某航天器壓緊釋放裝置結(jié)構(gòu)設(shè)計與分析
2016-11-17 01:15:46張秀華
兵器裝備工程學(xué)報 2016年10期
張秀華,楊 臻,邱 楓
(中北大學(xué) 機(jī)電工程學(xué)院,太原 030051)
?
【機(jī)械制造與檢測技術(shù)】
某航天器壓緊釋放裝置結(jié)構(gòu)設(shè)計與分析
張秀華,楊 臻,邱 楓
(中北大學(xué) 機(jī)電工程學(xué)院,太原 030051)
為了給某微小型航天器設(shè)計一種新型的非火工壓緊釋放裝置,采用了彈簧連桿式分離機(jī)構(gòu),對其可行性進(jìn)行了分析。介紹了該壓緊釋放裝置的工作原理,通過理論計算求出該裝置燃斷器的燃斷時間,進(jìn)行試驗(yàn)驗(yàn)證,基于ANSYS Workbench軟件進(jìn)行了壓緊狀態(tài)下的隨機(jī)振動仿真分析。結(jié)果表明,該燃斷器的燃斷時間可靠,理論值與試驗(yàn)值誤差在15%以內(nèi),如果添加10 N預(yù)拉力,燃斷時間可減少約10%。在壓緊狀態(tài)下該裝置振動環(huán)境適應(yīng)性好,并且能夠及時釋放轉(zhuǎn)子。該壓緊釋放裝置可滿足微小型航天器精密機(jī)構(gòu)的要求。
航天器;壓緊釋放裝置;凱夫拉線燃斷器;隨機(jī)振動
航天器壓緊釋放裝置既能保證在發(fā)射時本體和附件之間或部件與部件之間的牢固連接,又能實(shí)現(xiàn)入軌后按規(guī)定要求解除約束。最初的釋放技術(shù)主要使用爆炸螺栓火工裝置實(shí)現(xiàn)連接和分離。雖然火工裝置具有單位質(zhì)量轉(zhuǎn)換能量高、體積小、作用時間短等特點(diǎn),但同時火工裝置也存在一些缺點(diǎn)。例如,由于一次性使用,飛行前無法進(jìn)行功能檢查;工作時沖擊載荷大;雖然后期形狀記憶合金解鎖機(jī)構(gòu)實(shí)現(xiàn)了太陽帆板解鎖的無沖擊和無污染,但由于記憶合金設(shè)定耗時長、最大變形率低和承載能力差,所以并沒有廣泛采用[1-5]。
為了滿足微小型航天器的分離釋放裝置不僅需要結(jié)構(gòu)緊湊又要保證快速釋放,設(shè)計了一種彈簧連桿式分離機(jī)構(gòu)。這種連桿型機(jī)構(gòu)在固定過程中采用高強(qiáng)度的凱夫拉線,并在釋放過程中采用電阻絲型燃斷器燃斷凱夫拉線。電阻絲型燃斷器具有結(jié)構(gòu)簡單、燃斷效率高等特點(diǎn)[6-9]。本文首先介紹了該壓緊釋放裝置的工作原理,并對燃斷器的燃斷時間進(jìn)行了理論分析,隨后進(jìn)行了試驗(yàn)驗(yàn)證,最后在ANSYS Workbench中進(jìn)行了壓緊狀態(tài)下的隨機(jī)振動分析,得出了該壓緊裝置能夠及時釋放轉(zhuǎn)子,可滿足空間環(huán)境隨機(jī)振動要求。
