一種船舶操縱水動(dòng)力導(dǎo)數(shù)的計(jì)算方法
2016-11-17 01:15:49吳興亞高霄鵬
兵器裝備工程學(xué)報(bào) 2016年10期
吳興亞,高霄鵬
(海軍工程大學(xué) 艦船工程系,武漢 430033)
?
【基礎(chǔ)理論與應(yīng)用研究】
一種船舶操縱水動(dòng)力導(dǎo)數(shù)的計(jì)算方法
吳興亞,高霄鵬
(海軍工程大學(xué) 艦船工程系,武漢 430033)
以船舶操縱性預(yù)報(bào)為研究背景,針對(duì)某一民用打撈船型,基于CFD方法,借助STAR-CCM+平臺(tái),運(yùn)用RANS方程及VOF算法,對(duì)船模進(jìn)行數(shù)值模擬PMM試驗(yàn),考慮航行中自由液面興波和船模姿態(tài)變化,設(shè)計(jì)了船模按純橫蕩運(yùn)動(dòng)及某固定頻率下艏搖運(yùn)動(dòng)的船舶操縱水動(dòng)力導(dǎo)數(shù)求解方法,并以采用回歸方程求得的結(jié)果作為依據(jù)與數(shù)值計(jì)算結(jié)果相印證,表明所求水動(dòng)力導(dǎo)數(shù)的有效性以及求解方法的可行性。
操縱運(yùn)動(dòng)方程; 水動(dòng)力導(dǎo)數(shù);CFD; STAR-CCM+; PMM試驗(yàn)
船舶操縱水動(dòng)力導(dǎo)數(shù)的求取通常包括約束模型試驗(yàn)法、自航模型試驗(yàn)加系統(tǒng)辨識(shí)法、數(shù)據(jù)庫(kù)(回歸公式)估算法及數(shù)值計(jì)算法。其中各種方法利弊共存,約束模型試驗(yàn)精度較好,但花費(fèi)高且周期長(zhǎng),船模與實(shí)船之間存在著尺度效應(yīng)。近年不斷開(kāi)發(fā)應(yīng)用自航模型試驗(yàn)加系統(tǒng)辨識(shí)法,目前已出現(xiàn)利用神經(jīng)網(wǎng)絡(luò)、最小二乘、卡爾曼濾波等系統(tǒng)辨識(shí)法預(yù)報(bào)水動(dòng)力導(dǎo)數(shù)。