基于iBeacon技術的井下人員設備定位系統
2016-11-21 07:17:18張航孫效玉田鳳亮
工礦自動化 2016年11期
張航, 孫效玉, 田鳳亮
(東北大學 資源與土木工程學院, 遼寧 沈陽 110819)
?
基于iBeacon技術的井下人員設備定位系統
張航, 孫效玉, 田鳳亮
(東北大學 資源與土木工程學院, 遼寧 沈陽 110819)
為了更好地解決礦山井下人員設備定位問題,深入分析了iBeacon室內定位技術的定位原理和算法,提出了基于iBeacon技術的井下人員設備定位系統設計方案,詳細介紹了系統的架構、信標布設、移動App開發。應用iBeacon技術進行井下人員設備定位,具有定位精度高、部署方便、導航快捷等優勢。
iBeacon室內定位; 人員定位; 設備定位; 信標; 移動終端
0 引言
目前,國內的煤礦和非煤礦山都建立了安全生產“六大系統”。其中的井下人員設備定位系統一直是業界研究關注的焦點,出色的定位解決方案能極大地保證井下作業人員的安全,同時提升煤礦調度管理水平和礦山運轉效率。
關于井下人員的定位問題,現階段已形成了基于WiFi[1]、ZigBee[1]、WSN和RFID[2-4]等技術的多種解決方案。雖然已經有基于上述技術的成套解決方案出現,但或多或少都存在一些局限性。基于WiFi和ZigBee技術的井下人員設備定位系統需要較為復雜的硬件環境和較高的布設成本,而基于WSN和RFID的井下人員設備定位系統在定位精度和系統可靠性方面較為薄弱。
iBeacon是一項新興的室內定位技術,應用該技術的室內定位系統由布設在空間范圍內的iBeacon信標和便于人員攜帶的移動終端2個部分組成。整套室內定位系統無需額外布設服務器,只需要預先將標志符和位置信息等數據寫入iBeacon信標和移動終端配套的App中即可。
iBeacon技術具有追蹤實時性好、定位精度高、運行功耗小、傳輸距離遠、信標可循環利用等一系列優點。目前,國內尚未有應用該技術進行井下人員設備定位的先例。本文提出了基于iBeacon技術的井下人員設備定位系統設計方案,探討了系統架構、信標布設、移動App開發等問題。
