空間激光通信一點對多點光學原理與方法的比較研究
2016-11-09 06:18:20張雅琳安巖姜會林王超江倫胡源董科研戰俊彤韓龍
兵工學報 2016年1期
張雅琳,安巖,2,姜會林,2,王超,2,江倫,2,胡源,董科研,戰俊彤,韓龍
(1.長春理工大學光電工程學院,吉林長春130022;2.長春理工大學空間光電技術研究所,吉林長春130022)
空間激光通信一點對多點光學原理與方法的比較研究
張雅琳1,安巖1,2,姜會林1,2,王超1,2,江倫1,2,胡源1,董科研1,戰俊彤1,韓龍1
(1.長春理工大學光電工程學院,吉林長春130022;2.長春理工大學空間光電技術研究所,吉林長春130022)
一點對多點的激光通信技術是構建天空地一體化信息網絡的關鍵節點,也是實現多衛星間組網鏈路通信的一個必要前提。將空間激光通信一點對多點光學原理與方法進行了比較和研究,并針對三同心球結構和旋轉拋物面結構,在其視場和能量利用率上面進行了分析。分析結果表明:三同心球結構視場可以達到水平和俯仰均為120°,旋轉拋物面結構的視場可以達到水平360°,俯仰100°;三同心球結構隨著視場的增大,能量利用率迅速下降;而在同等體積情況下,旋轉拋物面的能量利用率在80°范圍內比三同心球結構更高且更穩定。
光學;激光通信;一點對多點;光學原理
DOI:10.3969/j.issn.1000-1093.2016.01.024
0 引言
空間激光通信因其帶寬大、數據傳輸速率高、抗干擾保密性好等優點而登上歷史的舞臺。特別是在軍事領域,迫切需要將海量原始數據以高速率從偵察平臺直接傳輸或中繼傳輸至指控終端,而對于大容量、高速率通信技術的需求更是非常強烈。目前激光通信的發展趨勢為:一則寬,即帶寬越來越寬;二則廣,即多點通信組建信息網絡。隨著空間激光通信系統性能不斷提高,空間激光通信逐漸從當前的點對點單一模式,向中繼轉發和構建空間激光通信網絡方向快速發展[1-5]。激光通信組網技術是未來激光通信中重要的發展方向。國際上關于激光通信“一點對多點"(以下簡稱一對多)的研究主要有:日本關于激光與微波通信的組網研究,美國的TSAT組網,美國朗訊公司和Tearbeam公司分別提出一個關于一對多通信系統的專利。國內長春理工大學提出以旋轉拋物面結構以及三同心球結構。本文在通過對國內外通信組網的相關技術調研基礎上,對一對多光學原理及方法進行了系統的分類,主要包括原理簡捷型組網結構[6-7]、交換分發型組網結構[8-10]、射頻激光結合型組網結構、視場擴大型組網結構[11-13]和大視場通信型組網結構[14-16]。
1 空間激光通信一對多光學原理與方法
1.1 原理簡捷型組網結構
簡捷型空間激光通信組網具體可以分為兩種類型:一類為多光端機共基礎型,另一類是多分光鏡疊加型,由于其原理簡單,因此稱為原理簡捷型。
1.1.1 多光端機共基礎型
多光端機共基礎型是在單個光端機的基礎上發展而來,利用多個光端機組合,實現一對多的激光通信。每個光端機單元均由光學天線、APT系統、通信收發系統組成,其供電系統和環境適應性裝置等為共用部分,如圖1所示。
