仿生偏振視覺定位定向機理與實驗
2016-11-10 05:25:46王玉杰胡小平練軍想張禮廉何曉峰
光學精密工程 2016年9期
王玉杰,胡小平,練軍想,張禮廉, 何曉峰
(國防科技大學 機電工程與自動化學院,湖南 長沙 410073)
?
仿生偏振視覺定位定向機理與實驗
王玉杰,胡小平*,練軍想,張禮廉, 何曉峰
(國防科技大學 機電工程與自動化學院,湖南 長沙 410073)
為了有效利用全天域的偏振光信息,探究仿生偏振光導航機理,設計了偏振視覺傳感器。介紹了基于四相機的偏振視覺傳感器及其標定方法,推導了冗余配置下偏振態的最小二乘估計算法。分析了基于一階瑞利散射模型的天空光偏振模式,將太陽方向矢量的最優估計問題轉化為求解矩陣的特征向量問題,推導出了基于天空光偏振模式的定位定向算法。最后,設計了靜態實驗與轉動實驗,對理論分析結果進行了驗證。實驗結果顯示:測量的天空光偏振模式與瑞利散射模型相一致, 并可從中成功提取太陽方向矢量。靜態實驗測量的太陽天頂角的最大誤差約為0.4°,誤差標準差為0.14°;基于1 h對天空偏振光的觀測數據實現的定位誤差為68.6 km。轉動實驗(轉動兩周)得到的最大定向誤差約為0.5°,誤差標準差為0.28°。研究結果揭示了生物利用偏振光導航的機理,為仿生偏振光導航的應用提供了理論依據。
偏振視覺傳感器;仿生偏振導航;天空偏振模式;定位定向
1 引 言
自然界中的候鳥、昆蟲等在遷徙或覓食過程中,能夠利用它們獨特的眼睛結構感知并利用光的偏振現象,生物的偏振視覺可以幫助它們進行導航定位和目標識別等[1-2]。太陽光經過大氣粒子的散射能夠產生穩定的偏振模式,準確地描述這種偏振模式是仿生偏振光導航的基礎。1982年,Brines利用點源式偏振光測量儀獲得了粗略的天空偏振光分布模式[3]。2001年,Wehner教授基于Rayleigh散射定律構建了一種標準大氣偏振模型[4],隨后J.Gal等學者通過對北極地區天空偏振模式的測量驗證了Rayleigh散射模型的有效性[5]。2009年,晏磊等建立了天空偏振光分布的理論和實驗模型,并進行了全天空偏振測量[6]。2013年,趙開春等設計了天空光偏振模式自動探測裝置,用于獲取天空光偏振模式信息并構建天空光偏振模型[7]。2014年,Y.Zhang 等設計了基于液晶相位延遲器的全天域偏振圖像測量裝置,實現了天空光偏振模式的快速測量。范晨等分析了天空偏振模式對仿生偏振光定向的影響機理,并進行了相關實驗驗證[8]。
在仿生偏振光導航應用中,Lambrinos等人仿照沙蟻感知偏振光的策略,設計了基于POL-神經元模型的偏振光羅盤,并成功應用于移動機器人導航[9]。2004年,NASA開始研究偏振光輔助下的飛行器視覺導航,擬用于火星表面的航空探測,以應對火星多磁極、低重力以及無線電導航困難的情況[10]。褚金奎等設計了三通道偏振光檢測器,研究了儀器的標定技術和誤差補償方法[11-12]。盧鴻謙等從理論上分析了偏振光對組合導航系統的輔助作用[13]。楊中光和周軍等研究了對偏振光傳感器測角的誤差因素與補償方法[14]。劉俊教授也開展了天空偏振模式檢測等工作,設計了偏振光測角傳感器并探索了器件的微型化、陣列化設計[15]。褚金奎教授團隊提出了基于偏振光和磁航向的定位算法,該方法根據兩個偏振光傳感器測量的偏振角來估算太陽的位置,而后結合磁傳感器提供的航向角估計出載體的位置。該理論為解釋候鳥在遷徙途中的定位機理提供了依據[16]。程珍等設計了由天空偏振角測量裝置和OCTANS 慣導組成的定位系統,能夠實時地獲取相對可靠的地理位置[17]。
目前,國內外的偏振光導航側重于利用單點式測量的傳感器,容易受到環境干擾,魯棒性較差。生物行為學的研究表明,沙蟻的偏振光導航依賴于全天域大氣偏振模式,因此對這種導航機理進行探究具有重要意義[4]。本文旨在探究如何能有效利用全天域的偏振光信息,從而提高偏振光定位定向精度。首先系統介紹了一種基于四相機的偏振視覺傳感器以及天空偏振態的解算方法,提出了基于特征向量的太陽方向矢量估計方法,推導了基于天空光偏振模式的定位定向算法,最后對理論分析結果進行了實驗驗證。
2 偏振視覺傳感器
2.1系統構成與標定方法
本文設計的偏振視覺傳感器主要由4個相機(GC1031CP, Smartek)、4個廣角鏡頭(F1.4~F16, 焦距為3.5 mm)以及4個固定在CCD傳感器前面的偏振片組成,如圖1所示。4個相機的光軸朝向一致,分布在正方形的4個頂點上;與直線排列相比,正方形分布使得相機間重疊的視場最大,減小了相機間的視差。各相機的分辨率為1 034×778,視場角約為77°× 57.7°。4個偏振片繞通光軸按照0°,45°,90°,135°的方向安裝,這種安裝策略使得偏振態求解時所受的噪聲影響最小。另外,冗余的配置增強了系統的可靠性,無論哪一個相機出現故障,系統仍可正常工作。