文獻(xiàn)[1-2]基于RBF網(wǎng)絡(luò)和BP神經(jīng)網(wǎng)絡(luò)對(duì)船舶操縱水動(dòng)力導(dǎo)數(shù)進(jìn)行了計(jì)算分析研究,Abkowitz基于卡爾曼濾波(extended kalman filter,EKF)辨識(shí)方法,對(duì)Esso Osaka 油輪的操縱性進(jìn)行了試驗(yàn)結(jié)果分析,得出了較為理想的系統(tǒng)辨識(shí)結(jié)果。近年,相關(guān)學(xué)者又通過(guò)建立系列數(shù)據(jù)庫(kù)對(duì)船舶設(shè)計(jì)初始階段的水動(dòng)力進(jìn)行估算[3-8],因其對(duì)新船型無(wú)法進(jìn)行相應(yīng)計(jì)算存在相當(dāng)大的局限性;隨著計(jì)算機(jī)科學(xué)技術(shù)的飛速發(fā)展和計(jì)算流體力學(xué)(CFD)技術(shù)對(duì)船舶水動(dòng)力操縱性能的精確預(yù)報(bào),利用商用流體力學(xué)軟件的再次開(kāi)發(fā)計(jì)算水動(dòng)力導(dǎo)數(shù)成為一種有效方法,文獻(xiàn)[9]即借助FLUENT的二次開(kāi)發(fā)對(duì)相關(guān)水動(dòng)力導(dǎo)數(shù)進(jìn)行了數(shù)值仿真計(jì)算。
本文以船舶操縱性預(yù)報(bào)為研究背景,采用CFD這一先進(jìn)工具,通過(guò)在STAR-CCM+軟件平臺(tái)[10]上對(duì)船模進(jìn)行PMM運(yùn)動(dòng)試驗(yàn),求解部分水動(dòng)力導(dǎo)數(shù),并通過(guò)與回歸公式[11]求解得出的相應(yīng)結(jié)果進(jìn)行印證,表明本文基于船舶作純橫蕩運(yùn)動(dòng)求解線加速度導(dǎo)數(shù)以及較優(yōu)簡(jiǎn)諧振蕩頻率下純艏搖運(yùn)動(dòng)求解相應(yīng)水動(dòng)力導(dǎo)數(shù)的計(jì)算方法具有一定可行性和有效性,對(duì)今后船舶操縱性的快速預(yù)報(bào)具有一定的指導(dǎo)意義。
1 數(shù)值計(jì)算方法
1.1 控制方程