1 壓緊釋放裝置工作原理
壓緊機(jī)構(gòu)保證整個精密機(jī)構(gòu)在航天器發(fā)射全過程中機(jī)構(gòu)的可靠性,該機(jī)構(gòu)脫離后,釋放精密機(jī)構(gòu)內(nèi)部的轉(zhuǎn)子,使其正常工作。結(jié)合精密機(jī)構(gòu)壓緊與釋放裝置的要求,設(shè)計了以下壓緊與釋放裝置,該機(jī)構(gòu)結(jié)構(gòu)原理如圖1所示。

1.燃線器; 2.壓緊線; 3.壓緊桿; 4.壓緊端蓋; 5.釋放彈簧;6.壓緊頭導(dǎo)向蓋; 7.壓緊桿回轉(zhuǎn)軸; 8.壓緊頭; 9.張線器
壓緊釋放機(jī)構(gòu)原理如下:壓緊線2纏繞在壓緊桿3上,壓緊桿通過端面壓住壓緊頭8,對整個緊密機(jī)構(gòu)中的定子進(jìn)行壓緊;釋放時,燃線器1燃斷壓緊線,使得壓緊桿松開,釋放彈簧5推動壓緊桿繞其回轉(zhuǎn)軸旋轉(zhuǎn),帶動壓緊頭8往外運(yùn)動,從而實(shí)現(xiàn)緊密機(jī)構(gòu)的釋放。張線器9通過兩端的兩個M3蝶形螺母對纏繞線拉力進(jìn)行調(diào)整。
2 燃斷器結(jié)構(gòu)和燃斷時間計算
2.1 燃斷器總體性能指標(biāo)
結(jié)合微小航天器釋放要求[10]和布置空間特點(diǎn),對燃斷器性能要求如下:
1) 燃斷時間不大于4 s;
2) 燃斷器尺寸小于20 mm×10 mm×10 mm;
3) 工作電壓不大于4.2 V。
2.2 燃斷器結(jié)構(gòu)
根據(jù)所受工作載荷[11-12],對凱夫拉線取1.5倍安全系數(shù)后,選用7號3股凱夫拉線。燃斷器電阻絲選用Cr20Ni80型鎳鉻合金電阻絲。根據(jù)燃斷器空間布置特點(diǎn),對電阻絲取長度為40 mm。該燃斷器組成如圖2所示。其中1為凱夫拉線,2為連接頭,3為電阻絲,4為陶瓷支座,5為安裝底座。
圖2 凱夫拉線燃斷器簡圖
2.3 燃斷時間計算
根據(jù)熱力學(xué)第一定律可得:
轉(zhuǎn)化可得出
熱通量q可以表達(dá)為
其中:η為耗散功率;S為交換表面
S=2πrLspiral
假設(shè)初始溫度等于環(huán)境溫度,即Ti=T0,可得:
反過來,可以獲得達(dá)到溫度T所需要的時間
其中:直徑0.28 mm凱夫拉線物理參數(shù):導(dǎo)線對流交換系數(shù)h為0.048 W/mK;比熱c為1 700 J/(kg·K);熔化溫度T為453.15 K;室溫T0為298.15 K[13]。由于沒有考慮熱輻射影響,加熱器的耗散功率一般認(rèn)為等于90%[14]。
燃斷器電阻絲電阻為1.3 Ω,參考相關(guān)文獻(xiàn)[15],取得Lspiral=1.5 mm。經(jīng)以上計算可得燃斷時間如表1所示。

表1 理論計算值
3 燃斷器的燃斷時間試驗(yàn)
3.1 試驗(yàn)?zāi)P徒?/p>
電阻絲型凱夫拉線燃斷器在標(biāo)準(zhǔn)大氣條件下試驗(yàn),燃斷器試驗(yàn)?zāi)P腿鐖D3所示。

圖3 燃斷器實(shí)物及試驗(yàn)裝置
3.2 燃斷器試驗(yàn)
對0.28 mm的凱夫拉線燃斷時間進(jìn)行試驗(yàn),每組試驗(yàn)取5組數(shù)據(jù),去掉最高值和最低值,對剩下3組數(shù)據(jù)取平均值。無預(yù)拉力下燃斷時間理論值與實(shí)驗(yàn)值對比匯總?cè)绫?所示,不同預(yù)拉力下的燃斷時間如表3所示。

表2 無預(yù)拉力下燃斷誤差匯總表
表3 不同預(yù)拉力下的燃斷時間
3.3 結(jié)果分析
燃斷時間理論值與試驗(yàn)值進(jìn)行比較如圖4所示。
圖4 燃斷時間理論值與試驗(yàn)值比較
1) 在電源電壓2.5 V,燃線器功率為2.5 W以下時,燃斷器能將直徑為0.28 mm的凱夫拉線燃斷。在3.0~4.2 V,燃斷器能夠?qū)⒅睆綖?.28 mm的凱夫拉線燃斷,燃斷時間在2.1~4.53 s。
2) 在凱夫拉線無預(yù)拉力情況下,理論值和試驗(yàn)值的誤差在15%以內(nèi)。凱夫拉線預(yù)拉力增加10 N,燃斷時間約為無預(yù)拉力時的90%,凱夫拉線預(yù)拉力增加20 N,燃斷時間約為無預(yù)拉力時的80%。
4 壓緊狀態(tài)下隨機(jī)振動分析
航天器在發(fā)射過程中需要滿足振動試驗(yàn)要求,確保壓緊裝置的可靠性。為滿足航天器質(zhì)量屬性要求,采用硬質(zhì)鋁合金7A04,利用ANSYS Workbench隨機(jī)振動模塊對該精密機(jī)構(gòu)進(jìn)行了隨機(jī)振動分析。

表4 隨機(jī)振動載荷條件
按照表4所述要求,并根據(jù)以下公式計算得出隨機(jī)振動加速度功率譜密度曲線(圖5):

圖5 隨機(jī)振動目標(biāo)譜曲線
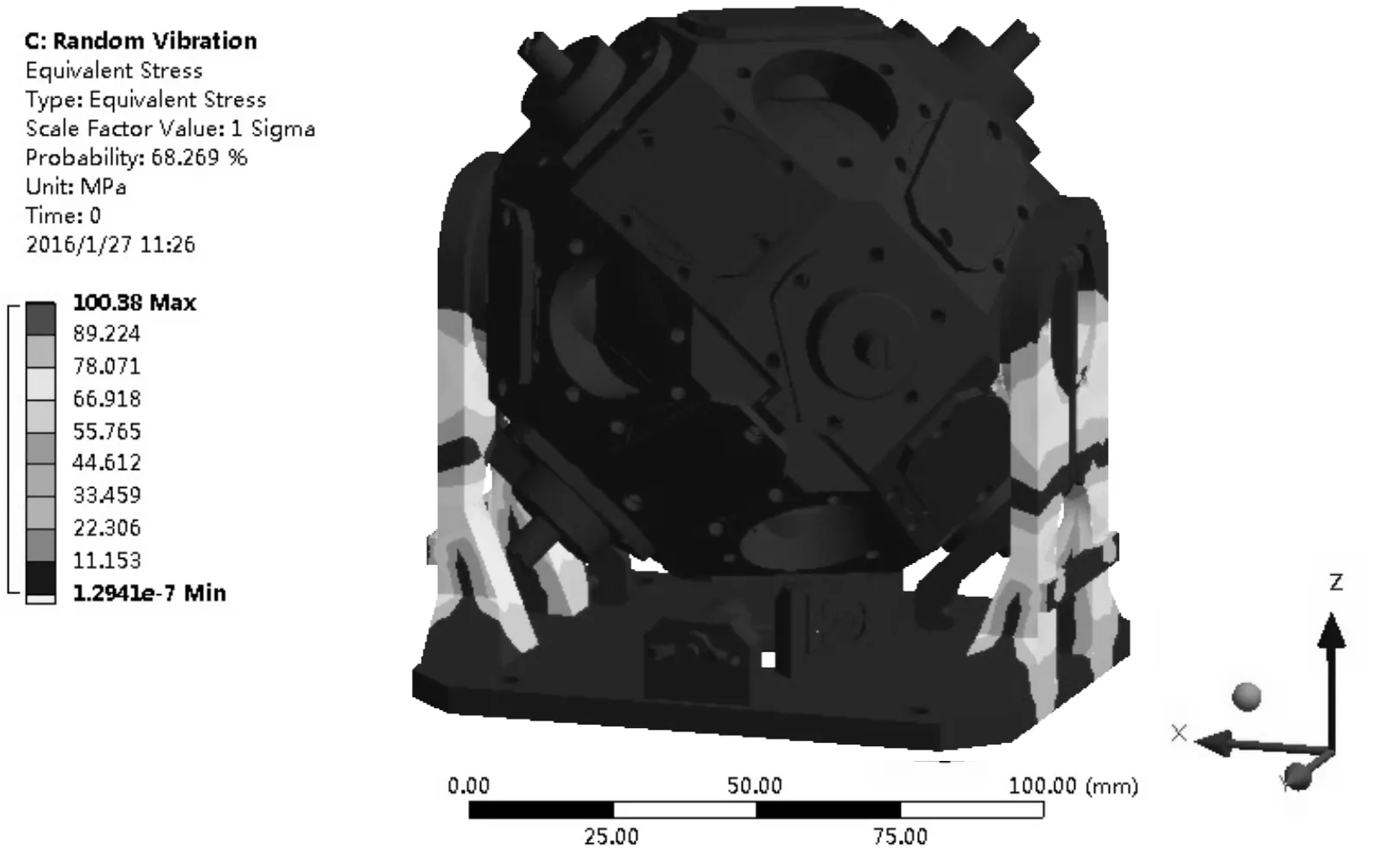
圖6 X方向隨機(jī)振動應(yīng)力云圖