圖1 偏振視覺傳感器
偏振視覺傳感器的標定主要包括以下3部分:(1)輻射計標定:將系統放在均勻的積分球光源下,測量各相機在不同強度光源照射下的響應,求解各相機的線性回歸方程,獲得其比例參數,從而補償各相機間的非一致性誤差。(2)偏振角標定:將系統固定在精密轉臺上,然后放置在標準偏振光源下,將轉臺旋轉至不同的位置,將轉臺讀數作為參考輸入,建立優化目標函數,從而估計出偏振片安裝角誤差以進行補償。(3)幾何標定:建立各相機的內參數模型,以及相機間的幾何約束模型,而后定義全局的待優化參數,通過觀測標準的棋盤格標定板,使得重投影誤差最小,從而補償相機的安裝誤差以及內參數誤差(系統的詳細介紹及標定過程參見文獻[18])。
在進行偏振態測量時,相機由同步控制器外觸發進行采樣,以確保曝光時間同步。所采集的數據由網線經交換機傳送給計算機,通過上位機對4幅圖像進行處理,就可得到偏振視覺傳感器所拍攝視場內的天空偏振模式。本文的實驗結果為事后離線處理。
2.2偏振態解算
對于某一方向的入射光,它的基本參數可以通過3次不相關的測量估計出來,因此需要將偏振片的光軸分布在幾個特定的方向。對于某一入射光P,4個相機的響應可以描述為:

(1)
式中:fj為第j個相機的亮度值;Kj為第j個相機的增益系數,通過標定得到;I為入射光的光強;d為入射光的偏振度;φ為入射光的偏振方向與參考方向的夾角;φj是第j個偏振片的光軸方向與參考方向的夾角。其中I,d,φ為待求量。
該偏振視覺傳感器屬于冗余配置,在進行偏振態解算時利用最小二乘法來獲得最優估計值。將式(1)改寫為:
fj/Kj=Idcos 2φcos 2φj+Idsin 2φsin 2φj+I.
(2)
定義如下矩陣:



式(2)可以表示為:
DX=F,
(3)
則X的最小二乘估計由下式給出:

(4)
入射光的偏振角和偏振度分別為:

(5)
式中x1,x2,x3為向量X的各分量。
3 天空光偏振模式與定位定向機理
3.1天空光偏振模式
天空光偏振模式是太陽光經過粒子散射后產生的偏振光在天空中形成的特殊分布模式,具有顯著的分布規律。晴朗的天氣條件下,散射粒子主要由大氣分子組成,其尺寸遠小于光的波長,因此可以用一階瑞利散射模型來描述晴朗天氣下的大氣散射過程,即散射光的E矢量(光波中的電振動矢量)方向垂直于散射面,如圖2所示。一階瑞利散射模型的詳細描述參考文獻[19]。