在數(shù)值模擬船體周圍流場(chǎng)時(shí),認(rèn)為水為不可壓縮的黏性流體,在流場(chǎng)流動(dòng)時(shí)遵循質(zhì)量守恒及動(dòng)量守恒定律,其張量形式下的連續(xù)性方程和雷諾平均Navier-stokes(Reynolds-Averaged Navier-stokes,RANS)方程如下:
(1)
(2)
式中:ui為流體平均速度分量;μ為流體動(dòng)力黏性系數(shù);P為平均壓力;ρ為流體質(zhì)量密度。
1.2 湍流模型
目前在工程中廣泛使用兩方程式模型,諸如標(biāo)準(zhǔn)k-ε模型、Realizablek-ε模型、標(biāo)準(zhǔn)k-ω模型等。綜合考慮各模型適用條件范圍,在求解分離和復(fù)雜二次流特征流動(dòng)時(shí),通常采用Realizablek-ε湍流模型進(jìn)行RANS方程的封閉。Realizablek-ε模型輸運(yùn)方程如下:
(3)
(4)
式中:Gk、Gb為湍流產(chǎn)生項(xiàng);σk、σε為普朗特?cái)?shù);C1、C1ε為常數(shù);YM為湍流耗散項(xiàng)。
1.3 VOF算法
VOF是一個(gè)簡(jiǎn)單的多項(xiàng)流模型,通過(guò)VOF算法中VOF波設(shè)定,在三維情況下,使船模適用于6自由度的一種運(yùn)動(dòng)模型。VOF算法作為一種處理自由面的有效方法,求解原理是根據(jù)各個(gè)時(shí)刻流體在網(wǎng)格單元中體積的變動(dòng)量與網(wǎng)格單元自身體積的比值函數(shù)F來(lái)構(gòu)造、追蹤自由面,從而確定自由面的形狀和位置。當(dāng)在某時(shí)刻網(wǎng)格單元中比值函數(shù)F=1時(shí),說(shuō)明該時(shí)刻狀態(tài)下網(wǎng)格單元均被指定相的流體充滿,當(dāng)F=0時(shí),說(shuō)明該單元被另一相流體充滿。F函數(shù)滿足方程:
(5)
1.4 STAR-CCM+仿真平臺(tái)及應(yīng)用
STAR-CCM+采用連續(xù)介質(zhì)力學(xué)數(shù)值技術(shù)和最新的IT和CFD技術(shù),通過(guò)穩(wěn)健準(zhǔn)確的數(shù)值算法、覆蓋面寬廣的物理模型以及易處理的網(wǎng)格體系進(jìn)行物理情況的準(zhǔn)確模擬計(jì)算。