每個光端機分別負責對準各自的信號源,即兩個光端機的疊加實現了系統的“一對二"通信。然而,每臺光端機重量十分大,每多增加一路通信,重量多增加一倍,再加上共用的電子學通信收發系統的重量,總重就已經超過100 kg.由于重量和體積比較大,因此僅可以用于“一對二"或“一對三"中,可用于大平臺激光通信,如車載、船載激光通信等。
1.1.2 多分光鏡疊加型
多分光鏡疊加型只保留一個光端機,并在該光端機光學天線的前部增加多個不同角度的分光鏡,通過多個分光鏡不同角度的放置,如圖2所示,以實現不同方位的空間激光通信組網。
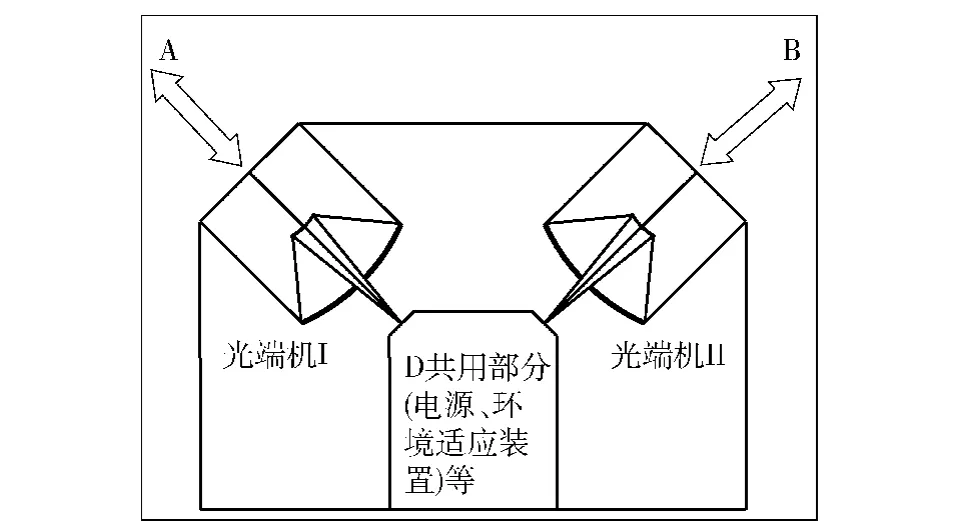
圖1 多光端機結構系統示意圖Fig.1 Schematic diagram of multiple optical transmitter and receiver
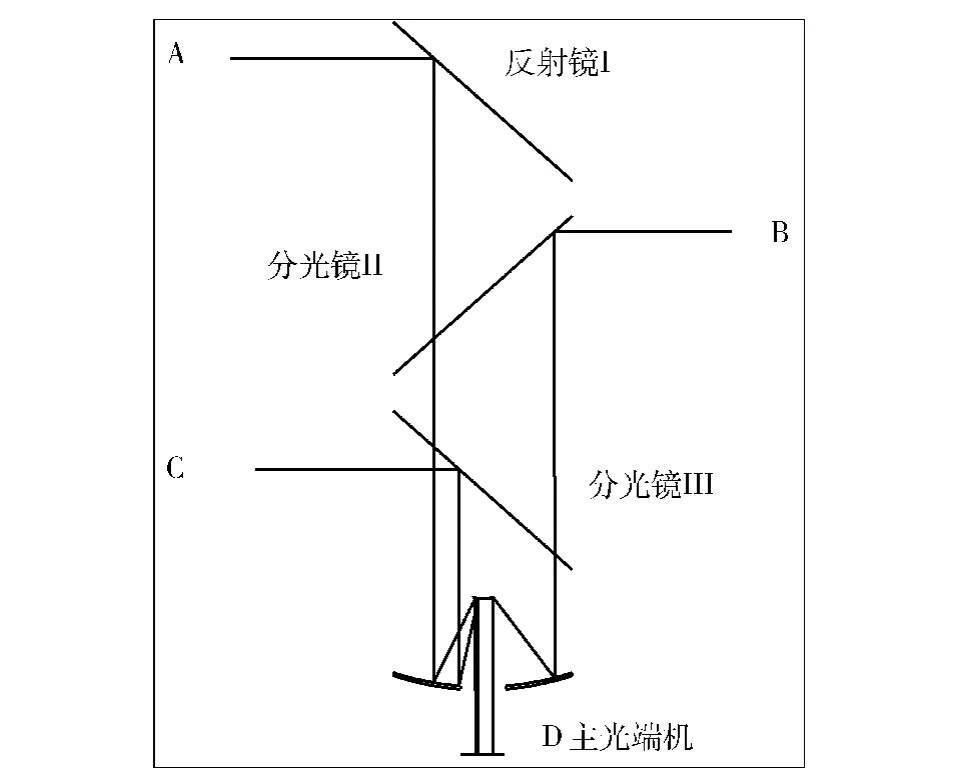
圖2 多分光鏡結構的系統示意圖Fig.2 Schematic diagram of multiple beamsplitter structure
其中,分光鏡代替了多光端機,每一個分光鏡都是“一對一"的。雖然多分光鏡結構的體積、重量相比于多光端機結構均有一定的下降,可使用的通信數量也有一定的增長,但也僅可以用到“一對三"或“一對四",數量再增加,能量的利用和分光鏡膜系的鍍制都是很難實現的。因此,多分光鏡結構可以用于大平臺的空間激光通信,但要在衛星上使用仍是十分困難的。
1.2 交換分發型組網結構
空間激光通信非實時方面,可以分為光交換結構和光分發結構,統稱為交換分發型。
1.2.1 光交換結構
光交換技術是利用動態路由和波長分配原則,通過光交叉連接器和光分差復用器,實現光路層面上多點的波長轉換通信,其本質上是光域內面向連接的電交換。它利用動態路由和波長分配原則,通過波長轉換,實現空閑波段的充分利用,避免了波長競爭問題,提高了通信波長的利用率,如圖3所示。光交換技術的優點主要有網絡可擴展,最優分配資源;其缺點主要是沒有捕獲、對準和跟蹤(APT)、靈活性差。
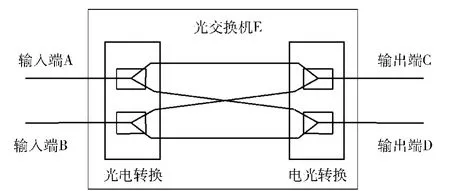
圖3 光交換結構基本單元示意圖Fig.3 Basic element of optical conversion structure
1.2.2 光分發結構
光分發技術是采用樹型、線型、星型或環型等結構實現主從終端之間的分時、分速率、分流量的多目標通信。如圖4所示。光分發技術的優點主要有網絡可擴展、時序性管理、可控制性好等;缺點主要有波長獨占等。光分發技術可實現組網鏈路中的非實時通信、“一對多"目標的場景通信。
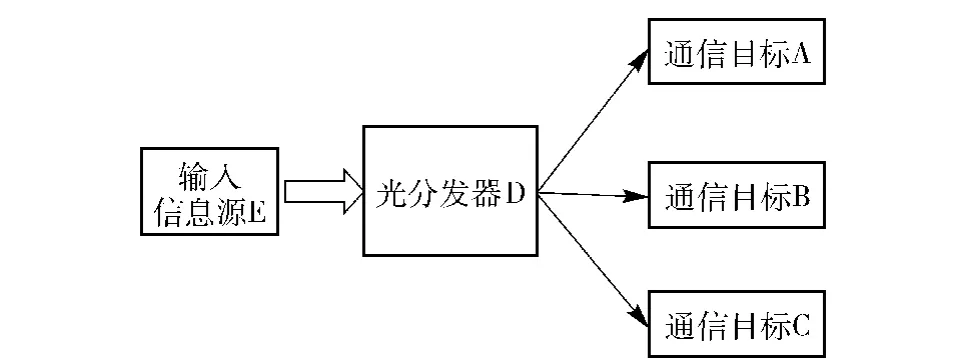
圖4 采用光分發方式的無線光通信網絡Fig.4 Schematic diagram of optical communication network with optical distribution
1.3 射頻激光結合型
射頻激光結合型是將射頻微波通信和空間激光通信集合起來,針對不同的通信條件和通信要求,采用相應的通信手段,實現各個領域內的無盲點通信。國際上多個國家已經將其列入研究計劃,主要代表是日本和美國。
