橫向互聯(lián)空氣懸架車身高度調(diào)節(jié)模糊控制
2016-10-27 01:42:57琚龍玉任世恒周揚揚
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2016年9期
關(guān)鍵詞:系統(tǒng)
琚龍玉,任世恒,周揚揚,李 美
(1.江蘇大學(xué) a.汽車與交通工程學(xué)院; b.機械工程學(xué)院,江蘇 鎮(zhèn)江 212013;2.海南大學(xué) 機電工程學(xué)院,海口 570228)
?
橫向互聯(lián)空氣懸架車身高度調(diào)節(jié)模糊控制
琚龍玉1a,任世恒1a,周揚揚1b,李美2
(1.江蘇大學(xué)a.汽車與交通工程學(xué)院; b.機械工程學(xué)院,江蘇 鎮(zhèn)江212013;2.海南大學(xué) 機電工程學(xué)院,海口570228)
為解決橫向互聯(lián)空氣懸架因結(jié)構(gòu)特點難以充分發(fā)揮車身高度調(diào)節(jié)優(yōu)勢的問題,構(gòu)建了專門適用于橫向互聯(lián)空氣懸架車身高度調(diào)節(jié)控制策略。針對系統(tǒng)非線性與時滯性引起的車身高度超調(diào)現(xiàn)象,設(shè)計了車身高度模糊控制器。整車采用2個二維模糊控制器對前后空氣彈簧進行控制:前空氣彈簧控制輸入以目標(biāo)高度為基準(zhǔn),解決調(diào)節(jié)過程中超調(diào)明顯等問題;后空氣彈簧控制輸入以前空氣彈簧處實際車身高度變化為基準(zhǔn),提高高度調(diào)整過程中車身姿態(tài)的穩(wěn)定性。結(jié)果表明:前后控制器分工協(xié)作不僅有效解決了調(diào)節(jié)過程中出現(xiàn)的超調(diào)現(xiàn)象問題,而且保證了車身姿態(tài)的穩(wěn)定性。
空氣懸架;橫向互聯(lián);車身高度調(diào)節(jié);車身姿態(tài);模糊控制
