基于參量陣的M FSK水聲通信技術研究
2016-11-09 07:32:09李興勇宋業強電子科技大學航空航天學院四川成都611731
電子設計工程 2016年19期
李興勇,宋業強,李 倫,陳 敏(電子科技大學 航空航天學院,四川 成都611731)
基于參量陣的M FSK水聲通信技術研究
李興勇,宋業強,李 倫,陳 敏
(電子科技大學 航空航天學院,四川 成都611731)
介紹了參量陣理論和MFSK水聲通信原理及特點。在水聲通信中,由于水聲信道具有有限的信道帶寬、隨機時變-空變-頻變和信道多途干擾的特性,這些因素都制約著水聲通信技術發展。針對上述一些問題,提出了一種基于參量陣的MFSK水聲通信方式,并給出了基于參量陣定向傳輸算法的調制方法,利用信道的非線性作用實現參量陣的自解調得到調制信號。仿真、實驗結果表明:這種具有高度指向性的通信方式在水聲通信中具有明顯的抗干擾能力,能有效的抑制信道的多途效應。這種具有較高的水聲通信質量的方式在水下通信中具有很高的應用價值。
MFSK;水聲通信;非線性作用;多途效應
水下通信技術按手段通常分為電磁波通信和非電磁波通信。由于電磁波在水中的衰減系數較大,而聲波作為非電磁波能夠實現水下遠距離傳輸。因此,水下通信主要是水下聲波通信。國內外對于水聲通信的研究已經投入了大量的資源和時間,并取得了較大的發展和進步。
但是,仍然存在很多關鍵問題,如水聲信道時間、頻率上的雙重擴展的影響產生嚴重的多途效應,引起信號的衰落失真和信號間相互干擾等問題[1]。本文基于對水聲參量陣通信技術的研究,以一種創新的通信方式提高水下通信質量。當聲場中同時存在兩個高強度聲波是,產生差頻波及和頻波,從水聲工程的角度來看,由兩個高強度聲波產生差頻波即為水聲參量陣。
1 水聲參量陣理論模型
根據線性聲學原理,聲場中同時存在著兩個不同頻率的聲波,總的聲場p(t)只是兩個聲波的線性疊加。例如,存在兩個頻率分別為ω1和ω2,振幅分別是P1和P2的正弦波,假如二者傳播方向相同,處相相同,則聲場的聲壓為:

但是,由于線性聲學是建立在均勻介質的環境條件下,并忽略了信號對傳播介質的影響。在實際環境中,聲波信號對介質產生擾動,導致聲波信道介質的不均勻性并產生“聲散射聲”現象。在非線性聲學的作用下,散射聲中將存在兩個聲波的差頻、和頻及諧波成分。此時,聲場的聲壓表達式為:


其中S表示非線性效應的聲壓強度,參量陣在實際應用中,差頻信號S cos((ω1-ω2)t)/2是我們重點研究并應用的對象。參量陣聲場因為是一個累加場,差頻波的總能量是隨著傳播距離的增加而增加的,排除差頻波的吸收效應,近場的聲源級要比遠場聲源級低,從而保證了參量陣具有較遠的傳播距離的特點[2]。
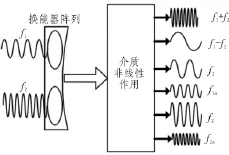
圖1 水聲參量陣非線性作用示意圖
非均勻介質中的非線性作用實現了信號的自解調,Westervelt在準直平面波的假設下根據流體力學于1963年提出了差頻聲壓計算公式[3]:

式中β是介質的非線性參數,ωs是差頻,P1和P2分別是兩個源波幅度,ρ0是介質密度,c0介質中的聲速,S0波束橫截面積,ks差頻波波數,θ方向角,R點到聲源的距離,R?1/α,α=(α1+α2)/2,其中α1、α2分別是兩個源波的吸收系數,1/α通常稱為參量陣的有效陣長。根據參量陣的指向性特性可知差頻波波束很窄,在理論和實驗條件下均滿足以下公式[4]:

