基于北斗定位的兩棲機器人監測系統設計與實現
2016-11-07 05:36:57吳子岳高亢高亞東王董測
全球定位系統 2016年4期
吳子岳,高亢,高亞東,王董測
(上海海洋大學工程學院,上海 201306)
?
基于北斗定位的兩棲機器人監測系統設計與實現
吳子岳,高亢,高亞東,王董測
(上海海洋大學工程學院,上海 201306)
本文介紹了一種用于遠程測量繪制河流地圖的兩棲機器人,通過搭載大功率WIFI模塊可以遠距離遙控機器人圍繞河岸線在水中行駛。同時通過北斗模塊采集實時定位信息后使用短報文傳輸服務傳輸到遠程服務器,遠程服務器接收后自動根據定位信息繪制河流地圖。實驗表明,該系統能準確測量和繪制河流地圖,并且定位信息誤差達到米級,對于地圖繪制系統的更新具有重大意義。
河流測繪;兩棲機器;北斗模塊;短報文傳輸
0 引 言
由于自然變化或者人為原因,河流形狀每隔一定周期都會產生變化,因此需要定期在地圖系統中更新河流信息。在地圖上更新河流信息傳統的測量繪制方法是通過人工圍繞各河流走一圈繪制大體河流形狀,然后把圖形更新到系統中。這種方法測量操作起來十分不便,往往耗費大量人力和時間資源,同時由于個人因素人工繪制的河流圖形也不準確[1-3]。為了解決這個問題,本文設計了一款可以遠程遙控其行走測量河流地圖數據的基于北斗系統的河流繪制兩棲機器人,通過Android手機或者平板連接上機器人所發射的大范圍WIFI網絡后,使用專門的Android APP接收機器人回傳實時視頻數據,并控制機器人圍繞河岸行駛,行駛過程中機器人通過北斗模塊采集實時定位信息使用短報文遠程發送到服務器繪制準確的河流地圖。
1 機器人系統組成
基于北斗系統的河流繪制兩棲機器人系統組成如圖1所示,首先通過鋰電池電源結合電源管理模塊給整套硬件系統提供電源。Android系統終端設備通過WIFI模塊連接上兩棲機器人向外部發射的遠距離WIFI網絡,WIFI模塊運行Linux系統驅動USB攝像頭采集實時視頻流數據壓縮回傳到Android系統終端設備的遙控APP中。Android系統終端設備通過實時現場視頻向單片機最小系統傳達控制命令,單片機識別控制命令通過電機驅動模塊控制直流電機運轉[4],從而遠程遙控兩棲機器人圍繞河岸在水中或者陸地行走。兩棲機器人在整個圍繞河岸行駛的過程中,北斗模塊中定位模塊將實時經緯度數據傳輸給單片機系統,單片機系統處理后再通過北斗模塊的短報文服務發送到遠程監測服務器,最后遠程監測服務器根據兩棲機器人的定位數據繪制準確的河流地圖。