空氣懸架以空氣彈簧作為彈性元件,利用氣體的可壓縮性實現(xiàn)其彈性作用,能滿足車輛行駛平順性和操縱穩(wěn)定性的雙重需求,因而得到廣泛應(yīng)用。車身高度調(diào)節(jié)是空氣懸架的主要功能之一。系統(tǒng)根據(jù)駕駛員意圖和車輛實際行駛狀況,主動調(diào)節(jié)空氣彈簧內(nèi)氣體質(zhì)量,從而實現(xiàn)車身高度的自適應(yīng)調(diào)整[1-2]。徐興等[3]針對車身高度調(diào)節(jié)過程中存在的“過充”、“過放”以及振蕩現(xiàn)象,提出變速積分PID/PWM高度控制策略,并進行了仿真和臺架試驗,結(jié)果表明,提出的控制策略能夠滿足車身高度調(diào)節(jié)要求。Hyunsup Kim等[4]提出一種車身高度與車身姿態(tài)調(diào)節(jié)的非線性控制方法,采用滑模控制來提高控制精度和克服空氣懸架系統(tǒng)的非線性與參數(shù)不確定性,研究結(jié)果表明:該控方法能實現(xiàn)車身高度穩(wěn)定調(diào)節(jié)。趙玉壯等[5]將空氣懸架系統(tǒng)充放氣非線性模型通過狀態(tài)反饋進行全局線性化,在線性域中設(shè)計滑膜控制器,仿真結(jié)果表明:基于狀態(tài)反饋線性化方法設(shè)計的滑膜控制器能有效克服充放氣過程的非線性特性。
隨著汽車技術(shù)的發(fā)展,將前后軸原本相互獨立的空氣彈簧用管路連接構(gòu)成橫向互聯(lián)空氣懸架,當(dāng)受到路面沖擊時,連通的空氣彈簧間相互充當(dāng)附加氣室,可起到緩和路面沖擊、保持車身姿態(tài)等作用[6]。然而將現(xiàn)有空氣懸架車身高度控制策略應(yīng)用于橫向互聯(lián)空氣懸架系統(tǒng)時,由于載荷分布不均及質(zhì)量流量的時變特性,連通的空氣彈簧之間氣體頻繁交換,充放氣難以停止,導(dǎo)致車身高度調(diào)節(jié)功能失效。但單純實現(xiàn)互聯(lián)而放棄車身高度調(diào)節(jié)的能力得不償失,為此,需構(gòu)建專門適用于橫向互聯(lián)空氣懸架的車身高度控制策略。因此,在橫向互聯(lián)空氣懸架充放氣結(jié)構(gòu)的基礎(chǔ)上建立整車車身高度調(diào)節(jié)數(shù)學(xué)模型,設(shè)計車身高度模糊控制策略,解決超調(diào)明顯、調(diào)節(jié)時間過長等問題,同時,改善因高度調(diào)節(jié)不同步導(dǎo)致的車身姿態(tài)惡化現(xiàn)象。
1 系統(tǒng)設(shè)計
1.1系統(tǒng)工作原理
