MEMS陀螺旋轉導航誤差的分析與仿真
2016-11-09 09:43:40周瓊峰康國華陳雪芬
中國空間科學技術 2016年4期
周瓊峰,康國華,*,陳雪芬
1.南京航空航天大學 航天學院,南京 210016 2.南京航空航天大學 自動化學院,南京 210016
?
MEMS陀螺旋轉導航誤差的分析與仿真
周瓊峰1,康國華1,*,陳雪芬2
1.南京航空航天大學 航天學院,南京 210016 2.南京航空航天大學 自動化學院,南京 210016
目前基于高精度陀螺導航的旋轉調制技術研究及應用已相當成熟,為實現低成本、低精度微機電系統(Microelectromechanical Systems,MEMS)陀螺的高精度應用,文章引入旋轉調制技術。對旋轉調制前后導航誤差進行了理論分析和仿真,對比了相同條件下對不同精度陀螺的調制效果,分析了影響陀螺誤差調制的因素。仿真結果表明,相同條件下低精度MEMS陀螺的旋轉調制效果比高精度陀螺更加明顯,在100 s內導航誤差降低了30%以上。另外,對旋轉導航誤差的分析表明,研制高精度旋轉調制轉臺是提高MEMS陀螺旋轉調制精度的關鍵技術。
旋轉調制;MEMS陀螺;調制轉臺;導航誤差;調制速率誤差
近年來,慣性導航系統發展迅速,以其獨特的優點在航空、航天和航海等領域應用十分廣泛,尤其是大量高科技戰術武器,很大程度上體現了國家武器裝備現代化的程度[1-3]。但目前使用的高精度慣性導航系統往往成本高,體積大,無法滿足現代需求,所以為實現中精度、低成本的慣性導航系統,擴大其應用領域,引入了微型微機電系統(Microelectromechanical Systems,MEMS)技術和旋轉調制技術。
MEMS慣性傳感器是采用MEMS技術研制的陀螺和加速率計,其特點是體積小、成本低、抗振動沖擊能力強、可靠性高,非常適用于構建低成本、微型捷聯慣性導航系統。