基于虛擬基線的干涉儀測向系統基線配置設計*
2016-11-07 07:01:26韋敏峰田德民
艦船電子工程 2016年10期
李 超 韋敏峰 李 迪 田德民
(中國船舶重工集團公司第七二三研究所 揚州 225001)
?
基于虛擬基線的干涉儀測向系統基線配置設計*
李超韋敏峰李迪田德民
(中國船舶重工集團公司第七二三研究所揚州225001)
通過外場應用條件下基于虛擬基線的多基線數字干涉儀設計、仿真,闡述了實際工程應用中,在工作頻率范圍、測向精度和相位差測量精度等約束條件下,如何設置天線陣列基線的問題,給出了不同基線配置間逐級解模糊的條件及基于虛擬基線配置方法的組陣設計依據,并驗證了該方法的有效性。
虛擬基線; 基線比; 解模糊; 相位差測量精度
Class NumberTN971
1 引言
干涉儀測向是電子對抗領域的基本問題[1],干涉儀測向系統存在最大無模糊視角范圍與測向精度對天線間距要求的矛盾,通常采用短基線來解相位模糊,長基線來保證測量精度[2~3]。但在實際工程應用過程中經常會遇到由于受高端波長限制短基線物理無法實現的情況,另外在干涉儀測向系統基線配置設計時往往會忽略相位差測量精度這一因素[4~5]。本文綜合考慮工作頻段、測向精度、天線尺寸和相位差測量精度等因素,提出了基于虛擬基線的基線配置方法,解決了以上工程實現中出現的問題。
2 干涉儀測向的數學描述
1) 模糊問題的出現
干涉儀測向是通過測量位于不同波前的天線接收信號的相位差,經過處理獲取來波方向,假定滿足遠場條件,具體參數定義如下:A、B是兩個全向接收天線(可接收±90°范圍內的信號),其基線長度為d,信號入射角為θ,信號波長為λ,信號到達天線陣元A,B時,波前的相位差為φ(絕對相位差),則:
(1)
在不考慮相位差測量誤差的情況下,令φ=π,最大不模糊角為θmax,基線長度d在設計時,應滿足:
(2)
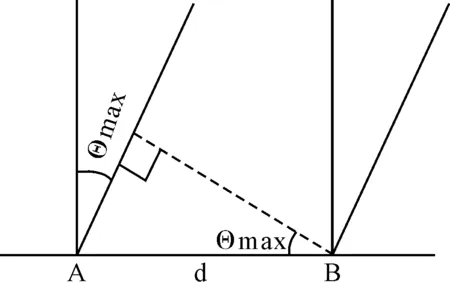

圖1 干涉儀測向模糊問題
2) 解模糊條件的數學描述
干涉儀解模糊的原理[8~10]為:若不考慮通道相位差誤差,任何短基線在無模糊的情況下都可以直接解更長基線的模糊,解模糊的公式如下:
(3)