1.3.1 雙層低軌道全球通信組網方案
日本關于激光與微波通信的組網研究中,提出了雙層低軌道全球通信組網方案,并具體論證了700 km和2 000 km兩套低空衛星系統的可行性。衛星間、衛星與地面站之間,采用上層衛星的空間激光通信進行信息傳輸;地面站與移動用戶(個人移動通信),采用下層衛星的微波通信。日本的雙層低軌道全球通信組網方案,雙低軌組合優勢互補、覆蓋范圍廣、激光和微波手段復合。但是雙軌道實施難度較大、結構實施復雜、沒有提出技術層面激光多點通信具體方案。
1.3.2 TSAT組網
美國的TSAT組網擬于2016年實施,其目的可以提供面向全球部隊提供高帶寬的信息通信能力。預計達到的通信速率為10~40 Gbit/s.美國的TSAT組網計劃,通信速率快、帶寬較高、覆蓋范圍大、各種通信手段互補。可用于星地通信、星星通信、星船通信等,可提供面向全球部隊提供高帶寬的信息通信能力。
1.4 視場擴大型
視場擴大型是基于傳統光端機視場而言,在反射式結構的基礎上,采用了大像面形式實現多點組網通信功能。主要代表結構有兩種,一種是光纖陣列結構,另一種是多發多收結構。
1.4.1 光纖陣列結構
美國朗訊公司提出了一種視場擴大型一對多組網結構的概念設計[13],如圖5所示。采用R-C望遠鏡結構形式,在焦平面處放置N×N的光纖陣列,每一個光纖放置在接收望遠鏡不同的焦面上,實現單個光學望遠鏡的一對多空間激光通信。這樣提供了更大的焦平面,并為發射器和接收器提供自動對準。
1.4.2 多發多收結構
美國Tearbeam公司提出一種自由空間一對多光通信系統[12],如圖6所示。當光輸入端240耦合到光源210時,光輸入端終端241直接指向光源經反射元件表面反射的光,指向反射元件表面的光260被反射到遠距離處的用戶端設備130,通過調節節點單元250的位置提供了一種追蹤移動遠距離的技術,并可同時利用光接收機520進行接收,從而實現“一對多"通信組網結構的設計。
視場擴大型中的光纖陣列結構視場雖有所擴大,但由于卡式系統的局限以及光纖數值孔徑的限制,視場仍然較小,雜散光較為嚴重,收發器件排布也較為困難。多發多收結構視場也有所擴大,但是視場擴大仍然有限,APT系統跟蹤也較難實現。這兩種是關于激光通信組網具體系統初步的構想,可用于小視場范圍內的空間激光組網通信,但在應用性和實施性上存在上述難點,有待于進一步去突破與改進。
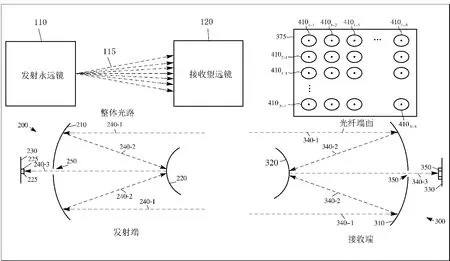
圖5 光纖陣列型結構Fig.5 Fiber-optic array structure

圖6 自由空間一對多激光通信示意圖Fig.6 Schematic diagram of free space multi-point laser communication
1.5 大視場通信型
大視場通信型包括三同心球結構和旋轉拋物面結構。由于二者均有比較大的視場,因此稱為大視場通信型。
1.5.1 三同心球結構
基于三同心球結構的透鏡式特種光學天線如圖7所示,該種天線形式的水平視場角和俯仰方向視場角可做到120°.
