高動態地基偽衛星接收機載波跟蹤技術
2016-10-26 09:22:55趙顯超何成龍
無線電工程 2016年10期
馬 辰,趙顯超,何成龍
(1.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081;2.空軍駐石家莊地區軍事代表,河北 石家莊 050081)
?
高動態地基偽衛星接收機載波跟蹤技術
馬辰1,趙顯超2,何成龍1
(1.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081;2.空軍駐石家莊地區軍事代表,河北 石家莊 050081)
針對地基偽衛星系統接收信號接收載噪比和頻率激勵特點,分析了三階鎖相環的載波跟蹤能力,在高動態條件和接收機接近離去偽衛星等過程中,有限的載噪比和接收信號的高階頻率激勵將導致三階鎖相環失鎖。為提高偽衛星系統接收機在高動態條件下的載波跟蹤能力,提出一種慣導/偽衛星接收機深耦合載波跟蹤方法,基于慣導輸出的高頻定位、速度信息和偽衛星位置信息估計接收信號的頻率偏移并進行補償。仿真實驗表明,接收機在不高于10 g加速度直線運動下接收鄰近偽衛星信號,深耦合算法具有相對更為穩定和精確的載波跟蹤能力。
地基偽衛星;高階頻率激勵;深耦合;頻率估計;載波跟蹤
0 引言
地基偽衛星系統的定位原理類似于衛星導航系統,接收機接收偽衛星發送的導航信號實現偽距測量并解調出偽衛星的空間位置等信息[1],在偽衛星系統和衛星導航系統間實現時間同步下,接收機基于偽衛星信號和衛星導航信號共同實現定位[2],以此來改善衛星導航信號的覆蓋性和幾何分布[3]。當偽衛星獨立組網時,接收機可直接通過不低于4個可見偽衛星信號進行定位[4],由于地基偽衛星系統服務區域小,易實現高精度時間同步和空間傳播誤差的修正[5],在位置標定下地基偽衛星的坐標誤差可控制在mm量級,因此獨立的偽衛星系統易實現高動態高精度定位,在航空標定、導航增強等方面具有巨大應用潛力。文獻[6-8]介紹了澳大利亞Locata偽衛星系統,該系統是獨立地基偽衛星系統的突出代表,可實現靜態和低動態條件下的cm級定位精度,Locata于2013年起作為美國白沙測試場標定系統組成之一展開了飛行測試[9],表明其可在飛行動態條件下達到15~20 cm定位精度。