1 iBeacon室內定位系統
1.1 系統組成
iBeacon室內定位系統由iBeacon信標和移動終端2個部分組成,如圖1所示。信標和移動終端之間采用藍牙4.0通信協議。

圖1 iBeacon室內定位系統組成
單個iBeacon信標尺寸小,由獨立的鈕扣電池供電,布設十分方便。移動終端基于iOS 7.0以上或者Android 4.0以上系統,并需要配套的應用軟件以實現用戶交互。
1.2 定位原理
iBeacon室內定位系統的工作原理:人員隨身攜帶的移動終端捕捉來自于布設在相應區域內的iBeacon信標發送的位置信息,并過濾出最強的3個信號。移動終端首先解算這些預先編碼的位置信息,確定出人員的大致位置,再參照RSSI(Received Signal Strength Indicator,接收信號強度指示)測距算法[5-8]和三環定位算法進一步確定出人員的精確位置。從捕捉信號到確定最終位置的詳細流程如圖2所示。

圖2 iBeacon室內定位系統定位流程
每個iBeacon信標中的預存信息[9]由UUID標志符、Major特征值和Minor特征值組成,見表1。
定位過程中,iBeacon信標不斷將自己所包含的UUID及Major和Minor特征值廣播出去。用戶接收端在判斷為對應的UUID后,接收并解析數據。
表1 iBeacon信標信息組成
1.3 定位算法
人員與信標之間的距離依據信標與移動終端之間的RSSI數值變化判定。iBeacon終端通過識別RSSI的變化,將自己與信標之間的距離判別為4種狀態[9],見表2。狀態判斷完成之后,移動終端會利用集成的三環定位算法計算出更精確的位置關系。
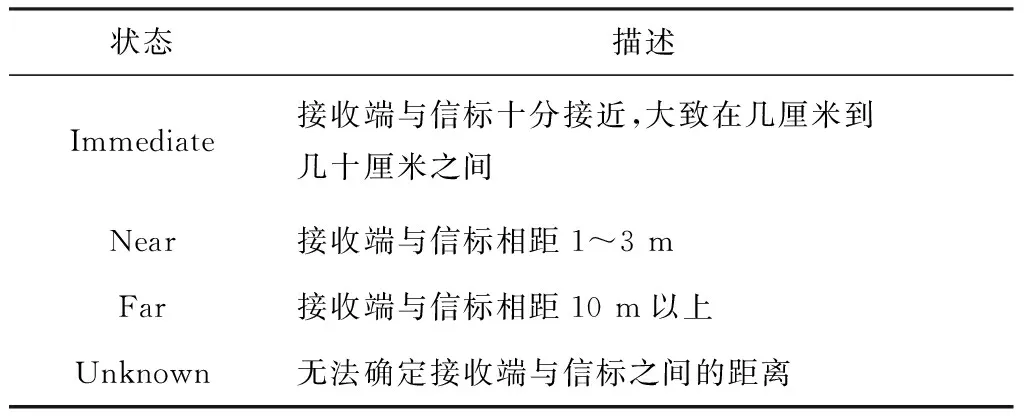
表2 iBeacon定位終端與信標間距判斷
