三維激光掃描技術(shù)在深坑巖壁精細(xì)勘測中的應(yīng)用
2016-11-10 03:10:21祝文婷
土木建筑工程信息技術(shù) 2016年4期
關(guān)鍵詞:測量
祝文婷
(南京市牛首山文化旅游發(fā)展有限公司,南京 210000)
?
三維激光掃描技術(shù)在深坑巖壁精細(xì)勘測中的應(yīng)用
祝文婷
(南京市牛首山文化旅游發(fā)展有限公司,南京210000)
本文對(duì)三維激光掃描技術(shù)的基本原理、掃描儀分類、儀器選擇以及三維激光掃描業(yè)務(wù)的工作流程進(jìn)行全面的論述。根據(jù)項(xiàng)目實(shí)際情況,確定了掃描精度、站點(diǎn)以及標(biāo)靶,并運(yùn)用CYCLONE軟件和GEOMAGIC軟件對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行拼接、去噪等后處理,得到了滿足工程精度要求的深坑巖壁三維模型,為結(jié)構(gòu)基礎(chǔ)設(shè)計(jì)和護(hù)坡處理提供了精確建筑信息模型。文中的相關(guān)儀器選擇、參數(shù)取值以及后處理方法可供深坑巖壁的精細(xì)勘測提供工程參考。
深坑巖壁; 三維激光掃描技術(shù); 點(diǎn)云數(shù)據(jù); 數(shù)據(jù)后處理; 空間建模
【DOI】 10.16670/j.cnki.cn11-5823/tu.2016.04.13
1 引言
建造于復(fù)雜或特殊地貌之上的建筑結(jié)構(gòu),其基礎(chǔ)及圍護(hù)結(jié)構(gòu)設(shè)計(jì)對(duì)于地貌信息和數(shù)據(jù)的準(zhǔn)確度提出了很高的要求。傳統(tǒng)離散單點(diǎn)采集三維坐標(biāo)的方法,測點(diǎn)數(shù)量有限,測量效率低; 光學(xué)攝影的方法存在光學(xué)器件固有變形誤差和圖像數(shù)據(jù)轉(zhuǎn)換誤差,因而均不能滿足復(fù)雜及特殊地貌的工程使用勘測精度和測量周期要求。
三維激光掃描技術(shù)運(yùn)用激光測量原理,能夠在短時(shí)間獲得地貌信息大量且準(zhǔn)確的三維數(shù)據(jù)。配套的數(shù)據(jù)處理軟件可方便地對(duì)三維數(shù)據(jù)進(jìn)行后處理、調(diào)用分析和三維建模。方便建筑、結(jié)構(gòu)、暖通等各專業(yè)的數(shù)據(jù)調(diào)用和三維協(xié)同設(shè)計(jì)。相比傳統(tǒng)測量方式的上述優(yōu)勢(shì)使得其在建筑領(lǐng)域得以快速發(fā)展和應(yīng)用[1]。
本文首先對(duì)三維激光掃描技術(shù)的基本原理、常用掃描儀的分類及應(yīng)用、實(shí)際工程掃描儀的選擇以及掃描過程的工作流程進(jìn)行全面介紹; 然后結(jié)合南京牛首山佛頂宮項(xiàng)目中的深坑巖壁精細(xì)勘測,對(duì)三維激光掃描技術(shù)從前期方案設(shè)計(jì)到掃描操作,再到數(shù)據(jù)處理和三維建模的過程進(jìn)行了全面闡述。為三維掃描技術(shù)在相似深坑巖壁精細(xì)勘測中的應(yīng)用提供借鑒。
2 三維掃描技術(shù)概述
三維激光掃描技術(shù)(Three-dimensional Laser Scanning Technology,簡稱TLS技術(shù))利用激光測距原理、采用三維激光掃描系統(tǒng),能夠自動(dòng)、連續(xù)、快速地獲取待測對(duì)象表面密集的批量數(shù)據(jù),解決了傳統(tǒng)人工單點(diǎn)數(shù)據(jù)獲取方式所存在的勘測精度低、勘測速度慢的缺點(diǎn),是勘測領(lǐng)域的一次革命性的技術(shù)突破。