天線在系統跟蹤軌道像面相應的位置放置單元收發終端,可對多個目標進行通信接收及發射,當目標移出該分系統管轄的區域邊緣到達另一區域時,另一區域的分系統滑動至該處“接管"對通信目標的跟蹤和瞄準任務。
三同心球結構的裝置,省去了復雜的跟蹤瞄準的過程。該裝置為空間激光通信組網提供了一個簡單便捷的方法,可實現規定跟蹤像面軌道的多點空間激光通信。三同心球結構結構簡單,體積質量輕小型化,適用于短距離,要求靈活機動的激光網絡。
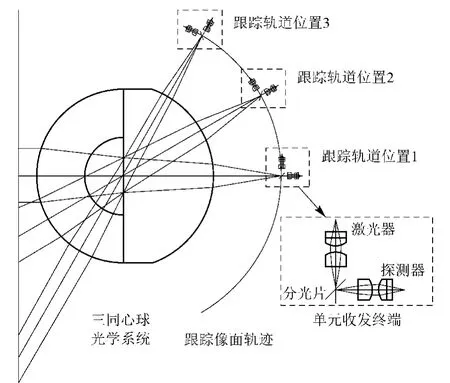
圖7 三同心球結構示意圖Fig.7 Three-concentric sphere structure
1.5.2 旋轉拋物面結構
另一種特種天線結構是旋轉拋物面結構,是以反射式旋轉拋物面為基礎面型。如圖8所示,通信目標A和通信目標B分別從兩個不同的方向指向拋物線曲面焦點入射到特種光學天線上,反射光線平行于旋轉拋物面軸線出射,進入后續的子光路中。這種反射式旋轉拋物面可以實現水平通信范圍360°,俯仰通信范圍可以實現100°的通信范圍。

圖8 旋轉拋物面一對多激光通信光學系統簡圖Fig.8 Schematic diagram of multi-point laser communication system with rotating paraboloid structure
旋轉拋物面結構的方案通信范圍廣,結構簡單,可利用口徑和能量均比三同心球結構大,通信距離較遠,也可以實現多點雙工同時通信。可用于飛機、飛艇和衛星平臺間激光通信組網,實現“一對多"目標的同時激光通信。
2 比較分析
交換分發型和射頻激光結合型均屬于通信網絡層面。而原理簡捷型、視場擴大型和大視場通信型均屬于通信物理層面上,由于原理簡捷型屬于全口徑接收,而視場擴大型屬于概念型設計,因此本節均不做討論。本節主要針對大視場通信型重點分析在視場與能量利用率上面的差異。
2.1 視場分析
三同心球系統屬于大視場光學系統,對于大視場光學系統,邊緣點的光照度為:E'm≈E'Acos4ω,當視場角很大時,邊緣光照度降低相當嚴重。當視場增大到ω=60°的時候,光照度已經下降到歸一化的0.06了,能量損失嚴重。邊緣能量低是限制三同心球視場的一個因素,另一個因素是由于三同心球系統的像面限制了其視場的大小。根據實際應用,使三同心球系統的視場做到約為2ω=120°,由于三同心球子午面與弧矢面完全對稱,因此三同心球方位角與俯仰角均為120°.