但目前的MEMS慣性傳感器精度較低,誤差隨時間積累較大,大大降低了導航系統的精度;而旋轉調制技術是一種全自主誤差補償方法,引入該技術能夠有效地抑制MEMS慣導器件的常值誤差,從而在使用低成本、低精度的微型MEMS慣導器件的同時提高其導航系統的精度。但目前旋轉調制技術大部分是針對高精度陀螺,如光纖陀螺、激光陀螺等,較少有對MEMS等低精度陀螺的應用。文獻[4]詳細描述了慣性技術、導航技術領域內前沿研究機構研究慣性導航(MEMS-INS)的路線,總結了微型導航技術系統算法的研究現狀,對MEMS-INS的發展進行展望,指出MEMS-INS的發展方向。文獻[5]針對MEMS慣性器件低信噪比和漂移大的問題,提出了基于慣性測量單元(IMU)轉動的MEMS器件誤差旋轉自補償方法。將MEMS的輸出信息利用小波降噪技術進行預處理,以此消除旋轉調制方案不能自補償的隨機噪聲信號并提高器件輸出信噪比,試驗表明,采用旋轉狀態下的MEMS慣導系統可有效地提高系統自身測姿和定位精度。文獻[6]為了實現中精度、低成本的航姿參考系統,提出了一種基于低精度MEMS陀螺旋轉調制技術的解決方案,研究了陀螺的刻度系數誤差以及比例敏感漂移在旋轉調制下的特性,分析了旋轉調制技術可能引入的新誤差,針對各種不同的誤差源,給出了相應的誤差補償方法及補償結果。
本文通過對現有文獻[7-18]的調研,從理論上分析并仿真驗證了旋轉調制系統速率誤差等因素對導航誤差的影響,提出了提高旋轉式MEMS陀螺精度的關鍵技術,并通過對比分析不同精度陀螺的旋轉調制效果,驗證了技術的有效性。
1 旋轉調制原理
首先給出旋轉調制導航系統常用的坐標系。
1)導航系(OXnYnZn):選取當地地理坐標系作為導航系。
2)機體系(OXbYbZb):與載體固連的坐標系,OXb為俯仰軸,OYb為橫滾軸,OZb為方位軸。
3)IMU系(OXsYsZs):各軸指向慣性器件敏感軸方向,陀螺和角速率計的測量值為IMU系中的角速率和角加速率。
旋轉調制技術是指在慣性導航系統中加入轉動機構和測角裝置,通過轉動機構旋轉調制將導航誤差調制成三角波信號,在求解導航參數的計算過程中通過數學積分運算使得誤差得到抵消和補償,從而提高導航精度。
