徒步導(dǎo)航系統(tǒng)中的自適應(yīng)步態(tài)優(yōu)化檢測方法研究*
2016-10-21 11:32:02孫偉丁偉李瑞豹
傳感技術(shù)學報 2016年9期
關(guān)鍵詞:檢測
孫偉,丁偉,李瑞豹
(遼寧工程技術(shù)大學測繪與地理科學學院,遼寧阜新123000)
徒步導(dǎo)航系統(tǒng)中的自適應(yīng)步態(tài)優(yōu)化檢測方法研究*
孫偉*,丁偉,李瑞豹
(遼寧工程技術(shù)大學測繪與地理科學學院,遼寧阜新123000)
針對步態(tài)檢測的可靠性和準確性成為制約個人徒步導(dǎo)航定位系統(tǒng)高精度定位的主要因素,提出一種基于K均值聚類參數(shù)調(diào)整的自適應(yīng)步態(tài)檢測算法。首先研究行走過程的足部運動規(guī)律,并分析慣性測量單元輸出加速度和角速率的數(shù)據(jù)特征,提出采用比力幅值滑動方差作為檢測依據(jù)的步伐檢測方案;分析滑動方差窗口參數(shù)、初始檢測閾值參數(shù)和誤檢修正時間參數(shù)對于檢測結(jié)果的影響并指出三者的關(guān)系,確定窗口參數(shù)、初始閾值選擇的一般準則以及利用K均值聚類自適應(yīng)確定時間參數(shù)以糾正初始檢測結(jié)果中誤檢步態(tài)的可行性。利用實驗室現(xiàn)有MEMS傳感器開展了5組不同狀態(tài)下的徒步實驗,實驗結(jié)果驗證了步態(tài)檢測算法的可行性和有效性。
人員定位系統(tǒng);步態(tài)檢測;滑動方差;K均值聚類;自適應(yīng)
EEACC:7120;7230M;7320Edoi:10.3969/j.issn.1004-1699.2016.09.016
徒步導(dǎo)航系統(tǒng)是一種典型的個人連續(xù)定位系統(tǒng),根據(jù)加速度計、陀螺儀輸出信息研究行走過程的運動規(guī)律進而推算行人的實時位置[1-3]。MEMS慣性技術(shù)的發(fā)展推動了徒步導(dǎo)航技術(shù)的發(fā)展并為其實現(xiàn)工程化提供保障。人員定位系統(tǒng)可根據(jù)其特有步態(tài)規(guī)律實施步態(tài)檢測算法區(qū)分步態(tài)靜止階段和擺動階段,對靜止步態(tài)階段應(yīng)用零速修正算法及時修正器件漂移引起的位置誤差[4-5]。因此步態(tài)檢測結(jié)果的有效性和準確度將直接影響定位結(jié)果的可靠性和精度,國內(nèi)外學者以提高檢測結(jié)果的準確度為目的開展了大量的研究工作并提出了多種檢測方法。利用的檢測量包括比力模值、比力滑動均值、比力滑動方差、角速度模值、角速度滑動均值、角速度能量等一種或多種相結(jié)合,檢測涉及的參數(shù)包括滑動方差窗口大小、檢測閾值以及同一步態(tài)持續(xù)時間長短[6-9]。已有檢測算法大都基于特定的步態(tài)環(huán)境,檢測參數(shù)大小固定,對不同個體、不同運動環(huán)境適應(yīng)性較差。本文提出一種以比力滑動方差為檢測量,結(jié)合MEMS器件數(shù)據(jù)特點確定窗口參數(shù)和閾值參數(shù),利用聚類方法自適應(yīng)的確定時間參數(shù)并糾正初始分類結(jié)果,取得較為理想的測試結(jié)果。
