PCL庫點云統計去噪算法的應用研究
2016-10-22 02:22:42羅方燕
現代計算機 2016年26期
羅方燕
(廣東職業技術學院信息工程系,佛山 528041)
PCL庫點云統計去噪算法的應用研究
羅方燕
(廣東職業技術學院信息工程系,佛山528041)
去噪是點云數據處理中的重要過程,PCL中常用的點距離統計去噪算法涉及鄰域規模K和方差倍數m兩個參數,不同的取值對去噪結果的影響比較大。在統計去噪原理的基礎上,根據正態分布的概率密度函數和3σ準則,對m進行理論分析。其中K值的大小主要影響去噪細節。實驗中采用遙感數據進行驗證,并通過不同參數組合進行比較。實驗結果顯示,如果當m大于2時,概率密度比較大,去噪作用比較小;K值對去噪結果的影響不明顯。該統計去噪算法可以根據不同的參數值進行不同程度的去噪。
點云去噪;距離統計;3σ準則;PCL
0 引言
隨著三維掃描技術的發展和廣泛應用,特別是微軟的低價Kinect體感器的發行,使普通的民眾可以方便地獲取三維點云數據。在拍攝過程中,由于工作環境、光線等因素,在點云數據中附帶有一定量的噪聲和外點。在點云數據處理過程中,將這部分非真實的數據,特別是外點需要進行預先處理。目前點云去噪算法主要分成四類[1-2]:一是數學形態學濾波算法;二是逐漸加密的濾波算法;三是基于表面的方法;四是基于分割的方法。
Nurunnabi[2]提出采用穩健局部加權回歸算法,將三維數據轉換為二維的x-z和y-z關系數據,分別在這兩個二維數據上進行回歸運算,直至誤差達到閾值。如果兩次運算實際點都比求取值還小,則認為該點為地面點云。Zeng使用深度數據差的熵信息對點云進行分類,根據閾值,將點云分為地面點云的物體點云[3]。Rodriguez-Caballero[4]使用形態過濾算法和光譜信息相關結合,在過濾過程中將點云的細節進行保存。Hu[5]提出可適應表面過濾器,對點云數據進行分類。Rusu于2008年提出K鄰近點距離統計[6]算法,首先計算出該點到周邊最近K點集的距離,然后計算出距離均值和標準方差,根據均值和方差設定閾值,用于判斷點是否為外點。
1 PCL庫簡介
PCL(Point Cloud Library)[7]是最近幾年創建的主要用于處理三維處理的開源庫,庫中包含了最新有關點云的濾波、特征估計、表面重建、配準、模型匹配和表面分割等算法。該庫大部分有關數學算法實現是基于OpenMP、TBB、FLANN等進行實現的,PCL庫可以被編譯運行在不同的平臺,包括:Windows、MacOS、Linux和Android。該庫遵循BSD開源協議,使用者可以任意對源代碼進行修改和二次開,并可以無償用于商業,例如目前PCL已完全集成在Robot Operation System(ROS)機器人操作系統中,根據體感器獲取的點云數據對機器人周邊的環境進行識別。目前PCL庫在官方網可以下載已經編譯好的安裝文件,亦可從github中下載源代碼進行編譯安裝。如果自行編譯安裝,可以選擇需要的模塊進行安裝。采用PCL可以進行點云數據的近似實時的處理[8]。
2 K鄰近點距離統計
在該算法中,主要有兩個參數需要使用者進行設置,一是K鄰近點集的規模值K,如果K值越大,去噪之后邊緣缺失將比較嚴重,但可以有效去除背景等噪點。另外一個是標準方差的倍數。
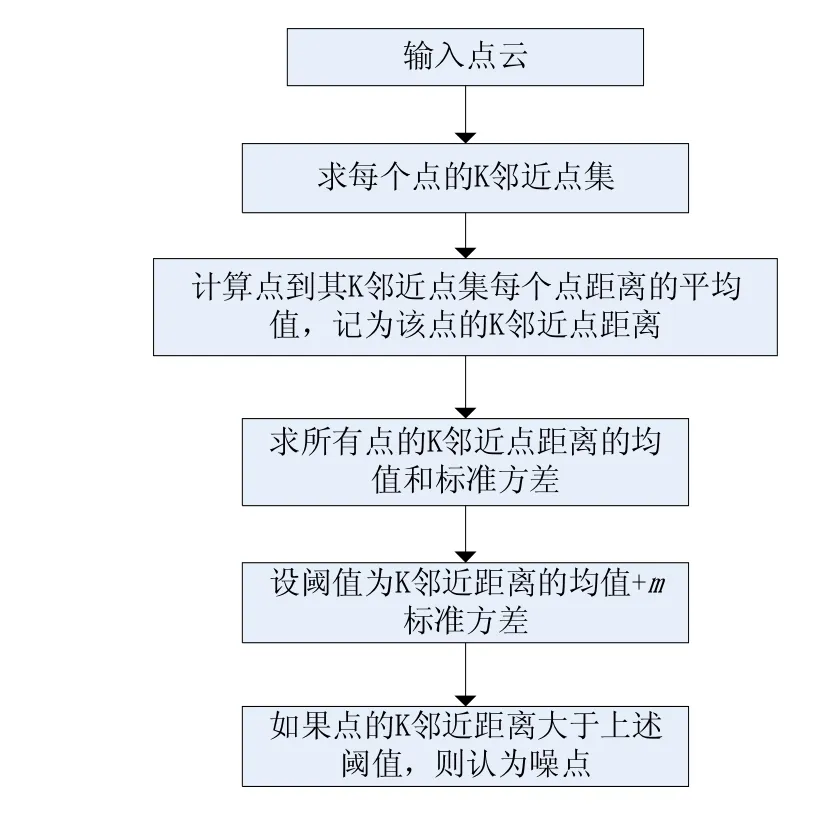
圖1 K鄰近點距離統計算法流程圖

根據3σ準則,當D~N((μ,σ2)時,


根據該原則,如果變量在(μ-3σ,μ+3σ)范圍之外,已經不再認為是隨機噪聲,而是粗大噪聲。

表1 正態分布對于不同m的密度理論值
3 實驗及結果分析
本文中的實驗采用PCL中的K鄰近點距離算法,對一組來自國際攝影測量與遙感學會(ISPRS)的遙感數據進行去噪和分析,主要檢測在不同K值的情況下,標準方差倍數對結果的影響。如圖2為一城市的遙感數據,點云數量為243400,主要包括有建筑物、道路和樹木的物體。為了進一步對數據進行處理,需要對其進行去噪。
在實驗中,當K為30、40和50時,分別取m值為0.5、1、1.5、2、2.5和3,去噪后的分布密度如表2所示。從該表中可發現不同規模的鄰近域中,方差倍數的影響的相似的,如圖3所示。