圖1 兩棲機器人系統硬件組成
2 系統硬件設計
2.1兩棲機器人結構設計
穩定的行進結構是兩棲機器人行走的基本保障,本文借鑒了行星齒輪的原理和動蹼明輪的工作機制[5],并結合了船舶設計的相關理論,將兩棲機器人動蹼明輪和行星齒輪有機結合起來,并以船的結構特點使其實現了水面運動的功能,從而實現水陸兩棲環境的運動功能[6]。兩棲機器人的行走機構如圖2所示。
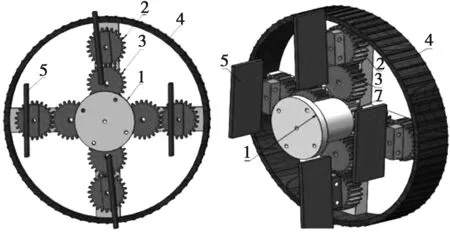
圖2 兩棲機器人行走機構
2.2實時WIFI傳輸電路設計
WIFI模塊運行Linux系統,通過mjpg-streamer視頻服務器程序驅動與其連接的USB攝像頭采集實時視頻流數據,并進行壓縮后通過Http協議向Android系統終端設備運行的遙控APP回傳實時視頻數據[7]。同時WIFI模塊中Linux系統運行TCP服務器,Android APP通過建立TCP客戶端向WIFI模塊傳達的機器人控制指令通過WIFI模塊的串口透明的傳輸到單片機。因此WIFI模塊的實際電路設計中需要將USB攝像頭與WIFI模塊通過USB進行連接,將WIFI模塊的TXD和RXD串行數據接口接到單片機中的串行數據接口,同時完成與Android APP和單片機之間的通信,Wifi傳輸電路圖如圖3所示。
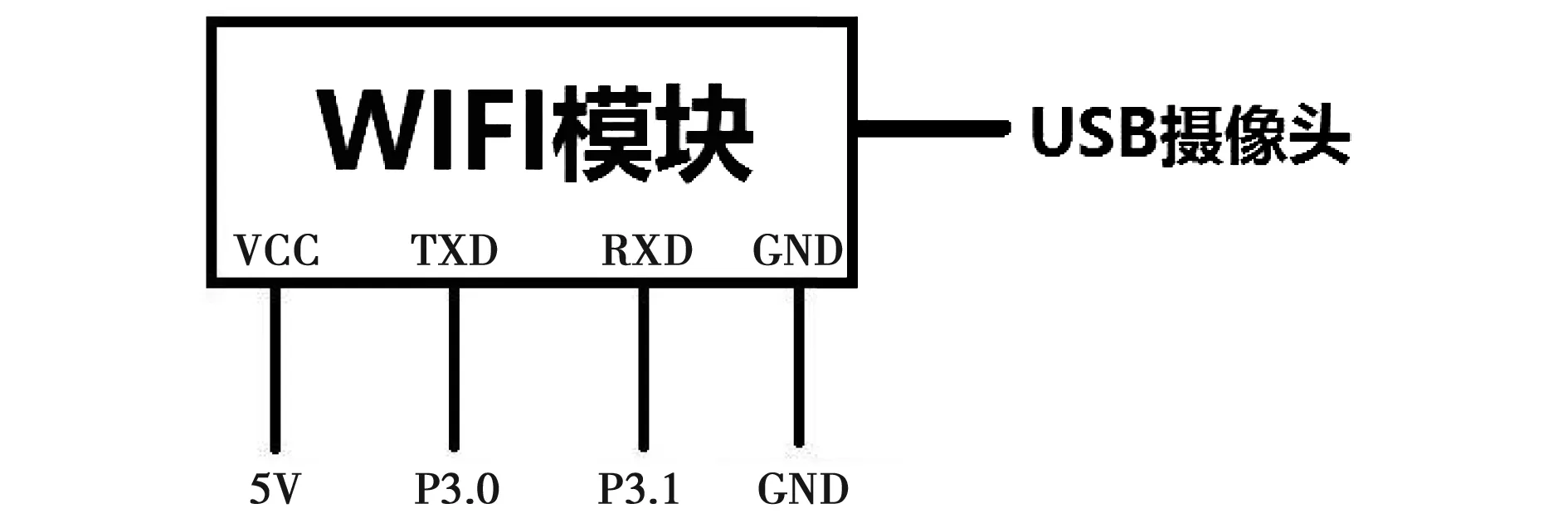
圖3 Wifi傳輸電路設計
2.3北斗模塊電路設計
北斗模塊在基于北斗系統的河流繪制兩棲機器人監測系統中起著關鍵性作用,實現了經緯度定位數據獲取以及短報文的遠程傳輸,具體通過單片機對其進行驅動從而實現不同功能需求[8]。本文選用的北斗模塊型號為VK2217M3M5,核心芯片為MT3333.VK2217M3M5北斗模塊采用低功耗設計,并且熱啟動時間僅需1 s,定位精度在2.5 m內,能準確采集兩棲機器人的實時經緯度數據。VK2217M3M5北斗模塊與單片機之間的通信和WIFI模塊相同,均是使用串行通信的方式。由于WIFI模塊占用了單片機的串口1,因此VK2217M3M5北斗模塊與單片機連接為串口2,具體電路如圖4所示。