1 步態(tài)規(guī)律分析
1.1傳感器安裝位置的確定
一個完整的步態(tài)周期包括腳跟離地HO(Heel Off)、腳尖離地TO(Toe Off)、腳跟著地HS(Heel Strike)、腳尖著地TS(Toe Strike)4個過程(圖1)[10]。其中TS至HO為靜止階段,其余各狀態(tài)構(gòu)成擺動階段。靜止階段腳的速度理論上應(yīng)當為零,對應(yīng)于IMU輸出比力應(yīng)等于當?shù)刂亓铀俣龋撬俣葹榱恪5珜嶋H情況由于器件偏差及測量誤差的存在,IMU輸出與理想值存在偏差,進而導(dǎo)致慣性解算腳的實際速度不為零。步態(tài)檢測的目的就是辨識人行走周期中的靜止階段,是零速修正得以實施的前提。
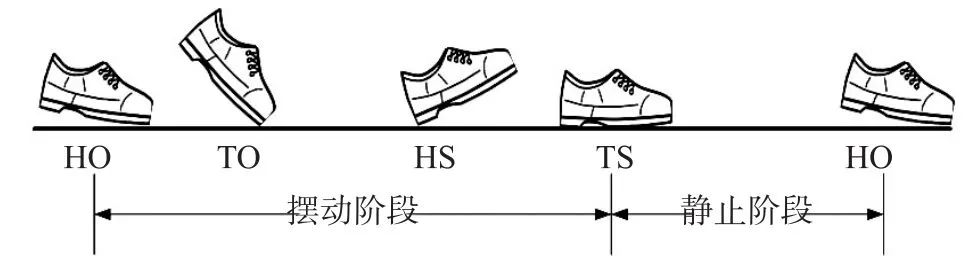
圖1 步態(tài)示意圖
徒步導(dǎo)航系統(tǒng)中的慣性測量單元IMU(Inertial Measurement Unit)安裝位置各有不同,如安裝在鞋跟側(cè)面、鞋底中央、鞋面[8-9,11]。依據(jù)如上分析,將傳感器安裝于鞋面時可以獲得最長的靜止時間,可為零速修正提供充足的執(zhí)行時間,因此,本文將MEMS安裝于鞋面(圖2),并定義載體坐標系(b系)的xb沿傳感器縱軸指前,yb沿傳感器橫軸指左,zb與xb、yb構(gòu)成右手空間直角坐標系指天。

圖2 系統(tǒng)結(jié)構(gòu)圖
1.2步態(tài)特征提取
為尋求最優(yōu)判別依據(jù),進一步確定步態(tài)變化對于慣性器件輸出數(shù)據(jù)的影響,截取某次測試后的慣性器件輸出進行比對分析(如圖3)。
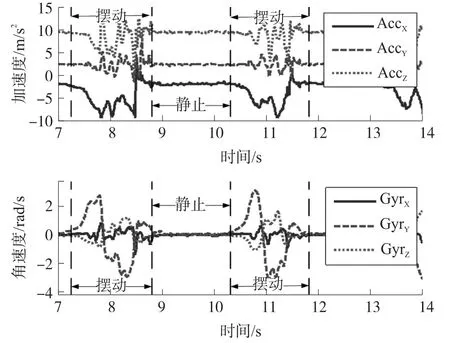
圖3 行走過程IMU輸出
可以看出,足部靜止階段三軸加速度計輸出及三軸陀螺儀輸出都保持較長時間的穩(wěn)定狀態(tài),但是3個正交方向的角速度近似為零,由于IMU安裝角的存在導(dǎo)致重力分量作用于xb軸、yb軸加速度計導(dǎo)致加速度分別穩(wěn)定于3個固定值;足部擺動階段的數(shù)據(jù)波動變化較為劇烈,三方向加速度變化規(guī)律類似,而三方向角速度中y軸變化幅度顯著大于其余兩軸,這與人行走過程中足部運動規(guī)律及IMU傳感器坐標軸指向?qū)?yīng)。
