica et Cartographica Sinica,2010,39(1):1-6.
[3] Yuan B.,Bao Z..Algorithmic Research and Realization of GPS/ COMPASS Combined Relative Positioning[C].Guangzhou:China Satellite Navigation Conference(CSNC)Proceedings,2012.
[4] 周巍,郝金明,朱璇,等.COMPASS與GPS兼容定位算法及性能分析[J].測繪科學,2012,37(5):5-8.
[5] 施闖,趙齊樂,李敏,等.北斗衛星導航系統的精密定軌與定位研究[J].中國科學:地球科學,2012,42(6):854-861.
[6] Cao W.,Keefe O.K.,Cannon M..Evaluation of COMPASS ambiguityresolutionperformanceusinggeometric-based techniques with comparison to GPS and Galileo[C].Savannah:Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2008),USA,2008.
[7] Zhang S.,Guo J.,Li B.,Rizos C..An analysis of satellitevisibility and relative positioning precision of COMPASS[C]. Shanghai:Proceedings of Symposium for Chinese Professionals in GPS Technical Forum,2010.
[8] Shi C.,Zhao Q.L.,Hu Z.G,et al..Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites[J].GPS Solutions,2013,17(1):103-119.
[9] 唐衛明,鄧辰龍,高麗峰.北斗單歷元基線解算算法研究及初步結果[J].武漢大學學報(信息科學版),2013,38(8):897-901.
[10]唐旭,何秀鳳.北斗衛星導航系統高精度相對定位性能分析[J].導航定位學報,2013,1(3):28-30,42.
[11]Deng C.L.,Tang W.M.,Liu J.N.,et al..Reliable single-epoch ambiguity resolution for short baselines using combined GPS/ BeiDou system[J].GPS Solutions,2014,18(3):375-386.
[12]Yang Y.X.,Li J.L.,Wang A.B,et al..Preliminary assessment of the navigation and positioning performance of Beiou regional navigation satellite system[J].Science China Earth Sciences,2014,57(1):144-152.
[13]李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2013.
[14]Shi J.B.,Gao Y.A comparison of three PPP integer ambiguity resolution methods[J].GPS Solutions,2014,18(4):519-528.
[15]張小紅,何錫楊.北斗三頻相位觀測值線性組合模型及特性研究[J].中國科學:地球科學,2015,45(5):601-610.
[16]Tang W.M.,Deng C.L.,Shi C.,et al..Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system[J].GPS Solutions,2014,18(3):335-344.
Performance analysis of COMPASS medium-long baseline solution based on real observation data
Guo Qiuying,Zhao Jitao,Zhao Tonglong,et al.
(School of Civil Engineering,Shandong Jianzhu University,Jinan 250101,China)
China's BeiDou satellite navigation system(COMPASS)is developing rapidly,which provides favorable conditions for precise relative positioning based on COMPASS constellation.In order to achieve rapid precise relative positioning for medium-long baselines and improve GNSS application ability in obstacle environment,methods of dual-frequency baseline resolution and ambiguity fix are discussed for COMPASS system,and real multi-constellation GNSS observation data for 4 baselines with distance varying from 17.2km to 55.8km collected are processed based on COMPASS,GPS and COMPASS+GPS combined system.Baseline results based on single system and combined systems are analyzed and compared using different observation periods.Also the baselines are processed and analyzed under different satellite cut-off elevation angles,ranging from 15°to 50° respectively.Calculation results show that:in the case of long observation periods(>60min),the biases in N/E/H component of the baselines are most within±2cm using only COMPASS observation data.There is no obvious difference between the baseline results based on COMPASS and the baseline results based on GPS.While in the case of very short observation period(<30min),the biases in N/E/H component of the baselines reach decimeter level based on COMPASS.And in the case ofhigh cut-off elevation angles(>30°),the performance of baseline resolution using only COMPASS is inferior to that of GPS,especially for medium-long distances.The precision of baseline results is obviously improved based on COMPASS+GPS combined system compared with single system with very short observation period or high cut-off elevation angle.
COMPASS;medium-long baseline solution;short observation period;high cut-off elevation;performance analysis
TU996
A
1673-7644(2016)04-0328-08
2016-05-14
住房和城鄉建設部科學技術項目(2014-k8-070);山東省住房和城鄉建設廳科技項目(KY026);國家自然科學基金項目(41204021)
郭秋英(1970-),女,副教授,博士,主要從事GNSS精密定位數據處理與分析等方面的研究.E-mail:qyguo@sdjzu.edu.cn