在三環定位算法[10-11]中,iBeacon移動終端會選取當前范圍內平均值最強的3個信號值作為參考。假設3個信標分別為i1(x1,y1),i2(x2,y2),i3(x3,y3),目標終端I的位置為(x0,y0)。目標終端I距離3個固定信標的直線距離Rn(n=1,2,3)可以通過RSSI測距得出。由于存在誤差,I與信標之間的實際距離應該位于(Rn-t,Rn+t)包圍的圓弧中。三環定位算法如圖3所示,目標位置應該處于3個圓弧所重疊的陰影區域,而陰影區域的質心即為I的實際坐標位置。
目標終端I(x0,y0)可由式(1)確定:
(1)
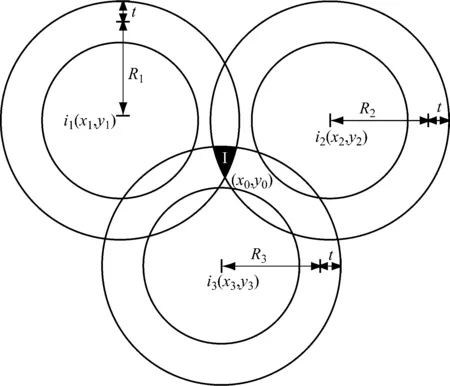
圖3 三環定位算法
2 井下人員設備定位系統
2.1 系統組成
基于iBeacon技術的井下人員設備定位系統主要由固定在巷道壁上的信標和人員隨身攜帶的移動終端2個部分組成。系統架構如圖4所示。
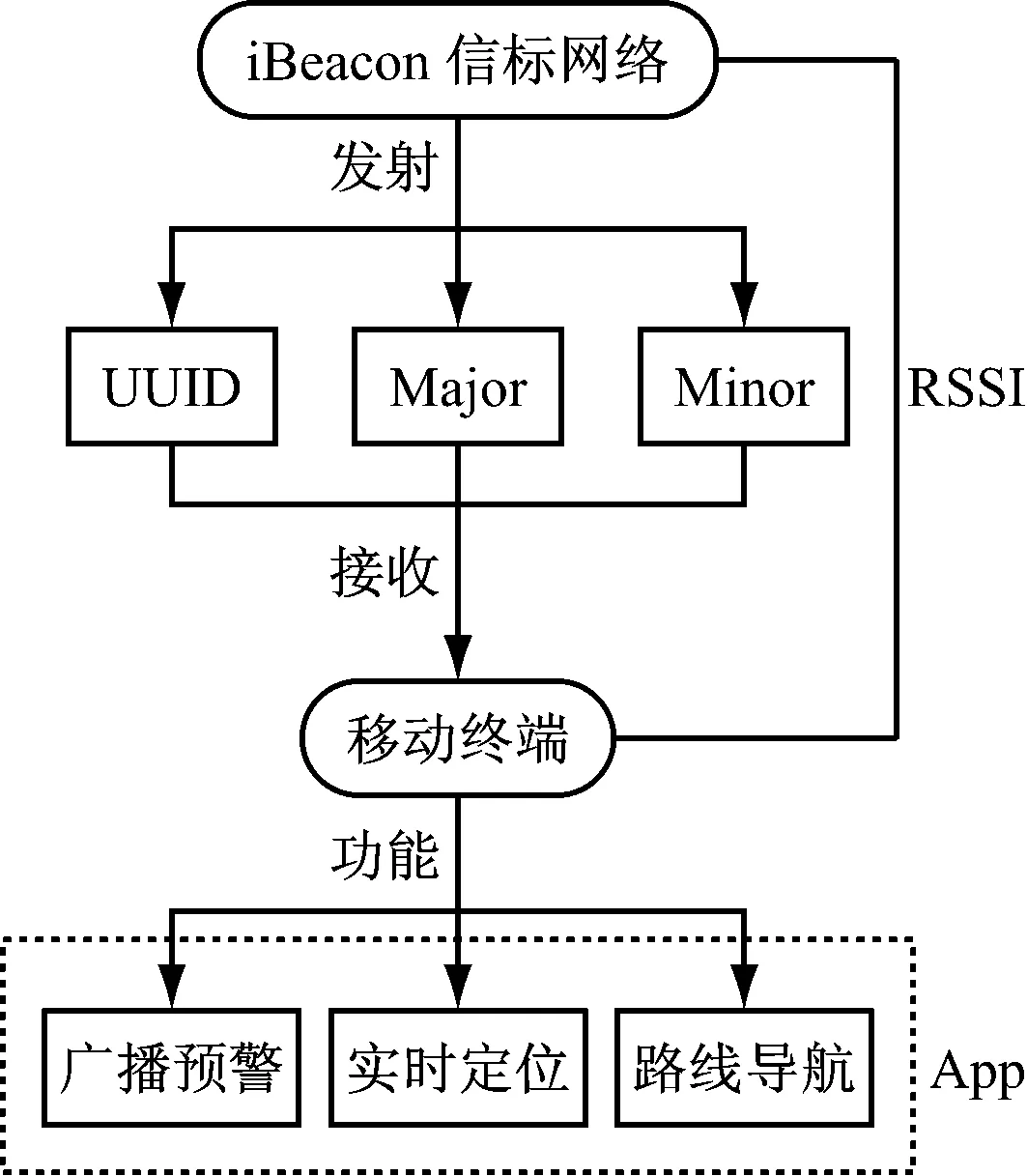
圖4 基于iBeacon技術的井下人員設備定位系統架構
2.2 信標布設
在信標布設前,每一個信標都需要預先寫入編碼好的礦區信息。本設計方案中,同一個井田中的所有iBeacon信標采用相同的UUID標志符。Major特征值用于區分不同的階段水平,Minor特征值用于區分同一階段中的不同巷道。不同階段水平中的每一條巷道都有與之相對應的信標位置信息。信標編碼信息見表3。
信標布設需要根據其單個信標的覆蓋范圍和巷道的特點決定。根據相關實驗證明,信標布設間隔在15 m以內[11-12]能保證較好的精度。
為了保證移動終端在任意位置同時能接收到來自至少3個信標的位置信息,在巷道兩幫間隔10 m左右交替布置信標。復雜地段和水量較大的地段需要適當增加信標密度以保證定位精度。信標布設示意和某礦實際信標布設如圖5和圖6所示。
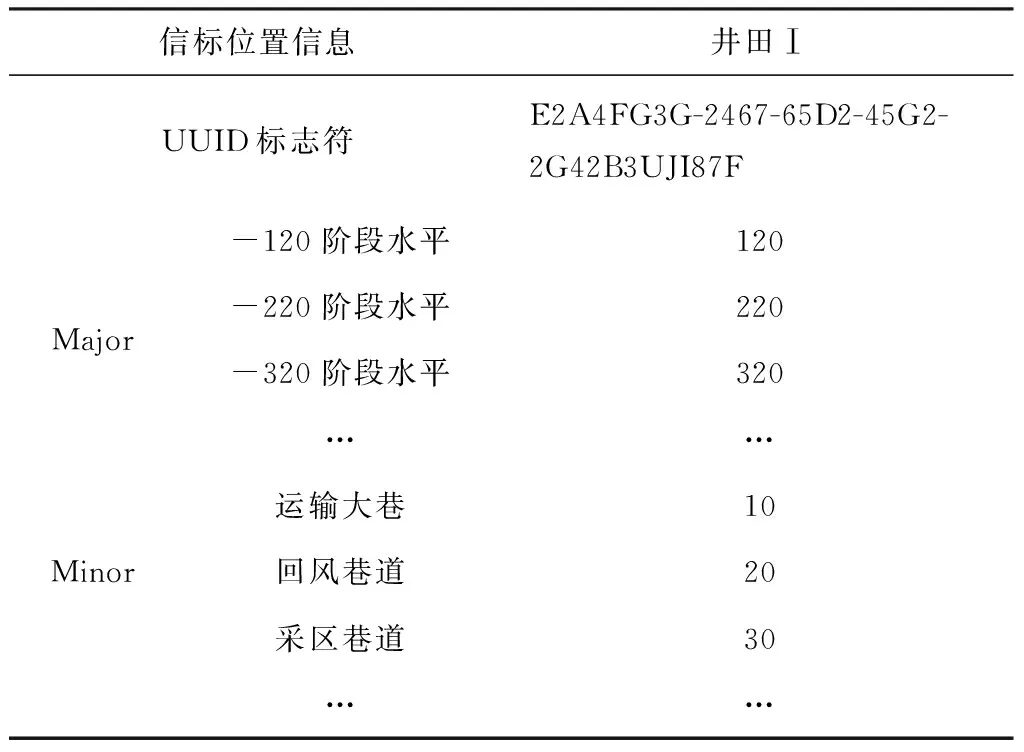
表3 信標編碼信息
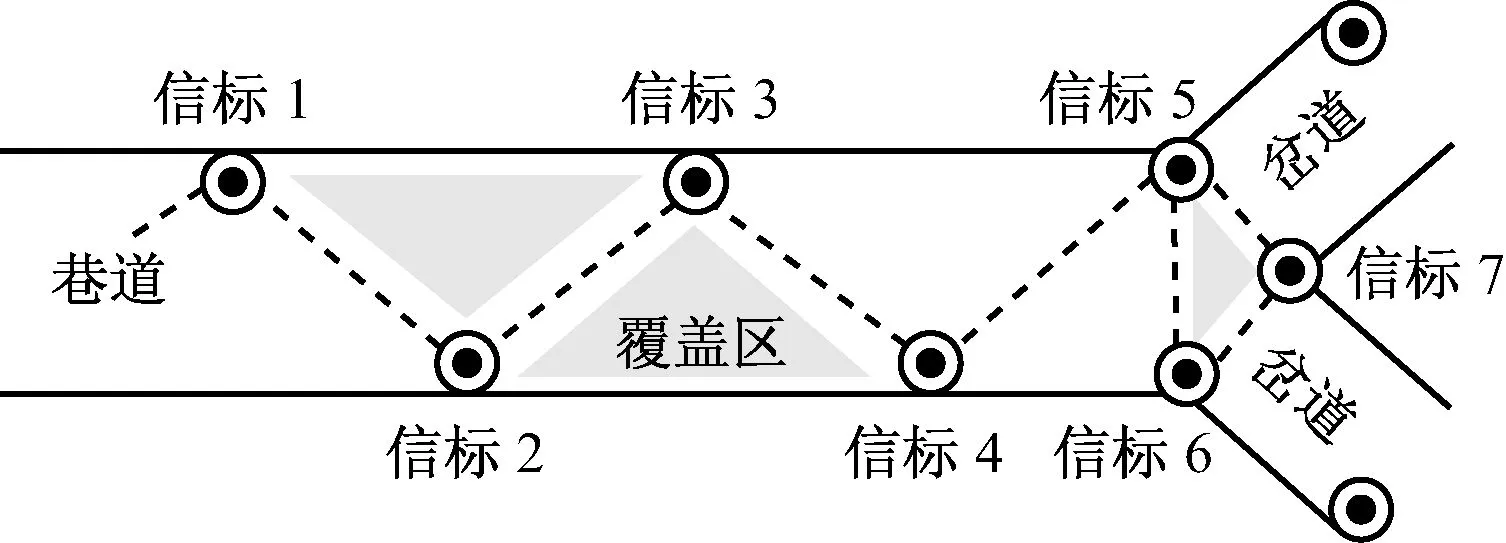
圖5 iBeacon信標布設
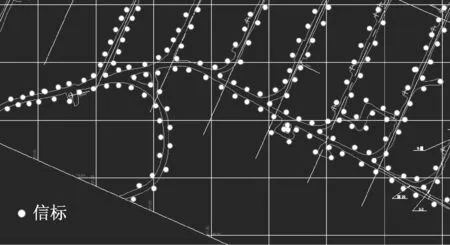
圖6 某礦-320水平信標布設