上述結論只適用于準直平面波,并沒有考慮擴散因子,不能適用于遠場擴散區。Berktay和Leahy在考慮擴散因子之后得出遠場差頻聲場公式[5]:
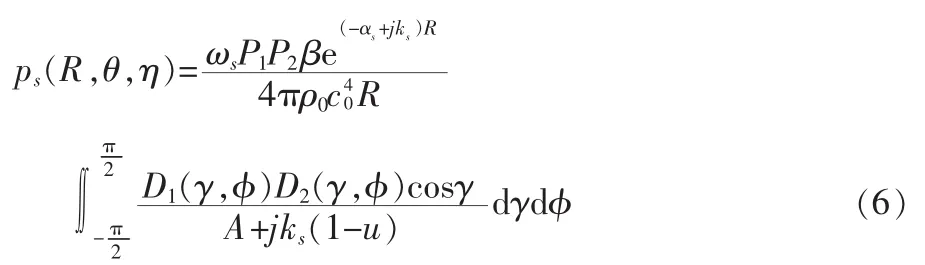
式(6)中A=(α1+α2)/2-αs,αs是差頻波的吸收系數,u= cosγcosθcos(φ-η)+sinγsinθ,θ、η分別是場源的方向角,γ、φ分別是源點的方向角,D1、D2分別是兩個原波的方向函數,其余物理參數同式(4)。根據上述公式可以明顯看出,式(6)考慮了差頻本身的吸收效應。
2 水聲通信技術
水聲信道作為水聲通信系統的傳播媒介,它和常規的無線電信道既有相似也有其獨特性,隨著無線移動網絡技術的發展壯大,水聲通信技術也在其影響下取得了一定的發展。
調制是指用來自信源的數字基帶信號去調制某個載波,載波是一個固定或者確定的周期性信號,一般為余弦信號。
你們急個啥?老冬瓜說。老鱖魚可沒說要殺誰。他那把刀子,有一尺多長,鋒利著呢,刀片可也不薄,握在手里正好,沉甸甸的,滿有手感。

式(7)是載波信號的一波變道時,其中A為振幅,f為載波頻率,φ為載波的初始相位。式中的3個參量:振幅、頻率、相位都可以被單獨的調制編碼。根據需要調制的參數的不同,可以把調制方式基本分為振幅鍵控 (ASK)、頻移鍵控(FSK)、相移鍵控(PSK)。在3種調制方式的基礎上發展處了多進制的調制方式:多進制振幅鍵控(MASK)、多進制頻移鍵控(MFSK)、多進制相移鍵控(MPSK)。

圖2 3種調制方式
水聲通信具有其獨特性:多途效應,是影響水聲通信的主要因素。在上述3種方式中,相移鍵控是最容易被干擾、信號接收處理最復雜的方式,而振幅鍵控也容易被外界信號所干擾。頻移鍵控作為一種能量檢測(非相干)而不是相位檢測(相干)算法,FSK系統被認為對于信道的時間和頻率擴展具有固有的穩健特性[7]。
2FSK的基本原理是用不同的基帶數字信號來調制載波信號的頻率,即不同的調制頻率分別表示數字信號0或1,如表達式(8):

上式中φ0和φ1分別是載波信號的初始相位,A為信號幅值,f0和f1分別表示了數字信號的0和1,其中m進制頻移鍵控的調制頻率為fm∈(f0f1f2…fm-1),一般m是2的N次方。傳統FSK水聲通信系統如圖3所示:
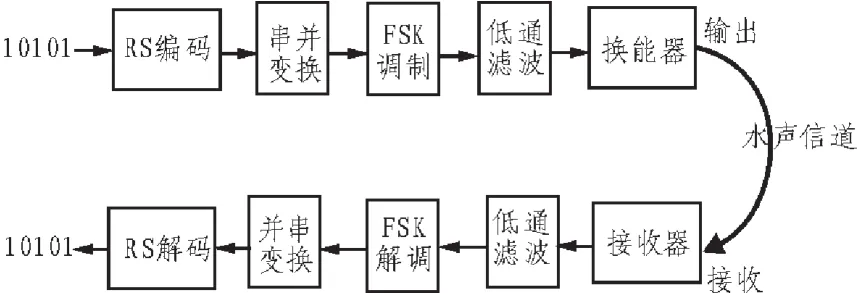
圖3 MFSK水聲通信系統框圖
盡管FSK調制解調有很好的可靠性,但是普通聲源在信號傳輸中存在較大的多途效應,嚴重影響通信質量,現階段水聲通信技術通過線性調頻等算法來實現幀信號同步及信號檢測來彌補信道的多途效應。
3 基于參量陣的MFSK水聲通信
為了進一步解決水聲信道的多途效應所帶來的信號干擾,本文提出一種能很好綜合水聲參量陣和水聲MFSK調制算法有點的水聲通信方式,該方法利用水聲參量陣的高指向性進行信號傳輸不僅能有效的減少信道的多途效應,同時能夠在通信過程中保證通信過程中的安全性。水聲參量陣聲場因為是一個累加場,差頻波fm的總能量是隨著傳播距離的增加而增加的,排除差頻波的吸收效應,遠場的聲源級要比近場聲源級高,從而保證了參量陣具有較遠的傳播距離[6]。本文的水聲通信系統對數字編碼的數據采用了頻移鍵控(FSK)調制方式。作為一種能量檢測(非相干)而不是相位檢測(相干)算法,MFSK系統被認為對于信道的時間和頻率擴展具有固有的穩健特性。采用數字技術有兩個方面的好處:首先,它允許采用糾錯編碼技術來提高傳輸的可靠性;第二,它允許對信道混響做一定的補償,包括時間和頻率上的補償,從而進一步保證了通信過程中的通信質量[8]。基于參量陣MFSK水聲通信系統框圖如圖4所示:
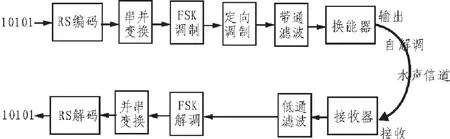
圖4 參量陣MFSK通信系統框圖
3.1參量陣聲源
基于參量陣的MFSK水聲通信將參量陣作為信號源向水介質用發出強烈調制的超聲波;超聲波在沿其傳播軸行進的過程中不斷通過非線性交互作用解調出差頻波fm信號;這些不斷解調出來的差頻波fm疊加起來,由此一個端射式虛擬聲源陣列(end-fire virtual array)通過這種方式實現了,這個虛擬聲源陣即所謂的參量聲學陣,該這陣列使得差頻波的能量在聲波前進方向上不斷得到加強。由于超聲波具有很強的指向性,傳播主軸方向以外這種疊加加強效應將會很微弱,而且其他方向傳播能量極易被水介質所吸收,這最終使得差頻波fm在主傳播軸方向具有很強的指向性[6]。
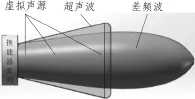
圖5 水聲參量陣信道示意圖
3.2MFSK信號的參量陣定向調制
與傳統水聲通信系統不同的是:數字信號x(n)經RS編碼、串并轉換得到調制信號fm之后,會將fm再進行一次定向算法調制并通過超聲波換能器發射。此時輸出信號表達式如下:

式(9)中,A為信號幅度,ω0是參量陣定向調制的載波頻率,fm是MFSK調制頻率,φ和η分別是調制波和載波的初始相位,T是信號幀周期時間。仿真設置信號載波頻率為40 kHz,T=100ms,時隙為50ms,其時域波形如圖6所示。
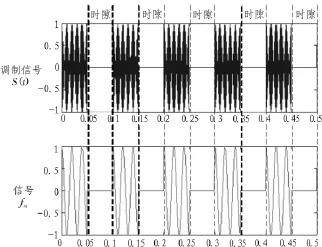
圖6 參量陣MFSK信號時域波形
在信道的非線性作用下,調制信號S(t)自解調產生信號fm,利用Westervelt等人提出的理論和公式,陳敏等人原有的理論基礎上提出了更具有一般性的遠場非線性聲壓的計算公式來獲得fm的聲壓[6],即公式(11):

4 水聲參量陣MFSK通信實驗
水聲參量陣的通信研究多限于文獻中的仿真,本課題組在2014年11月在昆明某研究所的室內試驗水池中進行了首次基于參量陣的MFSK通信試驗。
通信系統在基于FPGA的平臺上進行設計程序,并實現信號處理及調制。其中,定向調制載波信號為40 kHz;選用DSB算法進行調制;編碼時間10ms,時隙15ms,則信號幀周期為25ms;每個碼元攜帶n=4 bit信息;選用RS編碼技術進行數字編碼,通信速率為160 bps。
實際信道雖然是在體積較小的水池中進行,為了避免池壁對信號的反射,水池的六面均使用了消聲材料進行消音。在通信過程中,充分驗證了上述的一些理論和仿真。
下面是以某次實驗為例進行分析,聲源距離檢測點20m處的信號。實驗中接收到的信號幀如圖7所示,此時信號處于虛擬聲源范圍內,能夠同時檢測到原波S(t)和差頻波fm。
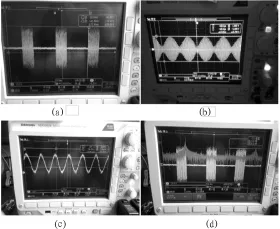
圖7 基于參量陣的MFSK水聲信號
圖7(a)是原波S(t),信號幀周期為25 ms,編碼時間為10 ms,時隙為15 ms;圖7(b)是編碼信號,基波頻率為 40 kHz;圖7(c)為通信過程中信道自解調產生的差頻波fm信號,頻率為2.5 kHz;圖7(d)為信號S(t)的頻譜。
4.1幀信號同步檢測驗證
多途效應是水聲通信中對信號傳輸影響最嚴重的,為此,在水池實驗過程中對參量陣所產生的多途信號進行了檢測。如圖8為水池中實時信號幀的音頻圖,從圖中基本可以排除多途信號的存在。說明了在參量陣水聲通信系統中,參量陣的高指向性能夠有效的抑制多途效應的產生。
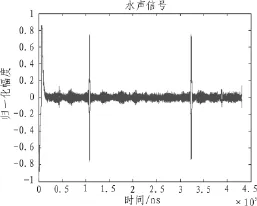
圖8 基于參量陣的歸一化MFSK水聲信號
4.2MFSK調制解調結果驗證
數字信號由MATALB生成并通過調制發送,在水聽器這段進行信號解調并對數據進行保存,后再經過MATLAB讀取并進行比較。最終的實驗結果顯示誤碼率均為0。
從上面的實驗結果可以看出,該系統在室內水池中能夠實現正確的通信,但是由于實驗環境限制,未能進一步驗證在自然水域環境中的誤碼率。
5 結 論
本文在對水聲參量的基礎理論上,結合水聲通信中的MFSK技術特點,提出了一種全新的通信方式:基于參量陣的MFSK通信系統。采用了參量陣的定向調制算法,實現了通信信號的定向傳輸,利用信道的非線性作用解調出差頻信號并解調出對應的數字信號。實驗表明,該通信方法能夠有效的抑制水聲通信中的多途效應,能夠在抗干擾能力上進一步提高水聲通信技術。
[1]覃杰莉.水聲通信系統多載波MFSK技術設計與實現[D].哈爾濱:哈爾濱工程大學,2009.
[2]李頌文.參量陣及其在水聲工程中的應用進展[J].聲學技術,2011,30(1):9-16.
[3]Westervelt P J.Parametric acoustic array[J].The Journal of the Acoustical Society of America,1963,35(4):535-537.
[4]Berktay H O.Possible exploitation of non-linear acoustics in underwater transmitting applications[J].Sound Vib,1965,2(4):435-461.
[5]Berktay HO,Leahy DJ.Far fieldperformance of parametric transmitters[J].J.Acoust.Soc.Am,1974,55(2): 539-546.
[6]陳敏.聲頻定向系統理論與關鍵技術研究[D].成都:電子科技大學,2008.
[7]陳乃鋒.MFSK水聲通信信號處理子系統的設計與實現[D].哈爾濱:哈爾濱工程大學,2010.
[8]馬雯,黃建國,張群飛.FDM與MFSK相結合的水聲遠程信息傳輸[J].數據采集與處理.2005,20(4):423-427.
【相關參考文獻鏈接】
郝雯.基于MSP430F169的水聲遙控發射系統設計[J].2014,22(5):141-143.