在高動態接收機定位方面,相關研究主要集中于GNSS接收跟蹤方法和偽衛星信號捕獲方法等,而針對于地基偽衛星系統特點的信號跟蹤算法方面的研究相對較為缺乏。本文針對偽衛星信號跟蹤中的高階頻率激勵提出一種基于慣導輔助的環路跟蹤技術,提升了偽衛星接收機在偽衛星服務區域內的穩定連續定位能力。
1 地基偽衛星系統特點
地基偽衛星系統本質上是一種借鑒了衛星導航定位技術的區域地基無線電導航系統。系統采用了載波相位測量等類似衛星導航的測距技術,但其信號傳播環境貼近地面且服務區域有限,因此在信號接收和跟蹤方面具備獨有的特點。
1.1信號載噪比
對于一種具有區域獨立頻段的地基偽衛星系統,為提高信號的抗噪聲性能采用高信號發射功率,因此在連續信號體制下信號主要受系統內多址干擾的影響。對于高動態目標,多址干擾近似為白噪聲,在由N個地基偽衛星構成的系統內,若在遠近效應下允許的功率比上限為20 dB,全部信號均在遠近效應允許范圍內,則接收信號C/N0的極值為[10]:
(1)
式中,K為偽碼周期;N0,p為不存在多址下的背景噪聲強度,且有C/N0,p>>0。若取K為2 046,N為10,則得到接收信號C/N0的極值分別為8.3 dB和48.3 dB。
為提高信號的C/N0可采用脈沖調制或跳時調制來降低系統內干擾,其中脈沖調制并不影響信號跟蹤的實時性,但由于碰撞和相關性損失帶來的提升通常不高于6 dB;跳時最大程度降低了信號間干擾,并可通過提高帶寬降低跳時周期來改善定位實時性,在強功率發射下其C/N0最小值仍可達到40 dB以上。
1.2預檢相干積分周期
在地面固定安裝和區域定位條件下,地基偽衛星系統大部分定位所需的信息為恒定或慢變量[11],允許采用更多的電文資源來傳遞用于定位修正的快變量來滿足高動態和高精度的定位需求[12],這一特點使得偽衛星系統可采用更高的電文速率和更為靈活的編排設計,以此提高接收機信號積分處理周期以獲取更高的信噪比[13],例如對于跳時偽衛星系統,通過電文編排和跳時圖案設計,接收機預檢相干積分周期可達到20~100 ms,并以此支持高動態條件下不低于10 Hz的定位更新率[14]。
需要指出的是,在連續信號的偽衛星系統中,信號間多址干擾為:

(2)