在圖3中,實踐的測量值,當方差倍數值小于2時,其概率密度比理論值偏大,即在計算時,將理論上屬于正常值的點被認為是噪聲。當方差倍數值大于等于2是,與理論值想接近,但因其概率密度為97%,在應用中實際的影響作用不大。如圖4所示,當K值相同是,圖4(a)和(c)m=0.5時的過濾結果,與原始遙感數據相比,過濾的范圍比較大,而圖4(b)和(d)m=3,與原始遙感數據相差不大,沒有達到過濾作用。當m值相同時,不同K值的結果大體相同,但也存在差別。
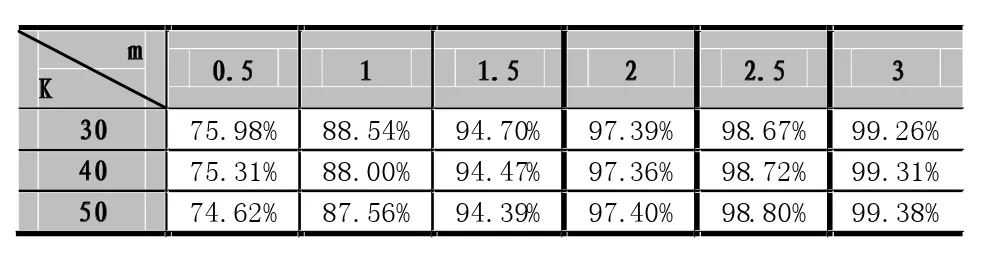
表2 真實概率密度值
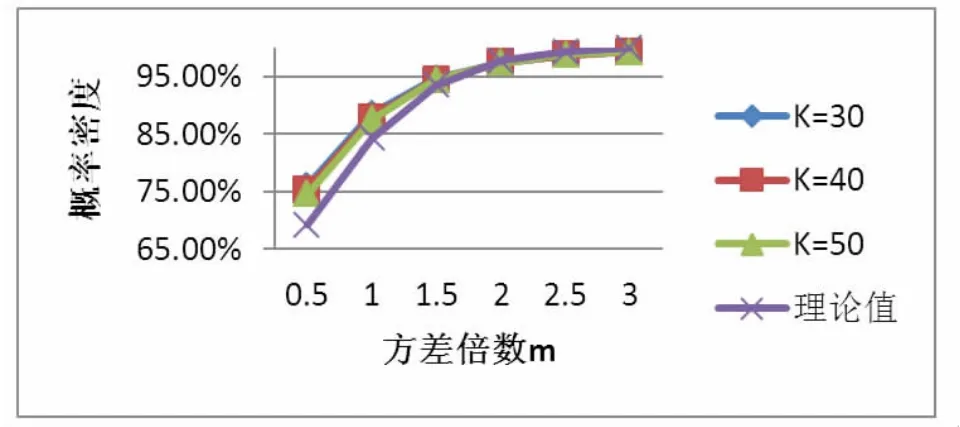
圖3 曲線圖
通過上述的實驗,K鄰近點距離統計去噪方法對點云數據進行處理時,K值雖影響不大,但缺影響運行速度和去噪程度。K值的大小表示距離的參考范圍,點的距離會隨著K值的增大而增加,特別當該點是離群點時,其距離增加更加明顯,可以更好地去噪。例如當m值小于2時,由表2和圖3實驗結果顯示,概率密度值隨K值的增加而減小。方差倍數值m是主要影響去噪程度的參數,更加正態分布的3σ準則,如果當m值大于2時,概率密度大于97%,可以將比較明顯的噪聲基本去除,但對于其他噪聲比較隱蔽的噪聲無法去除,如圖4中,圖(b)和(d)中與圖(a)和(b)相比較,明顯存在有邊緣的離群點團。
4 結語
本文就PCL庫中的K鄰近點距離統計點云去噪算法,鄰域規模大小K和方差倍數m對去噪的影響進行應用研究。K值對去噪的效果影響比m值小。由正態分布的3σ準則可知m值大于2時,去噪效果不明顯,但如果m值比較小,則會將數據的細節點被當作噪聲被去除。在應用中可以根據點云數據受干擾的情況,合理選擇m值。在此僅采用PCL的點云統計去噪進行初步的應用研究,在后續工作過程中,將繼續進行該項工作。

圖4 去噪結果
[1]Li,Z.,J.Chen,E.Baltsavias.Advances in Photogrammetry,Remote Sensing and Spatial Information Sciences:2008 ISPRS Congress Book[M].Vol.7.2008:CRC Press.
[2]Nurunnabi,A.,G.West,D.Belton.Robust Locally Weighted Regression Techniques for Ground Surface Points Filtering in Mobile Laser Scanning Three Dimensional Point Cloud Data[J].IEEE Transactions on Geoscience and Remote Sensing,2016,54(4):2181-2193.
[3]Zeng,Z.,J.Wan,H.Liu.An Entropy-Based Filtering Approach for Airborne Laser Scanning Data[J].Infrared Physics&Technology,2016,117(2016):141-146.
[4]Rodríguez-Caballero,E.,A.Afana,S.Chamizo,et al.A New Adaptive Method to Filter Terrestrial Laser Scanner Point Clouds Using Morphological Filters and Spectral Information to Conserve Surface Micro-topography[J].ISPRS Journal of Photogrammetry and Remote Sensing,2016,117:141-148.
[5]Hu,H.,Y.Ding,Q.Zhu,et al.An Adaptive Surface Filter for Airborne Laser Scanning Point Clouds by Means of Regularization and Bending Energy[J].Isprs Journal of Photogrammetry and Remote Sensing,2014,92:98-111.
