水下機器人深度控制研究
2016-11-07 22:00:04袁彬魏國亮董團陽
軟件導刊 2016年9期
袁彬++魏國亮++董團陽


摘要:實現PID控制器在水下機器人中的應用。提出水下機器人六自由度空間運動模型;借助SIMULINK平臺,設計PID控制器對水下機器人深度控制進行仿真;將控制算法寫入實際控制系統中,并在仿真控制參數的基礎上微調,實現水下機器人深度控制。
關鍵詞:水下機器人;PID控制器;SIMULINK
DOIDOI:10.11907/rjdk.161638
中圖分類號:TP319
文獻標識碼:A文章編號文章編號:16727800(2016)009012502
作者簡介作者簡介:袁彬(1990-),男,河北石家莊人,上海理工大學光電信息與計算機工程學院碩士研究生,研究方向為水下機器人姿態控制;魏國亮(1973-),男,上海人,上海理工大學光電信息與計算機工程學院教授,研究方向為水下機器人姿態控制算法;董團陽(1991-),男,陜西西安人,上海理工大學光電信息與計算機工程學院碩士研究生,研究方向為水下機器人操作系統。
0引言
海洋中蘊含著豐富的資源,如石油、天然氣、各種稀有金屬等。據估計,海洋中的資源儲藏量是陸地的幾十到幾百倍。海洋資源的開發和利用對人類未來的生存與發展具有十分重要的意義。水下機器人由于機動靈活,能夠在深海中長時間工作而日益成為人類開發利用海洋資源的重要工具。因此,水下機器人的研究具有重要價值。
從水下機器人與水面支持設備(母船或平臺)間聯系方式的不同,可以將水下機器人分為兩大類:一類是有纜水下機器人,習慣上稱為水下遙控運載體(Remotely Operated Vehicle),簡稱ROV。ROV是由母船通過電纜向其提供動力和進行遙控;另一類是無纜水下機器人,稱為水下自主式無人運載體(Automatic Underwater Vehicle),簡稱AUV。AUV自帶能源,依靠自身控制完成任務。有纜機器人都是遙控式,按其運動方式分為拖曳式、(海底)移動式和浮游(自航)式3種。而無纜水下機器人只能是自治式的,按規劃的航線執行任務。ROV研究將是未來水下機器人行業的發展方向。
水下機器人的運動控制是其完成指定任務的前提和保障,是水下機器人的關鍵技術之一。本文提出便于直接進行控制和仿真的六自由度通用模型。以水下機器人深度控制為研究目標,設計PID控制器。首先,在SIMULINK仿真[1,2]環境下對水下機器人深度控制進行模擬仿真,然后將控制算法應用到實際系統中實現水下機器人深度控制。
1水下機器人的數學模型
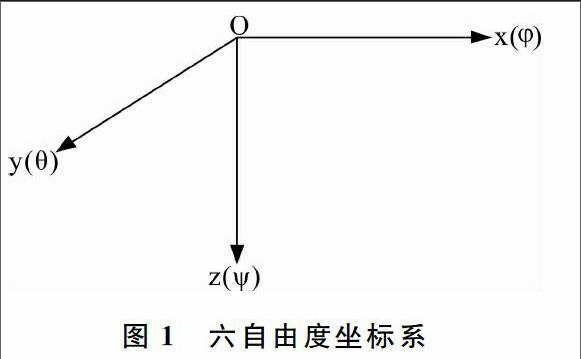
任何運動數學模型都是基于一定的坐標系,首先確定水下機器人運動的坐標系。本文采用國際水池會議(ITTC)推薦的體系。坐標系分為機體坐標系和運動坐標系,兩種坐標系之間通過歐拉公式進行轉換。為了分析水下機器人的六自由度運動,考慮使用方便,將艇體重心與坐標系的原點重合。六自由度坐標系[3]如圖1所示。
根據水下機器人的運動學模型,圖1為水下機器人的六自由度運動坐標系,其中X軸為艇艏方向、Y軸為橫軸、Z軸為垂直軸、繞X軸轉動的橫滾角φ、繞Y軸轉動的俯仰角θ、繞Z軸轉動的偏航角ψ。 符號表示如表1所示。
定義基于機體坐標系的六自由度擴展坐標為:
η=xyzφθψT(1)
定義基于地理坐標系的六自由度擴展坐標為: