一種新型高鐵接觸網絕緣子沖洗機構優化及模態分析
2016-11-16 08:30:03王國志
現代機械 2016年5期
鄧 斌,鄭 濤,王國志,秦 萍
(西南交通大學機械工程學院,四川成都610031)
?
一種新型高鐵接觸網絕緣子沖洗機構優化及模態分析
鄧 斌,鄭 濤,王國志,秦 萍
(西南交通大學機械工程學院,四川成都610031)
運用ANSYS Workbench 對一種新型絕緣子沖洗機構的伸縮臂進行靜力學分析,并利用Design Exploration實現了以伸縮臂重量極小化為目標的截面參數優化。在滿足負載要求的前提下,伸縮臂整體質量減少22.1%(17.9 kg)。對處于工作狀態的伸縮機構進行模態分析,研究優化后機構在該狀態下的動態特性,結果表明:優化后機構在該狀態下的動態特性良好,優化結果可行。
沖洗機構 ANSYS Workbench 優化設計 模態分析
0 引言
絕緣子污閃已被公認是引發高鐵電氣化系統故障的最重要因素。絕緣子污閃放電的流程如圖1所示[1]。

圖1 絕緣子閃絡流程圖
目前絕緣子維護方式主要有:定期清掃方式;檢測更換方式;種類替換方式以及水沖洗方式[2]。
水沖洗技術因具有高效、省力、成本低的特點,在絕緣子維護領域得到非常廣泛的應用,是預防絕緣子發生污閃現象的有效措施。國外絕緣子水沖洗技術發展較早,水沖洗設備種類齊全。國外很多大型變電所采用固定水沖洗設備對絕緣子進行維護,這種沖洗方式作業時耗水量大、設備的成本高[3];日本Kyushu電子電力公司和安川電子公司共同研制出一種帶電水沖洗作業機器人,該機器人通過伸縮機構,可將噴嘴直接對準絕緣子進行沖洗作業,但該機器人并不能完全自動化,還需人工完成切割和連接戶外架空配電線路等工作[4];意大利Pisa University開發了通過直升機安放絕緣子水沖洗機器人的方式,但該方式成本高昂,技術難度大,操作困難[5]。
我國水沖洗技術雖然起步較晚,但是發展速度快。目前國內專用于絕緣子沖洗的設備有電力專用高空作業綜合水沖洗車、KJ系列絕緣子帶電水沖車以及便攜式小水量沖洗設備等。其中軌道牽引式水沖洗車由于蓄水量足,操作方便,沖洗效率高、效果好而廣泛應用在電氣化鐵路接觸網絕緣子維護工作中[6]。
不足之處是既有線鐵路和高鐵線路存在一定的區別,使得目前國內已有的牽引式絕緣子水沖洗車無法直接用于高鐵接觸網絕緣子維護,因此西南交通大學新型驅動中心研制出一種專用于高鐵接觸網絕緣子維護的牽引式水沖洗車,設備簡圖如圖2所示。
設備利用液壓系統控制沖洗機構,實時調整沖洗距離和沖洗角度,大大提升了沖洗效率和效果。
1 沖洗機構簡介

1-噴槍;2-擺動液壓缸1;3-擺動液壓缸2;4-伸縮臂;5-液壓缸2;6-基本臂;7-液壓缸1;8-回轉盤圖3 沖洗機構簡圖
沖洗機構是該設備及其關鍵的部件,其簡圖如圖3所示[7]。
沖洗機構在液壓動力的作用下可完成收縮、伸展、旋轉以及擺動四個動作,充分保證沖洗作業要求。沖洗機構的工作簡圖如圖4所示。

圖4 沖洗機構工作簡圖
其中,o為回轉機構中心;Lob表示機構回轉中心o距頂部絕緣子b的距離,是沖洗的最長距離;Lof表示機構回轉中心o距底部絕緣子f的距離。
調節伸縮臂和基本臂的長度和角度,可大幅度增長沖洗距離。
2 伸縮臂截面優化
沖洗機構依靠伸縮臂改變沖洗距離,傳統伸縮臂設計方式通常依據經驗選取較大的安全系數,這種設計方式雖然保證了臂架的力學性能,但卻降低了材料的使用效能。利用SolidWorks和ANSYS Workbench優化設計出伸縮臂截面參數,優化過程如圖5所示。

