水面艦艇目標融合識別過程模型分析*
2016-10-25 07:21:33黃力偉
艦船電子工程 2016年9期
李 軍 黃力偉
(海軍大連艦艇學院 大連 116018)
?
水面艦艇目標融合識別過程模型分析*
李軍黃力偉
(海軍大連艦艇學院大連116018)
如何利用水面艦艇裝備的傳感器準確及時地識別目標是取得海戰勝利的關鍵,論文在研究數據融合的基礎上,分析了水面艦艇傳感器的劃分及水面艦艇的目標分類,提出了一種水面艦艇目標融合識別模型,該模型的傳感器子系統在利用水面艦艇裝備的傳感器獲取目標信息的基礎上,提取目標特征信息,并根據目標特征信息的輸入獨立判定目標類型,最后在模型的融合識別中心對各子系統的識別結果進行融合以確定目標的最終身份。
數據融合;目標識別;特征信息
Class NumberTP391.41
1 引言
在現代海戰中信息來源廣泛、信息形式多種多樣,如何有效可靠地利用各種信息識別目標是克敵制勝的關鍵,雖然水面艦艇可以根據指揮中心提供的情報信息確定敵人的兵力調動和兵力組成,但是由于欺騙、干擾等一系列手段的運用,僅僅依靠情報信息判斷目標類型是遠遠不夠的,過去進行目標識別的人工方式已經不能滿足高技術條件下的海戰需要。為了有效綜合利用信息源獲得的信息對目標進行識別,下面在水面艦艇提取目標多特征的基礎上,提出一種水面艦艇目標識別模型,從而采集、提取、融合目標的特征信息[1],以增強目標識別的可靠性和準確性。
2 數據融合層次
在多傳感器數據融合過程中,由于融合數據的類型、傳感器采集數據的方式和工程需要的不同,需要對數據分層次有步驟地進行融合。根據數據抽象層次和數據流通方式的不同,可以把數據融合劃分為像素級融合、特征級融合和決策級融合[2]三個層次。
2.1像素級融合
像素級融合也被稱為低級融合,是直接對各種傳感器采樣的原始數據進行融合操作。它的優點是能保持盡可能多的現場數據,由于信息損失較小,因此較其他融合層次能提供細微的信息。但是存在很明顯的局限性:由于要融合的數據是經過很少加工甚至未經過加工的,因此計算量很大,這就對計算機的容量和速度提出了很高的要求,并且由于處理時間較長,導致實時性差;而且此種融合是在信息的最低層進行的,因此在沒有糾錯處理的情況下,融合不確定性、不完全性和不穩定性的原始數據會產生較大的誤差;要求各個傳感器采樣的數據之間有精確到一個像素的很高的校準精度,故各個傳感器必須為同質的;數據通行量大,抗干擾能力差。
像素級融合的方法主要有[3]:極大似然估計、最小二乘法、HIS變換、PCA變換、小波變換及加權平均等。
2.2特征級融合
特征級融合也被稱為中級融合,它將傳感器所傳遞的信息進行特征提取,隨后對提取的特征信息進行綜合處理。一般而言,特征信息是能表征像素信息的充分表示量或者統計量,然后以特征信息為基礎對傳感器數據進行分類、匯集和綜合。由于特征級融合實現了一定程度的信息壓縮,因此能較好地進行實時處理,并且一般所提取的特征信息都與決策分析有聯系,因而融合結果能充分反映與決策分析相關的特征信息。
特征級融合的方法主要有[4]:聚類分析法、貝葉斯估計法、信息熵法等。
2.3決策級融合
決策級融是為指揮決策提供依據的高級融合,在特征級融合提供的各類特征信息的基礎上,它采用融合技術解決具體的決策問題。作為三級融合的最后結果,它直接針對決策目標,影響指揮決策水平。它的主要優點有:在一個或者幾個傳感器發生錯誤時,通過適當的融合依然能得出正確的結果;處理信息量小,抗干擾能力強;構成系統的傳感器可以是同質的也可以是異質的;系統對通信帶寬要求不高。缺點是:由于要對各個傳感器信息進行預處理,以獲得各傳感器的判定結果,因此代價比較高,并且信息損失量在三級融合中最大。