圖2 一階瑞利散射模型
圖2中O表示觀測者的位置,S表示太陽在天球上的方向,用天頂角γS和方位角αS來描述,其中天頂角與高度角互為余角;P代表觀測方向,其天頂角和方位角分別為γ和α;φ為該入射光的偏振角,它可以由偏振視覺傳感器直接測量得到。下面將推導如何從測得的天空光偏振模式提取出太陽方向矢量,從而用于載體的定位定向。首先定義如下右手直角坐標系:
相機坐標系(OcXcYcZc):選擇1號相機作為參考基準,Xc軸和Yc軸分別沿CCD傳感器的橫向和縱向,Zc軸為相機的光軸。系統經過調平后,Zc軸指向天頂方向。
入射光坐標系(OiXiYiZi):Zi軸指向觀測方向,Xi軸位于觀測方向所在的豎直平面(OPP′)內,Yi軸與Xi軸和Zi軸構成右手直角坐標系。為避免圖形過于復雜,圖2中沒有標出Yi軸。
圖像中的每一個像素點(xp,yp) 都與某一方向的入射光相對應(γ,α),對于校正后的圖像,其對應關系為:


(6)
式中:f為焦距,(cx,cy)T為光軸在圖像中的投影坐標。
E矢量方向在相機坐標系中可以表示為:

(7)


(8)
根據瑞利散射模型,散射光的E矢量方向垂直于散射面,即E矢量與太陽方向矢量s相互垂直,即:
eTs=0.
(9)

ETs=0N×1.
(10)
實際測量中,由于誤差的存在,太陽方向矢量s的最優估計可以表示為如下的優化問題:

(11)
為求解上述優化問題,定義方程:

(12)
式中λ是一個任意實數。將式(12)對s求導并令其等于零可得:

(13)
式(13)表明,s的最優估計為(EET)3×3的特征向量,λ為其對應的特征值。將式(13)代入式(12)可得:

(14)
因此,太陽方向矢量的最優估計為:矩陣EET的最小特征值所對應的特性向量。
3.2定位定向算法
偏振視覺定位的基本原理與航海中使用的天文定位方法類似。在慣性導航和無線電導航出現之前,簡單實用的天文導航是艦船航海的唯一導航手段。天文定位的基本原理如圖3所示。

圖3 天文定位原理圖
假設A,B為兩個已知的天體,天體A,B與地心O的連線與地球表面交于a,b兩點,這兩個交點稱為天體星下點,可以通過天文年歷得到。如果能測出載體到投影點的地心角γa和γb,則以a,b為極點,分別以γa,γb為半徑,在球面上作出兩個等高圓,它們交于M和M′兩點。這兩點中何者為真實位置,就是所謂的模糊度問題,通常可以根據載體的先驗位置信息來判斷,也可通過觀測多顆星來判斷,如文獻[20]中建立的三視場天文定位定向系統。
在實際應用中,天體高度角的測量誤差相當于等高圓半徑的不確定度,雙星定位的均方誤差可以近似表示為:

(15)

上面所觀測的兩個天體也可以通過在不同時刻觀測同一個天體來實現。通過測量天空偏振模式,按照式(11)提取出太陽的方向矢量s,則可以求得太陽的天頂角γS和太陽在載體系中的方位角αS,分別為:

(16)


(17)
這是一個典型的非線性最小二乘優化問題,可以通過迭代求解。
當估計出載體的位置以后,可以計算出太陽在當地地理坐標系中的方位角β,再結合式(16)即可解算出載體在地理系中的航向角ψ:
ψ=β-αS.
(18)
4 實驗驗證
在國防科大校園內分別進行了靜態實驗和轉動實驗。靜態實驗主要用于驗證仿生偏振視覺定位機理,而轉動實驗則用于測試其定向精度。
4.1靜態實驗
將實驗裝置放在樓頂開闊地帶,位置坐標為(E112.992°,N28.221°),時間為2015年12月16日。經過水平儀調平后,用偏振視覺傳感器測量天空的偏振模式,測量時間為1 h,從13:37至14:37,天氣晴朗,系統的采樣頻率設置為1 Hz。天空光偏振模式的測量結果及理論模型如圖4所示。

圖4 14:37時刻的天空光偏振模式
Fig.4Theoretical model and measurement result of skylight polarization pattern at 14:37
圖4中為14:37時刻測量的天空光偏振模式,此時太陽天頂角約為60.7°,測量結果與瑞利散射模型符合得較好[19],從偏振角模式中可以清晰看出太陽子午線。偏振度模式呈帶狀分布,與理論模型相一致,視場內的最大偏振度約為40%,這與理論值相差較大,主要由多次散射的去偏振效應引起。利用式(11)可以從該偏振模式中提取出太陽方向矢量,結合式(16)求得太陽的天頂角γS和太陽在載體系中的方位角αS。整個實驗過程中,太陽天頂角的變化曲線如圖5所示。
圖5表明測量的太陽天頂角與理論值相一致,最大誤差約為0.4°,誤差標準差為0.14°。基于這一小時內天空偏振光的測量結果,利用式(17)可以估計出載體的位置,定位結果為(E113.591°,N27.868°),定位誤差為68.6 km。根據式(15)可以計算出理論定位誤差:取太陽天頂角的測量誤差εγA=εγB=0.14°,1 h內太陽方位角的變化量(αA-αB)=15°,則有εM=85.2 km,可見理論誤差與實際的定位誤差基本一致。文獻[16]中基于偏振光和磁航向的定位精度約為100 km,文獻[17]中在OCTANS慣導的輔助下利用偏振光定位實現了約50 km的定位精度,本文中的定位誤差介于二者之間,誤差的量級與它們基本一致。