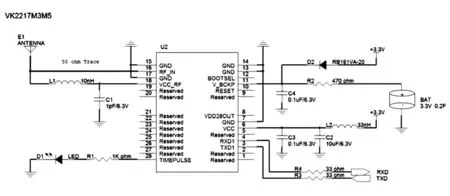
圖4 北斗模塊電路圖
3 系統軟件設計
3.1單片機下位機軟件設計
基于北斗系統的河流繪制兩棲機器人中單片機下位機軟件主要完成Android APP控制命令解析以及機器人行駛控制,定位數據采集以及短報文傳輸,下位機軟件流程如圖5所示。單片機上電后首先完成整個系統的初始化操作,其中初始化包括WIFI模塊的初始化和北斗模塊的初始化,兩者均是串口初始。由于WIFI模塊和北斗模塊的通信波特率均是9 600 bps,因此串口初始化中將單片機的串口1和串口2初始化成9 600 bps的通信波特率,并且單片機的兩個串口數據位與停止位等參數都按WIFI模塊與北斗模塊進行設置。
初始化完成后檢測Android APP是否連接,如果已連接則通過單片機的串口2驅動北斗模塊啟動定位服務獲取當前機器人所在位置的經緯度定位數據,獲取成功后同樣通過串口2驅動北斗模塊啟動短報文傳輸服務向遠程服務器發送經緯度定位數據。因此,任何時刻機器人的經緯度數據都沒有經過WIFI模塊傳輸至Android APP中。完成機器人定位數據的采集以及傳輸后判斷是否有Android APP傳達過來的機器人控制命令,如有則通過電機驅動模塊驅動直流電機運轉,從而使機器人按Android APP控制命令朝特定方向行駛。響應操作完成后重新返回主循環的第一步采集定位數據上傳開始下一輪循環[9]。
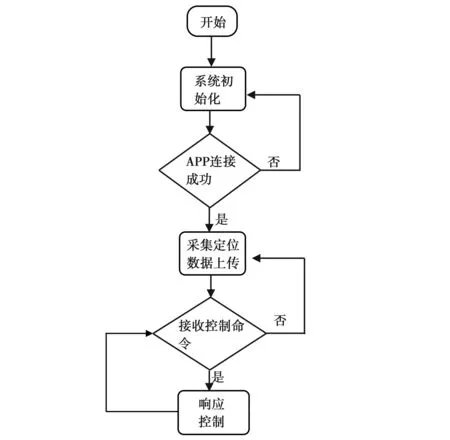
圖5 下機位軟件流程圖
3.2Android APP上位機軟件設計
基于北斗系統的河流繪制兩棲機器人中Android AP上位機軟件主要完成機器人中攝像頭采集到的實時視頻回傳的顯示以及遙控機器人在水中行駛,上位機軟件流程如圖6所示。