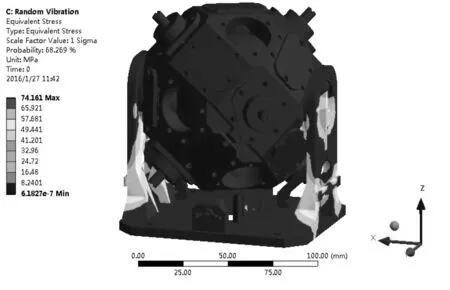
圖7 Y方向隨機(jī)振動應(yīng)力云圖
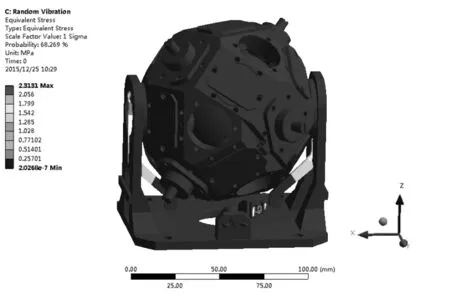
圖8 Z方向隨機(jī)振動應(yīng)力云圖
由仿真結(jié)果可知:X方向機(jī)構(gòu)最大應(yīng)力為100.38 MPa(圖6),Y方向機(jī)構(gòu)最大應(yīng)力為74.16 MPa(圖7),Z方向機(jī)構(gòu)最大應(yīng)力為2.30 MPa(圖8),且最大應(yīng)力在右支架支腿處,隨機(jī)振動產(chǎn)生的最大應(yīng)力小于材料許用應(yīng)力490 MPa。綜上所述,該機(jī)構(gòu)能夠滿足隨機(jī)振動要求。
5 結(jié)論
通過對該壓緊釋放機(jī)構(gòu)隨機(jī)振動有限元分析可以看出,該機(jī)構(gòu)壓緊狀態(tài)下具有良好的振動環(huán)境適應(yīng)性,在發(fā)射過程中能夠可靠壓緊轉(zhuǎn)子。理論計算出的燃斷時間可用于燃斷器前期無預(yù)拉力下的燃斷時間估算。在直流電壓3.5~4.2 V范圍內(nèi),燃斷器燃斷時間滿足小于4s要求,適當(dāng)增加該機(jī)構(gòu)的燃線器預(yù)拉力可快速釋放轉(zhuǎn)子,滿足微小型航天器的分離和釋放裝置快速釋放和結(jié)構(gòu)可靠的要求。該彈簧拉桿式分離機(jī)構(gòu)具有無沖擊、無污染、安全性好、地面測試時可重復(fù)使用等優(yōu)點(diǎn),在航天器分離技術(shù)領(lǐng)域具有良好的應(yīng)用價值和推廣前景。
[1] FANCHINI G,GAGLIOSTRO D.The e-st@rCubeSat:Antennas System[J].Acta Astronautica,2011,69:1089-1095.
[2] MURARI A,BARZON A.Ultra high vacuum properties of some engineering polymers[C]//ConsorzioRFX-Associazione,ENEA Euratom Per LaFusione.Padova,Italy,2004.
[3] BRETT HUETTL,CLIFF E.WILLEY.Design and Development of Miniature Mechanisms for Small Spacecraft[C]//14th AIAA/USU Conference on Small Satellites.SSC00-VI-2.