應(yīng)用STAR-CCM+軟件仿真平臺(tái)計(jì)算船體在不同運(yùn)動(dòng)工況下的水動(dòng)力是文章的中心工作。在該軟件仿真平臺(tái)上,結(jié)合Realizablek-ε湍流模型,利用VOF算法,通過(guò)求解RANS方程,對(duì)船模在不同工況下的運(yùn)動(dòng)進(jìn)行數(shù)值計(jì)算模擬,求得船模所受力以及力矩,并通過(guò)后期的數(shù)據(jù)擬合分析得到待求得船舶各水動(dòng)力導(dǎo)數(shù)。
2 數(shù)值計(jì)算模型
2.1 計(jì)算對(duì)象
計(jì)算船模為一民用打撈船型,縮尺比為1∶18,其三維建模示意圖如圖1。

圖1 計(jì)算船模
2.2 計(jì)算域
計(jì)算域選取如圖2所示,圍繞船體周圍建一個(gè)拖曳水池(Towing Tank),船尾處水線面下0.35m設(shè)為坐標(biāo)原點(diǎn),在船模上方1.2L(L為船長(zhǎng))處設(shè)為上界面,在船模前方、后方各2.4L處分別設(shè)為入流界面和出流界面,在船模左右兩側(cè)以及下方2.4L處設(shè)定壁面。運(yùn)用布爾運(yùn)算(Boolean)。將船體與水池分離,船體表面均設(shè)定為無(wú)滑移壁面。

圖2 船模計(jì)算區(qū)域
2.3 計(jì)算條件設(shè)定
由于船舶實(shí)際操縱運(yùn)動(dòng)本質(zhì)為低頻運(yùn)動(dòng),滿足計(jì)算狀態(tài)。在拖曳水池中,船體自身并不運(yùn)動(dòng),水流以特定流速流向船體,設(shè)定邊界條件時(shí),將入流界面設(shè)為速度入口,出流界面設(shè)為壓力出口,各壁面均設(shè)為無(wú)滑移邊界。計(jì)算模式選用隱式不定常和歐拉多項(xiàng)流,同時(shí)利用VOF方法處理船體運(yùn)動(dòng)產(chǎn)生的興波自由面重構(gòu)等強(qiáng)非線性現(xiàn)象,湍流模式采用K-Epsilon模式。在DFBI中,根據(jù)船模特定的運(yùn)動(dòng)工況選取不同的運(yùn)動(dòng)模式及自由度。
2.4 計(jì)算網(wǎng)格劃分
