廣州地鐵3號線列車ATO模式對標原理及異常故障分析
2016-10-31 11:34:45魏曉婷
鐵道機車車輛 2016年2期
關鍵詞:系統
魏曉婷
(廣州地鐵集團有限公司, 廣東廣州 510000)
?
廣州地鐵3號線列車ATO模式對標原理及異常故障分析
魏曉婷
(廣州地鐵集團有限公司, 廣東廣州 510000)
廣州地鐵3號線列車在采用自動駕駛模式(ATO)時,時常出現停車對標異常的故障。以廣州地鐵3號線為例,通過分析列車ATO模式對標的原理,講解制動過程中電空制動的配合方式,以具體案例為依據,剖析產生對標異常故障的具體原因,并提出切實有效的解決方案。
廣州地鐵3號線; ATO; 電空制動; 對標異常
廣州地鐵3號線呈南北走向,從南到北依次貫穿番禺區、海珠區、天河區和白云區,是廣州城市公共交通的主干線,日均客流量超過90萬,高峰行車間隔為3 min 30 s,同時車站站臺均配置了屏蔽門系統。如此大客流、高密度的運營對列車的停車精度提出了更高的要求。為了準點高效運營,3號線列車采用自動駕駛模式(ATO),即無需司機操作,由車載設備控制列車的啟動、加速、巡航、惰行、制動及精準停車。
列車停車精度異常直接縮減了乘客上、下車通道的寬度,影響乘客上、下列車的速度,延長列車停站時間,嚴重情況下容易導致列車晚點運行。因此,3號線列車在招標合同中對列車停車精度提出了明確要求:列車由信號設備控制,且以ATO模式運行時,在所有車站的停車精度要求如下:±300 mm以內,大于99.99%;±500 mm以內,大于99.9998%
1 ATO模式對標原理
ATO模式下,信號系統(簡稱VOBC)根據列車的實時速度值、加速度曲線以及到站的距離值,自動計算出動態的速度曲線,并由此時給出列車運行的推薦速度,同時輸出牽引、制動命令及指令值,控制列車按照預定速度運行。通過實時對比實際速度與推薦速度之間的差值,動態調整指令值的大小,實現停車精度的準確控制。廣州地鐵3號線站臺配備屏蔽門,因此要求具有較高的停車精度。
列車接收到信號系統發出的牽引制動指令后,由列車控制單元VCU將指令轉換為模擬量后送至牽引及制動系統。列車的制動模式分為氣制動和電制動兩種。
氣制動需要通過制動夾鉗施加,受制于氣缸充、放氣以及夾鉗動作固有的機械延遲,響應時間具有延時性,因此難以實現對停車精度的準確控制。
電制動是通過控制電力電子器件的通斷,利用電機工況轉換實現制動效果,動態調節效果較好,更容易實現制動過程的精準控制,因此若制動全過程均使用電制動,將更有利于列車準確對標,電制動亦可分為再生制動和電阻制動兩種。列車優先進行再生制動,當網壓高于某個特定值(如1 850 V),或牽引系統線路電壓低于接觸網電壓而無法進行再生制動時則進行電阻制動。
1.1再生制動
再生制動亦稱之為反饋制動,是一種常見的車輛制動方式,通過將牽引電機的電動機工況轉變為發動機工況,將列車的動能轉換為電能,電能通過受電弓反饋給供電接觸網,可供其他相鄰運行的列車使用。再生制動過程要確保牽引系統與接觸網連接,理想狀態下可控制列車直至停止狀態,停穩后施加氣制動保持列車處于靜止狀態。圖1為典型的再生制動的控制過程。
當牽引系統收到VCU發出的制動命令后,開始執行再生制動。圖1詳細表述了再生制動的全過程,ED-Brake為電制動力曲線圖(即圖中藍色線),EP-Brake為氣制動曲線圖(即圖中紅色線),0~t1期間輸出恒定的制動力,使列車速度逐步下降,t1時刻速度下降至一定數值后電制動力開始逐漸減小,t2時刻列車速度接近0.5 km/h,制動系統發出停車制動命令,氣制動力逐步上升,由于氣制動固有的延時特性,此時停車制動仍屬于建立期間,未真正施加停車制動,t3時刻列車速度為0,t4時刻施加停車制動,電制動完全退出。再生制動時電能回饋暢通,電能可以全部回饋給接觸網,因此再生制動可以制動列車到接近停車(即t2時刻,列車速度為0.5 km/h)。列車接近停穩時,再生制動因電機停止轉動而消失,為了確保列車停穩,制動系統開始施加氣制動。