設MEMS陀螺儀東向、北向和天向漂移誤差分別為εbx、εby、εbz,MEMS組件繞天向軸方向以角速率ω勻速旋轉。
若載體坐標系與導航坐標系重合,則得到以下坐標轉換矩陣
(1)
得到t時刻后MEMS陀螺的漂移誤差調制為
(2)
設IMU轉動一個短周期τ,對式(2)進行積分運算:
(3)
由此可以看出,通過IMU繞天向軸的單軸旋轉調制,可以消除MEMS慣性敏感軸與旋轉軸垂直的漂移誤差,從而減小這部分漂移誤差對導航系統精度的影響;但沿著旋轉軸方向上的陀螺儀和加速率計的常值漂移仍按著原有的規律傳播。
理想情況下,轉位機構不存在角速度和角位置誤差,相對于慣性系載體坐標系下的角速度可以表示為

(4)
(5)
設角位置誤差為小量,則由轉位機構誤差引起的角速度誤差為
(6)
由式(6)可以看出,轉位機構角速度誤差產生的影響等效于陀螺常值漂移誤差。
2 仿真分析
采用單軸單向連續旋轉的調制方案對不同精度MEMS陀螺的旋轉調制效果以及旋轉速率對調制效果的影響程度進行仿真分析。
仿真條件:設初始航跡位置經度、緯度、高度分別為110°、20°、500 m,初始橫滾角、俯仰角、航向角分別為0°、0°、90°,機體的初始速率為0 m/s,用捷聯組合導航算法對旋轉調制前后的捷聯飛行位置軌跡及誤差進行仿真,仿真步長為0.02 s,仿真模型包括機體航跡發生器、IMU輸出、IMU誤差模擬、GPS/SINS(捷聯慣導系統)組合導航系統、卡爾曼濾波等。
2.1不同精度陀螺旋轉調制效果
設旋轉調制系統角速率為10(°)/s(假設不存在旋轉速率誤差),仿真時間為100 s,經過旋轉調制,MIMU導航系統俯仰軸姿態誤差與高精度陀螺和中低精度的MEMS陀螺單軸零偏的關系如表1所示,輸入量為陀螺零漂,仿真輸出量為橫滾角誤差。

表1 仿真時間為100 s的橫滾角誤差
1)從表1可以看出,單軸陀螺零漂越大,即陀螺精度越低,產生的導航姿態角誤差越大,這與陀螺零漂引起的誤差方程[2]描述一致。