控制域網(wǎng)格劃分如圖3所示,在劃分計(jì)算域網(wǎng)格時(shí),為保證計(jì)算可行性、節(jié)約計(jì)算時(shí)間,在對(duì)船模周圍較遠(yuǎn)控制域以及水線面以上船模的網(wǎng)格進(jìn)行劃分時(shí),采用稍微稀疏的網(wǎng)格,同時(shí)為保證計(jì)算結(jié)果的準(zhǔn)確度,對(duì)水線面、球皮艏處等一些敏感區(qū)域進(jìn)行網(wǎng)格加密處理,保證計(jì)算中網(wǎng)格品質(zhì)。
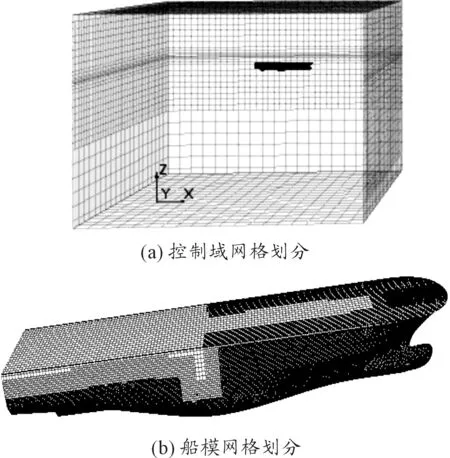
圖3 計(jì)算控制域網(wǎng)絡(luò)劃分
3 數(shù)值計(jì)算結(jié)果
3.1 純橫蕩運(yùn)動(dòng)
3.1.1 運(yùn)動(dòng)工況及求解方法介紹
船舶作純橫蕩運(yùn)動(dòng)如圖4所示,艏向角在運(yùn)動(dòng)過(guò)程中不發(fā)生變化,船模在沿縱向勻速運(yùn)動(dòng)的同時(shí)疊加一個(gè)橫向低頻振蕩。通過(guò)使船作純橫蕩運(yùn)動(dòng),可以確定船舶操縱的位置導(dǎo)數(shù)和線加速度導(dǎo)數(shù),其運(yùn)動(dòng)方程為:
(6)

(7)
(8)

(9)
(10)
其中:ψ為艏向角; r為角速度; a為橫向簡(jiǎn)諧振蕩運(yùn)動(dòng)幅值; ω為簡(jiǎn)諧運(yùn)動(dòng)頻率。
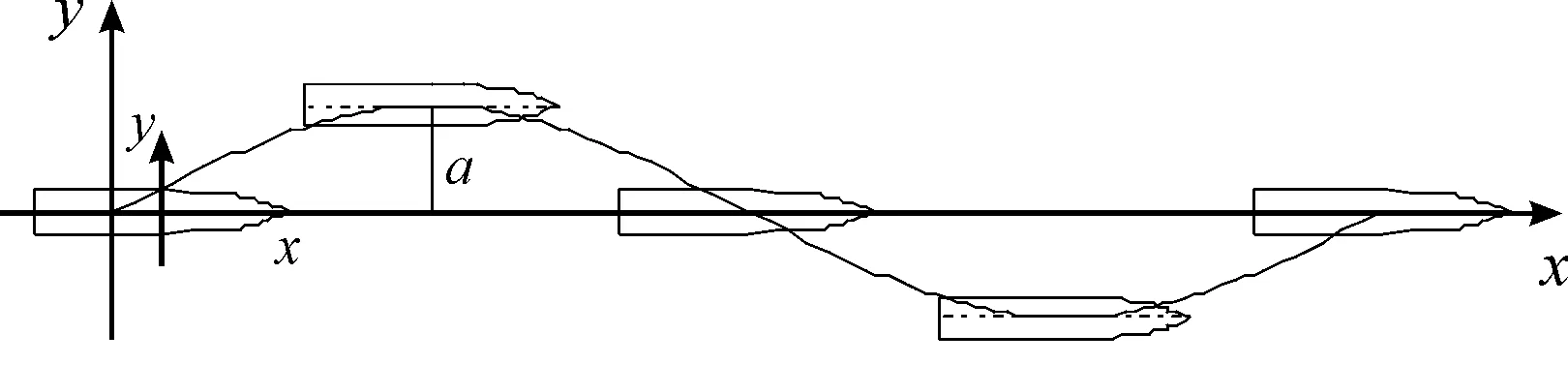
圖4 純橫蕩運(yùn)動(dòng)
計(jì)算船舶純橫蕩運(yùn)動(dòng)時(shí),取固定橫蕩幅值,振蕩頻率依次取為0.06 Hz、0.08 Hz、0.10 Hz、0.12 Hz和0.14 Hz 5種工況,分別依次計(jì)算每種工況下船模受到的水動(dòng)力。船模作純橫蕩運(yùn)動(dòng)時(shí),考慮船模作小振幅振蕩。在線性假設(shè)下,船模在隨船坐標(biāo)系下水動(dòng)力方程可表示為:
(11)
(12)
將式(11)、式(12)中的各參數(shù)項(xiàng)無(wú)因次化,得到無(wú)量綱化水動(dòng)力表達(dá)式為:
Bcosωt+Asinωt
(13)
Ncosωt+Msinωt
(14)
其中:
(15)
(16)
(17)
(18)
通過(guò)上述無(wú)量綱化水動(dòng)力表達(dá)方程(13)、(14),將船舶作橫蕩運(yùn)動(dòng)時(shí)的受力曲線運(yùn)用Matlab進(jìn)行擬合,求得方程(15)~方程(18)中的各系數(shù)項(xiàng)A、B、M、N,再通過(guò)各系數(shù)項(xiàng)的方程表達(dá)式,進(jìn)行二次曲線擬合,求得相應(yīng)線加速度水動(dòng)力導(dǎo)數(shù)。
3.1.2 計(jì)算結(jié)果
選取船模在振幅為0.15 m,振蕩頻率為0.14 Hz工況下時(shí)受力曲線如圖5,兩條曲線均在受力穩(wěn)定周期內(nèi),保證船體受力的穩(wěn)定性,通過(guò)Matlab的曲線擬合功能獲得船模受力曲線方程(19)、曲線方程(20)。船模在5種振蕩頻率下的受力擬合曲線見(jiàn)圖6、圖7,數(shù)值計(jì)算結(jié)果見(jiàn)表2所示。

圖5 受力曲線
擬合曲線方程為:
y=-0.000 838 1sinωt-0.002 552cosωt
(19)
擬合曲線方程為:
y=-0.000 979 7sinωt-0.001 759cosωt
(20)
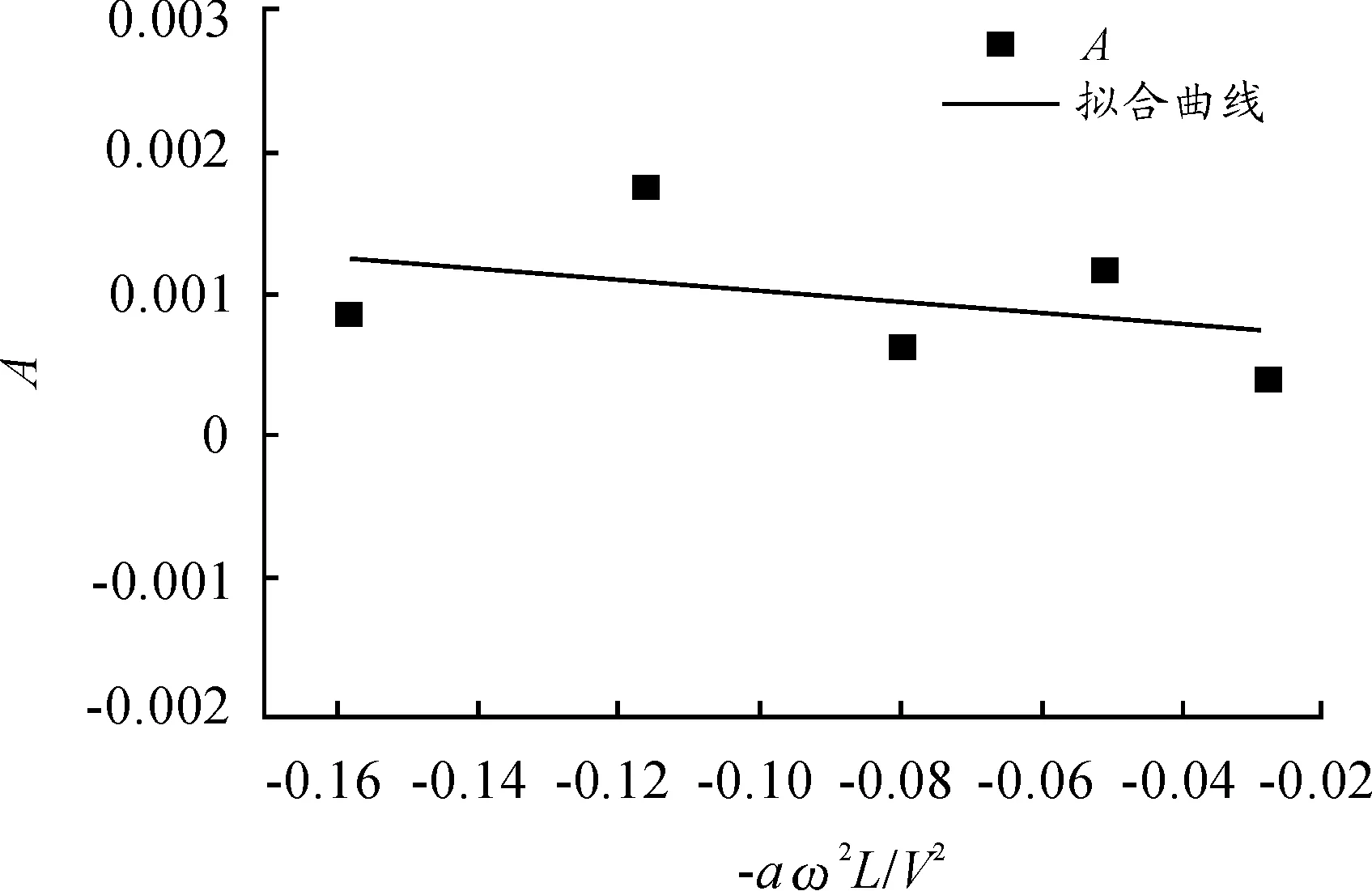
圖6 純橫蕩運(yùn)動(dòng)水動(dòng)力導(dǎo)數(shù)擬合曲線
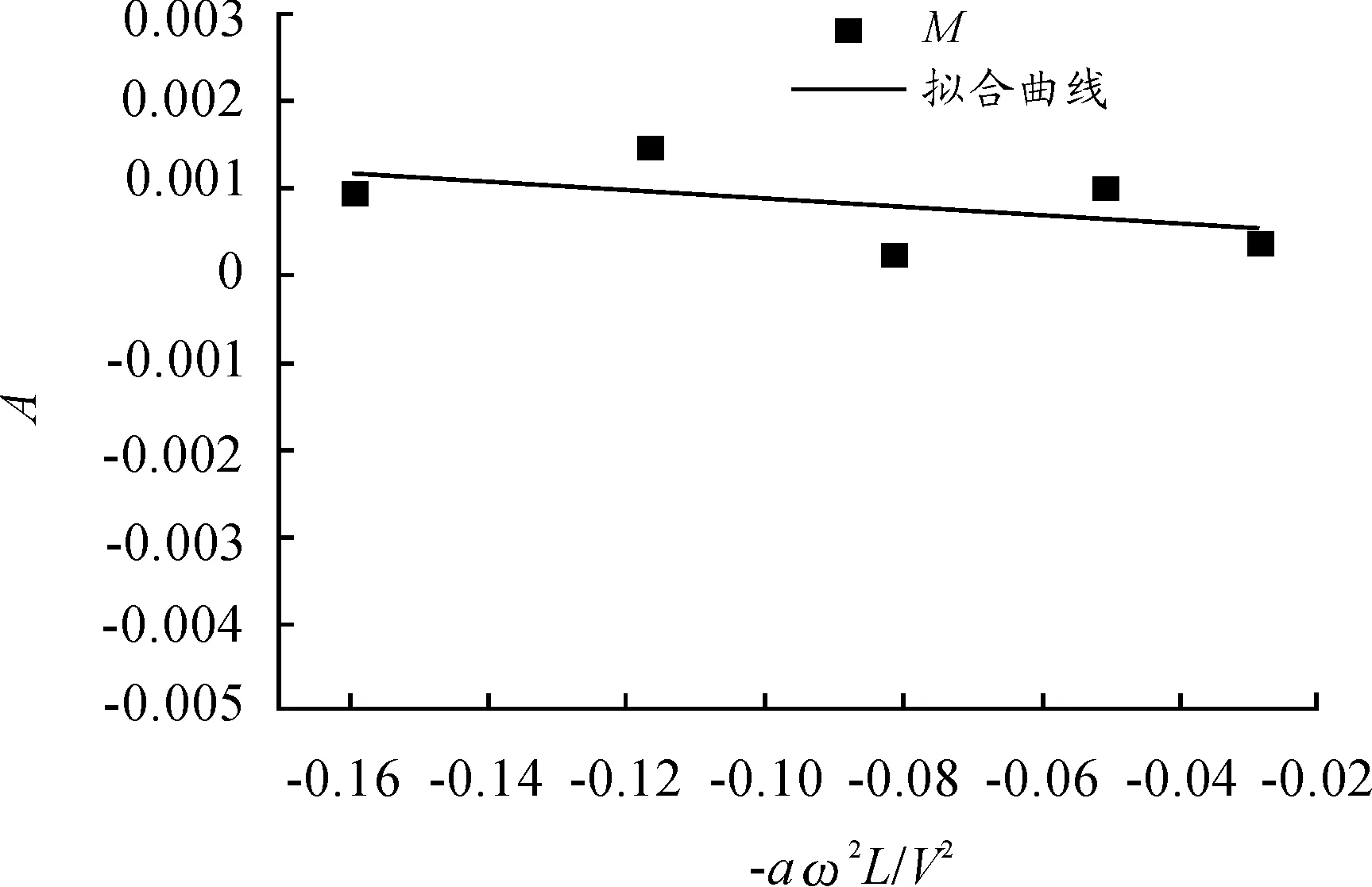
圖7 純橫蕩運(yùn)動(dòng)水動(dòng)力導(dǎo)數(shù)擬合曲線

水動(dòng)力導(dǎo)數(shù)YvNv數(shù)值計(jì)算結(jié)果-0.00392-0.00494
3.2 純艏搖運(yùn)動(dòng)
圖8為船舶作純艏搖運(yùn)動(dòng)示意圖,在運(yùn)動(dòng)坐標(biāo)系下,船舶做純艏搖運(yùn)動(dòng)時(shí),船模在沿縱向方向上勻速運(yùn)動(dòng)的同時(shí)疊加一個(gè)橫向方向上低頻振蕩和艏相角周期性的變動(dòng)。合速度方向與船舶中縱剖面方向一致,其運(yùn)動(dòng)方程可表示為:
(21)