對于旋轉拋物面系統,設拋物線方程為χ2= 4py,p為拋物線方程系數,則其視場即通信范圍如圖9所示。
通信范圍為

當拋物線方程χ2=4py中p確定時,χ0、χ1為兩個定量,可根據上式求出旋轉拋物面系統的通信范圍角,如圖10所示。
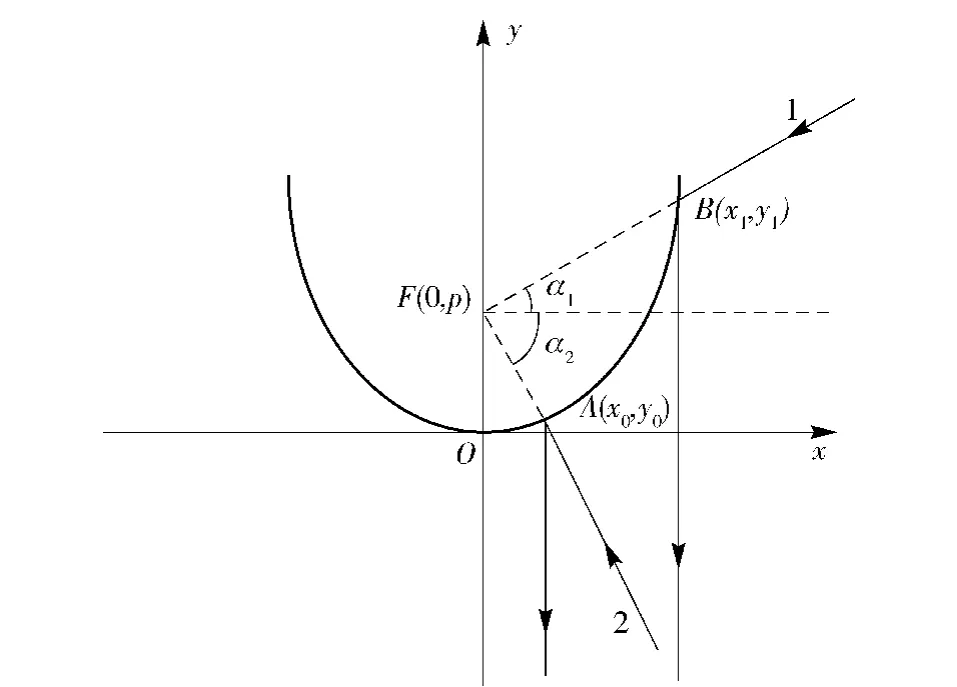
圖9 拋物面通信范圍示意圖Fig.9 The communication range of paraboloid
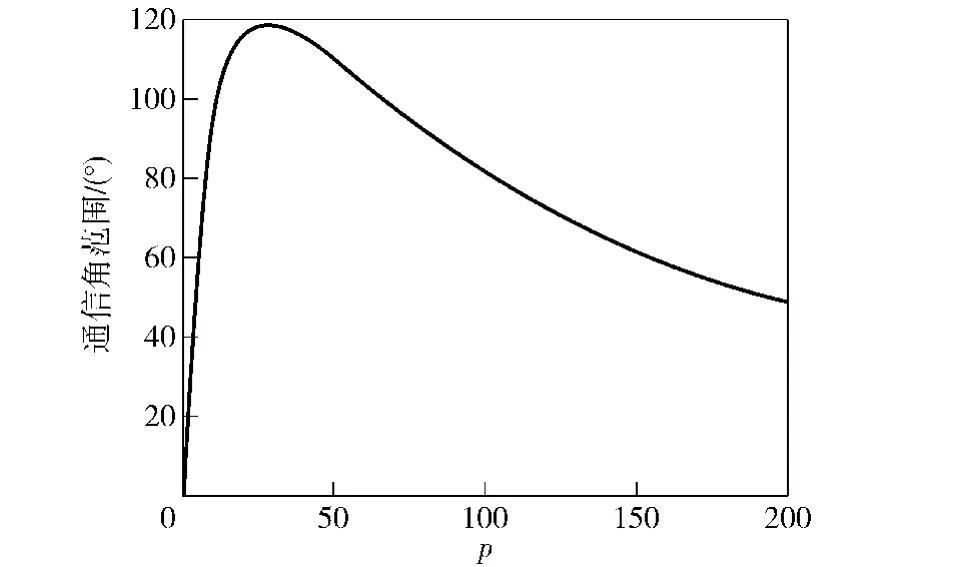
圖10 通信角度隨p值變化曲線Fig.10 The relationship between communication range and paraboloid coefficient
從圖10中可以看出,最大通信角度約為120°,此時p=27.40.根據實際應用,若p值取為較為合理的值,通信范圍約為100°左右。因此對于旋轉拋物面系統,其通信范圍其俯仰方向可以達到100°左右。由于旋轉拋物面系統為旋轉對稱系統,因此方位角可以到達360°.