式中,Di、PNi、τi分別為第i路信號的電文、偽碼序列和碼片延遲;φi,j為2路信號載波相位差在積分周期內的等效均值;TS為偽碼周期。當電文不發生翻轉且信號間相對載波相位差變化率變化不大時,滿足
M(nTS)≈M(mTS),?n,m∈Z。
(3)
即隨著積分時間的增加多址干擾和信號功率近似同倍增長。因此,對于連續信號偽衛星系統,通過降低電文速率增加預檢相干積分時間對信噪比的改善程度相對有限。
1.3接收機頻率激勵
高動態下接收機載波環會受到多個不同階數的頻率激勵。若接收機瞬時速率為v,運動方向和偽衛星信號接收矢量夾角為θ,徑向速率為vd,和偽衛星距離為L,則信號多普勒頻移及其泰勒級數形式為:
(4)
對于衛星導航系統,在不計衛星運動的多普勒分量下,由于L>>v,Δf≈fvcos(θ)/c,因此多普勒主要由速度及其各階導數確定,對于不考慮加加速度的高動態條件,接收機僅受到不高于二次方的相位變化激勵。
而對于地基偽衛星系統,由于L/v有限,高動態條件下參數θ的變化率大,導致徑向速度vd和速率v間的各階變化率比例不恒定,進而可造成低階速率變化導致高階徑向速率的變化。根據式(4),多普勒的一階和二階變化率分別為:
(5)
因此,在地基偽衛星系統中簡單的加速直線運動也將引起二階甚至更高階的多普勒變化,這將使得面向衛星導航定位的跟蹤環路設計并不適用于偽衛星系統。
2 三階鎖相環動態適應力
典型三階鎖相環的保守穩定跟蹤條件為滿足相位測量誤差均方差不超過鑒相牽引范圍的1/3,即測量相位抖動均方差σi和動態應力下的穩態跟蹤誤差θe滿足:

(6)
式中,σtPLL為環路熱噪聲均方差;σv為基準頻率振蕩應力抖動均方差;σA為阿倫方差抖動均方差。σtPLL和θe的計算公式為:
(7)
式中,BL為環路噪聲帶寬;Tcoh為環路預檢相干積分時間。對于連續偽衛星系統中遠近效應邊沿區域,即C/N0=8.3dB,Tcoh=20 ms,當BL=1Hz時可得到σtPLL=47.8°。因此連續偽衛星系統中若直接基于三階鎖相環,即使接收機在靜態下也難以保證在強遠近效應區域內維持載波跟蹤。
對于跳時偽衛星系統或連續偽衛星中的低多址干擾區域,暫時σv和σA對跟蹤環路的影響,若相干積分時間Tcoh=100ms,可得到

(8)
在1.5 GHz中心頻率下,25~50 dBHz載噪比對應的應力門限如圖1所示。