(22)
(23)
(24)
其中:ψ為艏向角;ψ0為艏向角幅值;r為角速度;a為橫向簡(jiǎn)諧運(yùn)動(dòng)幅值;ω為簡(jiǎn)諧運(yùn)動(dòng)頻率。
經(jīng)前期數(shù)值仿真計(jì)算并分析結(jié)果得知,船舶作艏搖運(yùn)動(dòng)頻率取0.05 Hz與0.07 Hz時(shí),其數(shù)值仿真結(jié)果較接近估算值。故此次艏搖運(yùn)動(dòng)仿真實(shí)驗(yàn)中頻率取為0.06 Hz,振幅依次取0.1、0.3、0.5、0.7和0.8 m,分別計(jì)算每種振幅下船舶受的水動(dòng)力。水動(dòng)力方程為:
(25)
(26)
將式(25)、式(26)無(wú)因次化,與船舶作純橫蕩運(yùn)動(dòng)處理方法類似,利用Matlab對(duì)船舶受力曲線進(jìn)行擬合求得船模純艏搖運(yùn)動(dòng)時(shí)相應(yīng)水動(dòng)力導(dǎo)數(shù)。計(jì)算結(jié)果見(jiàn)表3所示。
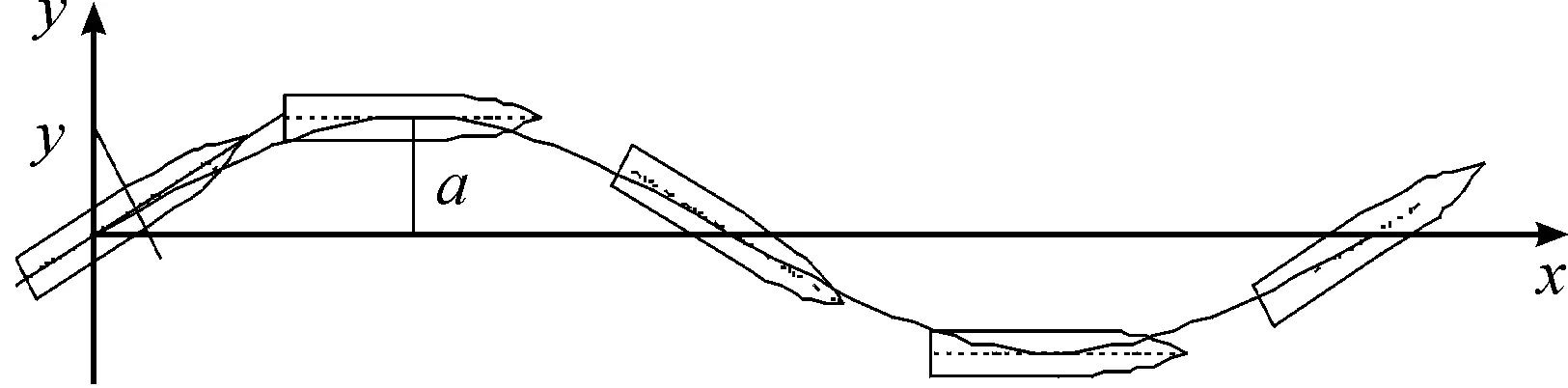
圖8 純艏搖運(yùn)動(dòng)

水動(dòng)力導(dǎo)數(shù)數(shù)值計(jì)算值回歸公式估算值Yr'0.003150.003154Nr'-0.00280-0.00221
4 結(jié)論
1) 數(shù)值計(jì)算與采用回歸公式計(jì)算結(jié)果印證,表明基于STAR-CCM+平臺(tái)進(jìn)行PMM試驗(yàn)求取線性水動(dòng)力導(dǎo)數(shù)的準(zhǔn)確性與可行性。
2) 基于PMM實(shí)驗(yàn)使船舶作純橫蕩運(yùn)動(dòng)求得加速度水動(dòng)力導(dǎo)數(shù)是一種較快速準(zhǔn)確估算水動(dòng)力的方法,具有一定的工程實(shí)用價(jià)值,為下一步船舶操縱性仿真預(yù)報(bào)的開(kāi)展奠定了基礎(chǔ)。
[1] 張曉兔,張樂(lè)文,劉祖源.基于RBF網(wǎng)絡(luò)的操縱水動(dòng)力預(yù)報(bào)[J].武漢理工大學(xué)學(xué)報(bào):交通科學(xué)與工程版,1999(6):602-604.