三維激光掃描系統(tǒng)主要由三維激光掃描儀、系統(tǒng)軟件和附屬設(shè)備三部分構(gòu)成,如圖1所示。系統(tǒng)軟件主要包括測控軟件和信息后處理軟件。附屬設(shè)備主要包括:數(shù)碼相機(jī)、計(jì)算機(jī)、電源、線纜、三腳架、定標(biāo)球、標(biāo)尺等。
2.1基本原理
三維激光掃描技術(shù)的基本原理:以三維激光掃描儀的激光發(fā)射處為坐標(biāo)原點(diǎn),儀器豎向掃描面豎直向上的坐標(biāo)軸為z軸,按右手坐標(biāo)系法則在儀器橫向掃描面垂直于z坐標(biāo)軸建立x、y坐標(biāo)軸,形成儀器坐標(biāo)系統(tǒng),如圖2所示。
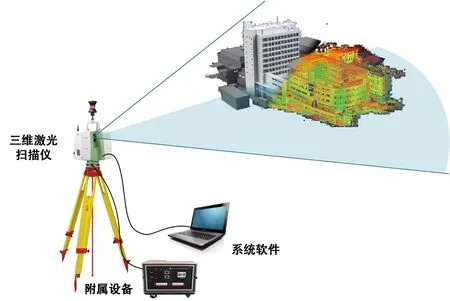
圖1 三維激光掃描系統(tǒng)構(gòu)成

圖2 三維激光掃描儀儀器坐標(biāo)系
以某一測點(diǎn)P為例:由激光束在豎向和橫向掃描面的射出角度可測得P點(diǎn)在儀器坐標(biāo)系統(tǒng)中的角度坐標(biāo)α、θ(仰角為正、俯角為負(fù)); 根據(jù)掃描儀不同的激光測距原理,可測得P點(diǎn)距儀器坐標(biāo)原點(diǎn)的距離s; 根據(jù)反射光的強(qiáng)度i,可以測得被測點(diǎn)的紋理信息; 即得到被測點(diǎn)相對(duì)于儀器坐標(biāo)原點(diǎn)的極坐標(biāo)及紋理信息(α,θ,s,i),根據(jù)式(2-1)將所得極坐標(biāo)系轉(zhuǎn)換為直角坐標(biāo)系坐標(biāo),得任意一掃描點(diǎn)P在儀器坐標(biāo)系統(tǒng)中的三維坐標(biāo)(x,y,z,i)。若已知測站的空間坐標(biāo),即可換算出任意掃描點(diǎn)的絕對(duì)坐標(biāo)值[2]。
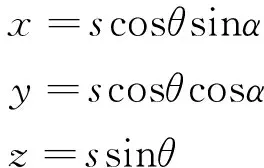
(2-1)
掃描儀在完成了一個(gè)θ剖面的測量后,掃描儀的上部就會(huì)圍繞z軸以較小的角度Δα進(jìn)行順時(shí)針或逆時(shí)針的旋轉(zhuǎn)來進(jìn)行下一個(gè)θ剖面測量的初始化。這樣重復(fù)進(jìn)行剖面掃描測量,連接多個(gè)剖面,構(gòu)成一幅掃描塊,掃描過程如圖3所示。
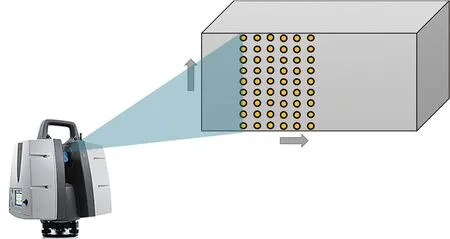
圖3 掃描過程示意圖
一個(gè)完整實(shí)體的測量往往需要從不同的位置進(jìn)行多次掃描才可獲取完整的實(shí)體表面信息。為實(shí)現(xiàn)不同位置的多個(gè)掃描塊之間的精確合并,通常要求不同的掃描塊(點(diǎn)云)在交接處至少有15%以上的重合區(qū)域,且重合區(qū)域要有比較明顯的特點(diǎn),為后續(xù)的點(diǎn)云數(shù)據(jù)拼接創(chuàng)造條件[3]。
2.2掃描儀的分類和選擇
三維掃描系統(tǒng)的核心設(shè)備為三維激光掃描儀,掃描儀產(chǎn)品類型繁多,需根據(jù)測繪條件和對(duì)象選擇掃描儀產(chǎn)品。常用三維激光掃描儀的應(yīng)用范圍及分類如表1所示。
根據(jù)掃描系統(tǒng)的運(yùn)行平臺(tái),三維激光掃描儀分為:機(jī)載(或星載)型激光掃描儀、車載型激光掃描儀、地面型激光掃描儀和手持型激光掃描儀。