步態(tài)檢測用于判別行走過程中足部是否完全處于靜止狀態(tài)。因此步態(tài)檢測算法可轉(zhuǎn)化為模式識別問題,且檢測結(jié)果僅有0、1兩種狀態(tài)(0表示靜止,1表示運動)[12-13]。檢測量的選擇是步態(tài)檢測的前提,不同檢測量具有不同的數(shù)據(jù)特征,檢測結(jié)果的有效性和準確率也有所區(qū)別。考慮MEMS加速度計性能比MEMS陀螺性能穩(wěn)定、精度高[14-15],且由圖3可知行走過程僅一個方向陀螺數(shù)據(jù)變化明顯,因而選取加速度計輸出構(gòu)造檢測量。
采用加速度幅值|fb|作為檢測量,通過選擇適當檢測閾值可實現(xiàn)步態(tài)的辨識,但是通過對圖4加速度幅值數(shù)據(jù)分析可發(fā)現(xiàn),足部擺動階段加速度幅值波動大,這將導(dǎo)致檢測結(jié)果中擺動階段出現(xiàn)許多錯誤的短時靜止狀態(tài),易導(dǎo)致步態(tài)誤判現(xiàn)象的出現(xiàn)。
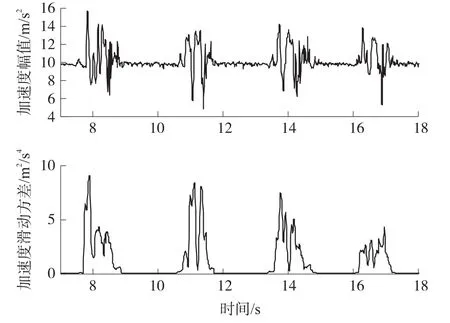
圖4 加速度幅值與滑動方差


則步態(tài)(Gait)檢測結(jié)果可表示為:

其中,σGate表示方差閾值。
2 自適應(yīng)步態(tài)優(yōu)化檢測
步態(tài)檢測涉及計算加速度滑動方差的窗口大小、判斷靜止狀態(tài)的加速度方差閾值、誤檢糾正的時間參數(shù)。根據(jù)圖5所示的檢測流程可以看出,初始步態(tài)檢測直接由加速度計數(shù)據(jù)通過選擇適當窗口參數(shù)和方差閾值得到初始靜態(tài)及動態(tài)。根據(jù)初始檢測結(jié)果對誤檢步態(tài)的進一步糾正以提高最終步態(tài)的準確性,時間參數(shù)的選取應(yīng)用了K均值聚類方法,具有自適應(yīng)性。
2.1窗口大小設(shè)定
窗口參數(shù)是計算加速度滑動方差的關(guān)鍵參數(shù),窗口大小決定參與計算滑動方差的數(shù)據(jù)量,不同窗口大小內(nèi)的滑動方差不同。為說明窗口參數(shù)的特征,分別取w=10、w=20、w=30、w=40計算加速度滑動方差(如圖6),對比發(fā)現(xiàn)w過小時導(dǎo)致閾值范圍小,容易出現(xiàn)擺動階段被誤檢為靜止,隨著w的取值增大,滑動方差越平滑,可供選擇的閾值范圍越大。但窗口參數(shù)并不是越大越好,因為計算時采用中心點前后各w/2的數(shù)據(jù),導(dǎo)航窗口長度產(chǎn)生一半的時間延遲,延遲時間取決于IMU采樣率。此外,當窗口參數(shù)過大時將導(dǎo)致部分擺動時刻滑動方差過于平滑,通過縮小閾值的可選擇范圍,避免出現(xiàn)擺動狀態(tài)漏檢。
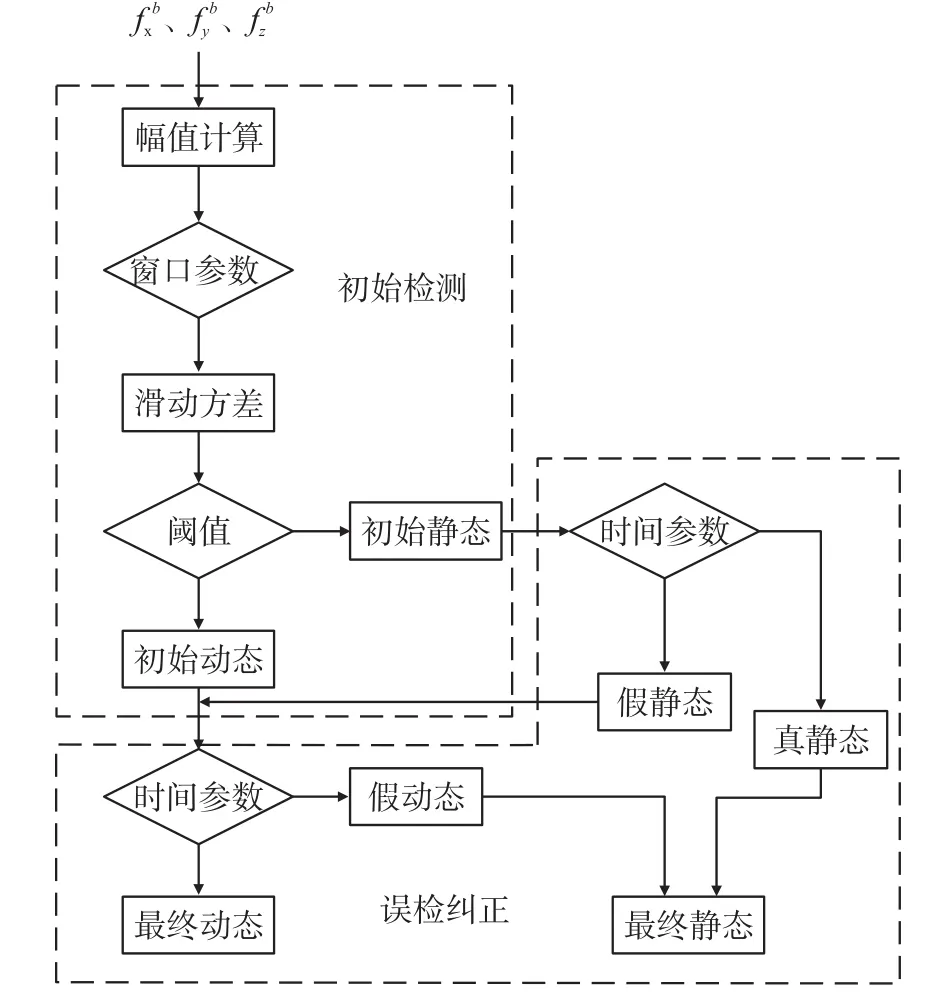
圖5 自適應(yīng)步態(tài)檢測流程圖
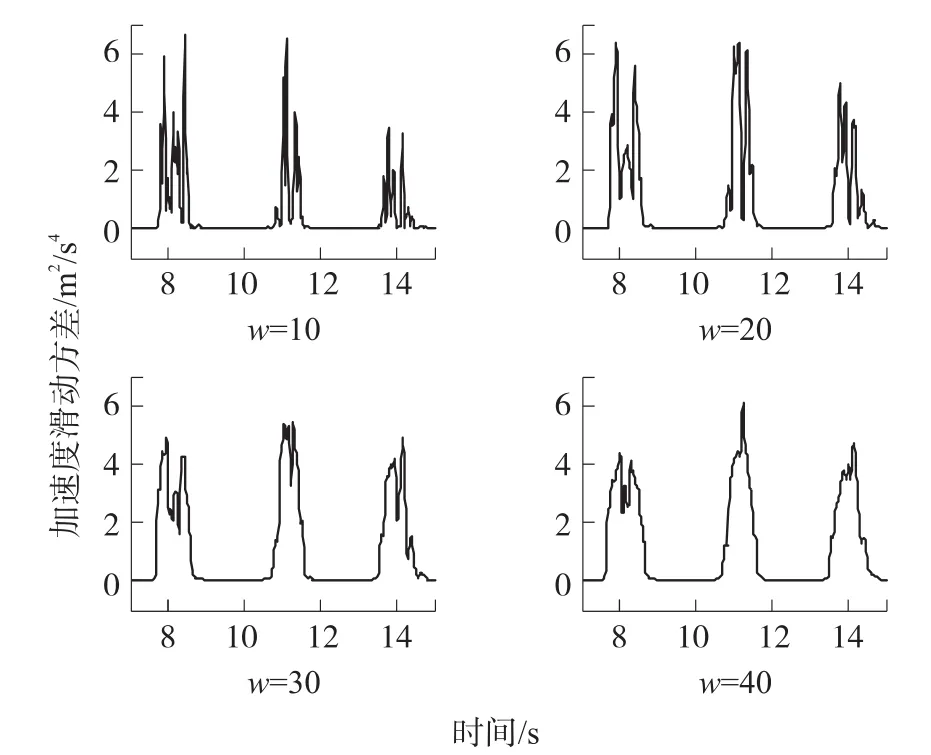
圖6 窗口大小對加速度滑動方差的影響
2.2閾值設(shè)定