iBeacon信標具有獨立區域布設特性,實際操作過程中,可以僅對炸藥庫、水泵房、掘進巷道等重點區域進行布設,從而降低系統應用成本。
2.3 移動終端
移動終端采用兼容藍牙4.0功能的iOS或者Android系統硬件設備,需要針對不同的系統開發出相應的App。App的主要功能包括:實時顯示人員地理位置信息,到達特定位置的路徑導航及觸發基于地理位置的廣播預警功能。移動終端操作界面如圖7所示。
(1) 實時追蹤。當人員攜帶移動終端走動時,移動終端會實時解算捕捉到的信標數據,顯示在礦區電子地圖界面。另外,配合移動終端集成的陀螺儀和協處理器可以實時追蹤運動狀態。
(2) 路線導航。系統可以實現類似于地面使用的車載GPS系統的導航功能,可以根據設定的位置采用相關算法計算并顯示出最優路徑,能方便井下人員到達特定區域,方便安全撤離和避免井下迷路。
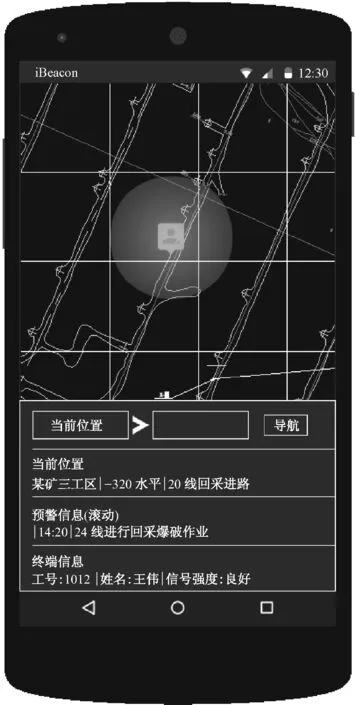
圖7 移動終端操作界面
(3) 廣播預警。iBeacon信標本身不能推送信息,但是能觸發提前集成在App中的通知信息。當人員到達不同區域時,移動終端會推送相應的文字或語音提示。基于地理位置的廣播功能在方便人員作業的同時,還能提供危險預警,避免井下人員進入危險區域。
2.4 精度表示及影響因素
RSSI數值會根據信標和移動終端的距離變化而變化。當信標和移動終端近距離移動時,RSSI數值會成比例減少或增加。而當兩者距離較遠時,RSSI數值會出現不同程度的波動。
iBeacon移動終端會根據信號強度的變化將定位精度圖像化,并實時顯示在終端界面上,供作業人員參考。參考精度共分為3級:優、良好和較差。
要確保基于iBeacon技術的井下人員設備定位系統的精度,就必須保證良好的信號強度。信號強度會隨著信標和移動終端之間的距離變化而變化。另外,基于藍牙4.0的iBeacon信標發射的信號強度也會受到來自固體障礙物、環境濕度和溫度,甚至人體自身的影響。
3 系統優勢分析
基于iBeacon技術的井下人員設備定位系統相對于傳統的人員定位系統有如下優勢:
(1) 施工簡便。藍牙信標體積小,使用鈕扣電池供電,施工簡單,只需要簡易地固定在巷道兩壁或頂板即可。相比于傳統方案,不需要搭建基站和部署專用電纜。
(2) 定位精度高。iBeacon井下定位系統能保證定位精度在1.5~2.5 m以內,較傳統方案3~5 m不等的精度有明顯的提升,更好地滿足了井下人員設備定位需求。
(3) 強大的拓展功能。iBeacon技術有相應的SDK開發套件,通過調用相應的API接口,可實現豐富的拓展功能。
iBeacon井下定位系統在實時追蹤人員位置的同時,還能基于地理位置推送廣播消息,方便井下特殊環境的預警,還可以實現井下導航功能,指引作業人員到達特定區域。
(4) 功耗低,安全性高。iBeacon信標使用的藍牙4.0低功耗技術,通常情況下,一枚鈕扣電池足以保證系統正常工作2~3 a時間,遠優于傳統水平。通信傳輸采用AES-128加密技術,保證信息傳輸安全。
(5) 信標價格低,可循環利用。單枚iBeacon信標的售價在幾元到幾十元不等,成本較低。信標通過特殊處理后還能抵抗惡劣環境。信標的信息可以重復寫入,并且可以隨著礦床的回采逐步回收并用于新礦床的開采中,從而大大降低了成本。
(6) 信號干擾小。 相比于傳統基于WiFi的室內定位技術而言,iBeacon信標傳輸周期占空比小,相互之間的干擾會小很多。經研究測試,置于同一狹小空間內的百余枚信標均能同時正常工作,而傳統技術的通信信道容易相互干擾,導致信號損失大。
4 結語
基于iBeacon技術的井下人員設備定位系統可以實時、精準地向井下作業人員反饋自己的位置信息,通過移動終端還能實現井下導航及預警信息廣播功能,解決了傳統定位系統功能簡單、準確度差、布置不方便等問題,對于提升礦山的安全技術水平和綜合效益有一定幫助。
目前,該套系統可能會受制于移動終端的價格和礦業形勢不景氣的影響,先期只能在部分復雜、高危等重點區域應用。
[1] 蔣磊,于雷,王振翀,等.基于WiFi和ZigBee的井下人員無線跟蹤與定位系統的設計[J].工礦自動化,2011,37(7):5-10.