根據(jù)激光的測距原理,三維激光掃描儀分為:脈沖式激光掃描儀、相位式激光掃描儀和激光三角式激光掃描儀。其激光測距原理分別為基于時(shí)間測量原理(Time-of-flight,簡稱TOF)、基于相位測量原理(Phase measurement)以及基于三角測量原理(Optical triangulation)。
根據(jù)有效的掃描范圍,三維激光掃描儀分為:短距離、中距離和長距離激光掃描儀。
表1 常用三維激光掃描儀的類型及應(yīng)用范圍
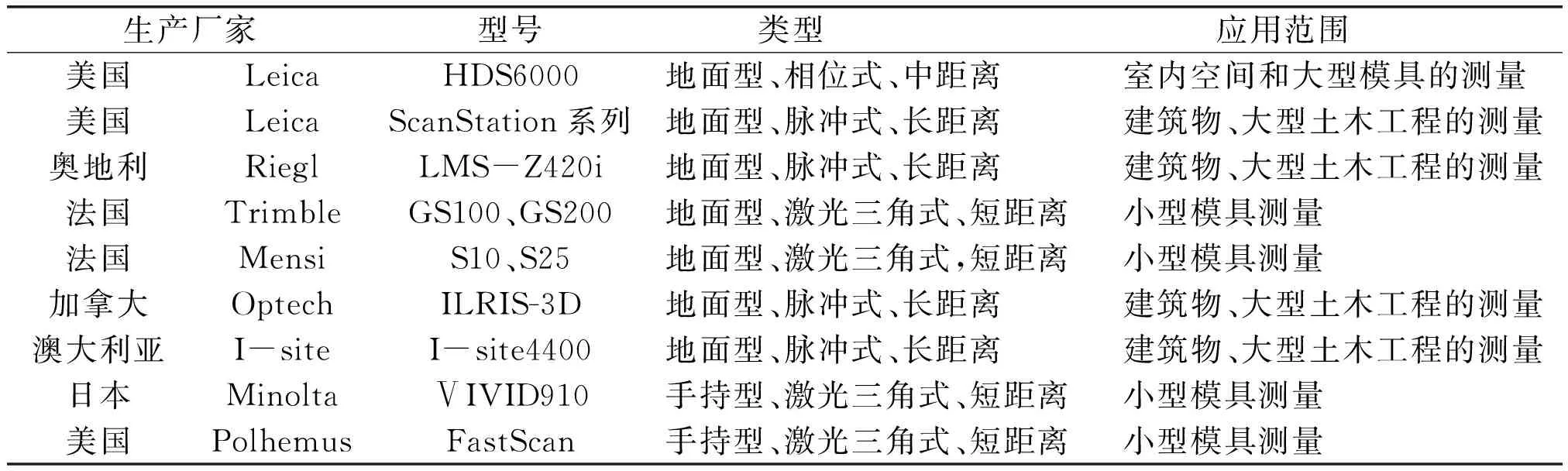
生產(chǎn)廠家型號(hào)類型 應(yīng)用范圍 美國LeicaHDS6000地面型、相位式、中距離室內(nèi)空間和大型模具的測量美國LeicaScanStation系列地面型、脈沖式、長距離建筑物、大型土木工程的測量奧地利RieglLMS-Z420i地面型、脈沖式、長距離建筑物、大型土木工程的測量法國TrimbleGS100、GS200地面型、激光三角式、短距離小型模具測量法國MensiS10、S25地面型、激光三角式,短距離小型模具測量加拿大OptechILRIS-3D地面型、脈沖式、長距離建筑物、大型土木工程的測量澳大利亞I-siteI-site4400地面型、脈沖式、長距離建筑物、大型土木工程的測量日本MinoltaⅤIVID910手持型、激光三角式、短距離小型模具測量美國PolhemusFastScan手持型、激光三角式、短距離小型模具測量
對(duì)于本文所述的深坑巖壁精細(xì)勘測,由于掃描范圍大于400m,機(jī)載、星載或車載型激光掃描儀附屬設(shè)備價(jià)格高昂,故選用型號(hào)為Leica ScanStation C10的地面型、脈沖式、長距離三維激光掃描儀。
2.3Leica ScanStation C10三維激光掃描儀
本文選用的Leica ScanStation C10掃描儀的實(shí)物圖及構(gòu)造圖如圖4所示。主要構(gòu)造包括:距離測量系統(tǒng)、橫向和豎向角度測量系統(tǒng)、X棱鏡、激光垂準(zhǔn)儀以及雙軸補(bǔ)償器。

(a)實(shí)物圖
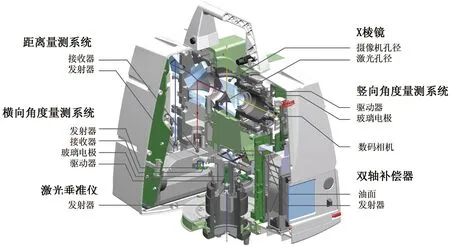
(b)構(gòu)造圖圖4 Leica ScanStation C10實(shí)物及構(gòu)造圖
橫向和豎向角度測量系統(tǒng)內(nèi)的精密時(shí)鐘控制編碼器同步測量每個(gè)激光脈沖橫向掃描角度值α和縱向掃描角度值θ。測距系統(tǒng)的基本原理為TOF基于時(shí)間的測量原理,測距的基本過程為[4]:
1)激光發(fā)射:發(fā)射器中的激光脈沖發(fā)射體在觸發(fā)脈沖的作用下,發(fā)出一個(gè)極窄高速激光脈沖信號(hào),并通過X棱鏡改變方向射向物體,同時(shí),激光信號(hào)被取樣而得到主脈沖;
2)激光探測:通過同一個(gè)掃描鏡和望遠(yuǎn)鏡收集經(jīng)物體反射回來的激光回波,通過接收器接受反射回來的激光脈沖信號(hào);
3)時(shí)延估計(jì):對(duì)接受器接受到的不規(guī)則回波信號(hào)進(jìn)行相應(yīng)相關(guān)處理,生成精確的回波脈沖信號(hào);
4)時(shí)間延遲測量:由精密原子鐘控制的精密計(jì)數(shù)器通過距離計(jì)數(shù)方法測量出激光回波脈沖與激光發(fā)射主脈沖之間的時(shí)間間隔,進(jìn)而計(jì)算得物體與發(fā)射器間的距離。
2.4TLS測量系統(tǒng)工作流程