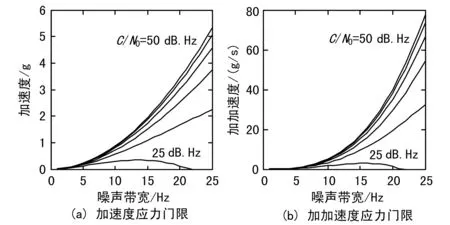
圖1 不同載噪比下的應力門限
因此對于地基偽衛星系統,在采用三階鎖相環下所對應的最大加速度約為5.5 g,最大加加速度約為80 g/s,并不能適應高動態環境。
此外,根據式(5),地基偽衛星接收機的運動將導致高階次的頻率激勵。例如與以10 g加速度、100 m/s初速直線運動的接收機,其接收初始距離1.12 km、最近距離500 m的偽衛星信號的各階多普勒變化率如圖2所示。
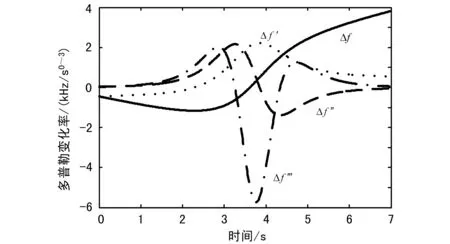
圖2 直線加速運動對應各階多普勒變化率
圖中顯示了7 s內的多普勒變化,在3~5 s內由于鄰近偽衛星各階變化率均發生較大變化,并且明顯存在更高階的多普勒激勵;在7 s后二階及更高階頻率激勵收斂為0并趨于平穩。根據鎖相環特性,三階鎖相環在二階多普勒頻率激勵下將產生跟蹤偏差θe,而在更高階頻率激勵下將導致跟蹤失敗,因此在臨近偽衛星的時段內三階鎖相環不僅引入了跟蹤誤差,而且在部分時段將發生失鎖,對于多偽衛星構成的區域導航系統,將難以保證服務區域和高動態條件下對信號的穩定跟蹤。
3 高動態偽衛星載波跟蹤方法
實現高動態條件下對偽衛星信號載波穩定和精確跟蹤的方法包括兩大類:①以地基偽衛星系統為出發點,通過系統信號優化設計提高載噪比和噪聲帶寬上限,并通過合理的布設降低接收機受高階頻率激勵的概率;②為提高接收機對瞬時頻率變化的感知能力,實時精確調整接收機本地載波實現與接收信號的跟隨。
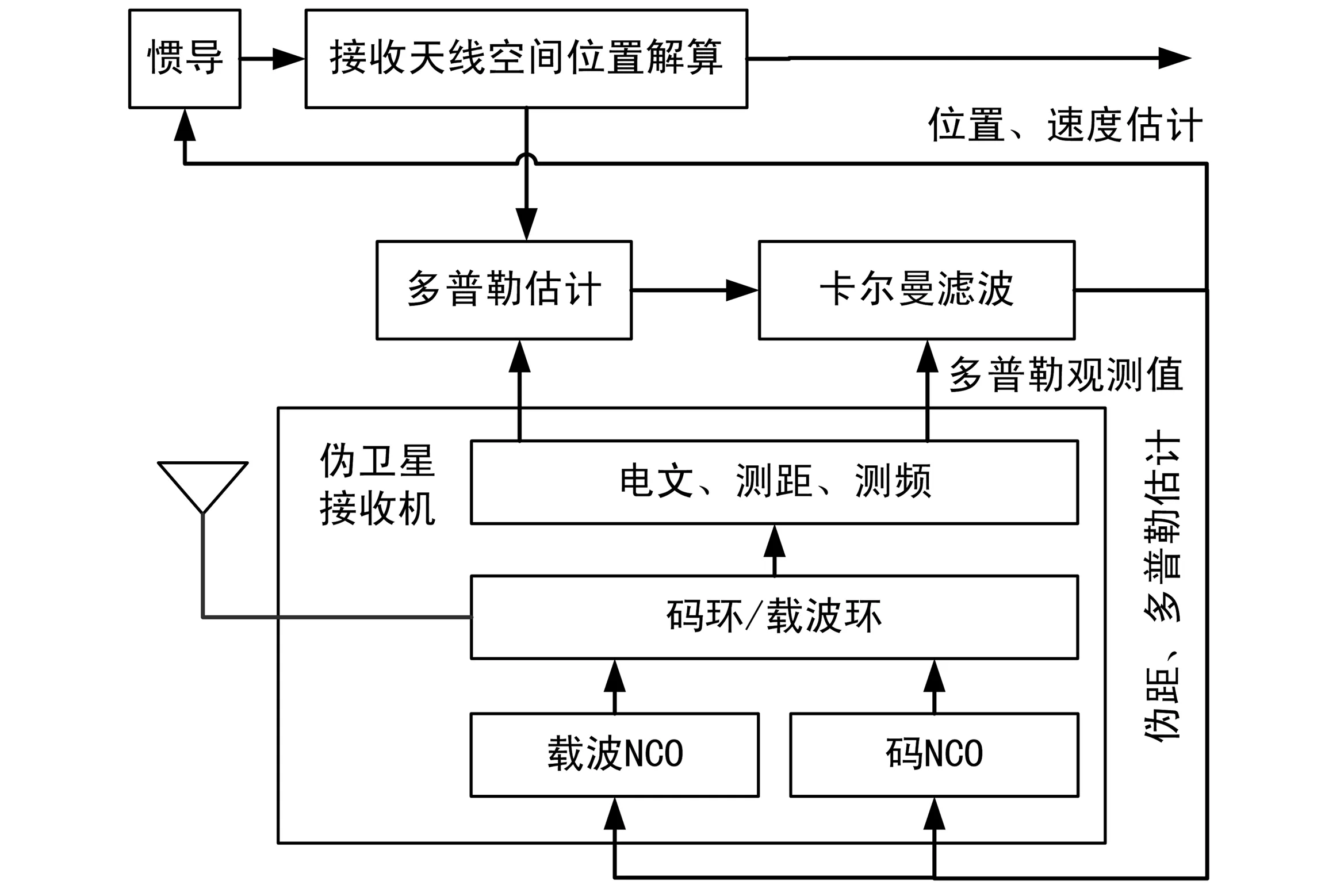
圖3 INS/偽衛星接收機耦合結構
針對第2類方法在此提出基于慣導傳感器輔助的INS/偽衛星深耦合載波跟蹤方法。將INS與偽衛星輸出的多普勒和偽距的觀測數據、預測數據進行融合,并將融合測量值反饋給接收機跟蹤環路用以準確預測頻率變化來調整本地載波頻率。由于INS的數據更新速率可達到數百赫茲,對偽衛星系統中高階多普勒變化的跟隨能力遠高于普通鎖相環;此外精確的頻率跟蹤允許采用更低的環路噪聲帶寬,從而獲得更高的偽距測量精度,因此深耦合易實現偽衛星接收機的高動態和高精度定位性能。卡爾曼濾波的狀態和量測方程分別為:
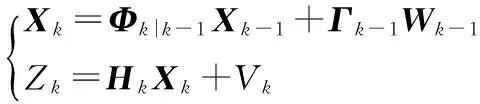
(9)
式中,Xk為誤差狀態矢量,除慣導自身誤差量集合外,還包含了鐘差Δt和多普勒頻移Δf;Φk|k-1為狀態轉移矩陣;Wk-1為系統噪聲矢量;Γk-1為噪聲轉移矩陣;Zk為觀測偽距變化量;Hk為量測矩陣;Vk為量測噪聲。

(10)
若定位和測速估計誤差分別為δIP和δIv,則多普勒估計誤差為:
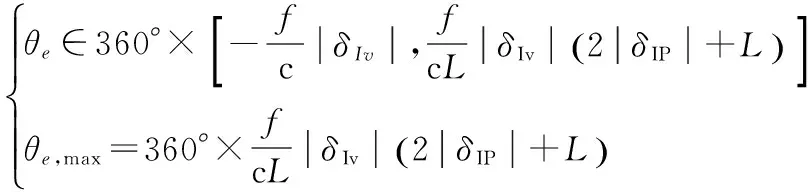
(11)

(12)
4 算法性能仿真結果分析
對偽衛星系統定位中的定位性能進行對比。仿真中取三階鎖相環傳遞函數為:
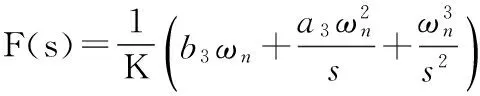
(13)

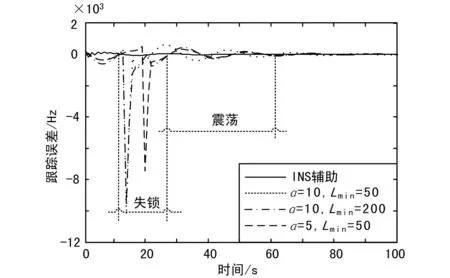
圖4 頻率跟蹤誤差對比
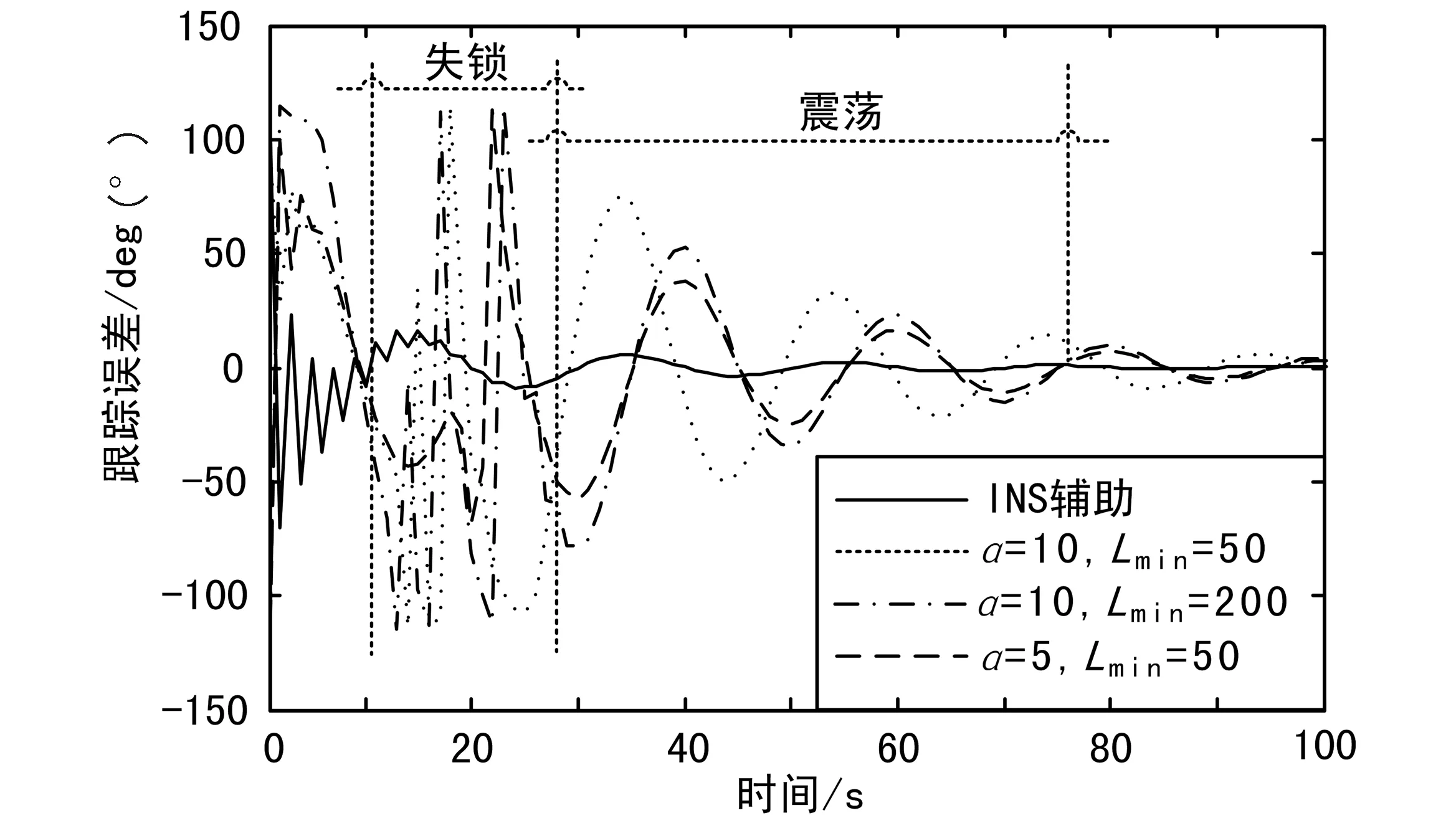
圖5 相位跟蹤誤差對比
由圖4和圖5可知,在接收機接近和遠離偽衛星的過程內,由于存在高階頻率激勵分量,仿真中三階鎖相環出現了5~6 s的失鎖時間,且在之后的數十秒內存在頻率震蕩過程。而基于INS輔助的鎖相環相對具有更好的頻率跟蹤性能,特別是在整個接近離去過程中基本未受到高階頻率激勵的影響,也具有相對更優的載波跟蹤精度。
5 結束語
本文綜合分析了偽衛星定位系統載噪比和頻率激勵特點,提出了一種基于INS輔助的偽衛星信號載波跟蹤算法,經實驗驗證表明:
① 加速直線運動的接收機在靠近離去偽衛星過程中存在三階以上高階頻率激勵,這些頻率激勵在臨近偽衛星時最為嚴重,離去偽衛星后高階分量逐漸收斂為0;
② 三階鎖相環在接收機靠近離去偽衛星過程中存在失鎖和震蕩過程,在設置的仿真場景中,失鎖過程持續5~6 s;
③ 基于INS輔助的載波跟蹤算法對頻率進行了實時估計和調整,未明顯受到高階頻率激勵的影響。
本文提出的算法主要針對于位置信息可確知的地基偽衛星;對于動態偽衛星,偽衛星實時位置和速度估計誤差將影響頻率估計精度,需要進一步提高環路跟蹤算法抗高階頻率激勵能力。
[1]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:116.