閾值是直接區(qū)分行人足部狀態(tài)的核心參數(shù),不同個體、不同行走速度的行走數(shù)據(jù)多對應(yīng)的閾值參數(shù)各不相同,一般需要根據(jù)具體數(shù)據(jù)進行分析確定。通過對加速度滑動方差數(shù)據(jù)分析后發(fā)現(xiàn):測量誤差導(dǎo)致靜止階段滑動方差不為零,而是存在一些局部小幅度波動,同樣擺動階段也存在較大幅度波動。根據(jù)加速度滑動方差數(shù)據(jù)特點,閾值選擇及對應(yīng)的檢測結(jié)果存在以下幾種可能性:
③若取σ1<σGait<σ2,則不會漏檢所有靜態(tài),但將出現(xiàn)部分擺動階段被誤檢為短時靜態(tài)。
④若σGait大于擺動低谷最大值小于擺動尖峰最小值,則步態(tài)檢測退化為計步器,部分擺動階段被誤檢為靜態(tài)。
⑤若σGait大于所有擺動尖峰的最小值而小于擺動尖峰最大值,則將完全漏檢部分擺動階段,而相應(yīng)時段被認為處于靜態(tài)從而導(dǎo)致檢測步數(shù)少于實際行走步數(shù)。
⑥若σGait大于所有擺動尖峰的最大值,則將漏檢所有步態(tài),檢測步數(shù)為零,整個行走過程被視為靜態(tài)。
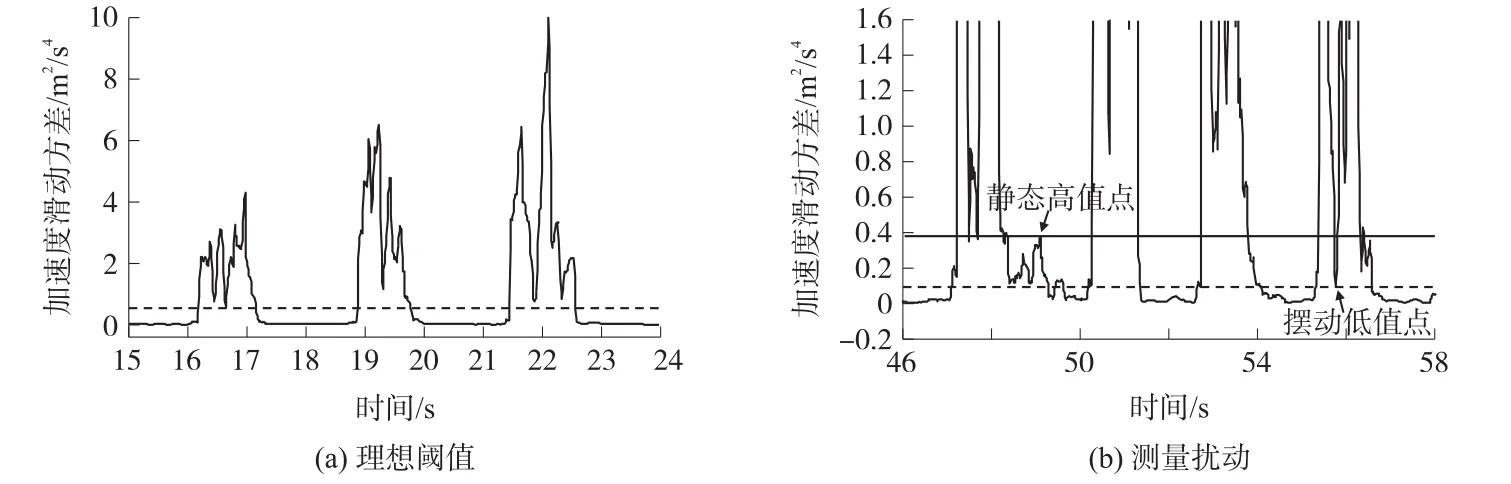
圖7 閾值參數(shù)選取
2.3時間參數(shù)選取
通過對閾值參數(shù)的分析可發(fā)現(xiàn)閾值的準確選取較為困難,當出現(xiàn)圖7(b)的情況時,無論怎樣選擇閾值都會產(chǎn)生誤檢并會出現(xiàn)與實際行走不符的短時靜態(tài)或短時動態(tài)。為進一步提高步態(tài)檢測方法的準確度,需對原始檢測結(jié)果進行糾正,剔除不正確的步態(tài)結(jié)果。其中一種有效的方法是比較所有初始檢測的靜態(tài)階段持續(xù)的時間,然后設(shè)置一時間閾值將所有小于閾值的短時靜態(tài)階段濾除。雖然該方法具有一定效果但可實現(xiàn)性差,原因在于時間參數(shù)選取存在困難,且不恰當?shù)倪x取可能導(dǎo)致糾正結(jié)果呈現(xiàn)更大的偏離誤差。
通過實現(xiàn)時間參數(shù)的自適應(yīng)選擇,可分別計算初始檢測靜態(tài)和動態(tài)的每一階段持續(xù)時間,然后利用K均值聚類方法根據(jù)靜態(tài)統(tǒng)計結(jié)果分為真、假靜態(tài)。那么任何界于假靜態(tài)持續(xù)最長時間和真靜態(tài)持續(xù)最短時間之間的時間參數(shù)都可被準確區(qū),并可實現(xiàn)對初始擺動的統(tǒng)計結(jié)果進行處理。具體實現(xiàn)過程如下:
①統(tǒng)計初始檢測步態(tài)各次靜態(tài)、擺動出現(xiàn)的時刻。對初始步態(tài)G作一次前向差分:

設(shè)定0表示靜態(tài),1表示擺動,因此式(5)中ΔG=-1即由擺動轉(zhuǎn)為靜態(tài),ΔG=1為由靜態(tài)轉(zhuǎn)為擺動,ΔG=0則表示狀態(tài)保持不變。記靜態(tài)開始時刻(也即動態(tài)結(jié)束時刻)為tstance,動態(tài)開始時刻(也即靜態(tài)結(jié)束時刻)為tswing,則有:
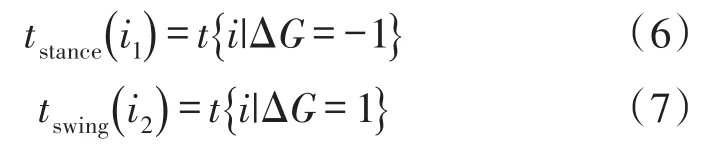
②分別根據(jù)tstance和tswing統(tǒng)計各次靜態(tài)和動態(tài)持續(xù)時間內(nèi)數(shù)據(jù)長度,記各次靜態(tài)持續(xù)長度為Lstance,各次擺動持續(xù)長度為Lswing,則有:
③K均值聚類,將Lstance聚類成真、假靜態(tài)兩類,Lswing聚類成真、假動態(tài)兩類。
④根據(jù)聚類結(jié)果選擇時間閾值,以靜態(tài)為例,記真靜態(tài)最小長度為Lmin,假靜態(tài)最大長度為lmax,則可按下式選擇時間參數(shù)(數(shù)據(jù)長度)閾值:

式中0<w<1為根據(jù)聚類效果選取的權(quán)重,若真靜(動)態(tài)聚類效果優(yōu)于假靜(動)態(tài),則取w>0.5的值,反之,w<0.5。
圖8分別給出基于本文設(shè)計方案得到的一組正常行走數(shù)據(jù)初始檢測結(jié)果靜態(tài)和動態(tài)的聚類效果。其中,每一數(shù)據(jù)點代表一次靜態(tài)或動態(tài)。
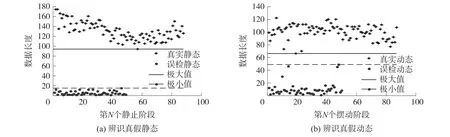
圖8 K均值聚類辨識初始檢測步態(tài)
3 實驗結(jié)果與分析
為驗證論文所提檢測算法的可行性,開展一組直線行走實驗。綜合考慮數(shù)據(jù)平滑程度并盡可能降低時間延遲對導(dǎo)航精度影響,設(shè)定采樣率fs=100 Hz,選擇窗口參數(shù)w=20并計算時間延遲δt=w/2/fs=0.1 s;初始檢測加速度滑動方差閾值設(shè)定為σGait=0.01m2/s4。通過對圖9描述的初始檢測步態(tài)曲線分析可以看出,由于選擇的方差閾值較小,因測量擾動的存在導(dǎo)致部分處于實際靜止階段的信息被誤檢為短時動態(tài),引起靜止階段呈現(xiàn)短時靜態(tài)與短時動態(tài)交替出現(xiàn)。依托本文設(shè)計方案,通過對初始檢測步態(tài)分別統(tǒng)計靜態(tài)與動態(tài)出現(xiàn)的時刻并對每次持續(xù)的時間進行聚類,然后根據(jù)自適應(yīng)時間參數(shù)對誤檢步態(tài)進行糾正,得到圖9所示的糾正后步態(tài)檢測結(jié)果。經(jīng)過修正后的結(jié)果具有明顯的步伐特征。
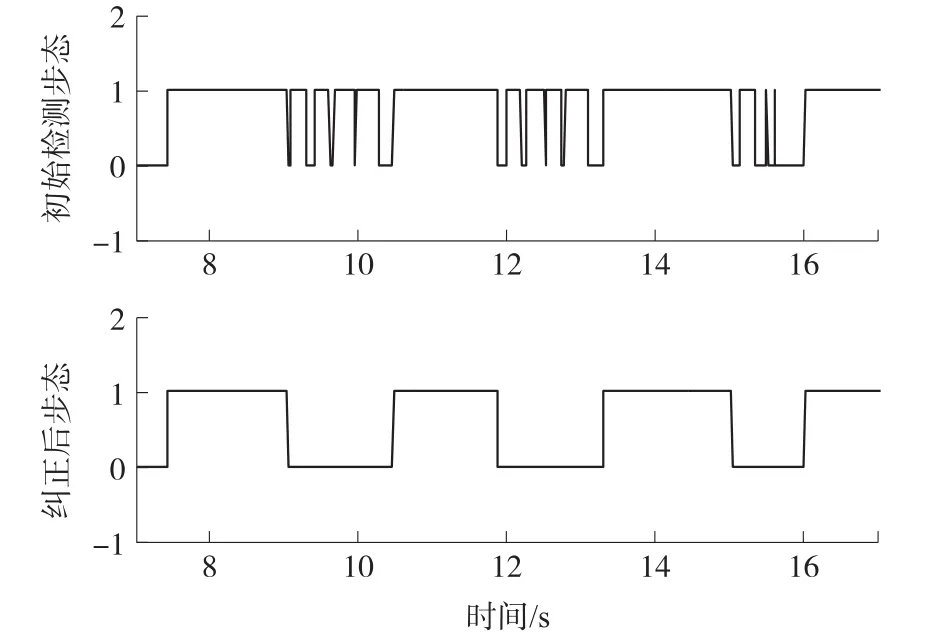