Android APP運行后首先連接機器人發射的WIFI網絡,然后建立專門的TCP客戶端再次連接WIFI模塊運行TCP服務器。由于TCP采用面向連接的方式,因此需要保證連接與被連接的雙方均在線才能實現數據互傳。同時面向連接的方式也使得數據在傳輸過程中具有不易丟失的特性。機器人連接服務器成功后開始通過Http協議獲取WIFI模塊中mjpg-streamer視頻服務器回傳的視頻流數據[10],并將每一幀數據顯示在Android APP的背景中。接著進入APP的控制模式,檢測用戶是否按下機器人控制按鈕,如按下則通過TCP通道向WIFI模塊傳達控制命令,WIFI模塊中的TCP服務器接收后并不進行任何識別處理,而是直接通過串口透明到單片機中,由單片機進行具體的識別并控制機器人行進。

圖6 上機位軟件流程圖
3.3視頻服務器軟件設計
機器人主控板中的視頻采集傳輸并不是通過單片機來實現,因為本文選用的單片機只是一款8位的單片機,無法處理視頻數據,因此本設計通過WIFI模塊燒寫的openwrt開源linux操作系統后,使用mipg-streamer程序完成視頻數據的采集、壓縮和傳輸功能。mjpg-streamer視頻服務器程序在linux操作系統上通過與WIFI模塊連接的USB攝像頭軟件采集實時視頻流數據,進行視頻壓縮后再通過http協議共享實時的視頻圖像數據,因此該部分不需要在主控板程序中進行軟件編程,而是通過開源系統openwrt完成。具體為:將USB攝像頭接入WIFI模塊后,WIFI模塊發射一個WIFI網絡,安卓手機APP客戶端連接上該WIFI網絡后通過視頻流的IP地址和視頻服務器端口進行查看,實現實時視頻監控功能[11]。
4 系統測試
4.1機器人系統運行測試
基于北斗系統的河流繪制兩棲機器人實物模型如圖7所示,本文設計的兩棲機器人采用輪槳一體結構,因此既可在陸地行走,也可以在水中行駛,實現整個測量過程中無須人工幫助直接下水,實用性能強。整個兩棲機器人的電路結構部分通過防水材料包裹,能在水中無慮的自由行駛。經過大量的測試,得出本文設計的兩棲機器人搭載大功率發射天線后遙控距離長達幾百米,能應付部分河流的測繪。操作人員進行適當位置調整能實現更遠距離的遙控測繪操作。

圖7 兩棲機器人模型圖
4.2Android APP遙控性能測試