在考慮通道相位差誤差的情況下,短基線只能解滿足一定條件的更長基線,必須逐級進行解模糊,最終解掉最長基線的模糊。解模糊的過程如下:
(4)
由式(4)可知,
(5)
要保證解模糊的結果正確,需滿足以下關系:
(6)
此時解模糊分以下幾種情況:
(1)實基線解實基線需滿足的條件
表1 實基線解實基線模糊各情況Δφ討論
由表1可知,實基線解實基線需滿足的條件為

(7)

(2)實基線解虛基線
表2 實基線解虛基線模糊各情況Δφ討論
由表2可知,實基線解虛基線需滿足的條件為
(8)

(3)虛基線解實基線模糊
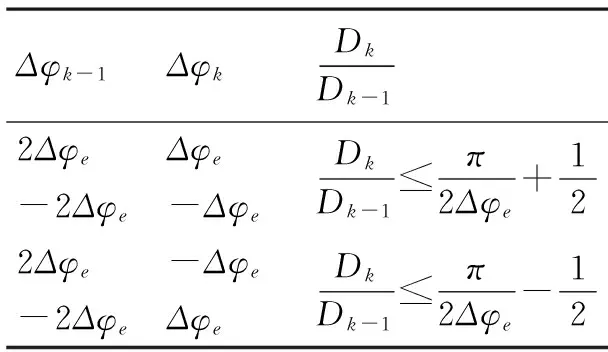
表3 虛基線解實基線模糊各情況Δφ討論
由表3可知,虛基線解實基線需滿足的條件為
(9)
(4)虛基線解虛基線
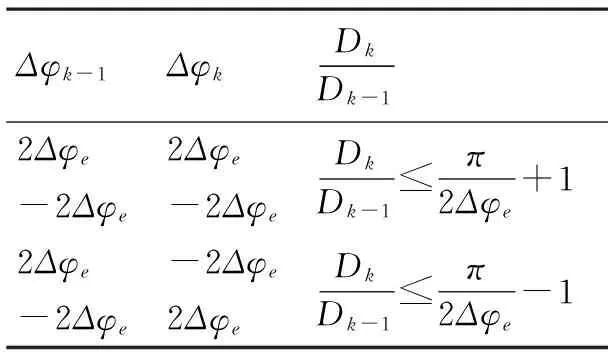
表4 虛基線解虛基線模糊各情況Δφ討論
由表4可知,虛基線解虛基線需滿足的條件為
(10)

3 基于虛擬基線的基線配置方法
天線陣列基線配置的問題可描述為:在規定工作波段內和規定偵察覆蓋范圍內設計盡可能長的基線保證測向精度,同時考慮到天線尺寸和相位差測量精度的約束條件下,如何確定天線的個數M和適當的基線比,當然,在滿足測向性能指標要求的前提下,需要的天線陣元數越少,且能夠在較大相位差測量誤差的環境下正確解模糊越好。
基于虛擬基線的基線配置步驟如下:
1) 確定最長基線長度
測向誤差的表達式為
(11)
由式(11)可得,
(12)
其中,λmax為規定工作波段內的最大波長,Δφk為通道相位差測量誤差,Δφk∈[-Δφe,Δφe],Δφe>0,θmax為規定偵察覆蓋最大范圍,Δθ為要滿足的測向誤差。
2) 確定最短基線長度
在不考慮通道相位差誤差的情況下,式(2)給出了最短基線長度的配置準則,在工程應用中往往天線(如平面螺旋天線)的物理尺寸遠遠大于最短基線長度的要求,此時可以通過虛擬基線加以解決。其次,各基線在進行相位測量時不可避免地存在測量誤差,為進一步保證最短基線長度無模糊性,應把相位差測量誤差做為參數變量引入設計當中。
(13)
3) 配置天線陣列基線比