2)從表1的誤差減小量看,對于較低精度的陀螺,即零漂在10(°)/h左右,旋轉調制效果最明顯。
3)零漂小于0.01的陀螺旋轉調制效果較差,對比零漂較大的陀螺,根據陀螺的各項隨機誤差效應對導航誤差的影響分析,其原因在于:零漂遠遠大于其他隨機誤差時,陀螺的漂移誤差可近似等于常值零漂,零漂越大,產生的導航誤差越大,旋轉調制的效果越明顯;零漂較小,與隨機誤差數量級相近,零漂產生的導航誤差較小,陀螺隨機誤差引起的誤差不可忽略,旋轉調制的效果對隨機誤差的調制效果較差。
2.2旋轉調制效果的影響因素
2.1節是在仿真時間和旋轉調制速率一定的條件下,分析陀螺本身零漂對旋轉調制效果的影響,但由文獻[1]可知旋轉調制的時間、旋轉速率以及不同的旋轉調制方法都會影響旋轉調制效果,表2和表3給出了仿真時間為1 000 s時15(°)/s和6(°)/s旋轉速率兩種調制方式下的調制結果,其中陀螺零漂為0.01(°)/h。
從表2可以看出,在調制速率、調制時間相同的情況下,相比于100 s的調制時間,經過1 000 s的旋轉調制后,各項導航誤差都有很大的改善,尤其是姿態誤差,精度提高了一個數量級;而對于單向連續旋轉和正反連續旋轉,對速率誤差和位置誤差的調制效果相當,但正反連續旋轉對姿態誤差的調制效果更好。
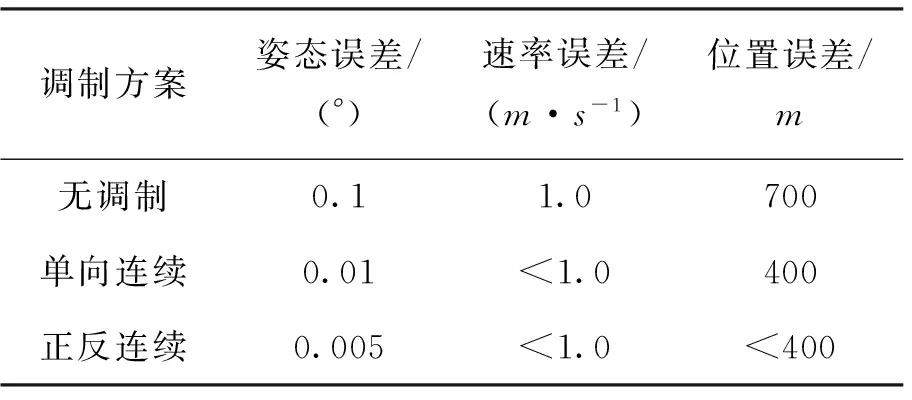
表2 仿真時間為1 000 s、旋轉速度為15(°)/s的導航誤差
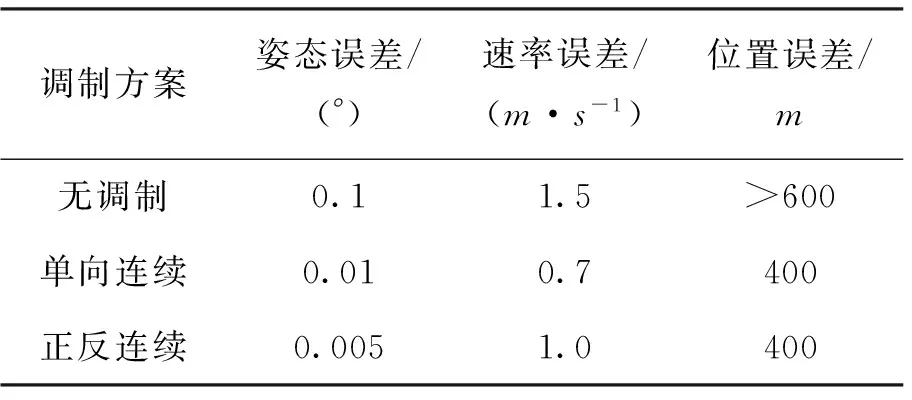
表3 仿真時間為1 000 s、旋轉速度為6(°)/s的導航誤差
表3結果顯示,單向連續旋轉與正反連續旋轉對誤差調制的效果和表2的結果一致,但在6(°)/s的轉速調制下,旋轉調制對速率誤差的調制效果比15(°)/s的調制效果好。
綜上所述,對于零漂為0.01(°)/h的陀螺分析可知,旋轉調制的時間越長,誤差調制效果越好;不同的旋轉調制方案對各項導航誤差調制效果不同;旋轉調制速率對旋轉效果有一定程度的影響。