橫向互聯(lián)空氣懸架將前后同軸的空氣彈簧用管路連接,連通的空氣彈簧之間氣體可自由交換,在傳統(tǒng)充放氣系統(tǒng)基礎(chǔ)上進行改進,提出對互聯(lián)空氣彈簧同時控制的充放氣系統(tǒng),并在不同管路中安裝充放氣電磁閥,通過控制對應(yīng)電磁閥開閉調(diào)節(jié)車身高度。橫向互聯(lián)空氣懸架充放氣系統(tǒng)工作原理如圖1所示。
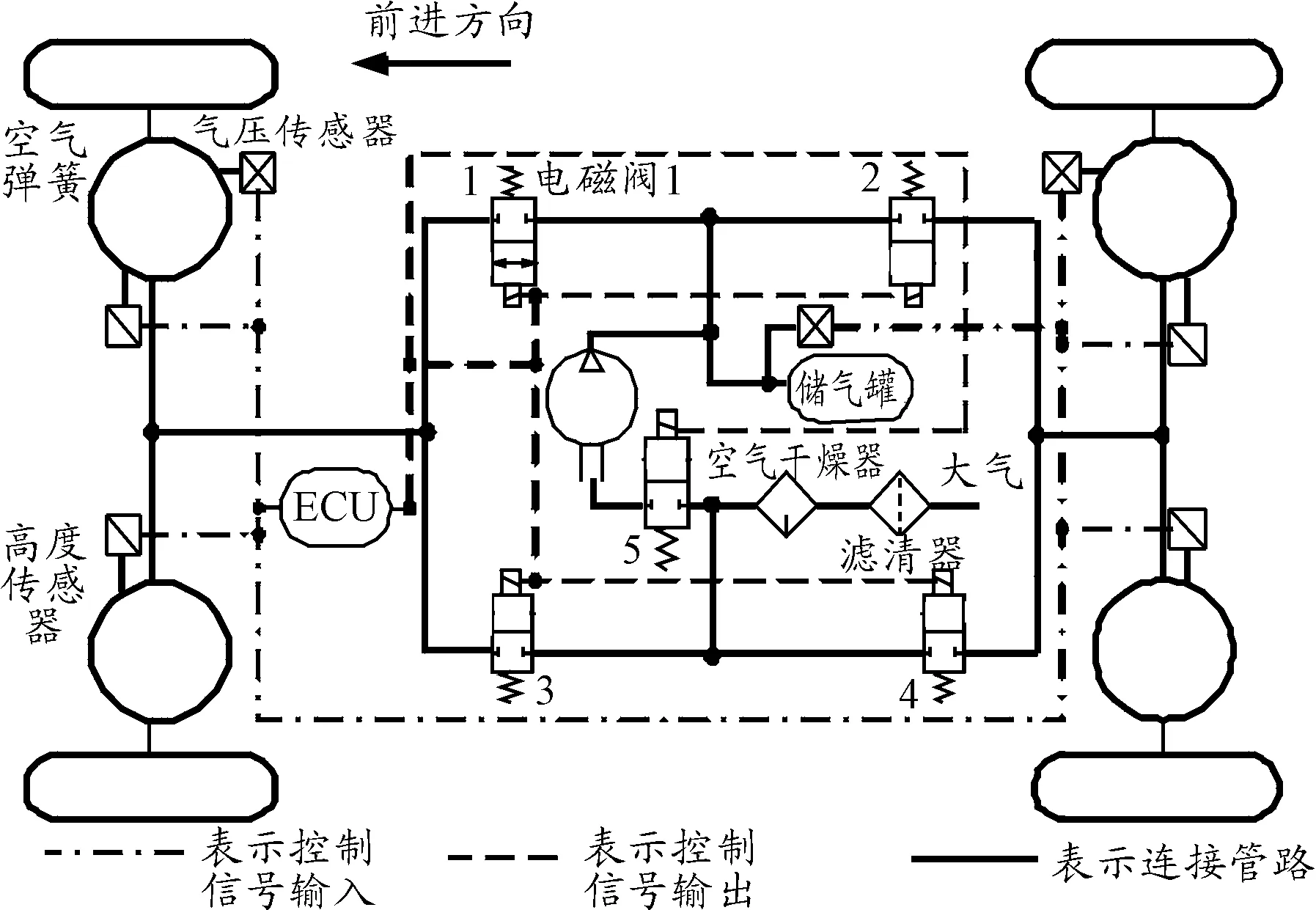
圖1 橫向互聯(lián)空氣懸架充放氣系統(tǒng)工作原理
ECU根據(jù)輸入信號判斷車輛狀態(tài),其中輸入信號包括前右、后右2個氣壓傳感器實時采集的空氣彈簧氣壓信號,以及4個高度傳感器采集的高度信號。當(dāng)車輛狀態(tài)對車身高度有需求時,ECU按照內(nèi)部設(shè)定邏輯單元,觸發(fā)對應(yīng)充放氣電磁閥,完成車身高度調(diào)節(jié)過程。電磁閥1和2為充氣電磁閥,電磁閥3和4為放氣電磁閥。儲氣罐作為車身升高的氣源,當(dāng)儲氣罐內(nèi)氣體不足以提升車身高度至目標(biāo)高度時,ECU控制電磁閥5和空壓機同時開啟,使儲氣罐內(nèi)氣體保持一定的壓力[7-8]。
1.2系統(tǒng)充放氣數(shù)學(xué)模型
儲氣罐與空氣彈簧進行氣體交換的過程很快,可視為定容積的絕熱放氣過程,其數(shù)學(xué)模型由變質(zhì)量系統(tǒng)熱力學(xué)第一定律得到[9]:
(1)
式中:k為絕熱系數(shù);R為氣體常數(shù);T1為儲氣罐內(nèi)的氣體溫度;qm1為放氣時的質(zhì)量流量;V1為儲氣罐容積;P1為儲氣罐絕對氣壓。
電磁閥控制質(zhì)量流量可等效抽象為節(jié)流小孔,根據(jù)節(jié)流孔上游壓力與下游壓力差,其流量公式為:
(2)
式中:A為電磁閥有效流通面積;T為對應(yīng)Pup端的氣體溫度;Pup為上游絕對氣壓;Pdn為下游絕對氣壓;qmi為充放氣質(zhì)量流量。β為臨界壓力比,β=0.528。
在充放氣過程中,空氣彈簧壓力、容積均發(fā)生變化,可視為變?nèi)莘e的絕熱充放氣過程,其動態(tài)充放氣模型為
(3)
式中:Ti(i=1,2,3,4)為4個空氣彈簧內(nèi)的氣體溫度;Pi為4個空氣彈簧絕對氣壓;Vi為4個空氣彈簧初始容積。
1.3整車動力學(xué)模型
僅分析橫向互聯(lián)空氣懸架系統(tǒng)駐車工況下的車身高度調(diào)節(jié),忽略簧下質(zhì)量及路面激勵對車身高度變化的影響,則空氣彈簧高度變化即為車身高度變化量[10]。由于轉(zhuǎn)向或載荷不均引起的側(cè)傾可通過設(shè)計主動橫向穩(wěn)定桿加以抑制。為研究方便,假設(shè)橫向互聯(lián)空氣懸架整車系統(tǒng)中同軸相互連通的空氣彈簧氣壓相等,充放氣過程中高度變化一致,側(cè)傾角變化很小,因此,不考慮側(cè)傾角將惡化車身高度調(diào)節(jié)的影響。依據(jù)車輛系統(tǒng)動力學(xué)和牛頓運動定律,建立整車車身高度調(diào)節(jié)數(shù)學(xué)模型運動方程:
式中:Mb為整車簧載質(zhì)量;Zb為車身質(zhì)心位移;Fi為4個懸架受到的作用力;Pa為大氣氣壓;Aei為4個空氣彈簧的有效面積;Mi為4個空氣彈簧處的承載質(zhì)量;g為重力加速度;Ci為4個減振器阻尼系數(shù);Zi為4個空氣彈簧處位移;Iy為關(guān)于y軸轉(zhuǎn)動慣量;θ為俯仰角;a為前軸到質(zhì)心的距離;b為后軸到質(zhì)心的距離。
2 車身高度調(diào)節(jié)控制
空氣懸架充放氣系統(tǒng)各組成部分具有較強的非線性特性,開環(huán)開關(guān)控制不僅難以實現(xiàn)車身高度的精確調(diào)節(jié),還會導(dǎo)致系統(tǒng)出現(xiàn)“過充”、“過放”現(xiàn)象。而且線性控制方法難以適應(yīng)非線性系統(tǒng)參數(shù)變化。
模糊控制以模糊語言變量規(guī)則為基礎(chǔ),詮釋非線性系統(tǒng)特性,具有良好的控制效果[11-12]。
2.1模糊控制設(shè)計
將前左、前右連通的空氣彈簧統(tǒng)一為前空氣彈簧,后左、后右連通的空氣彈簧統(tǒng)一為后空氣彈簧,其高度變化為互聯(lián)空氣彈簧之間高度變化的平均值。由于前后空氣彈簧承載量不同,以及質(zhì)量流量之間的相互影響、管路的時滯效應(yīng)也不相同,必將引起前后調(diào)節(jié)不同步,車身姿態(tài)在調(diào)節(jié)過程中嚴(yán)重惡化[13]。因此,構(gòu)建專門適用于橫向互聯(lián)空氣懸架的車身高度跟蹤控制策略。