圖1 再生制動過程中電制動與氣制動的配合
1.2電阻制動
當再生制動產生的能量不能被接觸網吸收時,制動時產生的能量通過制動電阻消耗掉,稱之為電阻制動。制動過程中是將牽引電機的動能轉換為制動電阻的熱能,屬于不可逆的能量轉換模式。牽引系統一旦檢測到接觸網無法吸收反饋的能量時,控制斷開與接觸網的連接,開啟電阻制動功能。廣州地鐵3號線列車制動電阻采用自然風冷模式,依靠列車運行過程中產生的風量將制動電阻的熱能帶走。當減速度過大(即制動力過大)或列車速度較低(即風量較小)時,自然風無法及時將熱量散失,制動電阻溫度持續升高,當溫度達到制動電阻的溫度限定值時,由于制動電阻無法繼續散失熱量,從而導致制動率下降。當電制動開始下降而無法滿足總的制動力要求時,需要通過氣制動加以補償。VCU將總制動力及電制動力的值送至EBCU,兩個力的差值即作為氣制動力值的大小。由于氣制動固有的機械延遲,導致電空轉換過程中制動力精度較差,難以實現制動的準確控制。若此過程發生在列車接近停車階段,列車停車精度異常的情況更加明顯。
圖2為典型的電阻制動控制過程。其中藍色為電制動(ED-Bremse)曲線,紅色為氣制動(EP-Bremse)曲線。0~t1期間輸出恒定的制動力,t0時刻列車控制單元(VCU)向EBCU(制動控制單元)發送停車制動請求命令(請求施加氣制動的命令),此時EBCU控制制動單元施加氣制動,t0~t1為氣制動延遲施加的時間,t1時刻為電阻制動能夠達到的最大制動力時刻,電制動力逐漸下降,與此同時,氣制動建立完成并逐步施加,t2時刻VCU控制電阻制動全部關閉,完全由氣制動實現制動控制,列車速度進一步降低,t3時刻速度下降至1 km/h且EBCU在已經施加的氣制動基礎上,進一步增大氣制動力,至t4時刻氣制動力已達到停車制動力的大小,此時列車施加停車制動使列車完全停穩。
2 影響停車精度的主要因素
列車進站停車階段,影響列車停車精度的主要因素有兩方面,即制動系統跟隨性是否良好以及車載信號系統控制的準確性。
2.1制動系統跟隨性
車載信號系統根據列車實際速度及實際加速度實時調推薦速度和牽引制動模擬量的大小。通常影響跟隨性的因素為電空制動的切換。分析可知,電制動動態調節效果較好,氣制動則較差,因此制動過程中氣制動過多介入,或電空制動切換速度設置不當,便可能影響制動系統的跟隨性,最終影響停車精度。
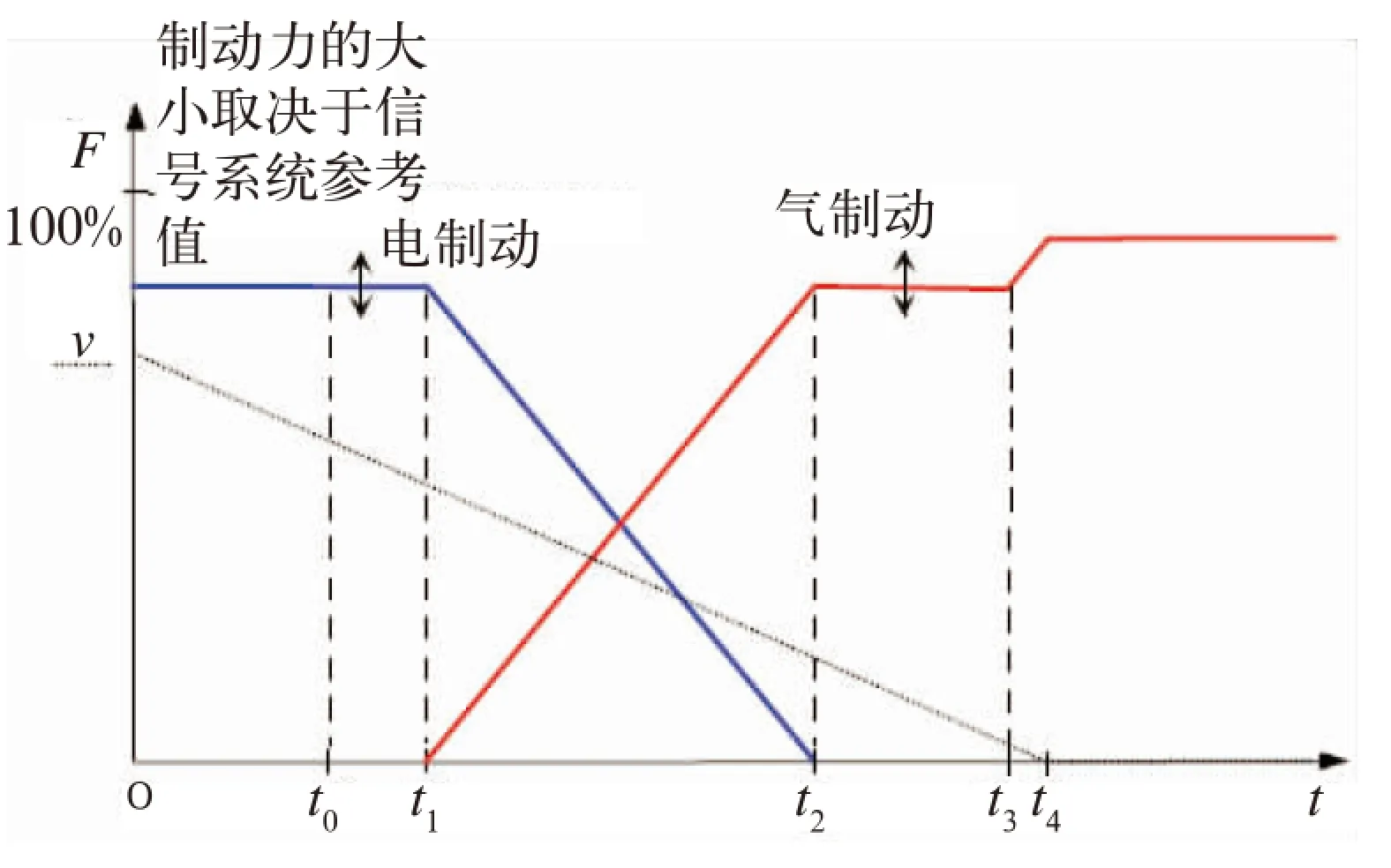
圖2 電阻制動過程中電制動與氣制動的配合
2.2信號系統控制的準確性
ATO模式下列車進站過程中主要受制于車載信號設備,其控制的準確性是影響停車精度的關鍵性因素。影響控制指令的主要因素有以下幾方面:
(1)測速的準確性。信號系統通過測速電機和多普勒雷達準確的測量出列車的速度和加速度,并以此為依據確定牽引或制動的選擇及指令值的大小,并繪制出列車運行曲線,實現對列車速度的實時監控,達到精確停車的標準。
(2)列車位置定位的準確性。列車定位是通過軌道旁信號標志和車載信號標志讀取器共同完成,如果不能對列車目前的位置進行精確定位,則無法通過算法預估列車的停車位置,所以這也是影響停車精度的關鍵因素。