圖5 太陽天頂角的測量結果
在1 h的采樣時間內,載體是靜止水平放置的,太陽方位的變化同時引起了天空光偏振模式的變化。根據估計出的載體位置,可以計算出太陽在當地地理坐標系中的方位角,它相對于真北方向的方位角β從201.0°增加到215.5°;而根據測量的偏振模態可解算出太陽在載體系中的方位角αS,αS從20.9°增加到35.6°,整段時間內二者的變化規律相一致,如圖6所示。根據式(18),二者之差即為載體的航向角ψ,結果如圖6所示。
由于載體是靜止的,因此測量的航向角應保持不變,圖6中航向角的均值為180.1°,最大偏差約為0.4°,航向角的標準差為0.15°。結果表明,通過測量天空光偏振模式可以實現航向角的快速估計。

圖6 載體航向角估計結果
4.2轉動實驗
在上述靜態實驗的基礎上,為進一步驗證航向角的估計精度,進行了轉動測試。將偏振視覺傳感器固定在精密多齒分度臺上,該轉臺一周共有391格刻度,每格代表360/391=0.920 7°。實驗地點及日期均與上述靜態實驗相同,天氣晴朗。實驗中將轉臺從0刻度依次增加30格至390位置,而后依次減小30格至0位置;在每個位置進行一次天空光偏振態測量,共計采樣27次,相鄰采樣間的載體航向角相差±27.621 5°。采樣時間從16:40至16:43,共計3 min。
圖7給出了前兩次采樣中測量的天空光偏振模式,此時太陽天頂角約為80.4°,即太陽高度角略小于10°。圖中的直線表征了太陽在載體系中的方位角αS,即太陽子午線。可見,偏振角模態沿著子午線呈反對稱分布,且子午線處的偏振角為±90°,這與瑞利散射模型是一致的,即散射光的E矢量方向垂直于散射面(參考圖2);而偏振度模態沿著子午線呈軸對稱分布,視場內的偏振度達到了60%,遠大于靜態實驗中的40%(對應的太陽高度角約為30°)。根據瑞利散射模型,最大的偏振度發生在距離太陽90°的區域,而朝向太陽(或背離太陽)方向的偏振度最小,呈現出如圖7中所示的帶狀分布。因此,太陽高度角越小,天頂方向的偏振度越大。
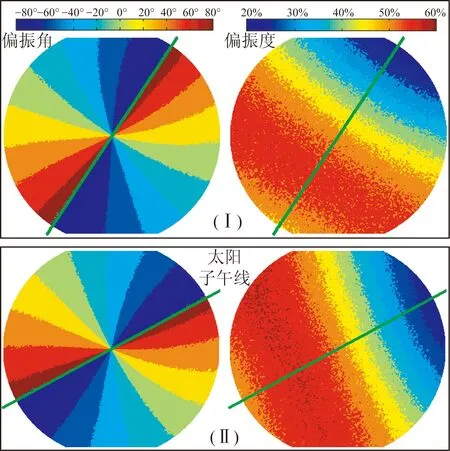
圖7 天空光偏振模式的前兩次測量結果