[2] 唐曉光,劉祖源.基于神經(jīng)網(wǎng)絡(luò)的船舶操縱運(yùn)動(dòng)水動(dòng)力預(yù)報(bào)[J].武漢理工大學(xué)學(xué)報(bào):交通科學(xué)與工程版,2002,26(1):25-27.
[3] PETERSEN J B,LAURIDSEN B.Prediction of Hydrodynamic Forces From a Database of Maneuvering Derivatives[C]//MAARSIM 2000,International Conference on Marine Simulation and Ship Maneuvering.Orlando,USA,2000.[4] LEE T I,AHN K S.On an Empirical Prediction of Hydrodynamic Coefficients for Modern Ship Hulls[C]//MARSIM’03,International Conference on Marine Simulation and Ship Maneuverability.Kanazawa,Japan,2003.
[5] KIJIMA K,NAKIRI Y.On the Practical Prediction Method for Ship Maneuvering Characteristics[C]//MARSIM`03,International Conference on Marine Simulation and Ship Maneuverability.Kanazawa,Japan,2003.
[6] YOSHIMURA Y,MA N.Maneuvering Prediction of Fishing Vessls[C]//International Conference on Marine Simulation and Ship Maneuverability.Kanazawa,Japan,2003.
[7] KIJIMA K,NAKIRI Y.On the Practical Prediction Method for Ship Maneuverability in Restricted Water[C].Transation of the Wear-Japan Society of Naval Architects,2003(107).
[8] 李冬荔.粘性流場(chǎng)中船舶操縱線性水動(dòng)力導(dǎo)數(shù)計(jì)算[C]//黑龍江省造船工程學(xué)會(huì)學(xué)術(shù)年會(huì)論文集.出版地不詳:[出版社不詳],2008.
[9] 李冬荔,王彪,楊亮.船舶操縱線性水動(dòng)力導(dǎo)數(shù)計(jì)算方法研究[J].中北大學(xué)學(xué)報(bào)(自然科學(xué)版),2008,29(06):531-537.
[10]李曉文,林壯,郭志群,等.基于Star-CCM+的滑行艇水動(dòng)力性能模擬計(jì)算[J].中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2013(S2):133-137.
[11]范尚雍.船舶操縱性[M].北京:國(guó)防工業(yè)出版社,1988.
(責(zé)任編輯 楊繼森)
Calculation Method of Hydrodynamic Derivatives Related to Ship Maneuvering
WU Xing-ya, GAO Xiao-peng
(Department of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Taking the ship maneuverability prediction as the research background, hydrodynamic derivatives related ship maneuvering were analyzed by CFD method for a certain civilian salvage ship, with STAR-CCM+ software platform, using RANS equations and VOF algorithm, and numerical simulation was carried out on the model PMM test, considering the free liquid surface and the attitude of the model change in the process of oblique towing, and the maneuverability hydrodynamic derivative solving methods were designed according to the swaying motions and yawing motions of stationary oscillation modes, and the results of numerical calculation was compared with the results by regression equation, which confirms the effectiveness of the result to solve the hydrodynamic derivatives and the feasibility of solving method.
maneuvering equation; hydrodynamic derivatives; CFD; STAR-CCM+; PMM test
2016-05-24;
2016-06-20
吳興亞(1992—),男,碩士,主要從事艦船流體動(dòng)力性能研究。
10.11809/scbgxb2016.10.038
吳興亞,高霄鵬.一種船舶操縱水動(dòng)力導(dǎo)數(shù)的計(jì)算方法[J].兵器裝備工程學(xué)報(bào),2016(10):181-184.
format:WU Xing-ya, GAO Xiao-peng.Calculation Method of Hydrodynamic Derivatives Related to Ship Maneuvering[J].Journal of Ordnance Equipment Engineering,2016(10):181-184.
U661.3
A
2096-2304(2016)10-0181-05
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03