整車采用2個二維模糊控制器對前后空氣彈簧進行控制:前空氣彈簧模糊控制器以車身高度調(diào)節(jié)過程中的前空氣彈簧處實際車身高度與目標(biāo)高度的差值作為調(diào)節(jié)依據(jù);后空氣彈簧模糊控制器實時跟蹤前空氣彈簧處車身高度變化,緩和調(diào)節(jié)過程中車身姿態(tài)惡化現(xiàn)象。
圖2為設(shè)計的整車模糊高度跟蹤控制器結(jié)構(gòu)。
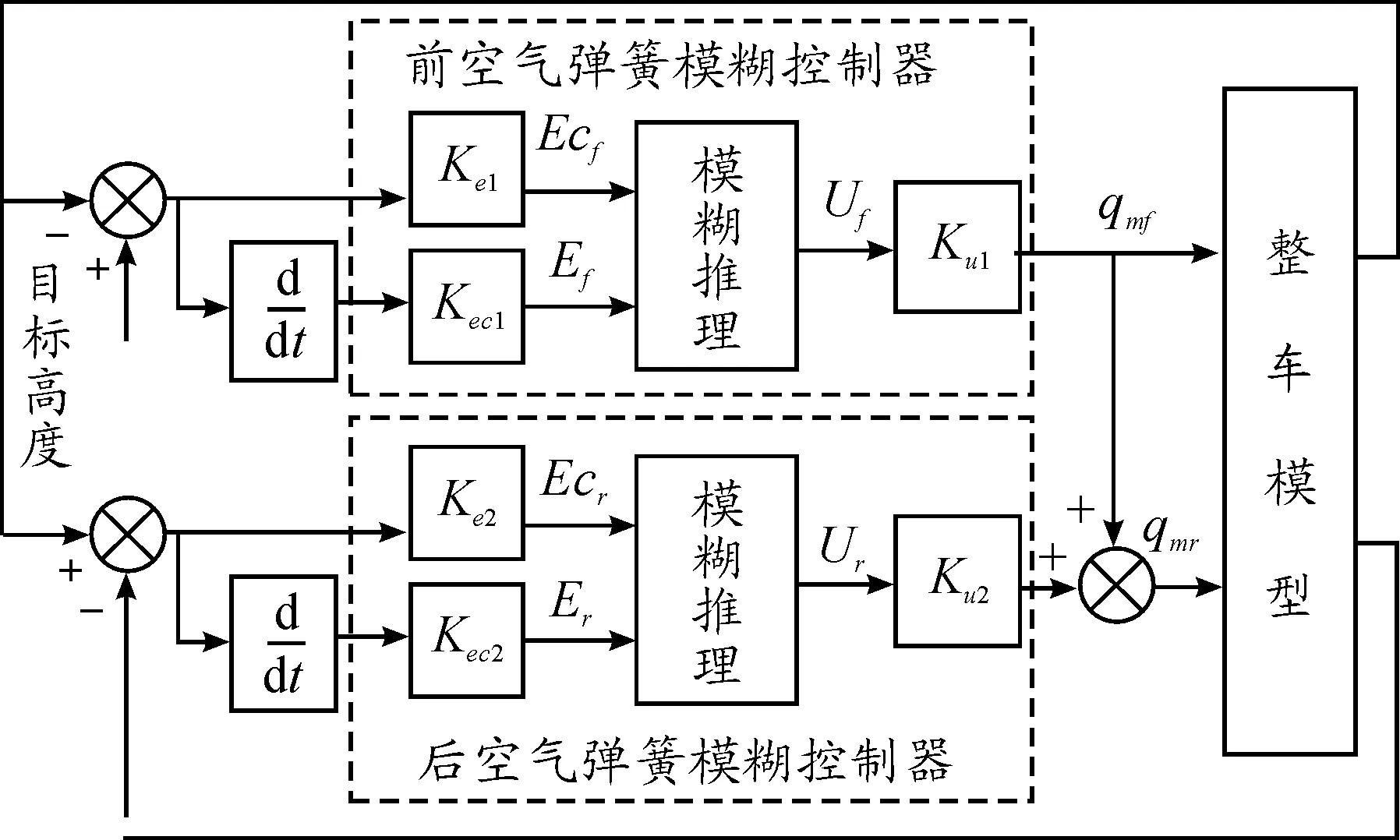
圖2 整車模糊高度跟蹤控制器結(jié)構(gòu)
圖2中Ef和ECf分別為前空氣彈簧處實際車身高度與目標(biāo)高度偏差與偏差變化率經(jīng)量化因子Ke1和Kec1模糊化后得到的輸入模糊變量,經(jīng)過模糊推理模塊后得到輸出模糊變量Uf,經(jīng)過量化因子Ku1清晰化處理后轉(zhuǎn)化為精確量質(zhì)量流量qmf;后空氣彈簧模糊化過程相同。
1) 前空氣彈簧模糊設(shè)計
前空氣彈簧處車身高度偏差及其偏差變化率的基本論域為:[-0.02,0.02]m和[-0.01,0.01]m/s,質(zhì)量流量作為輸出,基本論域為:[-1.2×10-8,1.2×10-8]m3/s。 模糊論域分別為[-6,6],[-5,5]和[-6,6]。前空氣彈簧實際車身高度作為后空氣彈簧調(diào)節(jié)的參考基準(zhǔn),應(yīng)保證較高的調(diào)節(jié)精度,模糊子集都取為:{NB,NM,NS,Z,PS,PM,PB}。同時為區(qū)分精調(diào)與粗調(diào),高度偏差小時減小模糊密度。圖3為輸入輸出隸屬度函數(shù)。
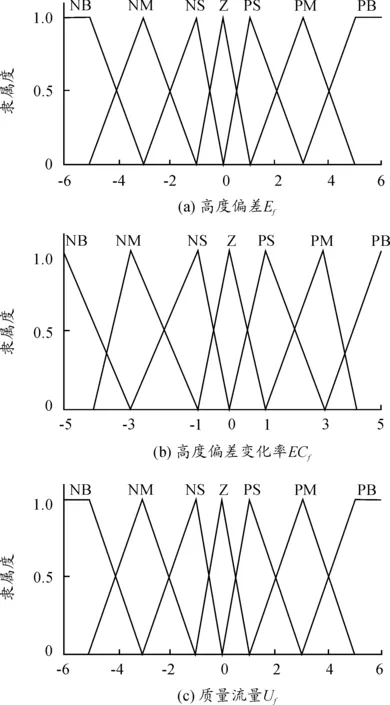
圖3 輸入輸出隸屬度函數(shù)
為實現(xiàn)車身高度的精確調(diào)節(jié),根據(jù)系統(tǒng)的工作特點,其基本原則為:高度偏差較大時,輸出較大的質(zhì)量流量,減少調(diào)節(jié)時間;高度偏差較小時,輸出較小的質(zhì)量流量,保證調(diào)節(jié)精度。輸出模糊變量Uf如表1所示。
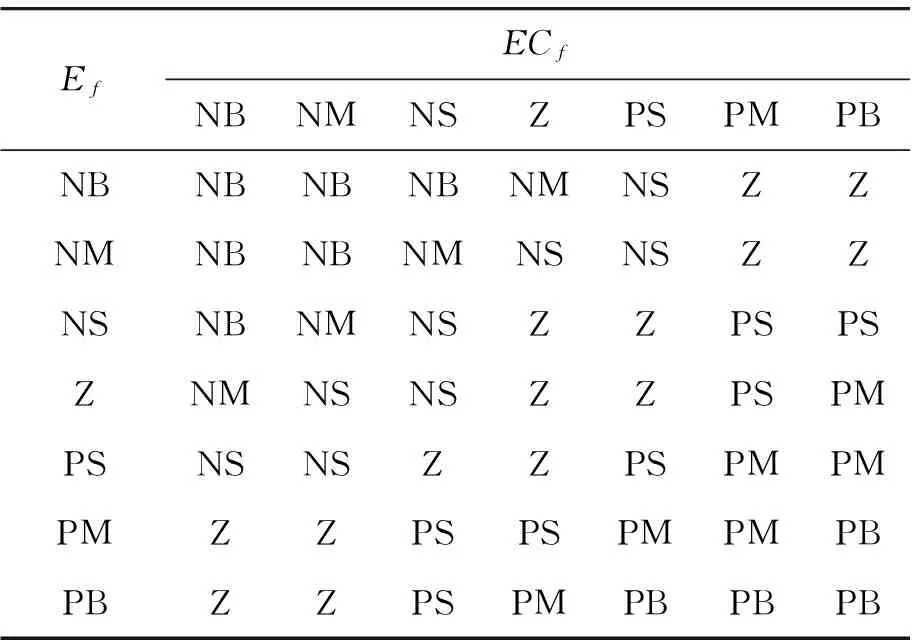
表1 輸出模糊變量Uf
2) 后空氣彈簧模糊設(shè)計