TLS測量系統(tǒng)的工作主要有三個(gè)階段:方案設(shè)計(jì)階段、數(shù)據(jù)采集階段和后處理階段。
方案設(shè)計(jì)階段主要針對(duì)待測物尺寸、細(xì)部特征及場地條件,進(jìn)行采樣密度、站點(diǎn)數(shù)量、設(shè)站位置以及掃描路線進(jìn)行現(xiàn)場勘察及方案設(shè)計(jì)。
數(shù)據(jù)采集階段采用三維激光掃描系統(tǒng)在設(shè)計(jì)站點(diǎn),采用合適的掃描分辨率,在保證掃描區(qū)無人車干擾的情況下進(jìn)行掃描作業(yè),獲取待測物表面空間位置的點(diǎn)云數(shù)據(jù),并初步檢測數(shù)據(jù)是否滿足要求并進(jìn)行初步質(zhì)量分析和控制[5]。
后處理階段運(yùn)用點(diǎn)云處理軟件將各站點(diǎn)采集得的點(diǎn)云數(shù)據(jù)進(jìn)行拼接和歸并、去噪處理、坐標(biāo)糾正等工作,再利用三維建模軟件對(duì)處理后的點(diǎn)云數(shù)據(jù)進(jìn)行曲面擬合,建立三維模型。
整個(gè)TLS測量系統(tǒng)的工作流程,如圖5所示。
3 工程應(yīng)用
TLS技術(shù)在土木建筑領(lǐng)域的應(yīng)用正處于快速發(fā)展時(shí)期,應(yīng)用涉及古建筑重建、文物保護(hù)、地形勘測、城市規(guī)劃等諸多方面。本文將基于上述TLS技術(shù)原理、設(shè)備和工作流程將其應(yīng)用于南京牛首山項(xiàng)目工程深坑巖壁結(jié)構(gòu)的精細(xì)勘測之中,為工程設(shè)計(jì)提供深坑巖壁的建筑信息模型。

圖5 TLS測量系統(tǒng)工作流程
3.1項(xiàng)目介紹
南京牛首山位于南京市江寧區(qū),因山體東、西兩主峰形如牛頭雙角得名。西峰山體由于1937和1958年兩次破壞性的鐵礦開采,形成如圖6所示深礦坑:礦坑垂直高差近70m,長邊跨度近400m。

圖6 牛首山西峰礦坑
牛首山佛頂宮鋁合金網(wǎng)殼項(xiàng)目建立于深礦坑之上,如圖7所示。項(xiàng)目由大、小兩個(gè)鋁合金單層網(wǎng)殼結(jié)構(gòu)組成,建筑總高89.3m,總建筑面積近10×104m2,主體建筑共9層,地下6層,是國內(nèi)首個(gè)建在廢棄礦坑內(nèi)的大型公共建筑項(xiàng)目。
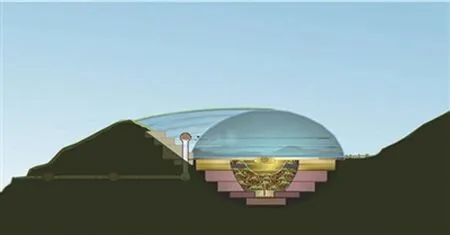
圖7 建于深礦坑之上的牛首山佛頂宮
3.1主要技術(shù)難點(diǎn)
該項(xiàng)目的主要技術(shù)難點(diǎn)在于:
(1)深礦坑邊緣存在滑坡危險(xiǎn),需在山體兩側(cè)護(hù)坡打下500多根防滑樁,使用長達(dá)150km的錨索固定山體,需要等高線等地貌數(shù)據(jù)。
(2)建筑主體完全由深礦坑底部支承,基礎(chǔ)設(shè)計(jì)需要對(duì)詳細(xì)精準(zhǔn)的地貌數(shù)據(jù),但由于爆破開挖過程無法準(zhǔn)確設(shè)計(jì),開挖后若根據(jù)基礎(chǔ)設(shè)計(jì)對(duì)深坑地貌進(jìn)行局部調(diào)整的成本過高,需要實(shí)時(shí)準(zhǔn)確的地貌數(shù)據(jù)。
(3)機(jī)電設(shè)備、給排水管線、暖通通風(fēng)設(shè)備和管道系統(tǒng)的設(shè)計(jì)可能因?qū)嶋H地貌而進(jìn)行調(diào)整,調(diào)整會(huì)引起管線沖突與干涉,精準(zhǔn)的深坑巖壁地貌三維勘測資料對(duì)于專業(yè)間的溝通協(xié)調(diào)也十分重要。