圖5 伸縮臂優化流程圖
其中,DM表示Workbench中的三維參數化模型,在SolidWorks中完成;DS表示Workbench中的有限元分析模型,在ANSYS Workbench中的Static Structural模塊完成;DX表示Workbench中優化過程,在ANSYS Workbench中Goal Driven Optimization中模塊完成。
2.1 參數化建模
伸縮臂由三節臂組成,臂截面為矩形。在SolidWorks中首先對第一節臂進行參數化建模[8],如圖6所示。

圖6 第一節臂截面尺寸參數化建模
其中,a是腹板的長度;b是翼板的長度;h1是上翼板的厚度;h2是下翼板的厚度;h3是腹板的厚度。在SolidWorks中分別命名為:DS_a;DS_b;DS_h1;DS_h2;DS_h3。
在優化過程中,臂與臂間滑塊的尺寸參數固定不變,故第二、第三節臂的截面參數可通過第一節臂的截面參數表示。其中各節臂腹板、翼板間距的數值關系如下所示。
DS_a-DS_a_s1=56 mm DS_b-DS_b_s1=50 mmDS_a-DS_a_s2=112 mm DS_b-DS_b_s2=100 mm
其中,DS_a_s1、DS_a_s2分別表示第二、第三節臂腹板的長度;DS_b_s1、DS_b_s2分別表示第二、第三節臂翼板的長度。
伸縮臂的主要作用力都集中在第一節臂上,第二、第三節臂負載較小,理論上基本臂的腹板和翼板的厚度應高于伸縮臂1、2的厚度,但考慮到沖洗機構整體承受的負載較小,各節臂的厚度本身較低,不利于焊接,因此第二、第三節臂的厚度與第一節臂對應相同。
2.2 靜力學分析
伸縮臂材料為低合金結構鋼Q345A,屈服強度為345 MPa,安全系數取1.33。許用應力[σ]=345/1.33=259.4 MPa;伸縮臂許用變形量[f]=7×10-6×l2=41 mm。
網格采用三角形網格劃分法,控制網格單元尺寸設置為15 mm,共生成171 718個節點,53 726個單元。零件間的connection type設置成contacts,contacts type設置為Bounded。
伸縮臂最危險工況是伸縮臂最長的工況,因此在對伸縮臂進行配合裝配時即是按照伸縮臂完全伸出的狀況進行裝配的。該工況下伸縮臂的負載包括:伸縮臂自重G1;支撐液壓缸2的作用力F1=5 288 N,垂直作用在伸縮臂表面;由1、2、6組成的噴嘴構件自重G2,經計算M2=165 kg,G2=1 617 N,方向鉛垂向下;沖洗作業時噴嘴的反作用力F2。

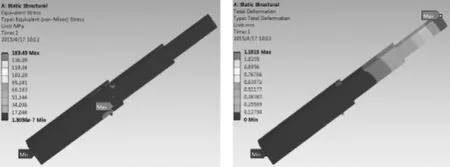
在Workbench中StaticStructural添加約束和力,伸縮臂的靜力學分析結果如圖7所示。伸縮臂的最大應力115.75MPa,出現在伸縮臂基本臂的下緣翼板前端和滑塊連接處;伸縮臂的變幅平面內最大變形量為0.79mm。

(a)最大應力云圖 (b)最大變形云圖圖7 伸縮臂靜力學結果
計算結果表明:伸縮臂最大應力小于許用應力[σ],且變形量遠小于許用值[f],因此結構存在較大的優化空間。
2.3 優化分析
優化設計時,截面參數為自變量,伸縮臂最大應力、最大變形量和質量為因變量,自變量取值范圍如表1所示,設置如表2所示[9]。

表1 自變量取值范圍

表2 優化目標及約束條件設置
Workbench中的Optimization模塊根據前期計算結果擬合得到3組滿足目標設置條件的候選參數值,結果如表3所示。

表3 優化結果
注:A、B、C是優化結果,由于A、C差別較小,圓整后兩組數據完全一樣。
由表3知,A、C組的質量一樣且最輕,并且最大應力和最大變形量都在強度和剛度條件要求范圍內,所以最終選擇A或C組作為最終優化結果。圓整A組參數,確定a=200 mm,b=185 mm,h1=4 mm,h2=6 mm,h3=3 mm。
建立伸縮臂優化后的三維模型,在同等載荷作用下,伸縮臂的應力云圖和變形云圖如圖8所示。
(a)最大應力云圖 (b)最大變形云圖圖8 優化后伸縮臂靜力學結果
伸縮臂優化前后的數據如表4示。

表4 優化結果分析
分析表4數據可知,伸縮臂優化前后,質量減少了17.9 kg,優化后臂重減輕22.1%;最大變形量值增加了0.47 mm,較優化前有所增加,但小于許用值41 mm;最大應力有所增加,但小于許用應力259 MPa。結果證明該優化設計方法在保證材料力學性能要求的前提下能提高材料使用效能,降低產品生產成本。
3 沖洗機構模態分析
3.1 振動激勵源
模態分析用以提取結構自由振動的振型和固有頻率,判斷結構的動態特性。沖洗機構安裝在鐵路軌道牽引平板車上,主要振動激勵源包括:軌道不平引起的振動、電機轉動引起的振動以及風載振動。三種激勵源的振動頻率如下:
(1)軌道不平引起的振動頻率
軌道不平引起的縱向振動對機構影響最大,激勵頻率計算公式為f=v/λ,f為頻率;v為列車運行速度;λ為波長,取值500 mm[10]。牽引平板車工作時運行速度為10 km/h,求出頻率為5.6 Hz;往返運行速度為120 km/h,求出頻率為66.7 Hz。
(2)風載振動的頻率
根據斯脫羅哈系數的求解公式確定橫風向旋渦脫落頻率,公式為f=Stv/B,St為斯脫羅哈系數,矩形截面通常取0.15;為來流的平均風速[11]。表5所示是前六級風速對應的旋渦脫落頻率。

表5 前六級風速及對應的旋渦脫落頻率
(3)電機振動頻率
電機轉動部分偏心引起的振動頻率計算公式為f=n/60,n表示電機實際轉速[12]。
3.2 模態分析
沖洗機構在處于全伸狀態時受外界振動激勵的影響最大,因此提取該狀態的前六階模態。首先在SolidWorks中建立沖洗機構全伸狀態裝配體,然后在ANSYS Workbech中建立Modal案例并導入模型,計算并提取機構的前六階模態。圖9是機構的前4階的模態分析結果。表6所示是機構的前6階振型。
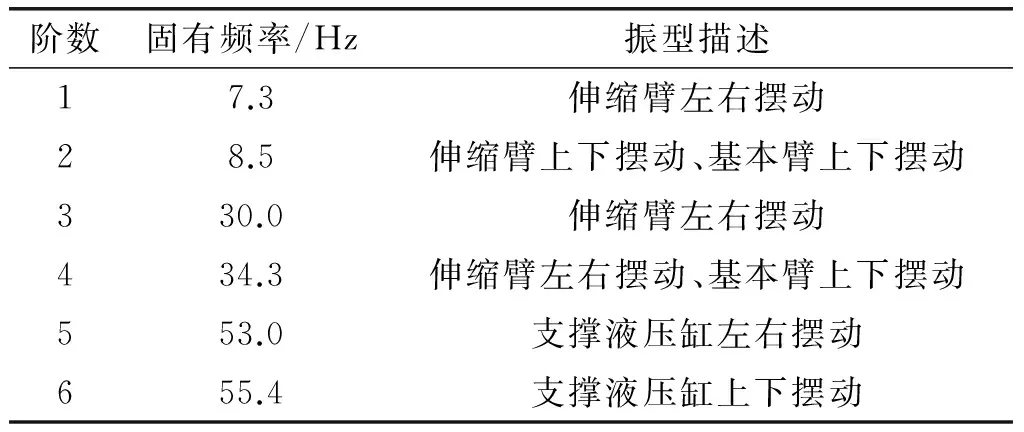
表6 沖洗機構前六階振型