[2]KAPLANE D,HEGARTY C J.GPS原理與應用[M].北京:電子工業出版社,2007:337.
[3]COBB H S.GPS Pseudolites:Theory,Design,and Applications[D].USA:Stanford University,1997.
[4]張春海,何成龍,王垚.基于蜂窩構型的空基偽衛星定位網絡[J].無線電工程,2012,42(10):1-3.
[5]何成龍,王垚.地基偽衛星信號發射分集技術研究[J].無線電工程,2013,43(6):22-25.
[6]CHEONGJ W.Signal Processing and Collective Detection for Locata Positioning System[D].Australia:University of New South Wales,2012.
[7]BARNES J,RIZOS C,KANLI M,et al.A Positioning Technology for Classically Difficult GNSS Environments from Locata[C]∥Position,Location and Navigation Symposium,2006 ION,USA,2006:715-721.
[8]RIZOS C,ROBERTS G,BARNES J,et al.Experimental Results of Locata:A High Accuracy Indoor Positioning System[C]∥Indoor Positioning and Indoor Navigation,Switzerland,2010.
[9]TRUNZO A,BENSHOOF P,AMT J.The UHARS Non-GPS Based Positioning System[C]∥Meeting of the Satellite Division of the U.S.,USA,2011:3 582-3 586.
[10]PURSLEYM B.Performance Evaluation for Phase-Coded Spread-Spectrum Multiple-Access Communication-Part I:System Analysis[J].IEEE Transactions on Communications,1977,25(8):795-799.
[11]BARNES J,RIZOS C,WANG J,et al.Locata:the Positioning Technology of the Future[C]∥6th International Symposium on Satellite Navigation Technology Including Mobile Positioning & Location Services,Melbourne,Australia,2003:49.
[12]BARNES J,RIZOS C,WANG J,et al.The Development of a GPS/Pseudolite Positioning System for Vehicle Tracking at BHP Steel[C]∥15th International Technical Meeting of the Satellite Division of The Institute of Navigation ION GPS,Portland:Port Kembla Steelworks,2002:1 779-1 789.
[13]BARNES J,WANG J,RIZOS C,et al.The Performance of a Pseudolite-based Positioning System for Deformation Monitoring[C]∥2nd Symp.on Geodesy for Geotechnical & Structural Applications,Berlin,2002:326-327.
[14]DAI L,RIZOS C,WANG J.The Role of Pseudosatellite Signals in Precise GPS-based Positioning[J].Journal of Geospatial Engineering,2001,3(1):33-44.
馬辰女,(1989—),在讀工程碩士,助理工程師。主要研究方向:計算機技術。
趙顯超男,(1980—),碩士,工程師。主要研究方向:航空彈藥。
Research of Carrier Tracking Technology for High Dynamic Terrestrial Pseudolite Receiver
MA Chen1,ZHAO Xian-chao2,HE Cheng-long1
(1.StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China;2.MilitaryRepresentativeOfficeofPLAAirForceStationedinShijiazhuangRegion,ShijiazhuangHebei050081,China)
Considering the characteristics of terrestrial pseudolite receiver in terms of CNR(Carrier to Noise Ratio)and frequency excitation when receiving signal,the analysis of the carrier tracking performance of third order PLL is made,it might suffer from loss of lock due to the limited CNR and the high-order frequency excitation of received signal.To improve the carrier tracking performance of pseudolite receiver under a high dynamic condition,an INS/pseudolite deeply coupled carrier tracking approach is proposed which can estimate and compensate the frequency offset of received signal based on the high-frequency positioning and velocity information provided by the INS and the pseudolite position information.A simulation experiment shows that this deeply coupled algorithm behaves more stable and accurate carrier tracking performance when the receiver moving in a rectilinear motion at an acceleration of no more than 10 g attempts to receive signals from pseudolites nearby.
terrestrial pseudolite;high-order frequency excitation;deeply coupled;frequency estimation;carrier tracking
10.3969/j.issn.1003-3106.2016.10.10
2016-06-28
河北省科技計劃基金資助項目(14210312D,15210801D)。
TP391.4
A
1003-3106(2016)10-0043-04
引用格式:馬辰,趙顯超,何成龍.高動態地基偽衛星接收機載波跟蹤技術[J].無線電工程,2016,46(10):43-46,82.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