傳統(tǒng)的勘測方法受限于測量精度、測量周期,且無法高效的轉(zhuǎn)換為建筑信息模型,無法解決本項(xiàng)目的技術(shù)難點(diǎn)。因此采用三維激光掃描技術(shù)對(duì)深坑巖壁進(jìn)行精細(xì)勘測,為項(xiàng)目設(shè)計(jì)提供精確建筑信息模型。
3.2掃描方案設(shè)計(jì)
3.2.1采樣精度設(shè)計(jì)
選擇合適的采樣間隔對(duì)于數(shù)據(jù)存儲(chǔ)量、勘測精度、掃描速度和后期處理難度有直接關(guān)系。采樣間隔過大,數(shù)據(jù)量小、勘測精度低、掃描速度快,可能導(dǎo)致后期處理數(shù)據(jù)不足,待測對(duì)象信息反映不全面。采樣間隔過小,數(shù)據(jù)量大、掃描速度慢,雖然勘測精度高,但整個(gè)過程對(duì)于存儲(chǔ)設(shè)備、勘測周期以及后期處理設(shè)備要求較高。因此需根據(jù)項(xiàng)目實(shí)際情況,合理的選擇采樣精度[6]。根據(jù)本項(xiàng)目工程設(shè)計(jì)的精度要求,掃描采用了較高的采樣密度,采樣精度為2mm。
3.2.2站點(diǎn)位置選取
測量選擇多個(gè)站點(diǎn),從不同的位置進(jìn)行多次掃描,并在實(shí)地部分位置放置通視標(biāo)靶(公共標(biāo)志球),以實(shí)現(xiàn)多次掃描的精確合并,便于后處理階段點(diǎn)云數(shù)據(jù)拼接。項(xiàng)目選擇17個(gè)站點(diǎn)和23個(gè)標(biāo)靶(公共標(biāo)志球),站點(diǎn)及標(biāo)靶(公共標(biāo)志球)布置如圖8所示。

(a)站點(diǎn)布置

(b)標(biāo)靶布置圖8 項(xiàng)目站點(diǎn)及標(biāo)靶布置
3.3點(diǎn)云數(shù)據(jù)處理與三維建模
3.3.1點(diǎn)云數(shù)據(jù)分站導(dǎo)出
采用cyclone軟件將不同角度所得深坑巖壁點(diǎn)云數(shù)據(jù)導(dǎo)出并顯示,以其中三個(gè)站點(diǎn)數(shù)據(jù)為例,站點(diǎn)11、站點(diǎn)12和站點(diǎn)13導(dǎo)出的點(diǎn)云數(shù)據(jù)如圖9a-(c)所示。
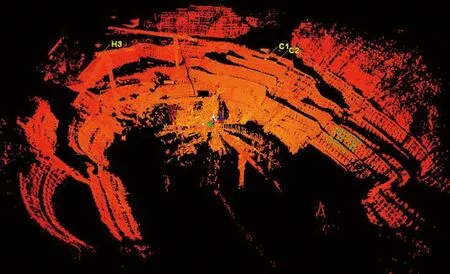
(a)站點(diǎn)11

(a)站點(diǎn)12

(c)站點(diǎn)13圖9 部分站點(diǎn)點(diǎn)云數(shù)據(jù)圖
3.3.2點(diǎn)云數(shù)據(jù)拼接和去噪處理
利用cyclone軟件對(duì)分站點(diǎn)云數(shù)據(jù)進(jìn)行拼接總裝。軟件自動(dòng)選取兩站中3個(gè)以上同名控制點(diǎn)實(shí)行拼接,拼接完成的數(shù)據(jù)再次利用數(shù)據(jù)融合功能將重合部分的數(shù)據(jù)進(jìn)行歸并,以避免數(shù)據(jù)的冗余和不一致。經(jīng)過多站拼接后,各站點(diǎn)云數(shù)據(jù)處于統(tǒng)一的坐標(biāo)系中,即2.1節(jié)所述儀器坐標(biāo)系統(tǒng),通過添加基站式GPS接收機(jī)進(jìn)行量測所得的全局控制點(diǎn),建立其與地理坐標(biāo)系的位置關(guān)系。