(1)令d=M*d1。根據天線物理尺寸和最短基線長度配置最短基線d1。由于天線物理尺寸往往遠大于最短基線長度,因此,可通過虛擬基線構造。考慮天線陣元的最小間距p*d1,令dm-dn=(m+1)d1-m·d1=d1,在最長基線范圍內,列出所有的m+1和m的組合。
(2)根據上文提到的方法,計算出K1、K2、K3和K4。
(3)進行天線陣元數搜索。初始陣元為3個,基線長度分別為(m+1)d1,m·d1。通過K3判斷d1是否能解m·d1,若可解,易得m·d1可解(m+1)d1,最長基線無模糊;若不可解轉步驟(4)。
(4)陣元數加1。列出所有的(m+1)d1、m·d1和(M-2m-1)d1的組合。利用K1、K2、K3和K4計算出符合條件的最長的實基線或虛擬基線,保證基線解模糊速度最快。進行迭代處理。用計算得出的實基線或虛擬基線解更長的實基線或虛擬基線的模糊。若最長基線可解,輸出基線配置比,遍歷下一種組合。
(5)若所有組合均不可解,陣元數繼續加1,原理類比步驟(4),直到滿足最長基線可解。
4 外場應用設計實例
為了驗證以上配置算法的工程有效性,本文進行了如下設計實驗,工作頻率范圍2GHz~6GHz,偵察范圍±π/4,相位差測量誤差為±π/9,測向系統精度要求由于1.5°,平面螺旋天線物理尺寸r=25mm。
1) 確定最長基線長度
由式(12)得
2) 確定最短基線長度
由式(13)得
為便于工程應用,取d=475mm,d1=19mm。
3) 配置天線陣列基線比
(1)計算得M=d/d1=25。兩天線陣元間最小間距為2×25=50mm,p≥50/19=2.63,取p=3。
(2)由式(7)~式(10)計算得,


(3)從初始3個天線陣元開始,基線長度分別為(m+1)d1,m·d1。
則由m+1+m=M,
因為K3≤4<12,
所以無法從最短虛擬基線d1直接解實基線的模糊,因此3個天線陣元無法構造出滿足要求的基線配置。
(4)陣元數加1。
此時為4個天線陣元,此時將最長基線Md1配置成三段,分別為(m+1)d1,m·d1和(M-2m-1)d1,為便于工程應用,此處m取整數。由于陣元間距的限制,m≥p=3,從m=3開始遍歷基線組合。基線組合及解模糊步驟如表5所示。
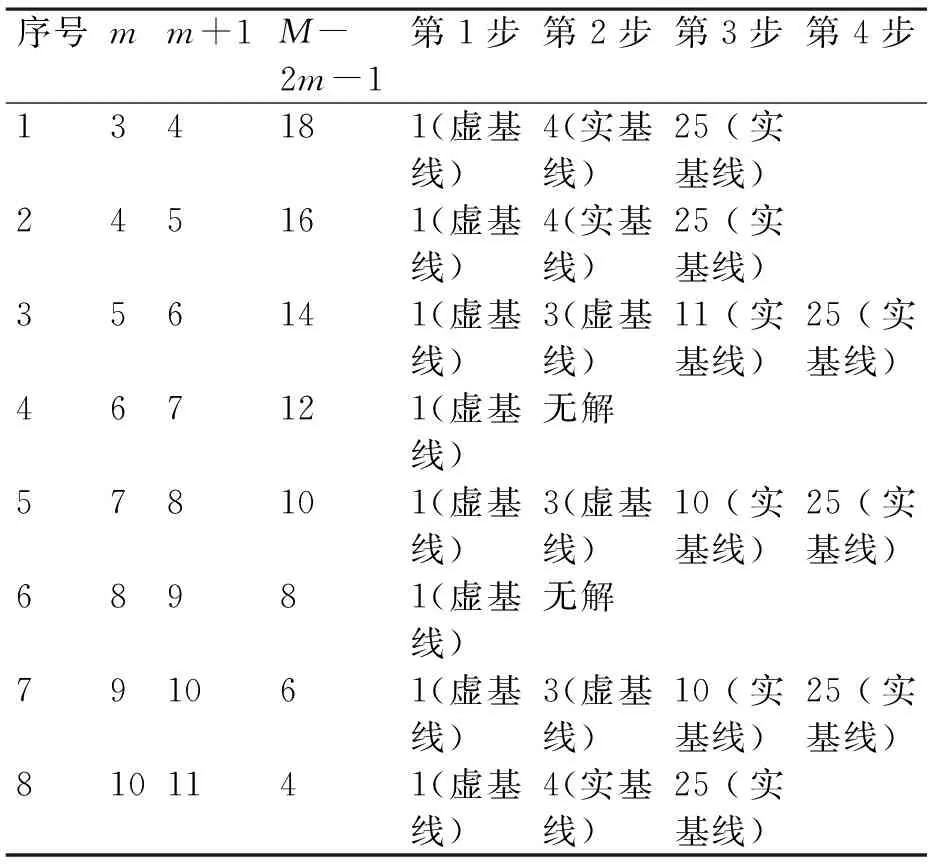
表5 基線組合及解模糊步驟