決策級融合的方法主要有[5]:專家系統、神經網路法、模糊集理論、可靠性理論以及邏輯模板法等。
3 水面艦艇傳感器分類
按照艦艇上傳感器工作機制不同,把水面艦艇裝備的傳感器分為四大類:艦載雷達、艦載聲納、艦載光電探測設備和艦載電子偵察設備[6],現分別介紹如下。
3.1艦載雷達
雷達是指用無線電方法對目標進行探測和測距。雷達的基本任務有兩個,一是發現目標的存在,二是測量目標的參數,前者稱為雷達檢測,后者稱為雷達參數提取或雷達參數估值。當雷達探測到目標后,就要從目標回波中提取有關信息,主要信息有:目標的空間位置—斜距和角度信息;目標位置的變化率—相對速度;加速度;目標回波的幅度起伏特性;極化特性;類型;敵我屬性;目標的尺寸和形狀;采用不同的極化可測量目標形狀的對稱性;原理上雷達還可測定目標的表面粗糙度及介電特性等。
而所謂艦載雷達是對裝備在艦艇上的各種雷達的總稱,亦稱艦艇雷達。用于探測和跟蹤海面、空中目標,為武器系統提供目標坐標等數據,引導艦載機飛行和著艦,保障艦艇安全航行和戰術機動等。按其戰術用途分為艦載搜索雷達、艦載火控雷達、航海雷達、艦載對空引導雷達和艦載多功能雷達等。
3.2艦載聲納
聲納是利用水下聲波判斷海洋中物體的存在、位置及類型的方法和設備。近年來,人們更將聲納的含義加以推廣,以致凡是利用水下聲波作為傳播媒體,以達到某種目的的設備和方法都稱之為聲納。然而人們更習慣于將聲納理解為具體的設備,因而凡是用聲波對水下目標進行探測、定位、跟蹤、識別,以及利用水下聲波進行通信、導航、制導、武器的射擊指揮和對抗等方面的水聲設備皆屬聲納這一范疇。當聲納對目標參數進行測量時,按照聲納工作方式的不同(主動與被動兩類)可以把被測參數劃分為兩類,其中主動聲納從目標回波中提取下列信息:目標的空間位置—斜距和角度信息;目標位置的變化率—相對速度;加速度;目標回波的幅度起伏特性[7];類型;目標的亮點數量;目標的尺寸和形狀等,被動聲納從目標的輻射噪聲中提取如下信息:目標的軸頻、目標的初始發現距離、輻射噪聲的線譜特征、時域波形結構特征及平均功率譜特征等。
而所謂艦載聲納是對裝備在艦艇上的各種聲納的總稱。用于探測和跟蹤海面、水下目標,為武器系統提供目標坐標等數據,保障艦艇安全航行和戰術機動等。按其戰術用途分為警戒聲納、攻擊聲納、探雷聲納、導航聲納、通信聲納、偵察聲納和識別聲納等。
3.3艦載光電探測設備
光電裝備以光電子技術為主要技術基礎[8]。由于光電子學和半導體工藝的發展,生產出多種光電觀測裝備和器材,如:激光測距儀、激光雷達、紅外熱像儀、紅外跟蹤儀、電視跟蹤儀、激光電視……等。而所謂艦載光電探測設備是對裝備在艦艇上的各種光電設備的總稱,主要有艦載紅外警戒系統、艦用激光測距儀和艦載電視跟蹤器。
3.4艦載電子偵察設備
電子偵察就是使用電子偵察設備對空中輻射的電磁信號進行搜索、截獲、分選、分析和識別以及輻射源定位,以掌握對方輻射源的技術特性、威脅程度和兵力部署變動等情報的一種電子技術。針對水面艦艇而言,按截獲信號的不同可分為雷達偵察設備、通信偵察設備、光電偵察設備和水聲偵察設備。
4 水面艦艇目標分類
水面艦艇的目標分類問題一直是研究的重點和難點,分類的好壞直接關系目標識別的精確度和融合結果的準確性。按照水面艦艇識別目標的空間分布,可以把待識別目標劃分為:空中目標、海上目標和水下目標三個大類。
結合表1中各類型傳感器提取的目標特征,可以把水面艦艇目標分類細化如下:
空中目標為:大中型轟炸機、戰斗機、偵察機、預警機、大中型運輸機、大中型客機、普通飛機、直升機、導彈、鳥群。