圖9 沖洗機構前四階振型
分析圖9和表6可知,優化后沖洗機構的前6階固有頻率明顯避開了振動激勵源頻率,僅一階固有頻率和6級風速的最高旋渦脫落頻率7.3 Hz相等,因此在風速較高的天氣中應停止工作。通過n=f×60求出共振頻率下的電機轉速,電機選擇應避免上述轉速。
4 結語
本文對新提出的高鐵接觸網絕緣子沖洗機構進行有限元強度分析及模態分析,得到以下結論:
1)沖洗機構的長度范圍是3 300 mm到4 300 mm,在既定的接觸網支柱絕緣子沖洗位置處,機構能夠充分滿足不同位置絕緣子的沖洗要求。
2)在SolidWorks中對伸縮臂進行參數化建模,并利用Workbench對沖洗機構伸縮臂進行輕量化設計,在滿足力學性能的前提下,伸縮臂質量減輕17.9 kg,有效提高了材料的使用效能。
3)對優化后的沖洗機構進行了模態分析,結果表明機構動態特性基本良好,同時為機構使用過程中避免共振提供了參考數據。
[1] Miller H C. Surface flashover of insulators[J]. IEEE Transactions on Electrical Insulation, 1989, 24(5):765-786.
[2] Li X F, MacAlpine J M K, Chen J W, et al. A novel insulator and its characteristics[J].Journal of Southeast University(English Edition),2001,17(2): 47-51.
[3] 房光輝.高壓帶電清掃機器人移動載體的研究[D].上海:上海交通大學,2008.
[4] Nakashima M, Yakabe H, Maruyama Y, et al. Application of semi-automatic robot technology on hot-line maintenance work[C]//IEEE International Conference on Robotics and Automation. Nagoya: IEEE,1995:843-850.
[5] Pelacchi P. Automatic hot line insulator washing device positioned by helicopter[C]//IEEE 8th International Conference on Transmission & Distribution Construction, Operation & Live-Line Maintenance Proceedings. Orlando:IEEE,1998:133-143.
[6] 陳曉國,楊楚明,饒章權.變電設備帶電水沖洗技術探討[J].電網技術,2007,31(2):60-63.
[7] 劉洪良,林杰江,梁湛原,等. 含機械臂作業的變電設備帶電水沖洗裝備[J]. 電氣技術, 2014(10):81-84.
[8] Du W P, Zhang Y J, Zhou C Q, et al. Analysis and optimization of dismantling machine shear head based on ANSYS Workbench[J]. Advanced Materials Research, 2014, 945-949:653-657.
[9] 蘇世卿,劉雪東,李柏賢.基于Pro/E與Workbench的超大型蒸壓釜壁厚優化設計[J].機械設計與制造,2015(5):249-252.
[10] 趙勇.輕油罐車罐體的動力學分析[D].鄭州:鄭州大學,2006.
[11] 季斌.高層懸掛結構風致振動響應研究[D].南京:南京航空航天大學,2005.
[12] 武穎利, 蔡新, 李洪煊,等.機組振動下電站廠房共振校核和動力響應分析[J].人民黃河,2010,32(10): 141-143.
Optimization and modal analysis of a new-type insulator washing device for high-speed rail contact line
DENG Bin, ZHENG Tao, WANG Guozhi, QIN Ping
In this study, we carried out static analysis of the telescopic arm of a new-type insulator washing device with ANSYS Workbench, and with Design Exploration, we optimized the section parameters aiming at maximum stress, maximum deformation and minimum weight of the telescopic arm. Under the premise of meeting the load requirements, the overall weight of the telescopic arm was reduced by 22.1% (17.9 kg). We then carried out modal analysis of the telescopic arm at work, and the results showed that the optimized device had good dynamic performance, and that the optimization was feasible.
washing device, ANSYS Workbench, optimization, modal analysis
U469.6
A
1002-6886(2016)05-0020-05
鄧斌(1964-),男,湖北荊門人,教授,博士,研究方向:機電一體化及智能驅動。
2016-03-14
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