2.3旋轉速率對不同陀螺的調制影響
旋轉調制速率w的變化范圍為5~15(°)/s,以1(°)/s遞增,對不同常值零漂的陀螺進行導航誤差分析,結果如圖1~圖5所示。
由圖1~圖5可得到:
1)相比于高精度陀螺,旋轉速率對低精度陀螺的調制效果影響較大;
2)對于姿態角誤差,旋轉速率對橫滾角誤差調制效果影響較大,且旋轉速率在8~10(°)/s范圍內平均角誤差相對較小;
3)對于速度誤差和位置誤差,y軸方向上的誤差對旋轉調制速率比較敏感,所以要根據陀螺精度等實際情況選取合適的旋轉速率范圍。
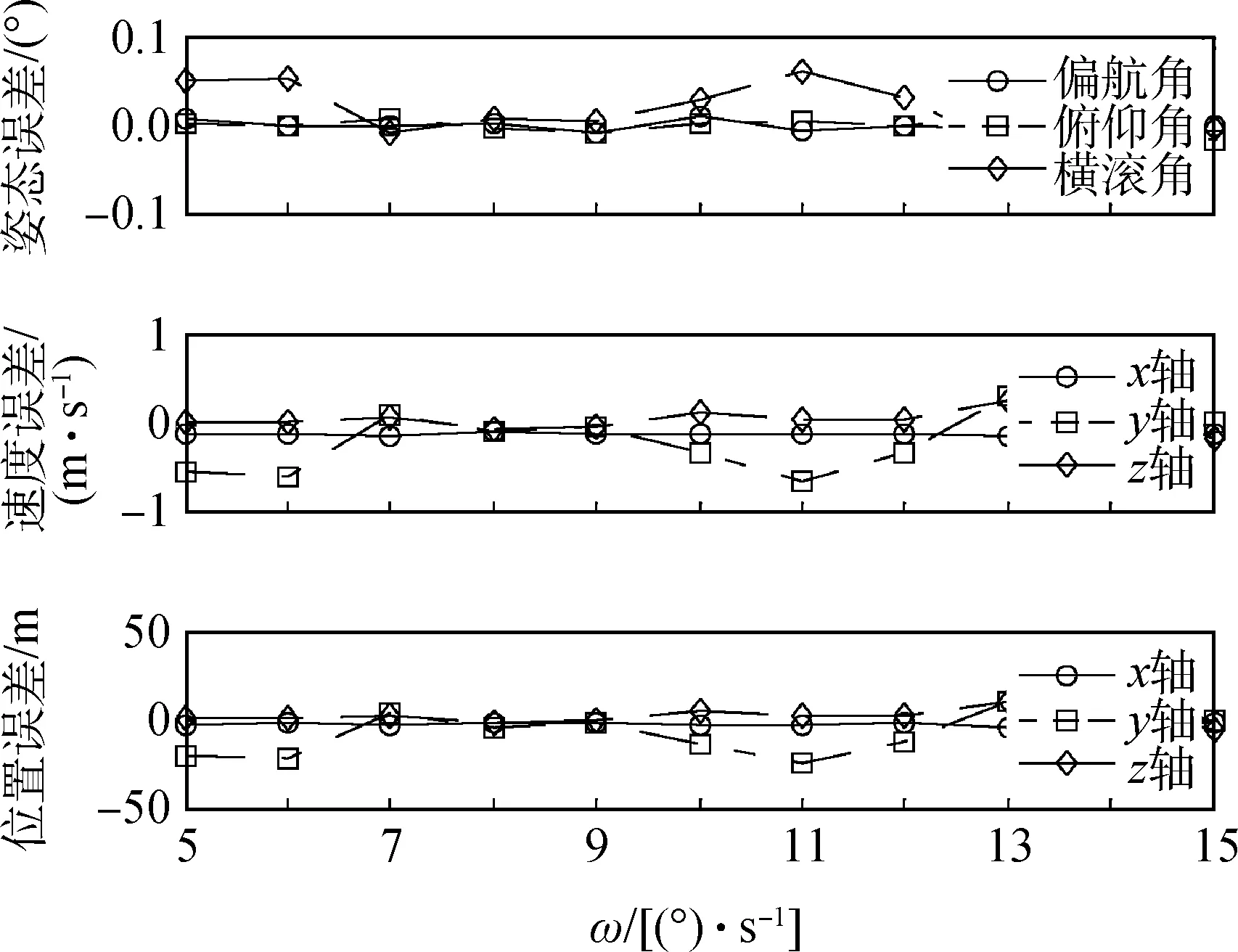
圖1 陀螺零漂為0.001(°)/h的導航誤差Fig.1 Navigation error for 0.001(°)/h gyro drift
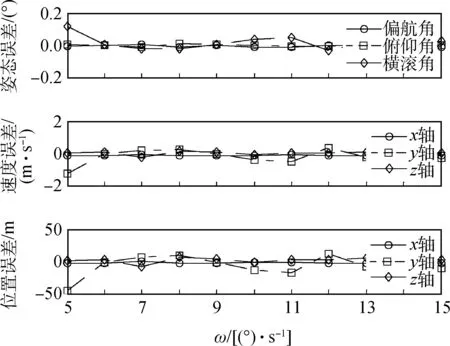
圖2 陀螺零漂為0.01(°)/h的導航誤差Fig.2 Navigation error for 0. 01(°)/h gyro drift

圖3 陀螺零漂為0.1(°)/h的導航誤差Fig.3 Navigation error for 0.1(°)/h gyro drift
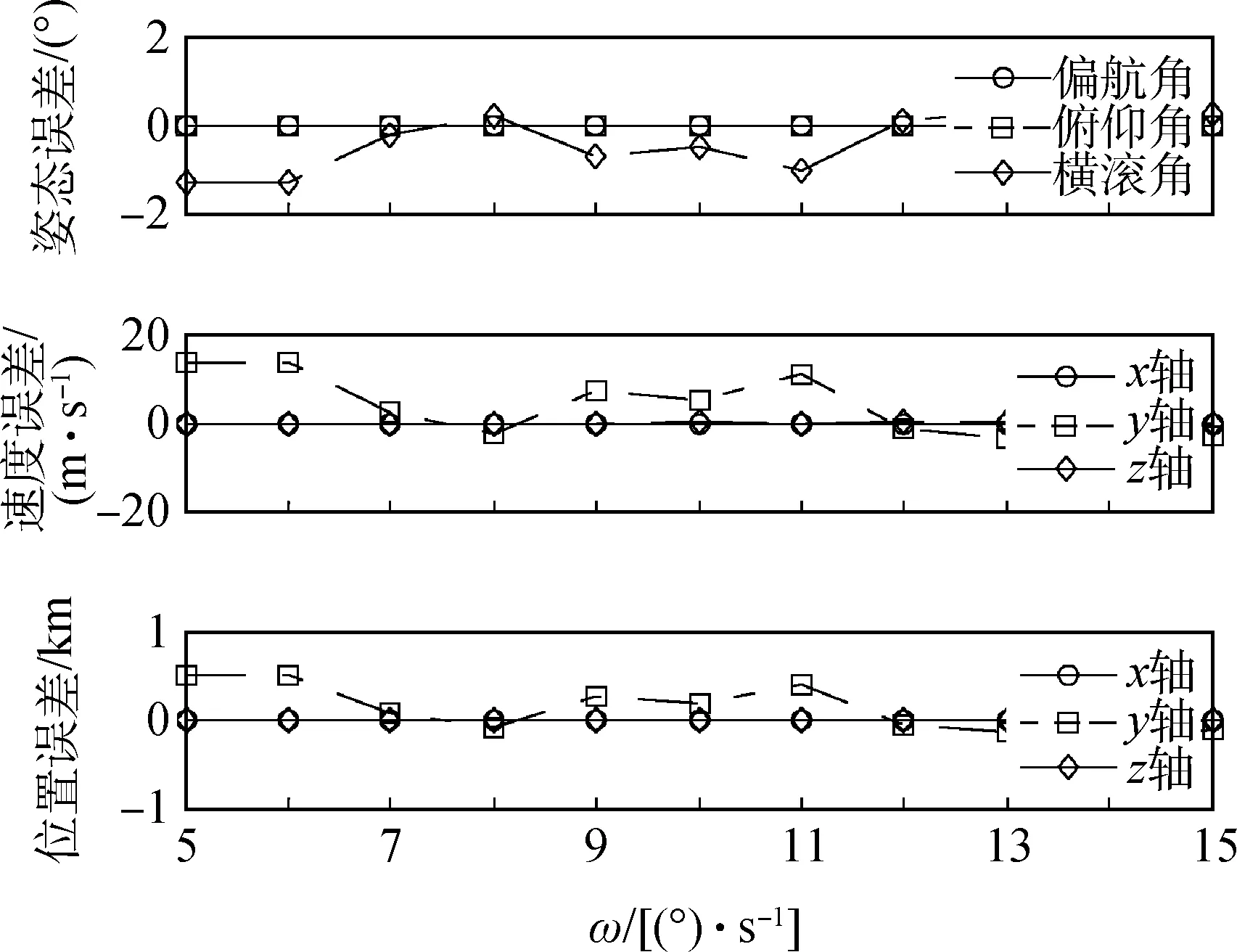
圖4 陀螺零漂為1(°)/h的導航誤差Fig.4 Navigation error for 1(°)/h gyro drift
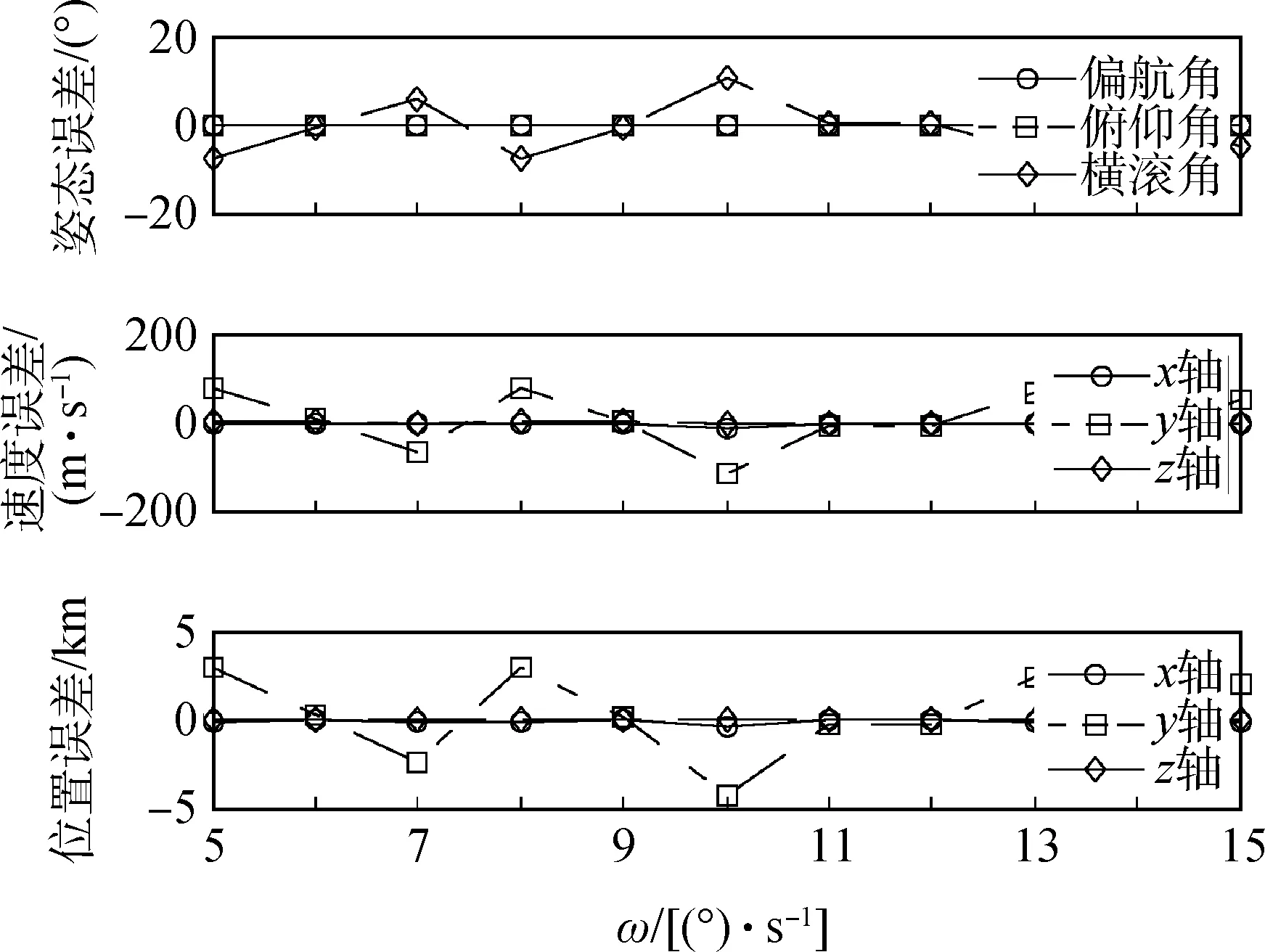
圖5 陀螺零漂為10(°)/h的導航誤差Fig.5 Navigation error for 10(°)/h gyro drift
2.4旋轉速率誤差對誤差調制的影響
采用低精度的MIMU,其陀螺零漂為10(°)/h,旋轉速率設為15(°)/s,仿真不同速率誤差引起的導航誤差大小,時間為100s,結果如表4所示。