[6]Rusu,R.B.,Z.C.Marton,N.Blodow,et al.Towards 3D Point Cloud Based Object Maps for Household Environments[J].Robotics and Autonomous Systems,2008,56(11):927-941.
[7]Rusu,R.B.,S.Cousins.3d is here:Point Cloud Library(PCL)[C].in Robotics and Automation(ICRA),2011 IEEE International Conference on.Shanghai,China:IEEE.2011:1-4.
[8]Miknis,M.,R.Davies,P.Plassmann,et al.Near Real-Time Point Cloud Processing Using the PCL[C].in Systems,Signals and Image Processing(IWSSIP),2015 International Conference on.IEEE.2015:153-156.
Research on the Application of Point Cloud Statistical Removal of PCL
LUO Fang-yan
(Department of Information Engineering,Guangdong Polytechnic,Foshan 528041)
Denoising is an important part in point cloud data processing.The point neighborhood statistics filter in Point Cloud Library is a common algorithm,which involves two parameters the neighborhood size K and the variance multiplier m.Both of the values influence the denoising results.Based on statistical denoising principle,carries out an analysis on the m,according to the probability density function of normal distribution and 3σ criterion.Uses the K value decide the details.Remote sensing data in experiments,and makes the comparison under different parameters.The results show that if when m is greater than 2,the probability density is larger,the denoising effect will be small,but K's effect is not obvious.The point neighborhood statistics filter can be used for different levels of denoising under different parameter values.
Point Cloud Denoising;Statistical Distance;3σ Criterion;Point Cloud Library
1007-1423(2016)26-0063-04DOI:10.3969/j.issn.1007-1423.2016.26.015
羅方燕(1981-),女,廣東梅州人,碩士,研究方向為三維數據處理
2016-06-14
2016-09-05
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
當代陜西(2021年2期)2021-03-29 07:41:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
媽媽寶寶(2017年3期)2017-02-21 01:22:28
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38