獨輪電動車非載人條件下的平衡加速運行可行性研究
2016-10-21 17:00:17孫寬慰潘翔阮翠霞劉妮
科技創新與應用 2016年7期
孫寬慰 潘翔 阮翠霞 劉妮

摘 要:獨輪自平衡電動車是一種新型、環保、便捷的代步工具。為探討非載人條件下小車加速減速自平衡運動規律,搭建承載重物而非載人的實驗系統,并針對系統結構建立了物體—車一體化系統的動力學模型,通過系統實際運行過程中的加速運動實驗獲取了相關數據,并結合動力學模型的計算分析了獨輪車載物運行中可實現平衡的特點,為實現獨輪車無人駕駛提供依據。
關鍵詞:獨輪電動車;自平衡;動力學建模;加速運動
引言
自平衡獨輪電動車為一種新型、環保、便捷的代步工具,它在運行過程中的縱向平衡問題與兩輪自平衡機器人原理相同,通常在載人條件下人—車恰好組成的是一個可以移動的一級倒立擺系統,該系統為高階次、不穩定、多變量、非線性、強耦合系統,其動力學系統非常復雜,屬于欠驅動系統。在車輪轉動的方向在靜止狀態下不能維持平衡,必須通過車輪的運動調節才能實現平衡,這種電動車系統為動態平衡系統。
獨輪車系統在俯仰方向上,通過電機驅動力和人的自身平衡調節作用使車體補償角度,以實現車體的平衡和行進。獨輪車前后運動是靠人體重心的前后偏移來控制的。在文獻[1]、[2]、[3] 中都有敘述到輪式自平衡技術的控制方法,這些方法都是從系統電路設計,電機驅動控制模式加以分析與論述的。然而,就無人條件下單純載物來實現自平衡獨輪電動車的運行尚無文獻報道,當然,僅就技術實現來看可采用遙控方式加以解決,其中的問題是控制對象的選擇,若單純從電路控制實現電機的加、減速驅動僅僅是拒絕了單純的運動問題,而整個系統的平衡問題無法解決;因此,針對這類問題只能通過對車體載物的物件重心的移動實現加、減速的方法才能保證小車系統的自平衡。
本研究利用獨輪電動車固有的系統,設計并搭建無人條件下單純載物的實驗系統,結合實際運行試驗研究獨輪電動車的運動規律,探索該類小車無人條件下可實現自平衡運動的可行性。
1 實驗系統設計
獨輪電動車的運動平衡控制是系統的核心問題。在實際使用中,當載人運行時,是由人雙腳站立在獨輪車兩側踏板上,通過人體的前后俯仰保持獨輪車的平衡與前行運動。若建立一個坐標系,小車前行方向為X方向,小車輪軸的左右翼方向為Y方向,小車垂直的俯仰方向則為Z方向;一旦將小車左右搖擺加以約束,使得小車僅能相對進行前后搖擺,這樣,當在非載人條件下,從原理上講,將小車上的重物實施中心的前后移動,便依舊可讓載著物體小車實現加速或減速移動。在此指導思想下,設計搭建一套可實現載物獨輪小車加減速的實驗系統,其實驗系統構架如圖1所示。
本框架總體尺寸為:長500mm ,寬300mm,高1000mm;載物部位高度:1000mm;載物重量:20kg。
1.1 重心前后移動調節系統
以獨輪車踏板為加載支撐點,在其上安裝框架式結構,在整體結構的上半部位安裝一個平衡桿,其上安裝有一個可移動的滑塊,滑塊上有一載物臺,實驗用重物安放在在舞臺上,通過滑塊前后的位置調整,來獲得車載重物重心的前后偏移,以此改變獨輪車行進時整體的前后傾角,實現模擬人體加速時的不同姿態,從而在保證小車平衡的狀態下獲取運行小車的加速與減速。
