基于北斗定位系統(tǒng)的自習(xí)室座位索引系統(tǒng)研究
2016-11-04 02:48:55陶帥劉瑞鄒精龍劉洪成
科技與創(chuàng)新 2016年17期
關(guān)鍵詞:物聯(lián)網(wǎng)
陶帥++劉瑞++鄒精龍++劉洪成
文章編號(hào):2095-6835(2016)17-0010-03
摘 要:自習(xí)室座位索引系統(tǒng)應(yīng)用了北斗導(dǎo)航定位系統(tǒng),并與PLC電路、程序編程相結(jié)合。該系統(tǒng)由五大模塊組成,各個(gè)模塊分別實(shí)現(xiàn)不同的功能,以滿(mǎn)足學(xué)生的需求,可以使學(xué)生們?cè)趯ふ易粤?xí)室座位時(shí)更加快速、便捷,并減少對(duì)學(xué)生學(xué)習(xí)的影響,符合物聯(lián)網(wǎng)人性化的發(fā)展理念。
關(guān)鍵詞:北斗定位系統(tǒng);自習(xí)室;座位索引系統(tǒng);物聯(lián)網(wǎng)
中圖分類(lèi)號(hào):TN967.1 文獻(xiàn)標(biāo)識(shí)碼:A DOI:10.15913/j.cnki.kjycx.2016.17.010
1 背景和意義
隨著我國(guó)教育水平的提高,本科生和研究生不斷地?cái)U(kuò)招,使得校園學(xué)生人數(shù)總量在不斷提升,因此,人均校園資源占有量在下降,并且校園擴(kuò)建速度遠(yuǎn)低于擴(kuò)招速度,校園基礎(chǔ)設(shè)施面臨的形勢(shì)越來(lái)越嚴(yán)峻。
圖書(shū)館、自習(xí)室等自習(xí)座位緊張狀況尤為突出。調(diào)查顯示,有些學(xué)生可能要花30 min左右來(lái)尋找自習(xí)座位。這無(wú)疑給學(xué)生帶來(lái)了麻煩,并造成時(shí)間的浪費(fèi)。每當(dāng)期末考試、考研前,我們會(huì)發(fā)現(xiàn)有很多同學(xué)在教學(xué)樓中尋找自習(xí)座位,即使一間教室已經(jīng)滿(mǎn)員,也會(huì)有學(xué)生進(jìn)入其中尋找座位,學(xué)生在自習(xí)室開(kāi)關(guān)門(mén)、走動(dòng)勢(shì)必會(huì)影響自習(xí)室內(nèi)正在學(xué)習(xí)的同學(xué),并且也浪費(fèi)了搜索座位的學(xué)生的時(shí)間。當(dāng)然,自習(xí)室存在空位使得校園資源得不到合理的利用。這將嚴(yán)重浪費(fèi)校園資源。
另外,隨著物聯(lián)網(wǎng)時(shí)代的到來(lái),校園設(shè)施必定要跟上時(shí)代發(fā)展的潮流,如何使校園自習(xí)室座位管理更加人性化,已經(jīng)成為了高校發(fā)展的一個(gè)熱門(mén)話(huà)題。本文將基于北斗導(dǎo)航定位系統(tǒng)對(duì)上述問(wèn)題提出解決方案。
2 設(shè)計(jì)方案原理
2.1 系統(tǒng)設(shè)計(jì)方案
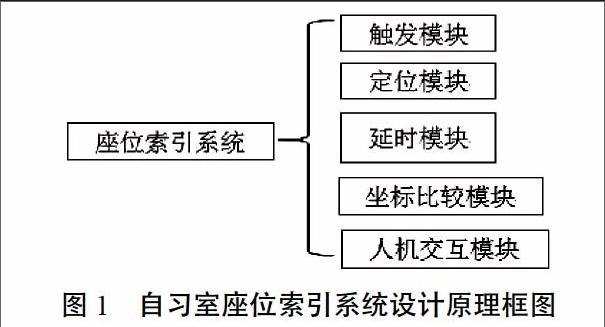
基于北斗導(dǎo)航定位系統(tǒng)的自習(xí)室座位索引系統(tǒng)設(shè)計(jì)原理如圖1所示。該系統(tǒng)由觸發(fā)模塊、定位模塊、延時(shí)模塊、坐標(biāo)比較模塊、人機(jī)交互模塊等幾部分組成。
該系統(tǒng)的特點(diǎn)及創(chuàng)新之處在于:①使用了北斗定位儀。該
系統(tǒng)將北斗導(dǎo)航定位儀應(yīng)用于創(chuàng)新方案中,極大地簡(jiǎn)化了系統(tǒng)結(jié)構(gòu),使得安裝更加方便,為用戶(hù)使用提供了便利。②應(yīng)用了PLC技術(shù)。該系統(tǒng)應(yīng)用PLC技術(shù)進(jìn)行延時(shí)模塊的設(shè)計(jì)。PLC技術(shù)的應(yīng)用使得系統(tǒng)結(jié)構(gòu)緊湊,程序設(shè)計(jì)簡(jiǎn)潔,開(kāi)發(fā)成本降低,并且無(wú)論是在未來(lái)的市場(chǎng),還是在現(xiàn)在的市場(chǎng),PLC元件都是易獲得元件。③應(yīng)用了坐標(biāo)比較系統(tǒng)。該系統(tǒng)采用計(jì)算機(jī)高級(jí)語(yǔ)言設(shè)計(jì)來(lái)判斷座位坐標(biāo)是否在教室內(nèi),使得程序更易被理解。④具備人機(jī)交互界面。學(xué)生可以通過(guò)手機(jī)、平板、電腦等終端查看教室座位的空余情況。
2.2 系統(tǒng)工作流程
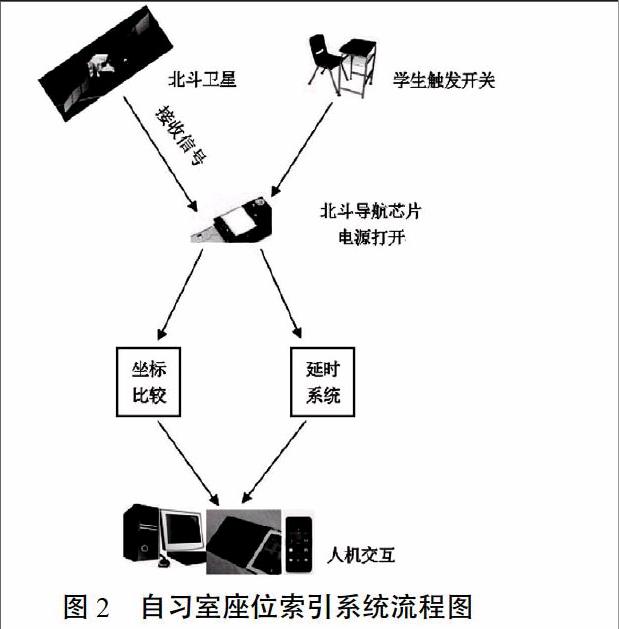
基于北斗導(dǎo)航定位系統(tǒng)的自習(xí)室座位索引系統(tǒng)工作流程如圖2所示。
該系統(tǒng)的工作流程為:①學(xué)生在找到自習(xí)室座位后,坐下并觸發(fā)開(kāi)關(guān),使得北斗導(dǎo)航芯片電源接通;②北斗導(dǎo)航芯片電源接通后,開(kāi)始接收北斗衛(wèi)星發(fā)射出的信號(hào),經(jīng)過(guò)處理,得到芯片所在位置的(x,y,z)三維坐標(biāo);③通過(guò)坐標(biāo)比較系統(tǒng),
將芯片所在的位置坐標(biāo)與教室4個(gè)角落的坐標(biāo)作比較,以此判斷坐標(biāo)是否在教室內(nèi);④考慮到學(xué)生上廁所、活動(dòng)等因素,該方案設(shè)計(jì)了延時(shí)系統(tǒng)來(lái)滿(mǎn)足學(xué)生們必要的活動(dòng)需求;⑤考慮到精度問(wèn)題,目前人機(jī)交互能夠做到的是判斷某個(gè)教室是否“滿(mǎn)員”,在將來(lái),隨著精度的提高,人機(jī)交互模塊能夠?qū)⒔淌易豢沼喾植紙D展示在平板、電腦、手機(jī)等終端設(shè)備上。
2.3 模塊分析
2.3.1 觸發(fā)模塊
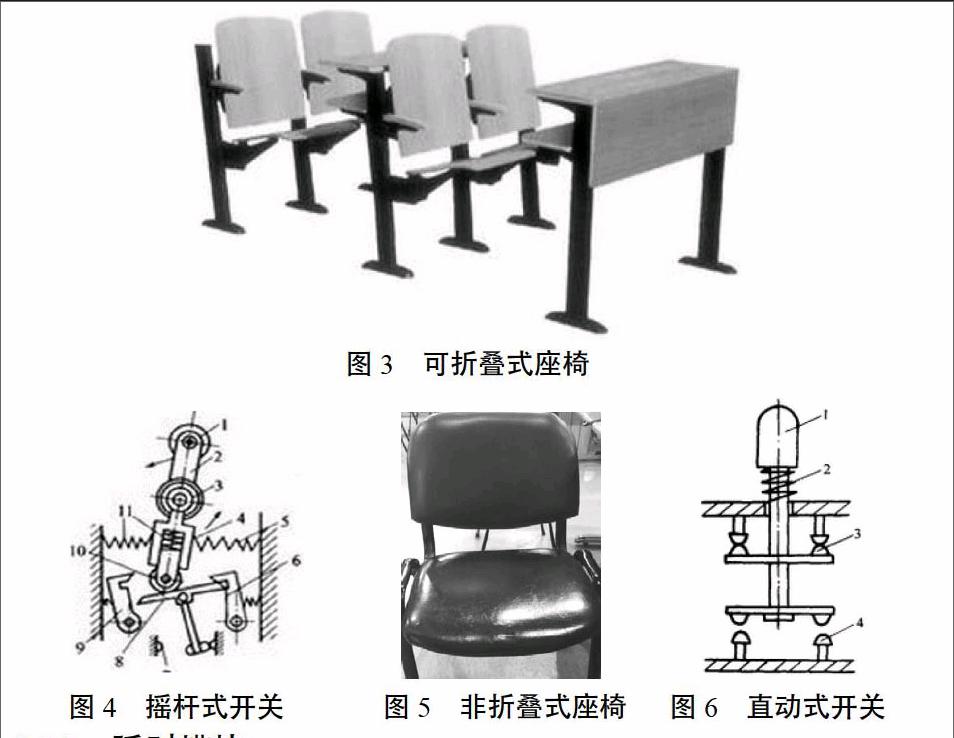
觸發(fā)模塊采用壓力元件觸發(fā)形式。觸發(fā)元件類(lèi)似于開(kāi)關(guān),但又不同于普通開(kāi)關(guān),需要根據(jù)不同的座椅選擇不同的觸發(fā)元件。當(dāng)座椅結(jié)構(gòu)如圖3所示時(shí),所需開(kāi)關(guān)為圖4所示的搖桿式開(kāi)關(guān);當(dāng)座椅形式為圖5所示的結(jié)構(gòu)時(shí),所需開(kāi)關(guān)為圖6所示的直動(dòng)式開(kāi)關(guān)。觸發(fā)元件采用的是開(kāi)關(guān)結(jié)構(gòu),使得方案設(shè)計(jì)靈活、簡(jiǎn)便。
2.3.2 定位模塊
北斗定位系統(tǒng)由空間段、地面段和用戶(hù)段3部分組成。為保證滿(mǎn)足精度的要求,北斗定位系統(tǒng)在全球任意地方將能夠接收到4顆衛(wèi)星信號(hào)。隨著北斗科技的發(fā)展,精度在不斷提高,米級(jí)、亞米級(jí)、厘米級(jí)已經(jīng)逐漸出現(xiàn)在公眾的視野內(nèi)。相信在不久的將來(lái),低成本、高精度的北斗定位系統(tǒng)將會(huì)用于民用領(lǐng)域。
本方案定位模塊采用北斗定位儀。北斗定位儀在定位中只接收北斗衛(wèi)星發(fā)射的信號(hào),經(jīng)過(guò)處理,得到定位儀所在的三維坐標(biāo)(x,y,z)。
2.3.3 延時(shí)模塊
延時(shí)模塊是考慮到學(xué)生們上廁所、外出活動(dòng)等必要的課余時(shí)間而設(shè)計(jì)的。延時(shí)模塊采用PLC電路設(shè)計(jì)。PLC具有功能強(qiáng)大、可靠性強(qiáng)等諸多優(yōu)點(diǎn)。另外,其結(jié)構(gòu)緊湊,易于集成化。
延時(shí)模塊的電氣原理如圖7所示。首先,當(dāng)某個(gè)學(xué)生坐在座位上時(shí),觸發(fā)常開(kāi)閉合開(kāi)關(guān)SB。圖7中,KT為斷電延時(shí)性時(shí)間繼電器,KT觸點(diǎn)為常開(kāi)閉合觸點(diǎn)。當(dāng)SB閉合時(shí),KT繼電器和KM接觸器通電,KT觸點(diǎn)與KM觸點(diǎn)閉合。其中,KM觸點(diǎn)控制北斗定位儀的開(kāi)關(guān)。當(dāng)KM觸點(diǎn)閉合后,北斗定位儀接通電源。本方案為學(xué)生們?cè)O(shè)計(jì)了10 min的正常活動(dòng)時(shí)間。當(dāng)學(xué)生起身后,SB觸點(diǎn)打開(kāi)。此時(shí),KT繼電器結(jié)束通電。由于KT為斷電延時(shí)性繼電器,所以KT觸點(diǎn)將在10 min后斷開(kāi)。換句話(huà)說(shuō),KM會(huì)在SB觸點(diǎn)打開(kāi)后繼續(xù)閉合10 min。當(dāng)學(xué)生在10 min內(nèi)回到自己座位上時(shí),SB觸點(diǎn)重新閉合,繼續(xù)接通KT繼電器和KM接觸器;當(dāng)學(xué)生結(jié)束學(xué)習(xí)不再回到座位時(shí),10 min后,KM觸點(diǎn)自動(dòng)斷開(kāi),北斗導(dǎo)航定位儀被關(guān)閉。
在本方案所設(shè)計(jì)的PLC梯形圖、語(yǔ)句表和時(shí)序圖中,相關(guān)的時(shí)序圖可幫助理解。斷電延時(shí)定時(shí)器TOF的分辨率100 ms,定時(shí)時(shí)間10 min,PLC梯形圖和語(yǔ)句表如圖8所示。此程序所涉及的PLC程序短、結(jié)構(gòu)簡(jiǎn)單。
圖8 PLC梯形圖和語(yǔ)句表
在圖9所示的PLC時(shí)序圖當(dāng)中,A段是由于學(xué)生上廁所或其他事情起身造成的。這一段小于10 min,在相關(guān)的事情做完后,學(xué)生又重新坐回原先座位,系統(tǒng)重新通電。圖9中的B段是由于該學(xué)生的離開(kāi)而造成的現(xiàn)象,而C段則是之后的另外一個(gè)學(xué)生又重新坐在這個(gè)座位所造成的現(xiàn)象。
圖9 PLC時(shí)序圖
2.3.4 坐標(biāo)比較模塊
圖10 教室坐標(biāo)圖
圖10為某個(gè)教室的平面模型圖。假設(shè)教室4個(gè)角落A,B,C,D的坐標(biāo)分別為(Ax,Ay,z)、(Bx,By,z)、(Cx,Cy,z)、(Dx,Dy,z),教室內(nèi)部任意座位E的坐標(biāo)為(x,y,z)。當(dāng)北斗定位儀計(jì)算出自己所在的位置后,即相當(dāng)于圖10中的E點(diǎn)(x,y,z)。此時(shí),我們需要設(shè)計(jì)相關(guān)的程序來(lái)判斷E點(diǎn)是否在ABCD面積之內(nèi)。為了使得系統(tǒng)語(yǔ)言更容易理解,本方案采用高級(jí)語(yǔ)言C語(yǔ)言進(jìn)行程序編程,通過(guò)面積計(jì)算來(lái)判斷E點(diǎn)是否在ABCD中,即當(dāng)Sabe+Sace+Scde+Sdbe=Sabcd時(shí),E點(diǎn)在ABCD內(nèi)。也就是說(shuō),E點(diǎn)所在的定位儀在此教室內(nèi)。當(dāng)Sabe+Sace+Scde+Sdbe>Sabcd時(shí),E點(diǎn)不在ABCD內(nèi)。也就是說(shuō),E點(diǎn)所在的定位儀不在此教室內(nèi)。
坐標(biāo)比較模塊是整個(gè)系統(tǒng)的軟件模塊,在今后的開(kāi)發(fā)過(guò)程中,將會(huì)更加注重軟件的科學(xué)性,并且盡可能地使得代碼更加簡(jiǎn)單。
#include
#include
int SH(double x,double y,double z)
{
double ax=0,ay=5,bx=4.8,by=1.4,cx=0,cy=-5,dx=-4.8,dy=-1.4;//假設(shè)測(cè)出的教室坐標(biāo)與坐標(biāo)軸不平行,且長(zhǎng)為8 m,寬為6 m//且教室高度都為3.3 m,此教室位于二樓
double Ax,Ay,Bx,By,Cx,Cy,Dx,Dy,S,AE,BE,CE,sin,cos,DE,SABE,SBCE,SCDE,SDAE;
Ax=ax-x,Ay=ay-y,Bx=bx-x,By=by-y,Cx=cx-x,Cy=cy-y,Dx=dx-x,Dy=dy-y;
AE=sqrt(Ax*Ax+Ay*Ay),BE=sqrt(Bx*Bx+By*By),CE=sqrt(Cx*Cx+Cy*Cy),DE=sqrt(Dx*Dx+Dy*Dy);
if (AE!=0&&BE!=0)
{
cos=(Ax*Bx+Ay*By)/AE/BE;
sin=sqrt(1-cos*cos);
SABE=0.5*AE*BE*sin;
}
else SABE=0;//輸入坐標(biāo)為E點(diǎn),計(jì)算三角形ABE面積
if (BE!=0&&CE!=0)
{
cos=(Bx*Cx+By*Cy)/BE/CE;
sin=sqrt(1-cos*cos);
SBCE=0.5*BE*CE*sin;
}
else SBCE=0;//計(jì)算三角形BCE面積
if (CE!=0&&DE!=0)
{
cos=(Cx*Dx+Cy*Dy)/CE/DE;
sin=sqrt(1-cos*cos);
SCDE=0.5*CE*DE*sin;
}
else SCDE=0;//計(jì)算三角形CDE面積
if (DE!=0&&AE!=0)
{
cos=(Dx*Ax+Dy*Ay)/DE/AE;
sin=sqrt(1-cos*cos);
SDAE=0.5*DE*AE*sin;
}
else SDAE=0;//計(jì)算三角形DAE面積
S=SABE+SBCE+SCDE+SDAE;
if (S>48||z<3.3||z>=6.6) return 0;//三角形面積總和比教室面積大或z坐標(biāo)不在教室內(nèi),返回0
else return 1;//否則返回1
}
void main()
{
double x,y,z;
int in;
printf("請(qǐng)輸入坐標(biāo): ");
scanf("%lf,%lf,%lf",&x,&y,&z);
in=SH(x,y,z);
if (in==1)
printf("在此教室內(nèi)\n" );
else
printf "不在此教室內(nèi)\n");
}
2.3.5 人機(jī)交互模塊
簡(jiǎn)單來(lái)說(shuō),人機(jī)交互就是人與機(jī)器之間可以交流,比如人類(lèi)看到手機(jī)屏幕上的各種信息。
考慮到北斗定位精度問(wèn)題,本方案所設(shè)計(jì)的人機(jī)交互模塊分為以下2種:①當(dāng)前,由于民用北斗定位系統(tǒng)精度遠(yuǎn)沒(méi)達(dá)到厘米級(jí)水平,并且北斗定位儀的成本很高,所以我們能夠做到的是查看教室內(nèi)的座位是否坐滿(mǎn)。我們?cè)诮淌抑行奶幹话惭b一個(gè)北斗導(dǎo)航儀,如圖11所示的O點(diǎn)位置。當(dāng)座位全部坐滿(mǎn)時(shí),北斗定位儀才被接通電源,并得到定位坐標(biāo)。此時(shí),通過(guò)坐標(biāo)比較系統(tǒng)判斷哪個(gè)教室已經(jīng)滿(mǎn)員,否則該教室仍有空余位置,學(xué)生仍可進(jìn)入學(xué)習(xí)。②隨著科學(xué)技術(shù)的發(fā)展,我們相信高精度、低成本的北斗定位系統(tǒng)在不遠(yuǎn)的將來(lái)會(huì)為大眾服務(wù)。當(dāng)北斗定位儀精度提高到厘米級(jí)時(shí),本方案便能夠?qū)⒔淌覂?nèi)空余的位置顯示在移動(dòng)終端上。如圖12所示,教室每個(gè)座位上都安裝有該系統(tǒng)。當(dāng)一些座位被學(xué)生所用時(shí)(如圖中黑點(diǎn)所示),在移動(dòng)終端屏幕上便顯示此部分變暗,只有亮著的位置才是學(xué)生可利用的位置。
3 發(fā)展前景
隨著北斗衛(wèi)星導(dǎo)航系統(tǒng)和物聯(lián)網(wǎng)科技的發(fā)展,人們正在尋找一種更加人性化、智能化的發(fā)展模式,使得科技能夠更好地服務(wù)于人類(lèi)。而隨著“中國(guó)精度”的出現(xiàn),北斗導(dǎo)航系統(tǒng)的精度可達(dá)亞米級(jí),甚至厘米級(jí)。可見(jiàn),在不久的將來(lái),自習(xí)室索引系統(tǒng)能夠?qū)⒚總€(gè)座位的使用情況反映在移動(dòng)終端設(shè)備上。這將使得教室座位得到更加合理的利用。
基于北斗定位系統(tǒng)的自習(xí)室座位索引系統(tǒng)將有效地節(jié)省了學(xué)生們的時(shí)間,提高了他們的自習(xí)效率,將促進(jìn)校園學(xué)習(xí)氛圍變得更加濃厚,對(duì)整個(gè)大學(xué)校園的學(xué)術(shù)研究將產(chǎn)生巨大的作用。
4 總結(jié)
經(jīng)過(guò)查詢(xún)大量文獻(xiàn),并結(jié)合切身體驗(yàn),本小組提出了一種基于北斗導(dǎo)航定位系統(tǒng)的自習(xí)室座位索引系統(tǒng)。將北斗導(dǎo)航系統(tǒng)應(yīng)用于本方案,并經(jīng)過(guò)不斷的改進(jìn),使得系統(tǒng)更加完善。北斗導(dǎo)航定位系統(tǒng)作為我國(guó)自主知識(shí)研發(fā)的定位系統(tǒng),必將為人類(lèi)帶來(lái)巨大的效益。自習(xí)室座位索引系統(tǒng)的研制成功符合社會(huì)未來(lái)的發(fā)展潮流,能夠使科技更好地服務(wù)于人類(lèi),使得學(xué)生們的學(xué)習(xí)和生活更加智能化,且符合物聯(lián)網(wǎng)的發(fā)展潮流,將為學(xué)生們帶來(lái)福音。
參考文獻(xiàn)
[1]尚秀旻,王曉冬.淺談北斗衛(wèi)星導(dǎo)航定位系統(tǒng)及其應(yīng)用[J].湖北成人教育學(xué)院學(xué)報(bào),2011,17(3):142-143.
[2]范龍,柴洪州.北斗二代衛(wèi)星導(dǎo)航系統(tǒng)定位精度分析方法[J].解放軍信息工程大學(xué),2009,29(1):25-27.
[3]賈永軍,張良,王立兵,等.北斗高精度定位技術(shù)試驗(yàn)研究[J].現(xiàn)代導(dǎo)航,2013,12(6):391-393.
[4]黃永林.淺談PLC技術(shù)應(yīng)用與發(fā)展[J].科技經(jīng)濟(jì)市場(chǎng),2014(05):76-77.
[5]楊明朗,王紅.人機(jī)交互界面設(shè)計(jì)中的感性分析[J].包裝工程,2007,28(11):11-13.
〔編輯:劉曉芳〕
猜你喜歡
軟件導(dǎo)刊(2016年9期)2016-11-07 21:56:29
軟件導(dǎo)刊(2016年9期)2016-11-07 21:32:45
中國(guó)科技博覽(2016年22期)2016-11-01 15:02:01
中國(guó)科技博覽(2016年22期)2016-11-01 13:21:09
中國(guó)科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識(shí)與技術(shù)(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國(guó)新通信(2016年16期)2016-10-18 11:01:39
中國(guó)新通信(2016年16期)2016-10-18 11:00:54
科學(xué)與財(cái)富(2016年28期)2016-10-14 01:24:06