(3)車載ATO系統軟件的算法。即使列車的速度和定位都能滿足要求,如果軟件算法不當,會導致繪制的運行曲線不夠準確,從而出現頻繁調節牽引制動模擬量的情況,影響列車停車精度。
3 故障案例分析
信號系統實時采集以下參數:推薦速度、實際速度、加速度及VOBC輸出的牽引制動模擬量,實現列車準確對標的精確控制,其中推薦速度為信號系統綜合列車所處的位置及當前實際速度值等因素,計算出來的目標速度值。加速度曲線可直觀反映列車對VOBC輸出的牽引制動模擬量的響應情況,各參數在圖3、圖4中的對應曲線為:
圖3為停車精度正常情況下的各參數曲線,從圖中可知,列車速度能完全貼合推薦速度,也證明了信號系統控制較為精準,制動系統響應性能較好。

圖3 停車精度正常時信號系統的采集數據
圖4為停車精度異常時的各參數曲線圖,可大致分為4個階段進行分析。第1階段由于制動系統響應較差,信號系統輸出了最大模擬量,但制動系統并未按此要求響應,導致列車實際速度大于推薦速度。進入第2階段后,制動系統開始響應信號系統輸出要求,按最大加速度要求制動,速度逐步下降。第3階段后,實際速度已經逐步貼近推薦速度,信號系統認為列車速度已經得到有效控制,開始減小模擬量的輸出,但是由于傳輸的固有延遲,制動系統并未立刻響應信號系統輸出的要求,仍以最大加速度制動。至第4階段,制動系統才開始響應信號系統輸出模擬量減小的要求,加速度逐漸減小,實際速度逐步超出推薦速度,此時信號系統增大模擬量的輸出,要求列車以最大加速度制動,但制動系統并未按要求響應,最終導致列車沖標。
綜上所述,制動系統響應性能會導致信號系統調整控制要求,但是信號系統也未綜合考慮響應的固有延遲,低速情況下仍然反復調整輸出模擬量,必然會導致列車沖標。
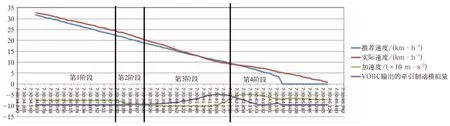
圖4 停車精度異常時信號系統的采集數據
3號線要求的對標精度為±500 mm,若列車停車精度超出規定范圍后,車載信號系統將無法輸出開門指令,車門與屏蔽門均無法自動打開。嚴重情況下需人工操作重新對標,往往容易造成列車晚點運行。列車正常對標情況下,列車控制單元VCU記錄的數據如圖5所示,相關的信號代表的含義為:
1)$VREF:列車速度值;
10)$FIEFG1:激活端三節列車電制動力實際值;
11)$FIEFG2:非激活端三節列車電制動力實際值;
13)$FIMFG1:激活端三節列車氣制動力實際值;
14)$FIMFG2:非激活端三節列車氣制動力實際值;
制動緩解情況下,制動力為零,負值越大表示制動力越大。從圖5可知,當列車速度達到0.764 4 km/h時,電制動力開始逐步減弱,氣制動補償以保證總制動力符合要求,這種情況下再生制動充分發揮了作用,停車制動過程控制準確,因此達到了準確對標的要求。
一旦電制動轉換為電阻制動模式時,通常會導致氣制動過早介入,由于制動控制系統的跟隨性較差,滿足不了精確對標的要求。以2015年4月21日捕捉的一起沖標故障為例,分析異常對標的原因。從圖6中可知,當列車速度降低至5.589 3 km/h時,電制動力開始減弱,氣制動逐步施加,由于電空轉換時,氣制力施加延遲,且調節性能較差,總制動力未達到預定要求,最終導致列車沖標。
為了進一步驗證氣制動提前介入是引起列車沖標的原因,利用制動系統(EBCU)采集的數據做深入的分析,所采集的數據如圖7所示,當列車速度降低至7 km/h時,牽引系統向制動系統發出“stopping brake request”命令(圖中黃色豎線對應位置),此時電制動開始逐步減弱,根據氣制動計算值,氣制動應立刻補充因電制動力減小而削減的制動力。實際情況并非如此,氣制動實際值相對理論計算值延遲,且氣制動力比預期小,隨著電制動力快速減弱,氣制動力補償較為緩慢,未達到快速補償總制動力的目的,總制動距離增加。