三同心球系統的視場相對于旋轉拋物面系統而言,顯得略微有些局限。但如果所需視場不需要過大的情況下,三同心球結構的簡捷就會很占優勢。旋轉拋物面系統的方位角360°是三同心球所不能相比的,但俯仰角卻要小一點。
2.2 能量利用率分析
對于三同心球系統,是由3個同心的球面組成的光學系統,孔徑光闌位于球心處。如下,系統光闌口徑40 mm,視場160°,光學體積為200 mm×360 mm× 200 mm(與后者旋轉拋物面型的體積大小相對一致)。不同視場下的光束口徑遮攔是影響通信質量的最大因素,可用漸暈系數表征其影響程度。對不同視場下入射光束口徑的直徑進行采樣。如表1所示。
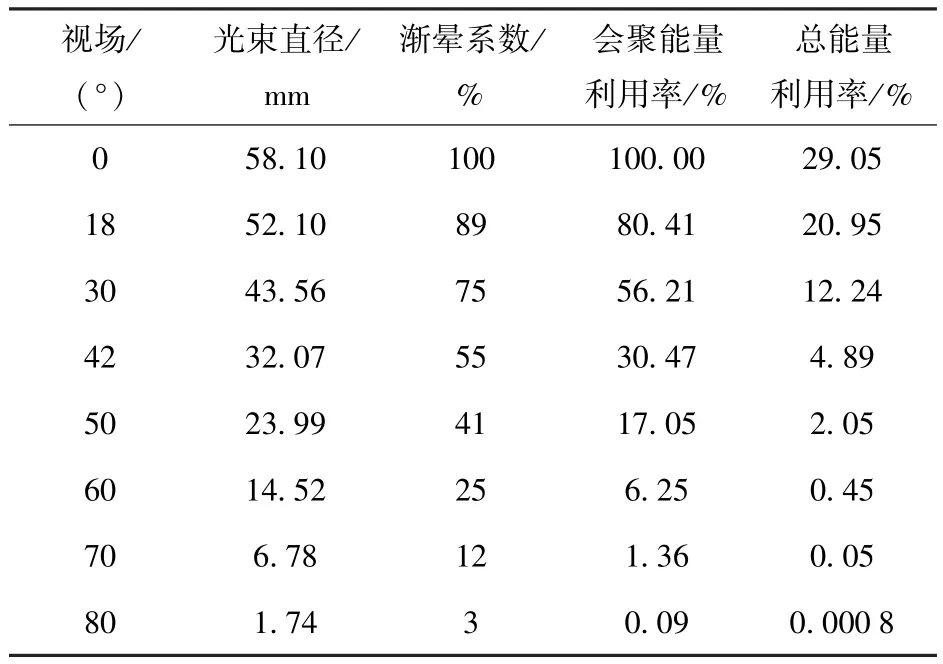
表1 三同心球系統能量率用率Tab.1 Energy efficiency of three-concentric sphere structure
表1中,漸暈系數為子午截面光束寬度與軸向中心光束寬度之比。會聚能量利用率與總能量利用率可由下式得出:
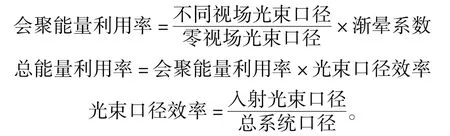
隨著視場角的增大,軸外視場的光束口徑越來越小,能量利用率越來越低,以至于邊緣視場能量利用率非常低。對于旋轉拋物面系統,能量利用率的主要影響來自于組成拋物面結構的單個反射鏡有效口徑。不同視場下對應的有效光束口徑面積會不同,視場范圍的有效光束口徑效率為單片反射鏡投影面積Sm與天線總面積Sa的比值,即
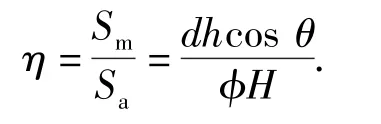
在下面實例中,光學天線的口徑為φ=200 mm,高度H=200 mm,分m=2層,每層n=9塊反射鏡,則每塊反射鏡的寬度為d=πφ/n、高度為h=H/m.代入到上式中可以得出:η=πcos θ/nm.由于反射鏡的投影角度不可以成90°或0°,因此設反射鏡的投影角度變化范圍為10°~80°.其中,由于使用的是反射鏡,表面的吸收忽略不計,因此會聚能量利用率約為100%.同時,采用兩個反射鏡面聯合同時對一顆衛星通信的體制,相鄰多反射鏡協助的方法,即相鄰兩個反射鏡的入射轉角相同,入射到后續子光路的光束口徑會增大一倍,能量相應增大一倍,能量利用率的計算結果如表2。
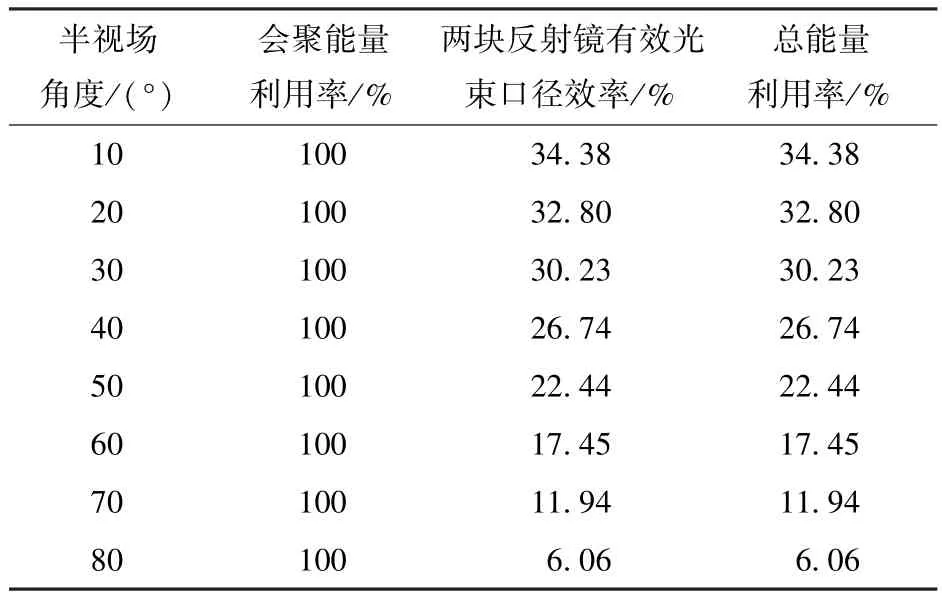
表2 旋轉拋物面結構能量利用率Tab.2 Energy efficiency of rotating paraboloid structure
總能量利用率=會聚能量利用率×光束口徑效率。
可見,相比于同等體積大小的三同心球結構,旋轉拋物面的能量利用率更高。在俯仰80°范圍內能量利用率都保持在30%左右,雖然能量利用率仍然不高,但是比前者要穩定許多。然而旋轉拋物面結構的天線對于APT控制難度非常大,針對這一點,三同心球結構就更勝一籌。
綜上所述,三同心球系統在水平方向和俯仰方向的視場可以達到120°左右,但隨著視場的增大,能量利用率迅速下降,邊緣視場能量利用率較低;旋轉拋物面結構的水平視場可以達到360°,俯仰方向100°,相比于三同心球系統,能量利用率更加穩定,而且在同等體積下可以獲得更大的接收能量。然而旋轉拋物面結構的能量利用率卻沒有達到一個峰值,因此提高能量利用率仍然是一個重要的問題。二者對比如表3所示。
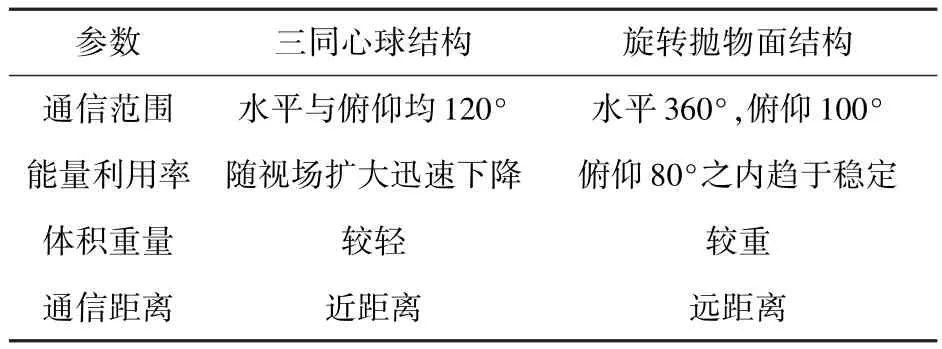
表3 三同心球結構與旋轉拋物面結構比較Tab.3 Differences between three-concentric sphere structure and rotating paraboloid structure
3 總結
本文介紹了目前國內外激光通信“一對多"現狀及發展現狀,并按不同原理進行了分類,主要包括原理簡捷型、交換分發型、射頻激光結合型、視場擴大型和大視場通信型。其中重點分析了三同心球結構與旋轉拋物面結構的視場及能量利用率。分析結果表明:三同心球結構可以達到水平俯仰均120°左右,但是大視場情況下的有效光束口徑變小,能量利用率迅速減小;旋轉拋物面結構的水平視場可以達到360°,俯仰方向100°,并且在俯仰方向80°之內能量利用率趨于穩定。然而雖然旋轉拋物面結構利用率穩定,但是利用率沒有達到最高值,且需要復雜的APT系統,而三同心球系統則不需要復雜的APT系統,在像面位置進行定標,便可以實現多光端機系統的跟蹤和捕獲。本文中的不同光學系統有各自的優勢,為空間激光“一對多"通信原理提供了設計基礎理論。
References)