后空氣彈簧與前空氣彈簧處車身高度偏差及其偏差變化率的基本論域為:[-0.001,0.001]m和[-0.015,0.015]m/s,質(zhì)量流量作為輸出,基本論域為:[-1.2×10-8,1.2×10-8]m3/s。模糊論域分別為[-5,5],[-5,5]和[-6,6]。兼顧控制精度和計算方便,模糊子集都取5個等級,隸屬函數(shù)都為三角形。輸出模糊變量Ur如表2所示。
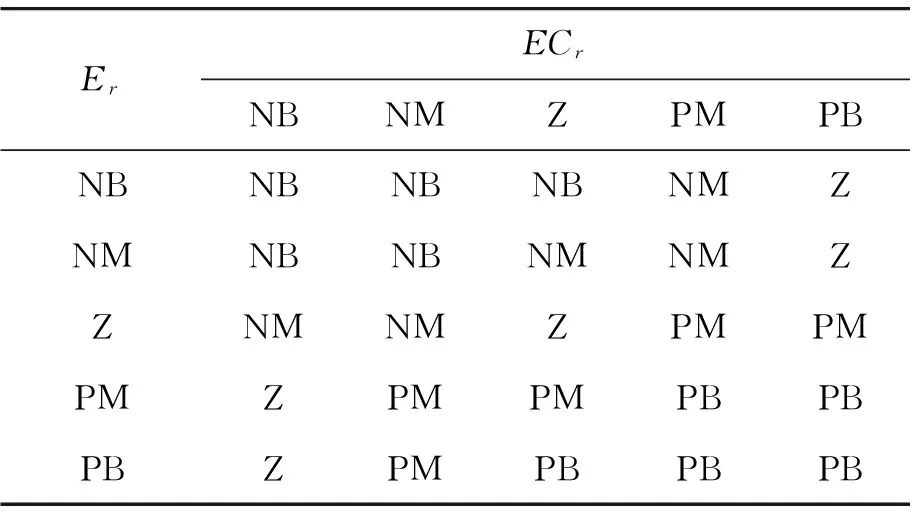
表2 輸出模糊變量Ur
2.2PWM調(diào)制的實現(xiàn)
高速開關(guān)電磁閥只能在開和閉之間進行離散切換,限制質(zhì)量流量無級可調(diào),因此,采用PWM脈寬調(diào)制方式將質(zhì)量流量大小轉(zhuǎn)化為對應(yīng)PWM占空比大小。
高速開關(guān)電磁閥靜態(tài)特性包括死區(qū),即當(dāng)控制器的輸出小于某一值時,電磁閥將不起開關(guān)作用[14]。同時設(shè)定高度死區(qū),當(dāng)高度偏差位于高度死區(qū)范圍內(nèi)時,停止車身高度調(diào)節(jié)。其中,高度死區(qū)指輸入信號變化而輸出信號沒有相應(yīng)變化的高度區(qū)間。規(guī)定調(diào)節(jié)結(jié)束后的實際高度與目標(biāo)高度偏差在2%以內(nèi)視為滿足控制要求。
車身高度模糊控制系統(tǒng)運用“Mamdani”方法,運用“max-min”進行推理,運用重心法去模糊化[15]。
3 仿真分析
基于Matlab/Simulink搭建橫向互聯(lián)空氣懸架車高調(diào)節(jié)控制系統(tǒng),對系統(tǒng)控制性能進行驗證。為對比控制器控制效果及控制精度,同時設(shè)計開環(huán)開關(guān)控制和常規(guī)PID控制器。根據(jù)文獻[16]利用Z-N法可整定得到車身高度抬升過程PID參數(shù)為:Kp= 11,Ki=0.2,Kd=1;車身高度降低過程PID參數(shù):Kp= 30,Ki=1,Kd=6。
以前空氣彈簧處車身高度變化為對象,設(shè)高度在低位(-20 mm),中位(0 mm)和高位(20 mm)三擋進行切換。仿真時間設(shè)置為10 s,仿真步長為0.01。仿真參數(shù)參考某型轎車設(shè)置,見表3。圖4為整車車高模糊仿真系統(tǒng)。