周瑩,于金花,牛志華,等.基于FPGA的水聲信號采集與存儲系統設計[J].2014,22(13):184-186.
韓沖,張效民,李通旭,等.一種新型水聲信號同步的DSP實現[J].2014,22(14):107-109.
盧俊宏,王英民,牛奕龍,等.復合水聲信號的光纖傳輸技術[J].2014,22(17):133-136.
鄭德龍,劉敏,張良紳.基于DSP和FPGA的水聲定位系統主控機設計[J].2014,22(19):164-166.
張斌,徐志京.基于壓縮感知的水聲數據高效傳輸及其仿真[J].2014,22(20):23-26.
彭華,高貂林.一種水聲信號的模擬研究和檢測[J].2014,22(21):42-44.
劉深.基于支持向量機的水聲信號多分類器設計[J].2014,22(21):59-62.
劉青,楊勇.基于嵌入式LINUX的智能車載終端系統的設計[J].2014,22(23):81-83.
The research of MFSK in the underwater acoustic communication based on parametric array
LIXing-yong,SONG Ye-qiang,LILun,CHEN Min
(School of Aeronautics and Astronautics University of Electronic Science and Technology of China,Chengdu 611731,China)
Introduces the theory and characteristic of parametric array and MFSK in the underwater acoustic communication. Water acoustic channel has a limited bandwidth,random time-varying,space-variable,frequency-dependent and signal's multi-path interference,these factors restrict the developmentof underwater acoustic communication technologies.In order to solve these problem above,We proposed a new way ofMFSK in the underwater acoustic communication,and themethod of modulation for the directional transmission based on parametric array,which can get signal demodulated by the parametric array's self-modulation under the channel's nonlinear interference.It proved by the simulation and experiment that:this high directionalway ofunderwateracoustic communication can resist the noise interference,inhibit themulti-path interference.The high qualityway ofunderwateracoustic communication hasa high value in the underwater communication.
parametric array;MFSK;underwater acoustic communication;nonlinear interference;multi-path interference
TN929.3
A
1674-6236(2016)19-0184-04
2015-10-26稿件編號:201510185
李興勇(1991—),男,重慶人,碩士。研究方向:水聲通信,海底探測,信號與信息處理。
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
鴨綠江(2021年35期)2021-04-19 12:24:18
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學物理·高中(2016年12期)2017-04-22 11:53:03
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30