圖9 初始檢測步態(tài)與糾正后步態(tài)
將檢測步態(tài)加經(jīng)過重力值補償后與慣性器件輸出的加速度幅值進行比對(如圖10)。結(jié)果表明,盡管足部靜止階段時器件輸出存在小范圍測量擾動,但是自適應(yīng)時間參數(shù)檢測算法仍能準確有效地糾正由于閾值參數(shù)選擇不當引起的誤檢步態(tài)。
為驗證算法可靠性,利用MEMS慣性測量單元分別采集慢速、較慢、常速、較快和快速5種不同行走速度環(huán)境下的慣性數(shù)據(jù),同時記錄真實行走步數(shù)。實驗場地為測繪學院一樓直線走廊,行走距離70 m為定值,行走步數(shù)隨行走速度變化而不同。依次對5組數(shù)據(jù)按提出算法進行步態(tài)檢測,得到表1所描述的檢測結(jié)果與真實步數(shù)比對值。結(jié)果表明在不同行走速度下檢測準確率可達到99%以上。
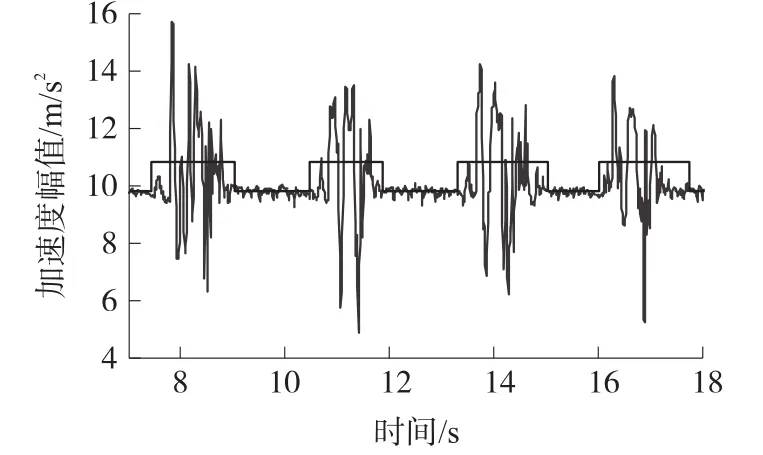
圖10 最終步態(tài)與加速度幅值
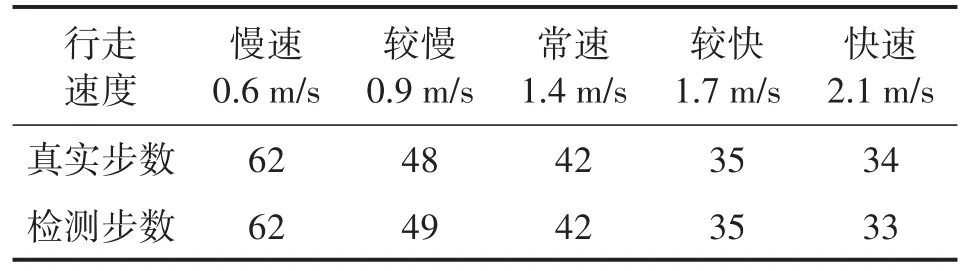
表1 不同行走速度檢測結(jié)果
4 結(jié)論
通過分析人員徒步行走規(guī)律,提出采用窗口參數(shù)、方差閾值和時間長度3個參數(shù)的步態(tài)檢測算法對行走過程的步態(tài)變化進行準確辨識。得出窗口參數(shù)和方差閾值用于初始檢測步態(tài),時間長度用于糾正初始檢測結(jié)果的誤檢步態(tài)的結(jié)論。其中,窗口大小可由IMU的數(shù)據(jù)采樣率確定,方差閾值仍需根據(jù)行走速度確定大致范圍,而時間參數(shù)通過引入K均值聚類法可自適應(yīng)確定。為驗證算法的可行性,開展多種運動狀態(tài)下的測試實驗,結(jié)果表明步伐檢測有效率可達到99%,該成果可為人員徒步導(dǎo)航系統(tǒng)的工程化提供技術(shù)參考。
[1]張金亮,秦永元,梅春波.基于MEMS慣性技術(shù)的鞋式個人導(dǎo)航系統(tǒng)[J].中國慣性技術(shù)學報,2011,19(3):253-256.Zhang J L,Qin Y Y,Mei C B.Shoe-Mounted Personal Navigation System Based on MEMS Inertial Technology[J].Journal of Chi?nese Inertial Technology,2011,19(03):253-256.
[2]孫偉,李婉秋,初婧,等.基于誤差修正技術(shù)的井下人員MEMS定位方法[J].傳感技術(shù)學報,2014,27(7):898-904.Sun W,Li W Q,Chu J,et al.MEMS Position Method for M Based on Error Correction[J].Chinese Journal of Sensors and Actuators,2014,27(7):898-904.