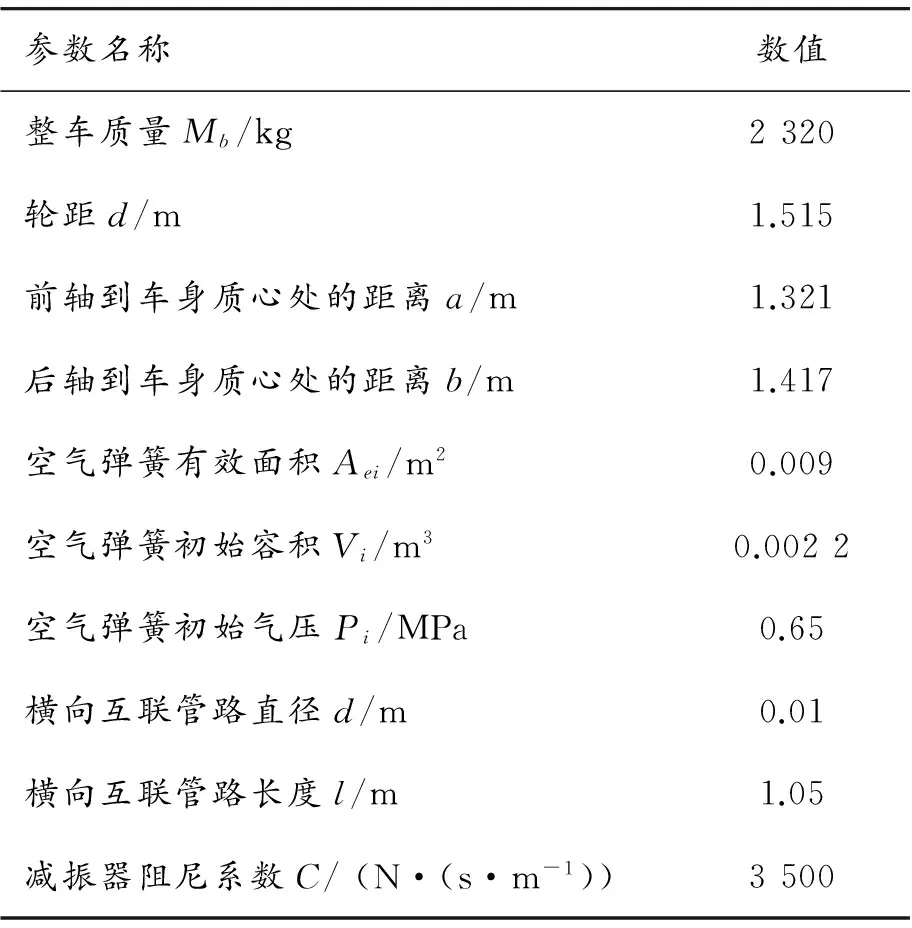
表3 整車參數(shù)
圖5中(a)和(b)為采用3種不同控制策略前空氣彈簧處車身高度在中位與高位之間的調(diào)節(jié)結(jié)果,其余高度之間的切換調(diào)節(jié)機理相同,故僅以中位和高位間的調(diào)節(jié)結(jié)果進行分析。由圖5可知:與開環(huán)開關(guān)控制相比,PID與模糊控制能有效抑制調(diào)節(jié)過程中超調(diào)明顯等問題;與PID控制相比,模糊控制下的車高動態(tài)響應(yīng)更加快速。
圖6為后空氣彈簧模糊控制器以不同參照從中位抬升至高位過程中車身俯仰角的對比曲線。由仿真結(jié)果可知:以前空彈簧處實際車身高度作為后空氣彈簧控制器輸入能有效緩解車身高度調(diào)節(jié)過程中車身姿態(tài)惡化的現(xiàn)象。
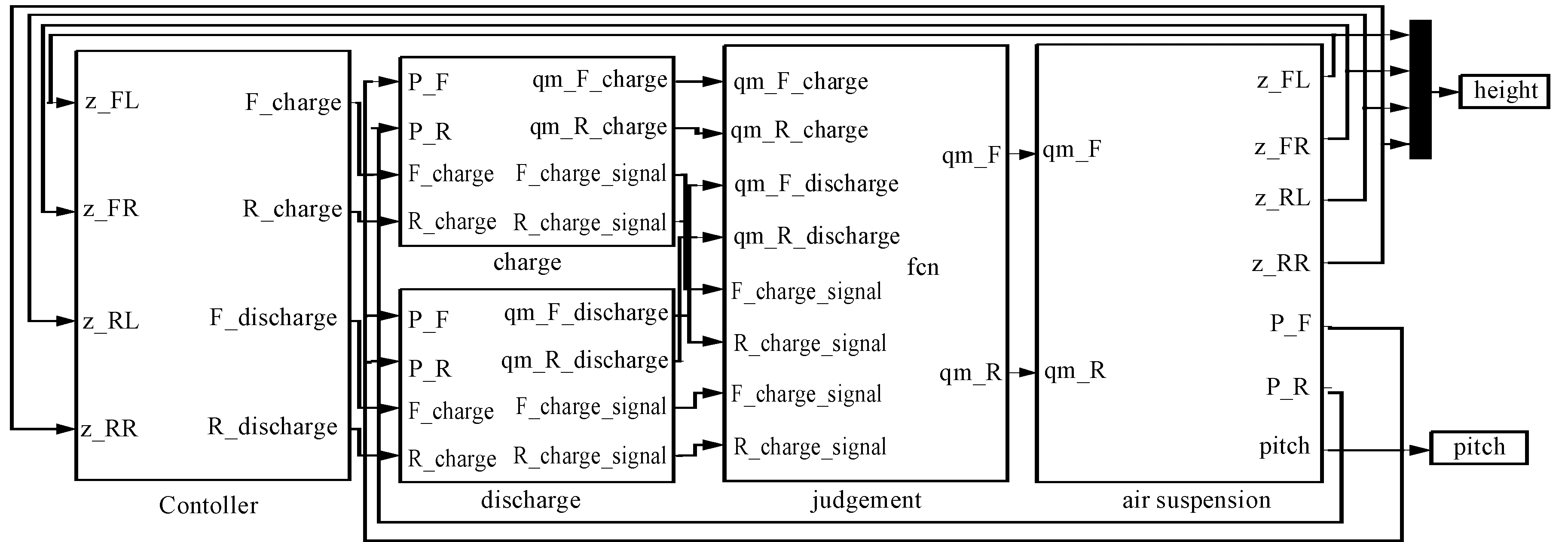
圖4 整車車高模糊仿真系統(tǒng)
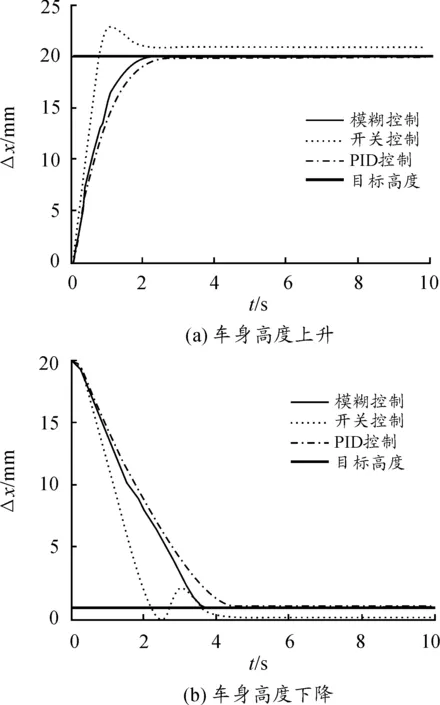
圖5 前空氣彈簧處車身高度仿真結(jié)果
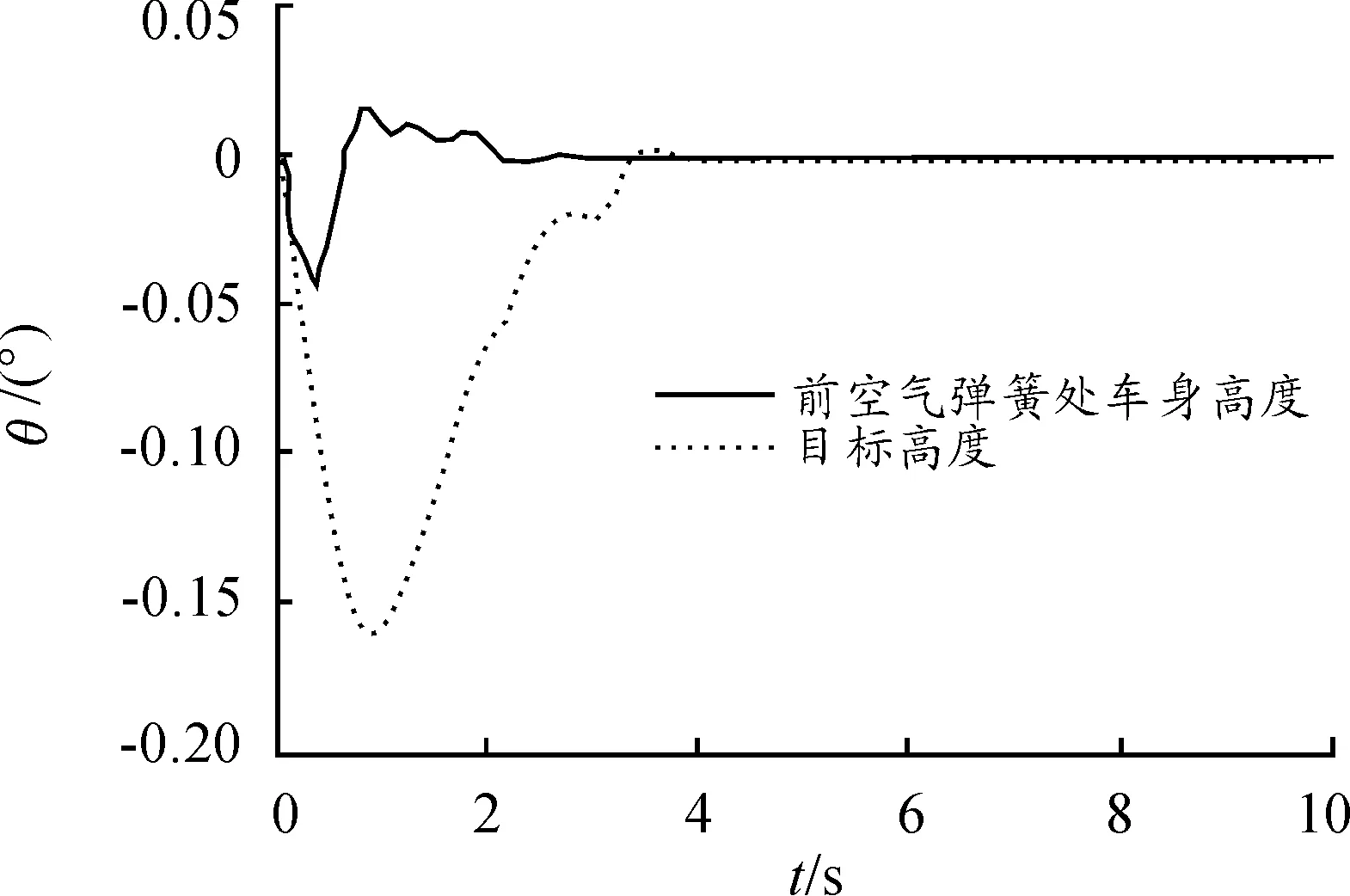
圖6 車身俯仰角對比曲線
車身高度在中位和高位之間的調(diào)節(jié)結(jié)果如圖7所示。從仿真結(jié)果可知:該模糊控制策略能快速準(zhǔn)確地將車身高度調(diào)節(jié)至目標(biāo)高度,車身姿態(tài)在調(diào)節(jié)過程中得到明顯改善,且系統(tǒng)相對穩(wěn)定。
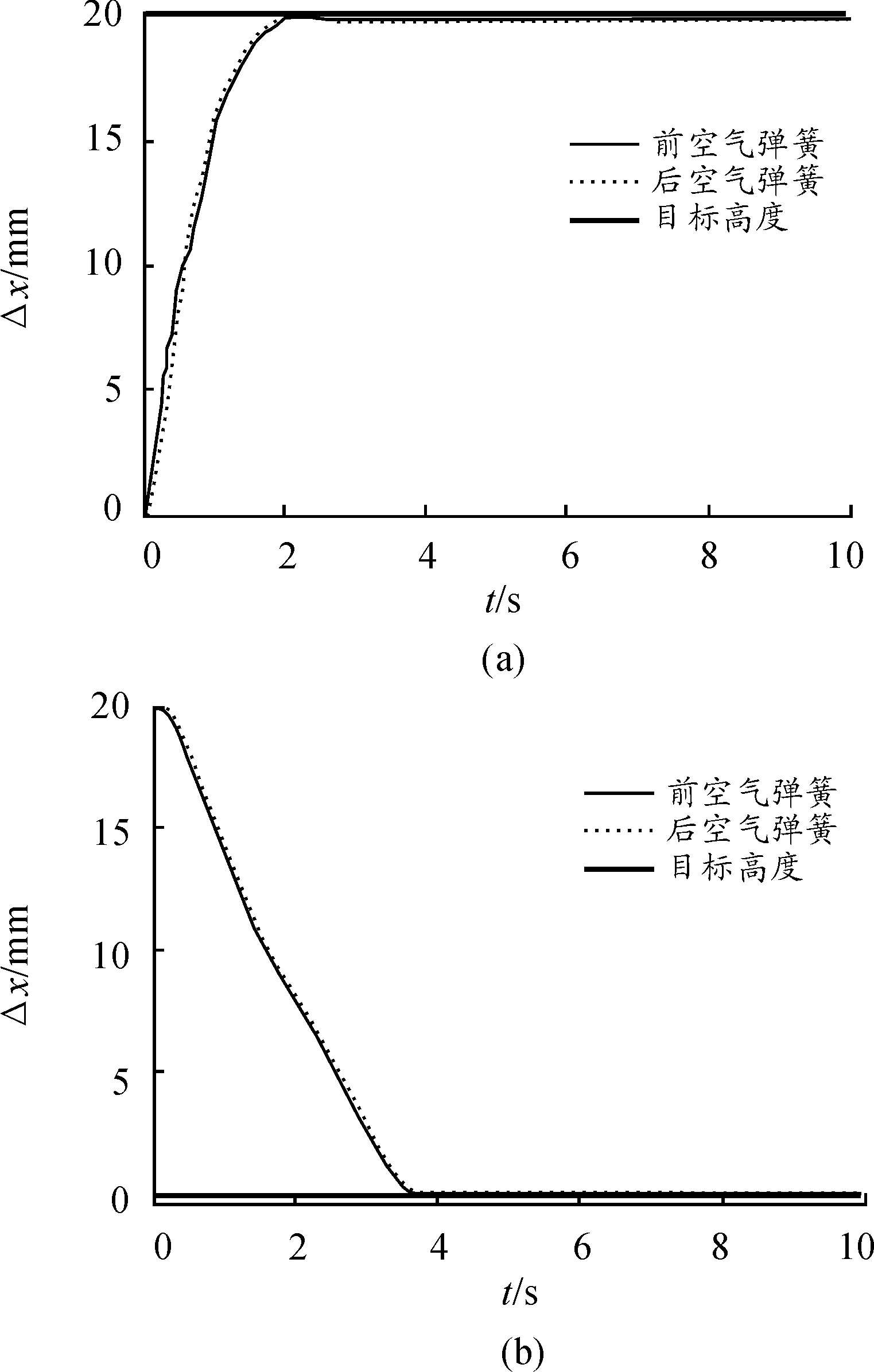
圖7 整車高度動態(tài)曲線
4 結(jié)論
1) 前空氣彈簧模糊控制器以目標(biāo)高度為基準(zhǔn),在調(diào)節(jié)過程中可保證調(diào)節(jié)精度;
2) 后空氣彈簧以前空氣彈簧處實際車身高度為基準(zhǔn),前后高度偏差逐漸減小,可提高在車身高度調(diào)節(jié)過程中車身姿態(tài)的穩(wěn)定性。
[1]黃啟科,麻友良,王保華.汽車電控空氣懸架發(fā)展與研究現(xiàn)狀綜述[J].湖北汽車工業(yè)學(xué)院學(xué)報,2013,27(2):27-33.
