極化雷達導引頭對多路徑干擾的檢測識別新方法
2016-10-17 00:51:29戴幻堯黃振宇
雷達學報 2016年2期
關鍵詞:信號
戴幻堯 劉 勇 黃振宇 張 楊
①(電子信息系統復雜電磁環境效應國家重點實驗室 洛陽 471003)
②(航天飛行器生存技術與效能評估實驗室 北京 100085)
極化雷達導引頭對多路徑干擾的檢測識別新方法
戴幻堯*①劉勇②黃振宇①張楊①
①(電子信息系統復雜電磁環境效應國家重點實驗室洛陽471003)
②(航天飛行器生存技術與效能評估實驗室北京100085)
多路徑干擾是對抗機載火控雷達或雷達導引頭的有效自衛干擾方式之一,兼具距離、速度、角度維的欺騙干擾效果,目前對該干擾樣式難以進行有效識別和抑制。該文提出采用極化雷達導引頭工作體制,分析了多路徑干擾對雷達的作用機理,建立了多路徑干擾和直達干擾信號的回波信號正交極化信號模型,提出了基于信號極化相位統計特性差異的多路徑干擾檢測方法。該方法物理內涵清晰,實現簡單,不僅可以判斷干擾信號的存在和類型,還能夠鑒別干擾的極化。通過仿真試驗,驗證了方法的可行性,為有效對抗多路徑干擾提供了有益參考。
多路徑干擾;極化導引頭;信號檢測;極化信號;抗干擾
引用格式:戴幻堯, 劉勇, 黃振宇, 等.極化雷達導引頭對多路徑干擾的檢測識別新方法[J].雷達學報, 2016, 5(2): 156–163.DOI: 10.12000/JR16046.
Reference format: Dai Huanyao, Liu Yong, Huang Zhenyu, et al..Detection and identification of multipath jamming method for polarized radar seeker[J].Journal of Radars, 2016, 5(2): 156–163.DOI: 10.12000/JR16046.
1 引言
現代條件下,飛機面臨著復雜的威脅電磁環境,例如防空警戒雷達、地面跟蹤制導雷達、機載火控雷達、雷達末制導的尋的導彈等,遂行任務的飛機此時必須采取適當的電子對抗措施以躲避威脅。目前,大部分地對空導彈或空空導彈普遍采用雷達導引頭對空中目標進行末制導[1]。為了阻止進攻方的有效探測,防御方(例如飛機)會攜帶干擾機,施放噪聲壓制干擾或欺騙干擾,使機載雷達產生錯誤的速度、距離測量信息。為此,雷達導引頭普遍采用了跟蹤干擾源(HOJ)技術,該技術是將目標發射的干擾信號作為信號源,被動接收干擾信號,從而實現無源被動角度跟蹤與精確測量。跟蹤干擾源技術能夠有效對付施放自衛式噪聲壓制干擾的飛機。多路徑干擾(也稱為對映體干擾)是一種新型的對抗機載火控雷達或彈載雷達的有效自衛干擾方式之一[2–4]。多路徑干擾借助多路徑傳播策略來阻礙雷達截獲干擾機平臺所在的準確位置。干擾機發射信號照射到地面上,并發生了反彈,此時,通過地面反射的干擾信號和真實目標回波都能夠進入導引頭天線,使得導引頭視場角內存在兩個角跟蹤信號,當干擾信號與真實目標回波信號在速度、角度之間的差別難以區分時,就能夠同時形成多維度的欺騙干擾效果,對雷達末制導尋的帶來很大威脅,目前對多路徑干擾未見到有效的對抗措施。雷達極化技術是通過測量天線特性、目標回波、干擾回波和雜波的極化特性,進而提高目標識別和干擾抗干擾能力的一種新型信號與信息處理技術[5,6],是除了傳統時域、頻域、空域信號處理以外一個新的可資利用和發展的技術領域,逐漸受到重視和發展。