本文研究的基于北斗系統的河流繪制兩棲機器人,其視頻傳輸作為衡量系統實用性的一個重要指標,首要進行大量測試以及數據分析的是視頻監控功能。在不同距離下對系統中的Android APP的視頻傳輸功能得出測試數據如表1所示,主要測試機器人與安裝Android APP手機在不同的通信距離下控制機器人行駛命令的正確性以及實時視頻幀率的變化。對表1進行分析得出在500 m的通信距離以內攝像頭的控制命令百分百正確,采集到的實時視頻的幀率也達到最高的25幀/s,而在500 m以后隨著通信距離的不斷增加,正確的命令數越來越少以及視頻幀率也越來越低,特別是在通信距離800 m以后兩者大幅度下降。這說明本課題設計的基于北斗系統的河流繪制兩棲機器人Android APP遙控的使用距離在500 m左右。
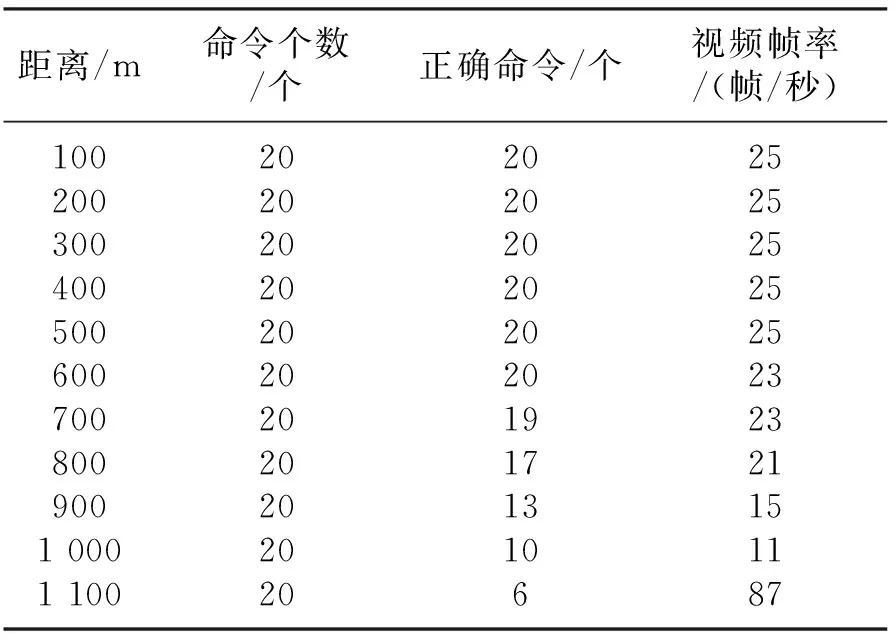
表1 Android APP視頻監控測試數據
4.3北斗定位系統精度測試
基于北斗系統的河流繪制兩棲機器人最重要的功能是河流地圖的繪制,因此北斗模塊采集到的經緯度定位數據在系統中舉足輕重。為了驗證系統的精確性,本文在機器人上同時放置一個市場上成熟的GPS模塊,并通過專門上位機軟件實時查看GPS模塊的經緯度數據,然后把機器人處于不同地點時刻北斗模塊采集到的經緯度數據與同時刻GPS模塊采集到的經緯度數據進行對比和記錄[12],因為所記錄到的平均數值比較大,所以剔除了部分過高和過低的數值,部分誤差數據如表2所示。經過對比發現本文設計的兩棲機器人通過北斗模塊采集到的定位數據與市場上成熟的GPS產品采集到的數據誤差在1~2 m之間,可以滿足河流地圖測繪需求。
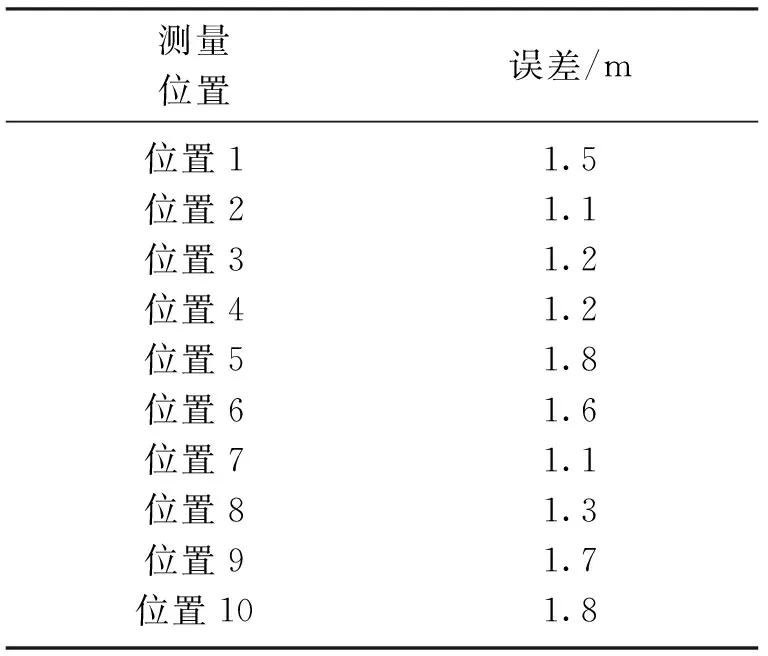
表2 北斗定位模塊與成熟GPS模塊定位誤差對比
5 結束語
本文結合短報文傳輸、TCP傳輸以及Http傳輸控制協議,詳細論述了基于北斗定位的兩棲機器人監測系統在河流地圖測繪的應用,設計一款基于北斗系統的河流繪制兩棲機器人。并給出了整個設計所涉及到的關鍵硬件、軟件的設計。經過測試基于北斗系統的河流繪制兩棲機器人能遠距離的遙控行駛,并且采集到的視頻數據在Android終端設備的APP上顯示流暢,采集到的實時經緯度定位數據經過服務器處理成功繪制出準確的河流形狀。若加以完善,通過4G通信技術提高遙控距離,該機器人設置能實現不限距離的超遠程遙控以及測繪。
[1] 于海燕. 河流水下地形測量中水位的圖上處理[J]. 測繪與空間地理信息, 2009, 32(5):179-181.