列車施加氣制動時,由于排出制動風缸壓縮空氣及夾鉗動作需要一定時間,通常制動系統從接收命令至氣制動建立起來,需要至少400 ms,因此為了電空轉換時保證總制動力不變,通常要求電制動延遲退出,應充分考慮氣制動施加所需的固有時間。

圖5 ATO停車精度正常時氣制動介入時間數據

圖6 ATO停車精度異常時氣制動介入時間數據

圖7 列車對標精度異常時制動系統數據
綜上所述,氣制動提前介入情況下,若電制動退出時機設置不合理,氣制動未能及時補償因電制動退出削減的制動力,必將會導致列車沖標。
4 結束語
為了解決車輛制動響應延遲問題,可從兩方面入手,一方面增加電制動延遲退出功能,彌補氣制動延遲施加帶來的制動力減弱問題,另一方面優化氣制動施加條件,即當列車速度低于一定值時(如10 km/h),氣制動施加預壓力,制動夾鉗預先動作,縮短氣制動建立時間,一旦電制動退出,氣制動可立刻予以補償。因此車輛設計階段需充分考慮這兩方面因素,確保制動跟隨性能良好。
列車停車異常是一直困擾地鐵列車車輛與信號接口的重大疑難問題,只有車輛及信號系統協同解決,方能充分保證列車停車精度滿足要求。
[1]廣州市軌道交通三號線車輛采購招標文件 GXTC-0205009-2[Z].
[2]西門子(中國)有限公司.Guangzhou Metro Line 3 Functional Specification Drive and Brake Control[Z].北京:西門子(中國)有限公司,2004.
Stop Benchmarking Principle and Fault Analysis of ATO Mode for Guangzhou Metro Line 3 Train
WEIXiaoting
(Guangzhou Metro Corporation, Guangzhou 510000 Guangdong, China)
The failure of stop benchmarking anomaly in ATO mode often occurred in the train of Guangzhou metro line 3. Taking the train of Guangzhou metro line 3 as an example, this paper analyzes the benchmarking principle of ATO mode, introduces the braking process of electric pneumatic braking, dissects the fault reason of stop benchmarking abnormally based on the specific case, and puts forward the effective solutions.
Guangzhou metro line 3; ATO; electro pneumatic brake; stop benchmarking anomaly
1008-7842 (2016) 02-0112-04
??)女,助理工程師(
2015-11-30)
U239.5
Adoi:10.3969/j.issn.1008-7842.2016.02.27
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