圖8 轉動過程中的定向誤差
對比(Ⅰ)和(Ⅱ)兩次采樣結果可知,測得的天空光偏振模式隨著轉臺的轉動而轉動。轉臺的轉動過程如圖8中的橫軸所示,從0位置轉至359.08° 然后回到 0位置。以轉臺的0位置作為參考,則輸出的航向角應與轉臺轉動的角度相一致,其差值即為定向誤差。整個轉動實驗過程中的定向誤差如圖8所示。結果表明,在轉動2周的過程中,最大的定向誤差約為0.5°,誤差標準差為0.28°,該指標可用來評估系統的定向精度。
5 結 論
本文設計了一種基于4相機的仿生偏振視覺傳感器,推導了冗余配置下偏振態的最小二乘估計算法。分析了基于一階瑞利散射模型的天空光偏振模式,并在此基礎上提出了基于特征向量的太陽方向矢量最優估計方法,推導了基于天空光偏振模式的定位定向算法。實驗結果表明:測量的天空光偏振模態與瑞利散射模型相一致,并從中成功提取出了太陽方向矢量。靜態實驗中測量的太陽天頂角的最大誤差約為0.4°,誤差標準差為0.14°,基于1 h內對天空偏振光的觀測結果實現的定位誤差為68.6 km。在轉動兩周的測試中,最大的定向誤差約為0.5°,誤差標準差為0.28°。本文揭示了生物利用偏振光進行導航的機理,設計的偏振視覺傳感器能夠實時測量天空光偏振模式,既可用于構建更加精確的大氣偏振模型,亦可用于載體的自主導航。
[1]MUHEIM R, PHILLIPS J, ?KESSON S. Polarized light cues underlie compass calibration in migratory songbirds [J].Science, 2006, 313:837-839.
[2]KARMAN S, DIAH S, GEBESHUBER I. Bio-inspired polarized skylight-based navigation sensors: a review [J].Sensors, 2012, 12(11):14232-14261.
[3]BRINES M L, GOULD J L. Skylight polarization patterns and animal orientation [J].JournalofExperimentalBiology, 1982, 96(1):69-91.
[4]WEHNER R. Polarization vision-a uniform sensory capacity? [J].JournalofExperimentalBiology, 2001, 204(14):2589-2596.
[5]GAL J, HORVATH G, BENNO V,etal.. Polarization patterns of the summer sky and its neutral points measured by full-sky imaging polarimetry in finnish lapland north of the arctic circle [J].ProceedingsoftheRoyalSocietyAMathematicalPhysical&EngineeringSciences, 2001, 457:1385-1399.
[6]晏磊, 關桂霞, 陳家斌,等.基于天空偏振光分布模式的仿生導航定向機理初探[J]. 北京大學學報:自然科學版, 2009, 45(4):616-620.
YAN L, GUAN G X, CHEN J B,etal.. The bionic orientation mechanism in the skylight polarization pattern [J].ActaScientiarumNaturaliumUniversitatisPekinensis, 2009, 45(4):616-620.(in Chinese)
[7]趙開春, 盧皓, 尤政. 天空光偏振模式自動探測裝置[J]. 光學 精密工程, 2013, 21(2):239-245.ZHAO K CH, LU H, YOU ZH. Automatic detection system of skylight polarized pattern [J].Opt.PrecisionEng., 2013, 21(2):239-245.(in Chinese)[8]范晨, 胡小平, 何曉峰, 等. 天空偏振模式對仿生偏振光定向的影響及實驗[J]. 光學 精密工程, 2015, 23(9):2429-2437.FAN CH, HU X P, HE X F,etal.. Influence of skylight polarization pattern on bionic polarized orientation and corresponding experiments [J].Opt.PrecisionEng., 2015, 23(9):2429-2437.(in Chinese)
[9]LAMBRINOS D, M?LLER R, LABHART T,etal.. A mobile robot employing insect strategies for navigation [J].RoboticsandAutonomousSystems, 2000, 30(1-2):39-64.
[10]THAKOOR S, MOROOKIAN J M, CHAHL J,etal.. BEES: Exploring mars with bioinspired technologies [J].Computer, 2004, 37(9):38-47.
[11]CHU J, ZHAO K, ZHANG Q,etal.. Construction and performance test of a novel polarization sensor for navigation [J].Sensors&ActuatorsA:Physical, 2008, 148(1):75-82.
[12]褚金奎, 王志文, 張英杰, 等. 多方向金屬光柵偏振器及在偏振導航中的應用[J]. 光學 精密工程, 2012, 20(10):2237-2244.
CHU J K, WANG ZH W, ZHANG Y J,etal.. Multi-orientated wire-grid polarizer and its application to polarization navigation [J].Opt.PrecisionEng., 2012, 20(10):2237-2244.(in Chinese)
[13]盧鴻謙, 尹航, 黃顯林. 偏振光/地磁/GPS/SINS組合導航方法[J]. 宇航學報, 2007, 28(4):897-902.
LU H Q, YIN H, HUANG X L. Polarized-light/geomagnetism/GPS/SINS integrated navigation [J].JournalofAstronautics, 2007, 28(4):897-902.(in Chinese)
[14]楊中光, 周軍, 黃河, 等. 偏振導航傳感器測角誤差分析與補償[J]. 光學 精密工程, 2014, 22(6):1424-1429.
YANG ZH G, ZHOU J, HUANG H,etal.. Analysis and compensation of angle errors of polarization navigation sensors [J].Opt.PrecisionEng., 2014, 22(6):1424-1429.(in Chinese)
[15]任建斌, 劉俊, 唐軍, 等. 利用大氣偏振模式確定太陽和太陽子午線空間位置法[J]. 光子學報, 2015(7):113-118.
REN J B, LIU J, TANG J,etal.. Skylight polarization pattern-based approach to the location of the sun and solar meridian [J].ActaPhotonicaSinica, 2015(7):113-118.(in Chinese)
[16]WANG Y, CHU J, ZHANG R,etal.. A novel autonomous real-time position method based on polarized light and geomagnetic field [J].ScientificReports, 2015, 5:9725.
[17]程珍, 梅濤, 梁華為,等.一種偏振光自定位方法的分析及實現[J]. 光電工程, 2015(6):33-38.
CHEN ZH, MEI T, LIANG H W,etal.. Analysis and implementation of the skylight polarization autonomous positioning method [J].Opto-ElectronicEngineering, 2015(6):33-38.(in Chinese)
[18]FAN C, HU X, LIAN J,etal.. Design and calibration of a novel camera-based bio-inspired polarization navigation sensor [J].IEEESensorsJournal, 2016, 16(10):3640-3648.
[19]WANG Y, HU X, LIAN J,etal.. Design of a device for sky light polarization measurements [J].Sensors, 2014, 14(8):14916-14931.
[20]吳量, 王建立, 王昊京. 基于最小損失函數的三視場天文定位定向[J]. 光學 精密工程, 2015, 23(3):904-912.
WU L, WANG J L, WANG H J. Three FOV celestial positioning and orientation with minimum loss function [J].Opt.PrecisionEng., 2015, 23(3):904-912.(in Chinese)