[1]陳晶,艾勇,譚瑩,等.小衛星編隊光通信系統設計[J].無線光通信,2007(6):41-43.CHEN Jing,AI Yong,TAN Ying,et al.Optical communication system design of formation flying micro-satellites[J]Optical Communication Technology,2007(6):41-43.(in Chinese)
[2]吳國強,孫兆偉,趙丹,等.編隊小衛星星間通信系統的發展和趨勢[J].哈爾濱工業大學學報,2007,39(11):1699-1703.WU Guo-qiang,SUN Zhao-wei,ZHAO Dan,et al.Development and research of intersatellite communication system on formation small satellites[J].Journal of Harbin Institute of Technology,2007,39(11):1699-1703.(in Chinese)
[3]李勇軍,趙尚弘,張冬梅,等.空間編隊衛星平臺激光通信鏈路組網技術[J].無線光通信,2006(10):47-49.LI Yong-jun,ZHAO Shang-hong,ZHANG Dong-mei,et al.Technology of space laser communication link formation satellite platform networking[J].OpticalCommunicationTechno-logy,2006(10):47-49.(in Chinese)
[4]胡鶴飛,劉元安.高速空間激光通信系統在空天信息網中的應用[J].應用光學,2011,32(6):1270-1274,1290.HU He-fei,LIU Yuan-an.Application of high data-rate space laser communication system in aerospace information networks[J].Journal of Applied Optics,2011,32(6):1270-1274,1290.(in Chinese)
[5]劉宏展,孫建峰,劉立人.空間激光通信技術發展趨勢分析[J].無線光通信,2010,34(8):39-42.LIU Hong-zhan,SUN Jian-feng,LIU Li-ren.Analyzing the trends of space laser communication[J].Optical Communication Technology,2010,34(8):39-42.(in Chinese)
[6]姜會林,胡源,宋延嵩,等.空間激光通信組網光端機技術研究[J].航天返回與遙感,2011,32(5):52-59.JIANG Hui-lin,HU Yuan,SONG Yan-song,et al.Research on space laser communication network[J].Spacecraft Recovery& Remote Sensing,2011,32(5):52-59.(in Chinese)
[7]鄭陽,付躍剛,胡源,等.基于空間激光通信組網四反射鏡動態對準研究[J].中國激光,2014,41(1):97-103.ZHENG Yang,Fu Yue-gang,Hu Yuan,et al.Research on fourmirror dynamic alignment based on space laser communication link networks[J].Chinese Journal of Lasers,2014,41(1):97-103.(in Chinese)
[8]周俊.光通信交換技術發展趨勢及標準現狀[J].信息技術與標準化,2008(4):27-30.ZHOU Jun.Development trend of optical communication switching and its standardization[J].Information Technology&Standardization,2008(4):27-30.(in Chinese)
[9]張連俊,彭榮群.通信網的光交換技術[J].山東工程學院學報,2001,15(4): ZHANG Lian-jun,PENG Rong-qun.Communication network optical switching technology[J].Journal of Shandong Institute of Technology,2001,15(4):.