如表5所示,共8種組合方式,其中1、2、3、5、7、8號組合方式均能夠準確解最長基線Md1的模糊。根據需求選取其中一種組合方式,如8號組合方式,此時三段基線長度分別為76mm,190mm,209mm。
當信號入射角為45°時,干涉儀測向精度與頻率關系曲線如圖2所示。
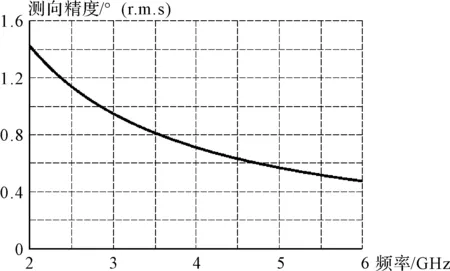
圖2 干涉儀測向精度與頻率關系曲線
當頻率為2GHz時,干涉儀測向精度與入射角關系曲線如圖3所示。
從圖2和圖3可以看出,按照以上算法設計出的天線陣列,在規定相位差誤差范圍內,頻段內、方位內都不會出現測向模糊,且達到了規定的測向精度。
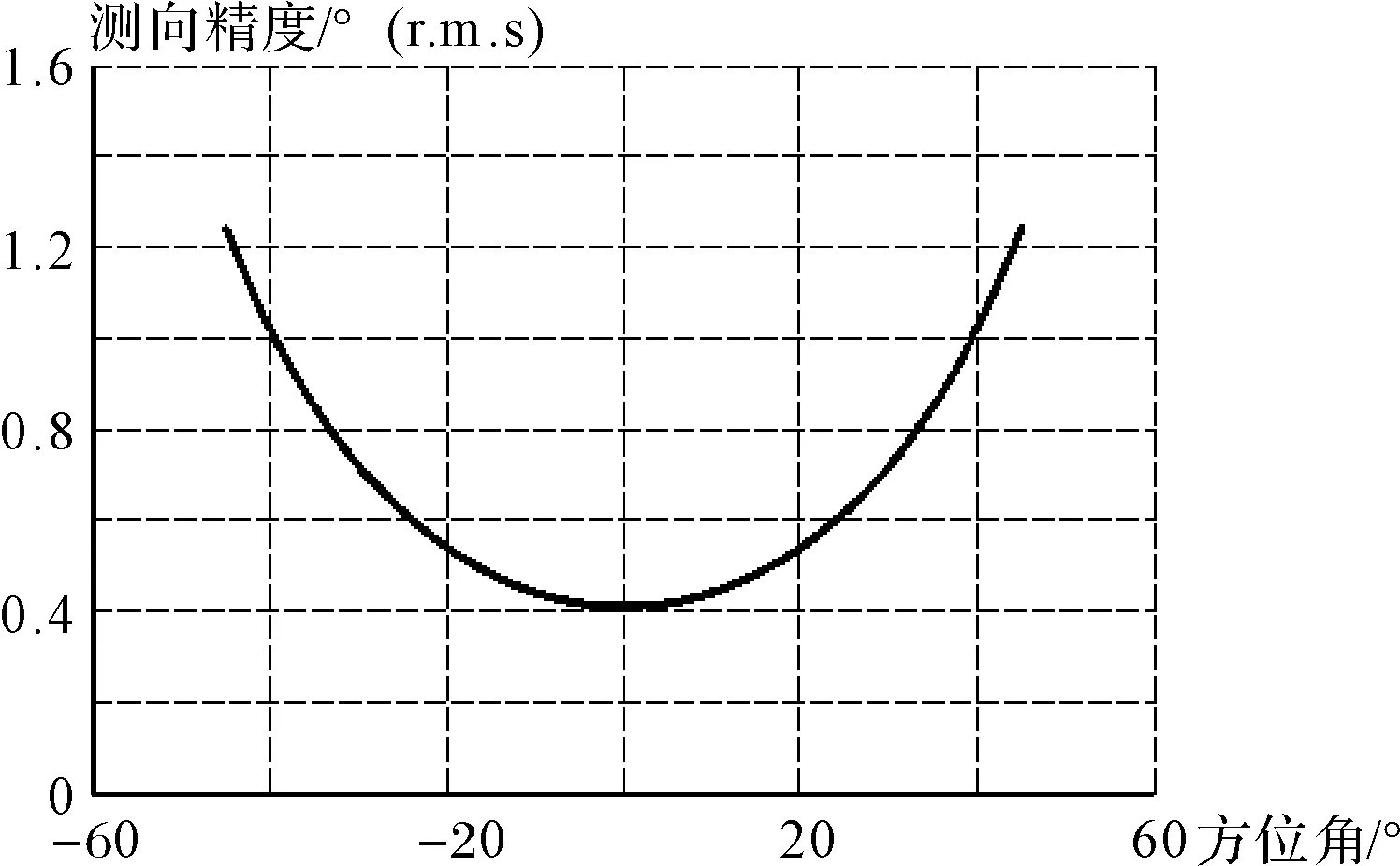
圖3 干涉儀測向精度與入射角關系曲線
5 結語
本文基于虛擬基線的基線配置方法給出了在工作頻率范圍、測向精度和相位差測量精度等約束條件下不同基線配置間逐級解模糊的條件及基于虛擬基線配置方法的組陣設計依據,保證了測向系統在頻段內、方位內都不會出現測向模糊,并能保證測向精度。同時,將相位差誤差做為參數引入設計當中,具有一定的工程實用性。下一步工作將進一步改進基線比迭代算法,使之迭代速度更優。
[1] 楊偉程.單站長基線干涉儀測向定位技術研究[D].西安:西安電子科技大學,2009.
[2] 李建軍.多基線干涉儀測向的基線設計[J].電子對抗,2005(3):8-11.
[3] 崔旭.基于虛擬基線的干涉儀測向改進方法[J].通信技術,2011,44(7):89-91.
[4] 司偉健,初萍.干涉儀測向解模糊方法[J].應用科技,2007,34(9):54-57.
[5] 王玉林,陳建峰.干涉儀測向基線組合方式選取依據初探[J].無線電工程,2012,42(6):52-54.
[6] 吳一帆.干涉儀基線組合對測向精度的影響[J].中國新通信,2014,16(2):60-61.
[7] 吳寶東,陳舒.基于相位干涉儀測向系統的相位誤差分析[J].艦船電子對抗,2008,31(3):74-76.
[8] 張文旭,司錫才,蔣伊琳.相位干涉儀測向系統相位誤差研究[J].系統工程與電子技術,2006,28(11):1631-1632.
[9] 李興華,顧爾順.干涉儀解模糊技術研究[J].現代防御技術,2008,36(3):92-96.
[10] 蔣學金,高遐,沈揚.一種多基線相位干涉儀設計方法[J].電子信息對抗技術,2008,23(4):39-45.
Baseline Configuration Design of Interferometer Direction Finding System Based on Virtual Baseline
LI ChaoWEI MinfengLI DiTIAN Demin
(723 Research Institute, CSIC, Yangzhou225001)
Taking frequency, accuracy of direction finding and accuracy of phase difference into consideration, this paper introduces the method of defuzzification step by step and proposes the baseline configuration design of interferometer direction finding system based on virtual baseline. At last, it carries out the simulation experiment and proves that the baseline configuration design can solve the problem of antenna array arrangement in multi-baseline digital interferometer effectively.
virtual baseline, ratio of baseline, defuzzification, accuracy of phase difference
2016年4月7日,
2016年5月27日
李超,男,工程師,研究方向:電子對抗。
TN971
10.3969/j.issn.1672-9730.2016.10.019
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21