王玉杰(1988-),男,河南新鄉人,博士研究生,2010年于哈爾濱工業大學獲得學士學位,主要從事仿生導航、視覺導航等方面的研究。E-mail: yjwang@nudt.edu.cn
導師簡介:

胡小平(1960-),男,四川瀘州人,教授,博士生導師,專業技術少將,現為總裝備部慣性技術專家組副組長,IEEE高級會員,主要從事導航制導與控制、仿生導航等領域的研究。E-mail: xphu@nudt.edu.cn
(版權所有未經許可不得轉載)
Mechanisms of bionic positioning and orientation based on polarization vision and corresponding experiments
WANG Yu-jie, HU Xiao-ping*, LIAN Jun-xiang, ZHANG Li-lian, HE Xiao-feng(CollegeofMechatronicEngineeringandAutomation,NationalUniversityofDefenseTechnology,Changsha410073,China)*Correspondingauthor,E-mail:xphu@nudt.edu.cn
To make effectively use of the polarized light information of the whole horizon and to explore the mechanism of bionic polarized light navigation, a polarization vision sensor was designed. The polarization vision sensor based on four cameras was introduced and its calibration method was given. Then, the optimal estimation of the polarization state was derived based on least square algorithm. The skylight polarization pattern was analyzed based on the first order Rayleigh scattering model,the estimation of sun direction vector was translated into an optimization problem of finding the minimum eigenvector, and the positioning and orientation algorithm was derived. Finally, the theoretical analysis was verified by a static experiment and a rotation experiment. The results show that the measured skylight polarization pattern is consistent with the Rayleigh scattering model and the solar vector can be extracted successfully from it. In the static experiment, the maximum error of the solar zenith angle is about 0.4 °with the standard deviation of 0.14 °and the positioning error is about 68.6 km based on the observation data within one hour. In rotation experiment, the maximum orientation error is about 0.5° with the standard deviation of 0.28 °. This study reveals the mechanism of bionic navigation based on polarized light, and provides a theoretical basis for its applications to the bionic polarized light navigation.
polarization vision sensor; bionic polarization navigation; skylight polarization pattern; positioning and orientation
2016-04-11;
2016-06-11.
國家自然科學基金資助項目(No.61573371,No.61503403);國防科技大學科研計劃資助項目(No.JC14-03-04)
1004-924X(2016)09-2109-08
V249.32;O436.3
A
10.3788/OPE.20162409.2109
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