[4] LU D,WONG C P.Material For Advanced Packaging[M].New York:Springer,2009:273-306.
[5] ISEL H,KURT Y,YILMAZ O.et al.435 MHz monopole antenna design for Turksat-3USAT nano satellite,Signal Processing and Communications Applications (SIU)[C]//2011 IEEE 19th Conference on.2011:884-887.
[6] MAZZAROTTA,BARBARA.Risk reduction when transporting dangerous goods[J].Risk Decision and Policy,2002(1):41-44.
[7] VIKAS S,SHAWN A C,LALLIT A.Thermally Actuated Shape-memory Polymers:Experiments,Theory and Numerical Simulations[J].Journal of the Mechanics and Physics of Solids,2010,58(8):1100-1124.
[8] 原永亮,楊臻,王圣輝,等,輪系在翻轉(zhuǎn)機(jī)構(gòu)中的應(yīng)用分析[J].包裝工程,2014,17(9):86-90.
[9] 邱楓,楊臻,原永亮,一種新型電磁式鎖緊機(jī)構(gòu)設(shè)計與仿真分析[J].包裝工程,2015,36(17):80-83.[10]SHI Bing,JIN Ye.A Framework of Virtual Prototyping Environment for the Design and Analysis of Mechanical Mecha-nism with Clearance[J].Virtual and Physical Prototyping,2007,2(1):21-28.
[11]盧利平,唐龍,岳恩,等.鎳電阻絲的制備及電阻溫度特性[J].四川兵工學(xué)報,2013(12):113-115.
[12]張浙,劉登瀛.非傅里葉熱傳導(dǎo)研究進(jìn)展[J].力學(xué)進(jìn)展,2000(03):446-456.
[13]CubeSat Design Specification Rev.12[Z].California State Polytechnic University,2010.
[14]Jakob Fromm Pedersen,Vega CubeSats ICDiss0rev4,ESA,EuropeanSpace Researchand Technology Centre-Keplerlaan1[Z].Noordwijk,The Netherlands,2009.
[15]PILATO L A,MICHNO M J.Advanced Composite Materials[Z].Springer,1994.
[16]張歡,劉海平,劉天雄.航天器火工沖擊載荷減緩設(shè)計及驗(yàn)證[J].裝備環(huán)境工程,2015(3):34-41.
(責(zé)任編輯 唐定國)
Structural Design and Analysis of Hold-Down and Release Mechanism for Miniature Spacecraft
ZHANG Xiu-hua,YANG Zhen,QIU Feng
(College of Mechatronic Engineering, North University of China, Taiyuan 030051, China)
For a miniature spacecraft, and in order to design one kind of new non-pyrotechnic hold-down and release mechanism for a miniature spacecraft, we used the spring-link separation device and analyzed the feasibility. We described the working principle of the hold-down and release mechanism, and calculated the burn-off time. We carried out the burn-off experiment, and got the actual burn-off time. We did a simulation analysis of random vibration under the compaction status based on the ANSYS Workbench. The experiments show that the burn-off module is reliable and the differences between the theoretical and experimental values are within an error of 15%. The burn-off time has a 10% reduction with the addition of 10 N pre-tension. The simulation analysis suggests that the device has good vibration adaptability and can release the rotor in time. The hold-down and release system can meet the required standards of the miniature spacecraft.
spacecraft; hold-down and release mechanism; burn-off module for kevlar rope; random vibration
2016-05-12;
2016-06-20
張秀華(1991—),女,碩士研究生,主要從事機(jī)械結(jié)構(gòu)設(shè)計與仿真分析研究。
楊臻(1965—),男,教授,主要從事武器總體設(shè)計、機(jī)電一體化研究。
10.11809/scbgxb2016.10.025
張秀華,楊臻,邱楓.某航天器壓緊釋放裝置結(jié)構(gòu)設(shè)計與分析[J].兵器裝備工程學(xué)報,2016(10):117-120.
format:ZHANG Xiu-hua,YANG Zhen,QIU Feng.Structural Design and Analysis of Hold-Down and Release Mechanism for Miniature Spacecraft[J].Journal of Ordnance Equipment Engineering,2016(10):117-120.
V476.3
A
2096-2304(2016)10-0117-05