[3]崔瀟,秦永元,周琪,等.鞋式個人導(dǎo)航系統(tǒng)算法和試驗研究[J].測控技術(shù),2013,32(3):138-142.Cui X,Qin Y Y,Zhou Q,et al.Algorithm and Test Research on Shoe-Mounted Personal Navigation System[J].Measurement& Control Technology,2013,32(3):138-142.
[4]錢偉行,朱欣華,蘇巖.基于足部微慣性/地磁測量組件的個人導(dǎo)航方法[J].中國慣性技術(shù)學報,2012,20(5):567-572.Qian W X,Zhu X H,Su Y.Personal Navigation Method Based on Foot-Mounted MEMS Inertial/Magnetic Measurement Unit[J].Journal of Chinese Inertial Technology,2012,20(5):567-572.
[5]李超,蘇中,朱嘉林.可穿戴式自主定位技術(shù)的零速觸發(fā)算法研究[J].傳感技術(shù)學報,2014,27(5):627-632.Li C,Su Z,Zhu J L.A Research about Zero Velocity Trigger Algo?rithm Used in the Wearable Autonomous Positioning Technology[J].Chinese Journal of Sensors and Actuators,2014,27(5):627-632.
[6]王普,潘凱,任明榮,等.基于偽自適應(yīng)閾值零速檢測法的室內(nèi)個人導(dǎo)航系統(tǒng)[J].北京工業(yè)大學學報,2015,41(9):1308-1313.Wang P,Pan K,Ren M R,et al.Indoor Personal Navigation Sys?tem Based on Zero Velocity Detection of Pseudo Adaptive Thresh?old[J].Journal of Beijing University of Technology,2015,41(9):1308-1313.
[7]殷紅,郭杭,鄧曉華.基于Foot-Mounted的IMU室內(nèi)行人航位推算研究[J].測繪科學,2014,39(1):20-23.Yin H,Guo H,Deng X H.A Research on IMU Indoor Pedestrian Dead Reckoning Based on Foot-Mounted[J].Science of Survey?ing and Mapping,2014,39(1):20-23.