[2] 李凡甲,徐釗,顏丙磊,等.基于WSN的煤礦井下人員定位系統防碰撞算法的研究[J].工礦自動化,2009,35(1):9-12.
[3] 李靖,樊曉明.基于RFID技術的井下人員定位管理系統的應用[J].工礦自動化,2011,37(5):85-87.
[4] 吳杰.基于WSN與RFID融合技術的井下定位與追蹤算法研究[D].銀川:寧夏大學,2015.
[5] 詹杰,劉宏立,劉述鋼,等. 基于RSSI的動態權重定位算法研究[J].電子學報,2011,39(1):84-90.
[6] 朱劍,趙海,孫佩剛,等.基于RSSI均值的等邊三角形定位算法[J].東北大學學報(自然科學版),2007,28(8):32-35.
[7] 孫波,劉冬陽,徐奉,等.基于RSSI的煤礦井下巷道定位技術誤差分析[J].煤炭學報,2014,39(增刊2):319-324.
[8] 方震,趙湛,郭鵬,等.基于RSSI測距分析[J].傳感技術學報,2007,20(11):2526-2530.
[9] Apple Inc. Getting started with iBeacon[EB/OL]. (2014-06-02)[2016-03-09].https:∥developer.apple.com/ibeacom/Getting-Started-with-iBeacon.pdf.
[10] 莫倩,熊碩.基于藍牙4.0的接近度分類室內定位算法[J].宇航計測技術,2014,34(6):70-74.
[11] 石志京,徐鐵峰,劉太君,等.基于iBeacon基站的室內定位技術研究[J].移動通信,2015,39(7):88-91.
[12] PAUL WHYTOCK.Bluetooth beacon kit lights the way on varying RSSI levels[J]. Microwaves & RF,2014,53(5):38-38.
Underground personnel and equipment location system based on iBeacon technology
ZHANG Hang, SUN Xiaoyu, TIAN Fengliang
(School of Resources and Civil Engineering, Northeastern University, Shenyang 110819, China)
In order to solve the positioning problem of underground personnel and equipment, positioning principles and algorithms of iBeacon indoor positioning technology were deeply analyzed, and a design scheme of underground personnel and equipment location system based on iBeacon technology was put forward. At the same time, the system architecture, beacon layout, mobile App development were introduced. Applying iBeacon technology to underground personnel and equipment positioning has advantages of high positioning precision, easy deployment and quick navigation.
iBeacon indoor positioning; personnel positioning; equipment positioning; beacon; mobile terminal
1671-251X(2016)11-0009-05
10.13272/j.issn.1671-251x.2016.11.003
張航,孫效玉,田鳳亮.基于iBeacon技術的井下人員設備定位系統[J].工礦自動化,2016,42(11):9-13.
2016-04-26;
2016-07-29;責任編輯:張強。
“十二五”國家科技支撐計劃項目(2015BAB15B01);國家自然科學基金項目(71321001/01)。
張航(1992-),男,四川巴中人,碩士研究生,主要研究方向為數字礦山技術,E-mail:huhuhang@gmail.com。
TD655
A
時間:2016-10-28 16:23
http://www.cnki.net/kcms/detail/32.1627.TP.20161028.1623.005.html
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32