由于掃描過程中外界環(huán)境因素對(duì)掃描目標(biāo)的阻擋和遮掩,如掃描過程中移動(dòng)的車輛、行人樹木的遮擋,及建筑物本身的反射特性不均勻,導(dǎo)致最終獲取的掃描點(diǎn)云數(shù)據(jù)內(nèi)可能包含不穩(wěn)定的點(diǎn)和錯(cuò)誤的點(diǎn),這些影響將導(dǎo)致點(diǎn)云數(shù)據(jù)含有偏差。因此點(diǎn)云數(shù)據(jù)拼接后的預(yù)處理工作,主要是清除一些不正確的數(shù)據(jù),獲取有效數(shù)據(jù),即去噪處理。
拼接和去噪處理后的點(diǎn)云數(shù)據(jù),如圖10所示。
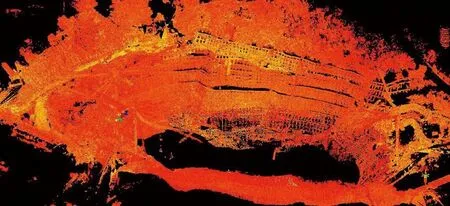
圖10 拼接和去噪處理后的點(diǎn)云數(shù)據(jù)圖
3.3.3三維建模
基于點(diǎn)云數(shù)據(jù)的三維建模方法主要有三種,分別為軟件自動(dòng)匹配建模、基于GEOMAGIC建模和人工手動(dòng)建模,其適用對(duì)象如表2所示。
表2 基于點(diǎn)云數(shù)據(jù)的三維建模方法
方法應(yīng)用范圍軟件自動(dòng)匹配建模常規(guī)幾何體基于GEOMAGIC建模多邊形的不規(guī)則曲面建模人工手動(dòng)建模復(fù)雜的不規(guī)則模型
軟件自動(dòng)匹配建模適用于能夠分解為軟件提供的常用幾何形體(如:孔、圓柱、圓錐等)的目標(biāo)實(shí)體組件,對(duì)于本項(xiàng)目中大量無法分解為常用幾何形體的目標(biāo)實(shí)體的建模該方法具有很大的局限性。
人工手動(dòng)建模的方法雖使用與本項(xiàng)目的三維數(shù)據(jù)建模但需要大量的人工勞動(dòng)和建模人員的經(jīng)驗(yàn)。
因此,本項(xiàng)目采用第二種方法,對(duì)深坑巖壁進(jìn)行三維建模,為減小模型數(shù)據(jù)文件、提高建模效率,在保證工程精度的前提下對(duì)不關(guān)心區(qū)域進(jìn)行網(wǎng)格簡化處理,基于GEOMAGIC的牛首山礦坑三維整體模型如圖11所示。

圖11 牛首山礦坑三維整體模型
4 結(jié)論
本文從三維激光掃描技術(shù)的基本原理、三維激光掃描儀的分類和選擇以及三維激光掃描系統(tǒng)的工作流程入手,結(jié)合南京牛首山佛頂宮項(xiàng)目中的深坑巖壁精細(xì)勘測,對(duì)三維激光掃描技術(shù)從前期方案設(shè)計(jì)到掃描操作,再到數(shù)據(jù)處理和三維建模的過程進(jìn)行了全面闡述。主要結(jié)論如下:
(1)對(duì)于牛首山西峰這種測量范圍大于400米的工程,采用地面型、脈沖式、長距離三維激光掃描儀比較適用,可以保證足夠的工作效率和掃描精度。
(2)對(duì)于類似牛首山佛頂宮深坑巖壁項(xiàng)目,采用三維激光掃描技術(shù),測得工程點(diǎn)云數(shù)據(jù),并對(duì)其進(jìn)行數(shù)據(jù)拼接、去噪等技術(shù)處理,結(jié)合通用三維數(shù)字建模軟件,可以建立比較準(zhǔn)確的三維數(shù)字模型,為結(jié)構(gòu)基礎(chǔ)設(shè)計(jì)及湖泊處理提供準(zhǔn)確的地貌三維建筑信息模型。
(3)在工程管理中根據(jù)項(xiàng)目特點(diǎn),合理采用三維激光掃描技術(shù),結(jié)合信息化、數(shù)字化手段,可以保證施工現(xiàn)場勘察數(shù)據(jù)的準(zhǔn)確性,為設(shè)計(jì)提供可靠的依據(jù),同時(shí)提高施工效率,保證項(xiàng)目順利推進(jìn)。