[2] 吳小梅. 測繪自動化技術在地形測量中的應用[J]. 建筑工程技術與設計, 2015(13):247.
[3] 方竹兵,秦曉剛. 數字化成圖技術在河流大型穿跨越地形圖測繪中的應用[J]. 城市建設理論研究, 2013(16):39.
[4] 邱純鑫. 基于地形特征的移動機器人定位[D]. 哈爾濱:哈爾濱工業大學, 2009.
[5] 王睿豪,李慶浩,王洪躍,等. 一種船用高效明輪推動器[J]. 科技經濟市場, 2015(8):18-18.
[6] 程龍. 輪槳一體式兩棲機器人的研制[D].哈爾濱: 哈爾濱工業大學, 2013.
[7] 馬捷,鄂金龍. 基于近場通信的WiFi傳輸連接方案[J]. 計算機工程, 2013(6):1-6.
[8] 潘未莊,陳石平. 采用北斗模塊的車載監控終端設計與實現[J]. 電子測試, 2013(16):45-47.
[9] 汪永松. 安卓手機APP開發套路之信息處理[J]. 電腦編程技巧與維護, 2014(20):57-62.
[10]汪永松. 安卓手機APP開發套路之HTTP通信[J]. 電腦編程技巧與維護, 2014(19):41-47.
[11]潘宇清. 網絡視頻服務器技術淺析[J]. China Public Security, 2009(5):18-20.
[12]唐旭,何秀鳳. 北斗衛星導航系統高精度相對定位性能分析[J]. 導航定位學報, 2013(3).:28-30,42
[13]黃開勝.學做智能車:挑戰“飛思卡爾”杯[M].北京:人民郵電出版社,2007.
[14]陳丁躍.現代汽車控制及其智能化[M].西安:西安交通大學出版社,2011.
[15]雷楚奇. 對安卓開發相關技術的研究[J]. 電子技術與軟件工程, 2015(24):74-74.
[16]DARCEY L.Android移動開發一本就夠[M].北京:人民郵電出版社,2011.
吳子岳 (1963-), 男, 工學博士、博士后,副教授,碩士生導師,主要從事機械及工程裝備研究。
高亢(1989-),男,碩士生,主要研究方向為機電一體化。
高亞東(1990-),男,碩士生,主要從事機電及機構學研究。
王董測(1992-),男,碩士生,主要從事機電及機構學研究。
Design and Implementation of an Amphibious Robot Monitoring System Based on Beidou Positioning
WU Ziyue,GAO Kang,GAO Yadong,WANG Dongce
(CollegeofEngineeringScienceandTechnology,ShanghaiOceanUniversity,Shanghai201306,China)
This paper introduces a remote measurement for amphibious robot drawing River map, with high power WIFI module can remotely control the robot around the shoreline in the water running. At the same time through the acquisition of real-time Beidou module positioning information using short message transmission service,transmit to the remote server, the remote server receives location information automatically according to the drawing of the river map. In practice, this system can accurately measure and draw the river map, and the positioning error information reach meter level high-precision, it is great meaningful to the map rendering system update.
River surveying and mapping; amphibious machine; Beidou module; short message transmission
10.13442/j.gnss.1008-9268.2016.04.018
2016-03-29
TP249
A
1008-9268(2016)04-0085-05
聯系人: 高亢 E-mail: gaokang2015@qq.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45