[2]江洪,李坤,周文濤,等.ECAS系統(tǒng)控制模式及控制策略[J].機械工程學(xué)報,2009,45(12):224-231.
[3]HYUNSUP K,HYEONGCHEOL L.Height and leveling control of automotive air suspension system using sliding mode approach[J].Vehicle Techology,IEEE Transactions on,2011,5(60):2027-2040.
[4]徐興,陳照章,黃俊明,等.電控空氣懸架充放氣的動態(tài)建模及特性仿真[J].系統(tǒng)仿真學(xué)報,2011,23(6):1225-1228.
[5]趙玉壯,王宗成,陳思忠.基于滑膜控制的空氣懸架車高控制系統(tǒng)研究[J].北京理工大學(xué)學(xué)報,2014,34(11):1125-1129.
[6]李仲興,崔振,徐興,等.互聯(lián)式空氣懸架動態(tài)特性試驗研究[J].科學(xué)技術(shù)與工程,2014,14(14):82-86.
[7]何二寶.電控閉環(huán)空氣懸架系統(tǒng)車高控制與節(jié)能研究[D].廣州:華南理工大學(xué),2012.
[8]竇輝,陳龍,汪少華,等.電控閉式空氣懸架車高調(diào)節(jié)控制研究[J].機械設(shè)計與制造,2014(9):171-174.
[9]沈維道,童鈞耕.工程熱力學(xué)[M].北京:高等教育出版社,2007.
[10]馮元元,杜群貴.半掛車電控空氣懸架車高調(diào)節(jié)模糊與PWM控制研究[J].科學(xué)技術(shù)與工程,2010,10(32):7974-7979,7992.
[11]徐興.ECAS客車車身高度非線性系統(tǒng)控制的研究[D].鎮(zhèn)江:江蘇大學(xué),2010.
[12]陳玲,佘亮,車玲玲.基于AMESim的封閉式空氣懸架系統(tǒng)車高控制研究[J].機床與液壓,2013,41(11):86-88,175.
[13]BU Wenjun,HE Lin,SHAN Shujun.Attitude control of air spring mounting system based on fuzzy control[J].International Design Engineering Technical Conferences & Computer and Information in Engineering Conference,2007(4):1-6.
[14]潘小旺,林敏,郭斌,等.氣動電磁閥動態(tài)特性仿真與試驗研究[J].中國計量學(xué)院學(xué)報,2010,21(3):232-236.
[15]范方強,潘公宇.變剛度和阻尼半主動懸架的模糊控制研究[J].重慶交通大學(xué)學(xué)報,2012,31(3):482-500.
[16]沈承,黃光宏,曹世宏,等.PID控制系統(tǒng)的參數(shù)調(diào)節(jié)技巧[J].機械工程與自動化,2008(4):155-156.
(責(zé)任編輯劉舸)
Fuzzy Control of Body Height Adjustment for Vehicles with Laterally Interconnected Air Suspension System
JU Long-yu1a,REN Shi-heng1a,ZHOU Yang-yang1b,LI Mei2
(1.a.School of Automotive and Traffic Engineering; b.School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China; 2.Mechanical and Electrical Engineering College, Hainan University, Haikou 570228, China)
In order to overcome the defect or difficulty of making full use of height adjustment due to structure characteristics of laterally interconnected air suspension, body height adjustment strategy specific for laterally interconnected air suspension was established. To solve the problem of overshoot caused by the nonlinearity and time lag of air suspension system during height adjustment, fuzzy height controllers were designed. Two two-dimensional fuzzy controllers were applied respectively to control the front and rear air springs: the input of the front controller was determined by target height which can improve the precision of adjustment, while the input of rear controller was determined by the actual body height in front air spring, thereby enhancing the stable performance problem of body posture during height adjusting. The results show that the front controller is in collaboration with the rear controller. Also, the problem of overshoot is alleviated and the body posture keeps stable.
air suspension; laterally interconnected; height adjustment; body attitude; fuzzy control
2016-02-08
國家自然科學(xué)基金資助項目 (51575241); 國家自然科學(xué)基金青年科學(xué)基金資助項目(51305111);江蘇省普通高校研究生科研創(chuàng)新計劃項目(KYLX_1058)
琚龍玉(1988—),男,河北人,博士研究生,主要從事新型空氣懸架結(jié)構(gòu)、特性與控制理論研究,E-mail:570766928@qq.com。
format:JU Long-yu,REN Shi-heng,ZHOU Yang-yang,et al.Fuzzy Control of Body Height Adjustment for Vehicles with Laterally Interconnected Air Suspension System[J].Journal of Chongqing University of Technology(Natural Science),2016(9):3-9.
10.3969/j.issn.1674-8425(z).2016.09.001
U463.33+4.2; TP272
A
1674-8425(2016)09-0003-07
引用格式:琚龍玉,任世恒,周揚揚,等.橫向互聯(lián)空氣懸架車身高度調(diào)節(jié)模糊控制[J].重慶理工大學(xué)學(xué)報(自然科學(xué)),2016(9):3-9.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32