一般情況下,人體的前后俯仰會決定加、速與減速的快慢,也就是加速度的大小,同樣道理,將車載重物的重心相對車體垂直位置偏移多少也會獲取大小不等的加速度,初步判斷載物的偏移量與加速度大小成正比。
本系統僅僅考慮載物小車在直線行進時,即X-Z平面上的加速減速的平衡問題,因此針對由于小車左右搖擺,即Y-Z平面上的不穩定性采用輔助支撐輪實施了約束,使得問題討論的條件簡化。
1.2 姿態檢測系統關鍵元器件選擇
就研究目的而言,是為了探索在無人操作的情況下,如何實現載物小車的加、減速的平衡運行,另外在針對現有的整車控制系統不實施改造與開發的情況下,如何使系統滿足要求從而獲取相關數據,則是該實驗系統索要解決的首要問題。據此,從衡量載物小車實現平衡運行時的速度、加速度及時間等幾方面加以考量。其中,主要實施的是姿態檢測,加速時段檢測以及靜止到加速完成的時間長短檢測。
姿態檢測系統選用加速度計MPU6050芯片。芯片內部集成了姿態解算器, 配合動態卡爾曼濾波算法,能夠在動態環境下準確輸出模塊的當前姿態,姿態測量精度 0.01 度,穩定性很高。
量程:加速度:±16g,角速度:±2000°/s。
分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
2 驅動原理與力學模型
2.1 一般假設條件
由于獨輪車自身系統的復雜和人參與駕駛過程比較復雜, 很難建立準確的模型, 需要在允許的范圍內忽略摩擦、彈性等因素,進行合理化的假設,以建立滿足要求的近似模型。假設條件如下:(1)僅考慮X-Z平面內的平衡,將Y-Z平面的擺動實施了約束,系統為直線運動;(2)駕駛過程中車架與人始終運動一致,將車架與負載(人)視為一體,且與車輪均視為剛體;(3)獨輪車車輪與地面始終保持接觸,且運行時車輪與地面間無滑動;(4)忽略摩擦阻力偶矩,只考慮摩擦力與摩擦力矩;(5)忽略運行過程中空氣阻力的影響。
2.2 驅動原理與力學模型
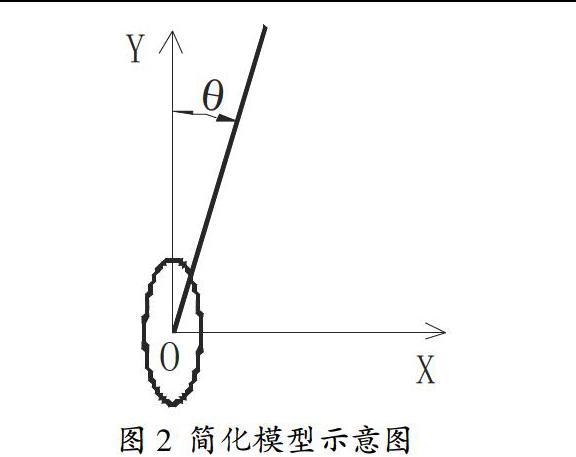
當采用人來駕駛獨輪電動車時,系統可分為三個部分:車輪、車身(車架和車座)和人體軀干。如假設中所述,人在駕駛過程中與車身始終運動一致,故可簡化為一體,其質量和用m表示。此時系統可視為一個以駕駛者身高l為桿長、以輪轂電機為底輪的倒立擺系統,圖2為簡化后的模型示意圖。
我們定義以車輪軸心O為坐標系原點,在平行于獨輪車側面建立二維平面坐標系,獨輪車前后俯仰方向為X軸,重力反方向為Z軸。圖2中加黑部分為簡化后的倒立擺系統。角度θ 為倒立擺系統偏移角。
在駕駛過程中,人體在前后方向偏移一定角度后,向下產生一個有重力作用與重心的扭矩M0。獨輪車姿態測量模塊測得傾角θ,反饋給控制單元,控制單元分析后控制電機產生同方向的驅動力F,使獨輪車產生向前加速度a,同時驅動力作用于獨輪車重心產生力矩M1,與力矩M0平衡。即
M1=-M0 (1)
力矩平衡,即可保持獨輪車的整體平衡,并向前產生加速度,驅動獨輪車前進。