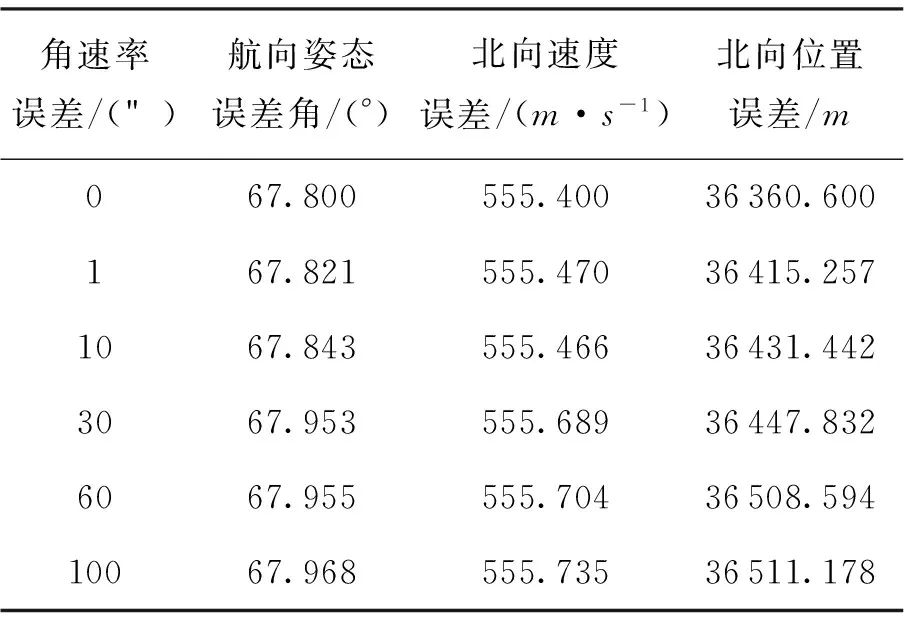
表4 速率誤差引起的100 s內的導航誤差
由表4可知,對于10(°)/h的陀螺,旋轉速率誤差會引入新的導航誤差,轉位機構存在恒定的角速率誤差,等效于存在相應的方位常值陀螺漂移。根據表4的數據,得到以下速率誤差與導航誤差的擬合曲線,從擬合曲線可以看出航向姿態角誤差、北向速度誤差和北向位置誤差與旋轉機構的角速率誤差成線性關系,可以對旋轉機構角速率精度的選擇提供參考。
角速率誤差與航向姿態誤差角:
y=0.001 7x+67.834
角速率誤差與北向速度誤差:
y=0.003 2x+555.47
角速率誤差與北向位置誤差:
y=1.295 1x+36 402
綜上所述,角速率誤差對旋轉調制的影響不可忽略,所以對于低精度陀螺的旋轉調制,要控制轉位機構的角速率誤差,即對轉位機構的精度由很大的要求。
3 結束語
本文通過對旋轉調制前后導航誤差的仿真,對比相同條件不同精度下陀螺的調制效果,分析了影響陀螺誤差調制的因素。
1)精度高的陀螺旋轉調制提高精度有限,精度低的效果明顯,尤其是MIMU,能更好地利用旋轉調制技術,同時突出自身低成本、小型化的優點,可用于研制中精度、低成本的慣導系統。
2)影響旋轉誤差調制效果的因素主要有:陀螺零漂、旋轉方式、旋轉角速率以及調制時間,陀螺的精度越低,旋轉角速率對調制的影響越大;對于低精度的MIMU,更多考慮旋轉調制角速率的誤差帶來的影響,對基于MIMU的旋轉調制系統,應該選擇高精度的轉臺,即角速率的誤差要控制在一定范圍內。
3)若轉位機構存在恒定的角速率誤差,會引入新的導航誤差,所以調制低精度的MEMS陀螺,關鍵技術在于研制高精度的轉位機構,從而提高受調制導航系統的精度。
References)
[1]齊廣峰, 呂軍鋒. MEMS慣性技術的發展及應用[J]. 電子設計工程, 2015(1): 87-89.