[1]Rudolf STAIGER.Terrestrial Laser Scanning Technology,Systems and Applications[C].2nd FIG Regional Conference.Marrakech,Morocco,December 2-5, 2003.
[2]馬俊偉, 唐輝明,胡新麗,等.三維激光掃描技術(shù)在滑坡物理模型試驗(yàn)中的應(yīng)用[J].巖土力學(xué), 2014, 35(5): 1495-1505.
[3]宋宏. 地面三維激光掃描測量技術(shù)及其應(yīng)用分析[J].測繪技術(shù)裝備, 2008(2): 40-43.
[4]張會(huì)霞. 三維激光掃描點(diǎn)云數(shù)據(jù)組織與可視化研究[D].中國礦業(yè)大學(xué)(北京), 2010.
[5]劉春, 楊偉.三維激光掃描對(duì)構(gòu)筑物的采集和空間建模[J].工程勘察, 2006(4): 49-53.
[6]馬立廣. 地面三維激光掃描測量技術(shù)研究[D].武漢:武漢大學(xué), 2005.
Application of 3D Laser Scanning Technology to Accurate Geological Survey of Palisades
Zhu Wenting
(NanjingNiushouMountainCulturalTourismDevelopmentCo.,Ltd.,Nanjing210000,China)
This article introduces fundamentals of Three-dimensional Laser Scanning(TLS)technology,categorizing and selecting of three-dimensional laser scanner and workflow of TLS system.According to actual project condition,accuracy,sites and targets of scanning are determined.Merge and de-noising of point-clouds data are completed using software CYCLONe and GEOMAGIC.3D model of the palisades meeting requirements of engineering accuracy is established to provide exact geological data for design of foundation and slope protection.Device selection,parameter selection and method of post-processing in this article can provide
for other similar accurate geological survey of palisades.
3D Laser Scanning Technology; Point Clouds Data; Data Post-processing; Spatial Modeling
祝文婷(1976-),女,工程師。主要從事項(xiàng)目設(shè)計(jì)與施工管理工作。
TU198+.6;P633;TU3
A
1674-7461(2016)04-0073-06
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