[10]蔡然.無線光網絡若干關鍵技術研究[D].成都:電子科技大學,2008.CAI Ran.Research on some key technologies of wireless optical communication for networking[D].Chengdu:University of Electronic Science and Technology,2008.(in Chinese)
[11]王志堅,王鵬.大視場同心球面攝影裝置:中國,200720094643.2[P].2007-11-22.WANG Zhi-jian,WANG Peng.Wide field of view concentric spherical imaging equipment:CN,200720094643.2[P].2007-11-22.(in Chinese)
[12]Sparrold S W,Okorogu Bothell W A.Free space point-to-multipointoptical communication system and apparatus:US,6912360B1[P].2005-06-28.
[13]Presby H M,Tyson J A.Point-to-multipoint free-space wireless optical communication system:US,6445496B1[P].2002-09-03.
[14]姜會林,胡源,丁瑩,等.空間激光通信組網光學原理研究[J].光學學報,2012,32(10):48-52.JIANG Hui-lin,HU Yuan,DING Ying,et al.Optical principle research of space laser communication network[J].Acta Optica Sinica,2012,32(10):48-52.(in Chinese)
[15]姜會林,趙義武,付強,等.一種基于多元組合旋轉拋物面面型結構的一點對多點激光通信裝置:中國,201010199217.1[P].2010-06-12.JIANG Hui-lin,ZHAO Yi-wu,FU Qiang,et al.Based on multivariate combination ratating parabolic surface type structure of point to multi-point laser communication device:CN,201010199217.1[P].2010-06-12.(in Chinese)
[16]王炫名,趙義武.空間激光通信用大視場同心球面裝置:中國,201418004682.4[P].2010-06-12.WANG Xuan-ming,ZHAO Yi-wu.Space laser communication with a large field of view concentric spherical device:CN,201418004682.4[P].2010-06-12.(in Chinese)
A Comparative Research on Optical Principles and Methods of One-point-to-multi-point Space Laser Communication
ZHANG Ya-lin1,AN Yan1,2,JIANG Hui-lin1,2,WANG Chao1,2,JIANG Lun1,2,HU Yuan1,DONG Ke-yan1,ZHAN Jun-tong1,HAN Long1
(1.School of Opto-Electronic Engineering,Changchun University of Science and Technology,Changchun 130022,Jilin,China; 2.Space Opto-Electronic Technology Institute,Changchun University of Science and Technology,Changchun 130022,Jilin,China)
One-point-to-multi-point laser communication is the key to establish an integrated spaceground information network system,and also is the necessary prerequisite of realizing the inter-satellite communication link.The optical principles and methods of one-point-to-multi-point laser communication are comparied and researched.The fields of view and energy efficiencies of three-concentric sphere structure and rotating parabolic structure are analyzed.The result shows that the horizontal and vertical fields of view of the three-concentric sphere structure are 120°,and the horizontal and vertical fields of view of the rotating parabolic structure are 360°and 100°,respectively.With the increase in the field of view,the energy efficiency of three-concentric sphere structure decreases rapidly.However,the energy efficiency of the rotating parabolic structure is more stable than that of the three-concentric sphere structure in the range of 80°.
optics;laser communication;one-point-to-multi-point;optical principle
TN929.1
A
1000-1093(2016)01-0165-07
2015-03-03
國家自然科學基金項目(91338116);兵器預先研究支撐基金項目(62201070152);長春市科技局計劃項目(14DR003)
張雅琳(1987—),女,博士研究生。E-mail:yalinjs@163.com;安巖(1986—),男,講師,博士。E-mail:anyan_7@163.com;姜會林(1945—),男,教授,博士生導師。E-mail:hljiang@cust.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