獨輪車與人體系統簡化后的力學模型,如圖3所示。
由圖3分析,系統受到重力G作用于系統重心B,地面支持力F作用于車輪中心。
由系統平衡分析
|F|=|G|(2)
二力作用點不在同一點,產生一對力偶M0,方向為順時針。
根據2.2分析
|M0|=|M1| (3)
重力mg|M0|=mg×|AB| (4)
驅動力Ff作用于點O,產生對系統重心B的力矩M1,方向為逆時針。
|M1|=|Ff|×|OA| (5)
由(3)(4)(5)可得
mg×|AB|=|Ff|×|OA| (6)
tan(?茲) (7)
驅動力產生加速度a
a= (8)
由(6)(7)(8)化簡得
a=gtan(?茲) (9)
式(9)即為加速度與傾斜角的關系式。
由此可見,獨輪車的加速度大小是由傾斜角決定的,故人體可以控制車身的傾斜角度控制獨輪車的加速度。
3 實驗與分析
通過建立力學模型和驅動原理分析,得到了加速度與傾斜角的定量關系。在實驗過程中,將采用搭建的實驗系統對獨輪車的運動規律進行實驗,驗證上述關系。
通過調節實驗系統上的滑塊的位置,來改變獨輪車的傾斜角度。在實驗過程中,按傾斜角的不同,分為三組實驗。
3.1 實驗過程
姿態檢測系統所測物理量有ax、ay、az 、wx、wy、wz、AngleX、AngleY、AngleZ。其中,本實驗需要的數據列為紅色的ay列和AngleX列。
加速度a對應表中ay列,傾斜角θ對應表中AngleX列。
第一組,如表1所示。
第二組,如表2所示。
第三組,如表3所示。
3.2 實驗數據處理與分析
假設關系式
a=gtan(?茲)
等價于 (10)
將a=ay,θ=AngleX代入式(10)得
1= (11)
將實驗測得的每組數據代入k=(其中k為比例系數),得到三組比例系數k1,k2,k3。通過比較比例系數k值是否接近為“1”,可以驗證假設關系式的正確性。
第一組,如圖4所示。
第二組,如圖5所示。
第三組,如圖6所示。
三組各自平均值如下:
K1=0.996,K2=1.033,K3=1.069。
有三組k值的曲線與平均值可得
k≈1
即關系式k=■=1成立,所以1=■成立。
3.3 結論
從以上三組實驗可知由此可知,獨輪自平衡電動車前后加速度與傾斜角關系為a=gtan(?茲),故獨輪自平衡電動車前后運動加速度隨獨輪車傾斜角變化而變化。
4 結束語
文章設計并搭建了獨輪自平衡電動車實驗系統,根據人駕駛獨輪自平衡電動車的際情況,建立了人與獨輪車一體的系統物理模型。分析探討了獨輪車運動的加速規律,得到結論。然后通過物理實驗,用數據證明的結論的正確性。但文章分析的獨輪車系統與實驗系統比較簡單,在更加復雜的獨輪車自平衡控制方面有待進一步研究。
參考文獻
[1]李欣源,阮曉鋼,任紅格.柔性雙輪平衡機器人的動力學建模與分析[J].機器人,2010,32(1):138-144.
[2]屠運武,徐俊艷,等.自平衡控制系統的建模與仿真[J].系統仿真學報,2004,16(4):839-841.
[3]蒙祖祈,劉海剛,項華珍,等.小型兩輪自平衡電動車系統的設計與研究[J].工業控制計算機,2015(3).
指導老師:王曉林。