海面目標為:航空母艦、巡洋艦、驅逐艦、護衛艦、登陸艦、掃雷艦、巡邏艇、大中型軍輔船、漁船、水面快艇、大中型商船、普通小船。
水下目標為:核潛艇、常規潛艇、水下探測器、魚雷、魚群。
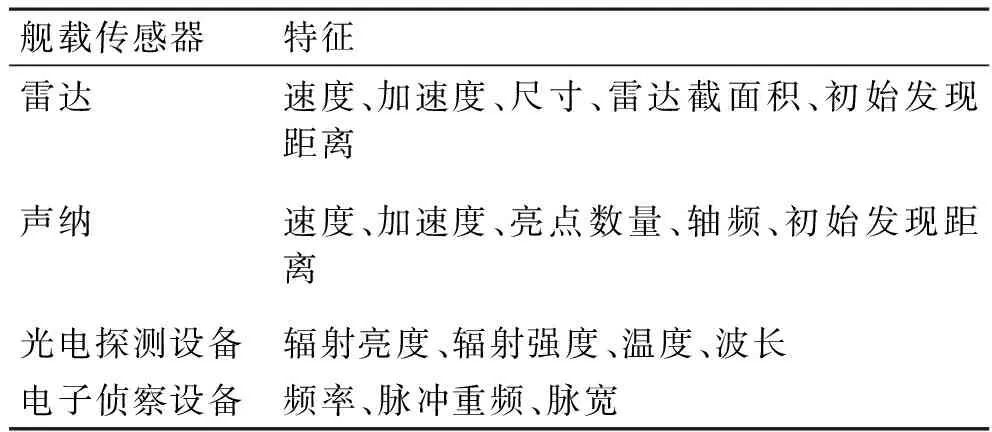
表1
5 水面艦艇目標識別過程模型
在水面艦艇目標識別中,獲得的目標特征信息是多種多樣的,提取的特征也各不相同,并且這些特征信息時常是有缺失的。因此,在水面艦艇目標融合識別中,常采用決策級融合模型。它在部分傳感器系統無法工作的情況下依然具有較強的識別能力,為了清楚地說明水面艦艇目標識別的流程和各組成部分的功能,如圖1所示,介紹一種決策級水面艦艇目標識別模型。在此模型中,主要包括預處理、特征提取、獨立識別、決策融合四個部分[9],現對各部分功能作如下介紹。

圖1 水面艦艇目標融合識別過程模型
5.1預處理
預處理是對原始的目標信號進行收集和處理以提高信號的信噪比。它由水面艦艇雷達系統、水面艦艇聲納系統、水面艦艇光電系統和水面艦艇電子偵察系統四個部分構成,為了了解它的工作流程,以水面艦艇雷達系統為例,如圖2所示,水面艦艇裝備的雷達對目標進行探測并接收原始的目標信號,為了提高后續處理的信噪比,需要對原始目標信號進行時域積累,最后用數據級融合算法對時域積累后的信號進行處理,以提高融合信號的準確性和精度。預處理過程在提高整個系統的精確性的同時增強了系統的抗干擾能力。
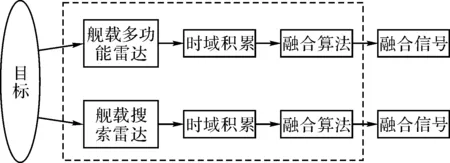
圖2 水面艦艇雷達系統
5.2特征提取
四個特征提取子系統獨立地從目標環境中提取目標的屬性特征和運動特質[10]。
雷達特征提取子系統主要處理目標的雷達回波信號,從而提取目標的速度、加速度、高度、雷達截面積、尺寸、初始發現距離等作為識別目標的特征。
聲納特征提取子系統主要處理目標的聲納回波信號以及目標的輻射噪聲,從而提取目標速度、深度、亮點數量、軸頻、初始發現距離等作為識別目標的特征。
光電特征提取子系統主要處理目標的紅外輻射信號,從而提取目標的輻射亮度、輻射強度、溫度、波長等作為識別目標的特征。
電子偵察特征提取子系統主要以被動形接收目標所產生的信號(包括雷達信號、聲納信號和紅外信號),從而提取目標信號的頻率、脈沖重頻、脈寬等作為識別目標的特征。
5.3獨立識別
四個獨立識別子系統獨立地根據目標特征信息輸入對目標的類型進行識別。這里的識別方法有模糊推理、BP神經網絡等。但是這些方法都需要大量樣本來構造識別系統或者對識別系統進行訓練。
由于根據目標的多種特征來識別,所以各獨立子系統的識別結果不是一個確定的識別結果,而是目標識別框上的模糊集,而目標識別框是根據各子系統輸入特征所形成的子目標。如艦載雷達子系統提取目標的速度為20節、雷達反射截面積為2000m2,目標識別框為(1航母,2驅逐艦,3護衛艦,4水面快艇,5商船),則經過獨立識別中的算法對速度和雷達反射截面積目標特征處理后,識別結果可能是(0.05,0.15,0.3,0.3,0.2)。
5.4決策融合
各獨立識別子系統的結果送往融合中心后,融合中心依據決策級融合算法對識別結果進行融合,利用最大隸屬度原則確定最終的識別結果。
6 結語
本文在研究水面艦艇多傳感器和水面艦艇目標分類的基礎上,提出了一種水面艦艇目標識別模型,并對模型中的預處理、特征提取、獨立識別和決策融合四個組成部分的功能進行了分析研究,對完善水面艦艇目標識別系統具有一定的參考價值。