[8]Wang Z,Zhao H,Qiu S,et al.Stance Phase Detection for ZUPTAided Foot-Mounted Pedestrian Navigation System[J].Mecha?tronics,IEEE/ASME Transactions on,2015,20(6):3170-3181.
[9]Skog I,Nilsson J O,Handel P.Evaluation of Zero-Velocity Detec?tors for Foot-Mounted Inertial Navigation Systems[C]//2010 Inter?national Conference on Indoor Positioning and Indoor Navigation.Switzerland.2010.
[10]李辰祥.基于MEMS行人慣性導(dǎo)航的零速度修正技術(shù)研究[D].廈門:廈門大學,2014.Li C X.Research on Zeero-Velocity Update Technology of Pedes?trian Inertial Navigation Based on MEMS[D].Xiamen:Xiamen University,2014.
[11]Skog I,Handel P,Nilsson J O,et al.Zero-Velocity Detection an Algorithm Evaluation[J].Biomedical Engineering,2010,57(11):2657-2666.
[12]萬駿煒,曾慶化,陳磊江,等.行人慣性導(dǎo)航系統(tǒng)平臺設(shè)計與實現(xiàn)[J].計算機應(yīng)用與軟件,2015,32(2):45-47.Wan J W,Zeng Q H,Chen L J,at.al.Design and Implementation of Pedestrian Inertial Navigation System[J].Computer Applica?tions and Software,2015,32(2):45-47.
[13]Jonas C,David T,F(xiàn)redrik G.Probabilistic Stand Still Detection Using Foot Mounted IMU[C]//2010 13th Conference on Informa?tion Fusion(FUSION),2010.
[14]Groves P D.Navigation Using Inertial Sensors[Tutorial][J].Aero?space and Electronic Systems Magazine,IEEE,2015,30(2):42-69.
[15]Jimenez A R,Seco F,Prieto J C,et al.Indoor Pedestrian Naviga?tion Using an INS/EKF Framework for Yaw Drift Reduction and a Foot-Mounted IMU[C]//2010 7th Workshop on Positioning Navi?gation and Communication(WPNC),2010.
孫偉(1984-),男,教授,博士生導(dǎo)師,黑龍江蘿北縣人。2007年于哈爾濱工程大學獲得學士學位,2011年于哈爾濱工程大學獲得博士學位。長期從事慣性導(dǎo)航技術(shù)研究,sunwei-3775235@163.com;

丁偉(1992-),男,四川省巴中市人。現(xiàn)為遼寧工程技術(shù)大學測繪與地理科學學院碩士研究生。從事慣性導(dǎo)航與組合導(dǎo)航方法研究。
Research on Adaptive Gait Optimization Detection Method in Pedestrian Navigation System*
SUN Wei*,DING Wei,LI Ruibao
(School of Geomatics,Liaoning Technical University,F(xiàn)uxin Liaoning 123000,China)
According to that the highly positioning precision of pedestrian navigation system depend heavily on the re?liability and accuracy of gait detection,an adaptive gait detection method was proposed,which adjust parameter based on K-means clustering.Foot motion during walking phases was studied firstly,and analyzed the data characteristics of inertial measurement output acceleration and angular velocity,then proposed gait detection scheme which using the amplify of specific force as its detection basis.The three key parameters,the window size of sliding variance,the ini?tial detection threshold and the time parameter in false correction and their relationship were also analyzed respective?ly,and find out the basic selection rules of the widow parameter and the initial threshold,while the time parameter can be adaptively selected using K-means clustering in order to correct the false detected gait in initial detection result.Five groups walking experiments under different conditions was carried out using laboratory existing MEMS sensors,the experimental results verified the feasibility and effectiveness of the proposed gait detection algorithm.
pedestrian navigation system;gait detection;moving variance;K-means clustering;adaptability
U666.12
A
1004-1699(2016)09-1389-06
項目來源:國家自然科學基金項目(41304032);高等學校博士學科點專項科研基金項目(新教師類)(20132121120005);第8批中國博士后科學基金特別項目(2015T80265);第58批中國博士后科學基金面上項目(2015M581360);遼寧省高等學校杰出青年學者成長計劃項目(LJQ2015044);遼寧省“百千萬人才工程”培養(yǎng)經(jīng)費項目(遼百千萬立項[2015]76號);遼寧省自然科學基金項目(2015020078);江西省數(shù)字國土重點實驗室開放研究基金項目(DLLJ201501);精密工程與工業(yè)測量國家測繪地理信息局重點實驗室開放基金項目(PF2015-13);地球空間環(huán)境與大地測量教育部重點實驗室開放基金項目(14-01-05);對地觀測技術(shù)國家測繪地理信息局重點實驗室開放基金項目(K201401);海島(礁)測繪技術(shù)國家測繪地理信息局重點實驗室項目(2014B05)
2016-02-26修改日期:2016-03-28
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48