QI G F, LV J F. The development and application of MEMS inertial technology[J]. Electronic Design Engineering, 2015(1): 87-89 (in Chinese).
[2]丁楓, 馮麗爽, 晁代宏, 等. 轉臺安裝誤差對捷聯慣導標定的影響分析[J]. 彈箭與制導學報, 2013, 33(1): 19-24.
DING F, FENG L S, CHAO D H, et al.The influence of turntable fixing errors on optical gyro strapdown inertial system calibration[J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2013, 33(1): 19-24 (in Chinese).
[3]李榮冰, 劉建業, 曾慶化, 等. 基于MEMS技術的微型慣性導航系統的發展現狀[J]. 中國慣性技術學報, 2004, 12(6): 90-96.
LI R B, LIU J Y, ZENG Q H, et al. Present development situation on micro inertial navigation system based on MEMS technology[J]. Journal of Chinese Inertial Technology, 2004, 12(6): 90-96 (in Chinese).
[4]楊建業, 蔚國強, 汪立新, 等. 捷聯慣性導航系統旋轉調制技術研究[J]. 電光與控制, 2009, 16(12): 30-33.
YANG J Y, WEI G Q, WANG L X, et al. Research on rotating modulation technology of strapdown inertial navigation system[J]. Electronics Optics and Control, 2009, 16(12): 30-33 (in Chinese).
[5]孫偉, 初婧, 丁偉, 等. 基于IMU旋轉的MEMS器件誤差調制技術研究[J]. 電子測量與儀器學報, 2015(2): 240-246.
SUN W, CHU J, DING W, et al. Research on rotary MEMS device error modulation technology based on IMU[J]. Journal of Electronic Measurement and Instrument, 2015(2): 240-246 (in Chinese).
[6]徐燁烽, 仇海濤, 何孟珂, 等. MEMS旋轉調制式航姿參考系統設計及誤差補償[J]. 兵工學報, 2011, 32(6): 691-696.
XU Y F, CHOU H T, HE M K, et al. MEMS rotation modulation navigation position reference system design and error compensation[J]. Acta Armamentarii Journal of China Ordnance, 2011, 32(6): 691-696 (in Chinese) .
[7]王學運, 呂妍紅, 王瑋, 等. MEMS器件捷聯慣導系統旋轉調制技術[J]. 東北大學學報(自然科學版), 2014, 35(4): 494-498.
WANG X Y, LV Y H, WANG W, et al. Rotating modulation technology of strapdown inertial navigation system on MEMS devices[J]. Journal of northeastern university (Natural Science), 2014, 35(4): 494-498 (in Chinese).
[8]柴永利. 捷聯慣導系統誤差調制技術研究[D]. 哈爾濱:哈爾濱工程大學, 2010.
CHAI Y L. Research on error modulation technology of the strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2010 (in Chinese).
[9]姜朋. 基于MEMS-IMU的捷聯式導航系統技術與實現研究[D]. 哈爾濱:哈爾濱工程大學, 2012.
JIANG P. Research of strapdown navigation system technology and implementation based on MEMS IMU[D]. Harbin: Harbin Engineering University, 2012 (in Chinese).
[10]李國強. 旋轉捷聯慣導系統技術研究[D]. 哈爾濱:哈爾濱工程大學, 2011.
LI G Q. Research on rotary navigation system technology[D]. Harbin: Harbin Engineering University, 2011 (in Chinese).