[1]劉高峰,李敏勇.艦載多傳感器數據融合系統的層次設計[J].海軍工程學院學報,1999,89(4):43-47.
[2]陳科文,張祖平,龍軍.多源信息融合關鍵問題、研究進展與新動向[J].計算機科學,2013,40(8):6-11.
[3]黃漫國,樊尚春,鄭德智,等.多傳感器數據融合技術研究進展[J].傳感器與微系統,2010,29(3):5-8.
[4]曲曉慧,安鋼.數據融合方法綜述及展望[J].艦船電子工程,2003,134(2):2-4.
[5]李弼程,黃潔,高世海,等.信息融合技術及其應用[M].北京:國防工業出版社,2010.
[6]劉同明,夏祖勛,解洪成.數據融合技術及其應用[M].北京:國防工業出版社,1998.
[7]陸振波,章新華,胡洪波.水下目標輻射噪聲的聽覺特征提取[J].系統工程與電子技術,2004,26(12):1081-1083.
[8]曹立華,李寧,楊詞銀,等.3~5um紅外探測器的輻射定標[J].紅外與激光工程,2012,41(4):858-864.
[9]黃濤,夏佩倫.潛艇多信息源目標融合識別模型[J].武器裝備自動化,2004,23(3):648-651.
[10]何友,王國宏,彭應寧,等.多傳感器信息融合及應用[M].北京:電子工業出版社,2007.
Procedural Model Analysis of Warship Target Fusion Recognition
LI JunHUANG Liwei
(Dalian Naval Academy,Dalian116018)
How to use sensors equipped on surface ships accurately and timely to identify the targets is the key to victory in naval battle.Based on the study about data fusion,the paper analyzes divisions of sensors on surface ship and target classifications of surface ships,which presents a model of warship target fusion recognition.The sensor subsystems in the model use sensors to obtain information and extract the target character information,and independently identify the target types based on input character information.Finally in the fusion recognition center of model the results from various subsystems are fused to determine the identity of the ultimate goal.
data fusion,target recognition,character information
2016年3月10日,
2016年4月23日
李軍,男,碩士,研究方向:目標識別,數據融合。
TP391.41DOI:10.3969/j.issn.1672-9730.2016.09.008
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