[11]王庭軍. 旋轉式捷聯慣導系統關鍵技術研究[D]. 哈爾濱:哈爾濱工程大學, 2013.
WANG T J. Research on the key technology of rotary strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2013 (in Chinese).
[12]毛玉良. 激光陀螺導航系統誤差辨識與修正技術研究[D]. 北京:北京理工大學, 2014.
MAO Y L. Research on laser gyro navigation system error identification and correction technology[D]. Beijing : Beijing Institute of Technology, 2014 (in Chinese).
[13]王鑫哲. 光纖陀螺捷聯旋轉式慣導系統關鍵技術研究[D]. 哈爾濱:哈爾濱工程大學, 2011.
WANG X Z. Research on fiber optic gyro strapdown rotary inertial navigation system is the key technology[D]. Harbin: Harbin Engineering University, 2011(in Chinese).
[14]張鵬. 激光陀螺捷聯慣導系統旋轉調制技術研究[D]. 哈爾濱:哈爾濱工業大學, 2010.
ZHANG P. Research on laser gyro navigation system rotating modulation technology[D]. Harbin: Harbin Institute of Technology, 2010(in Chinese).
[15]于瑩瑩. 單軸旋轉式捷聯慣導系統誤差調制技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2013.
YU Y Y. Research on error modulation technology of single shaft rotary strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2013 (in Chinese).
[16]YANG Y, MIAO L J. Fiber-optic strapdown inertial system with sensing cluster continuous rotation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004,40(4): 1173-1177.
[17]ISHIBASHI S, TSUKIOKA S, YOSHIDA H. Accuracy improvement of an inertial navigation system brought about by the rotational motion[C]∥OCEANS 2007-Europe,Aberdeen, 18-21 June, 2007, IEEE: 1-5.
[18]TITTERTON D H, WESTON J L. Strapdown inertial navigation technology[M]. 2nd ed. Reston: AIAA, 2004: 242-344.
(車曉玲、范真真)
收稿日期:2015-09-01;修回日期:2016-03-14;錄用日期:2016-05-11;網絡出版時間:2016-07-1213:26:47
網絡出版地址:http:∥www.cnki.net/kcms/detail/11.1859.V.20160712.1326.005.html
基金項目:高分辨率對地觀測系統重大專項
*通訊作者:李文然(1983—),男,碩士研究生,工程師,liwenran@wti.ac.cn,主要研究方向為遙感測控技術和智能交通技術
引用格式:李文然. 空間低溫制冷控制器的緩啟動電路建模分析[J].中國空間科學技術, 2016, 36(4):81-87.LIWR.
Modelinganalysisofsoft-startcircuitsofspacecoolingcontroller, 2016,36(4):81-87(inChinese).
Analysis and simulation on MEMS gyro rotary navigation error
ZHOU Qiongfeng1,KANG Guohua1,*,CHEN Xuefen2
1.College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2.College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
Currently, the research and application has been quite mature on rotating modulation technology of navigation based on high precision gyroscope. The rotating modulation technology was introduced to realize high precision application of the low precision MEMS gyroscope. According to the theoretical analysis and simulation of navigation error with rotating modulation or not, the effects on different precision gyroscope were compared under the same condition. As well, the factors that influenced the modulation result was analyzed in detail. It turns out that, compared to high precision gyroscope, the rotation modulation effect of low precision MEMS gyroscope is more obvious in the same condition, and more than 30% navigation error is reduced in the 100s due to rotation. In addition, developing high precision rotating modulation turntable is also one of the key technologies of improving the accuracy of the MEMS gyroscope rotation modulation.
rotating modulation;MEMS gyroscope;modulation turntable;navigation error;modulation rate error
10.16708/j.cnki.1000-758X.2016.0039
2015-11-26;
2015-12-30;錄用日期:2016-05-11;
時間:2016-07-1213:26:58
http:∥www.cnki.net/kcms/detail/11.1859.V.20160712.1326.008.html
江蘇省自然科學基金(SBK201343261)
周瓊峰(1993—),女,碩士研究生,zhouqf0819@163.com
康國華(1978—),男,教授,kanggh@nuaa.edu.cn,主要研究方向為衛星總體設計與姿態控制
V448.2
A
http:∥zgkj.cast.cn
引用格式:周瓊峰, 康國華, 陳雪芬.MEMS陀螺旋轉導航誤差的分析與仿真[J].中國空間科學技術, 2016, 36(4):74-80.
ZHOUQF,KANGGH,CHENXF.AnalysisandsimulationonMEMSgyrorotarynavigationerror[J].ChineseSpaceScienceandTechnology, 2016, 36(4):74-80.(inChinese).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年8期)2016-10-09 02:11:50