文獻[7,8]從極化敏感的角度分析了空間兩點源對單脈沖雷達測角系統的影響模型,采用同時極化發射同時接收的體系結構和極化濾波處理可能有助于抑制轉發式干擾。上述極化處理方法并未考慮低空突防的外部環境以及電波傳播路徑的影響,更多考慮的是直達干擾信號在完全極化條件下信號濾波的問題。本文首先分析了多路徑干擾對雷達導引頭作用機理,設計了一種雙極化導引頭的結構,建立了多路徑干擾和直達干擾信號的正交極化回波信號模型,根據雜波的后向散射理論,提出了基于信號極化相位統計特性差異的多路徑干擾檢測方法。該方法不僅可以判斷是否受到干擾,快速識別多路徑干擾信號,還能夠鑒別干擾信號的極化。通過仿真試驗,驗證了方法的可行性,為有效對抗多路徑干擾提供了有益參考。
2 多路徑干擾機理
多路徑干擾原理如圖1所示,是作戰飛機在進行低空突防時如果遭遇雷達制導的硬殺傷武器,為了自衛防護常采用的一種自衛式有源電子干擾。雷達制導武器在末制導階段多采用主動脈沖多普勒體制的導引頭,在多路徑干擾釋放之前,作戰飛機主動降低自身高度,迫使雷達導引頭波束工作于下視狀態。假設干擾信號在地面發生反射,當雷達導引頭B向目標(A)方向發射電磁波信號,飛機A攜帶的機載自衛干擾設備接收、復制、放大導引頭雷達信號并調制后形成干擾信號,由專用天線向地面發射,到達地面后發生反彈,產生多路徑干擾。多路徑干擾信號進入導引頭接收系統。同時進入導引頭雷達系統的信號還有目標的真實反射回波信號或直達干擾信號。如果干擾信號功率強于目標真實反射回波信號功率,且干擾信號與目標真實反射回波所攜帶的一種以上信息(距離、速度、角度)之間的差別不足以使導引頭雷達將干擾信號和真實反射回波信號區別開,雷達自動增益控制系統就會跟蹤較強回波信號,也就是把目標回波方向判斷為功率較強的BG方向,將目標確定為飛機A在地面下的鏡像機A',則制導導彈的命中點將會是圖1中G點。
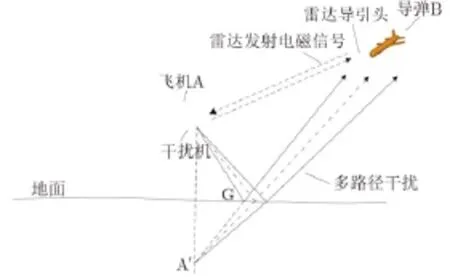
圖1 多路徑干擾的原理示意圖Fig.1 Schematic diagram of multipath interference
多路徑干擾信號從地面方向進入雷達導引頭,導引頭的天線波束一般都比較窄,當目標位于導引頭下視或正視方向時,進入的干擾信號強度足夠大。同時,多路徑干擾效果除由干擾機發射功率決定外,還由地面對干擾信號的反射特性決定,在不同季節、時間、溫度、照射方向條件下,其干擾效果也存在差異。可以推斷,A釋放干擾的時候,進入B系統的信號有兩個:真實回波信號和多路徑干擾信號。干擾信號是雷達發射信號經過射頻存儲延遲轉發生成的,則干擾信號與雷達發射信號保持相干,并且當滿足一定空間關系時,可以實現對速度、距離、角度3個通道的同時干擾。因此,導引頭B或火控雷達就面臨真假目標回波識別的問題。極化域是時域、頻域、空域之外又一個可以挖掘利用的信息域,第3節給出一種新穎的基于極化技術的多路徑干擾信號識別方法。
3 雙極化導引頭對多路徑干擾的極化識別方法
3.1多路徑干擾回波信號建模
干擾機發射信號照射到地面上,產生多路徑干擾。發射的干擾信號最初可以是任何極化方式。但是由于地面不是像金屬、玻璃一樣的光滑表面,照射到地面上的任何信號都將被去極化,因此多路徑干擾信號的極化相位差通常是隨機的。
對于直達干擾信號,主極化和交叉極化通道的接收信號如式(1)所示:

式中,Ex, Ey是干擾機發射的水平和垂直極化分量信號;n1, n2是兩個分量的熱噪聲分量;θ是導彈的橫滾角,當θ=0時,天線照射方向與導引頭發射極化方向一致。一般而言,Ex, Ey是同相的線極化信號,不考慮熱噪聲的影響,S1, S2也應是同相的。
對于多路徑干擾信號,主極化和交叉極化通道的接收信號可表示為

式中,cyy, cyx, cxy, cxx為地形雜波后向散射系數,系數下標的第1個字母代表發射極化,第2個字母代表接收極化。在滿足互易性條件下:cyx=cxy。
根據雜波的后向散射理論可知,雜波后向散射以非相干散射為主[9],即電磁波的相位是隨機的,并且在2p區間均勻分布的,稱之為非相干。雜波的散射截面積可以表示如下:
其中,σi是獨立散射體的RCS, φi是各獨立散射體的相位。相位因子包含了反射造成的相位變化,以及雷達距離導致的相位延遲。舉一個簡單的例子,如果所有的散射體具有同樣的散射能量(即σi=σ),
對非相干散射,得到:
對相干散射,當所有散射體同相時,
因此,如果雜波區域有10個散射截面積為σ=1 m2的散射體,根據雜波的散射類型,最終雜波區的RCS會在10 m2~100 m2區間隨機變化。
總的來說,雜波的散射特性取決于入射電磁波的極化,以及散射體的表面特性。雜波的極化散射矩陣用RCS表示如下:


地雜波參量模型提供了一種適用于有大量地面雜波試驗采樣數據的經驗模式,可用于平均后向散射系數(σ0),參量模型如下:
式中,ψ為掠射角(rad), σh為地表面標準方差(cm),λ為雷達波長,A, B, C和D為經驗常數[10,11]。該模型提供的是擦地角、表面粗糙度和頻率的函數,可用于包括土壤、草地、樹林、沙地、巖石、城市、雪地等多種類型的地雜波[12]。參數A, B, C和D的值可參考文獻[11]。
從上述分析可以看出,多路徑干擾信號的回波幅度、相位與地形特性有關,并且干擾信號主極化和交叉極化分量間的相位差是隨機的,而直達干擾信號的極化相位差是確定的。通過分析接收信號的極化相位差是否服從一定的隨機分布,就可以判斷雷達接收信號是否受到干擾,且干擾信號是直達干擾還是多路徑干擾,有助于雷達采取進一步的抗干擾措施。
3.2多路徑干擾信號的極化識別方法
利用極化相位特性,來進行多路徑干擾檢測,需要在雷達系統中安裝正交雙極化天線和雙通道接收機。雙極化通道接收機與正交雙極化天線相連,能夠同時接收回波信號的水平極化和垂直極化分量,如圖2所示。接收機的主極化通道允許接收與發射信號極化方式近似一致的回波信號,交叉極化通道接收與主極化通道相正交的信號。
將主極化和交叉極化兩個接收通道的回波信號分成多個距離單元,每個距離單元相當于一個特殊的時間窗,代表目標的距離。處理器對每個距離單元進行時間采樣,并對每個距離單元內的信號進行多普勒濾波組處理。類似于大多數脈沖多普勒雷達,多普勒濾波器組補償了信號回波由于目標與雷達系統相對運動產生的多普勒頻移。內部處理器根據兩個通道每個距離單元的多普勒濾波器組輸出的相位值,計算對應濾波器組輸出的相位差;然后計算該距離單元的相位差均值和標準差。假設為距離單元內第i個多普勒濾波器輸出的相位差,m為距離單元內多普勒濾波器個數,n為每個通道的距離單元個數,那么兩接收通道在各個距離單元上的相位差均值和標準差可以通過下式計算得到:
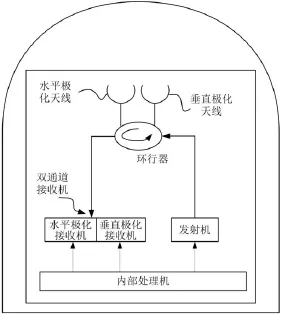
圖2 雙極化雷達導引頭結構示意圖Fig.2 Structure of dual polarization radar seeker
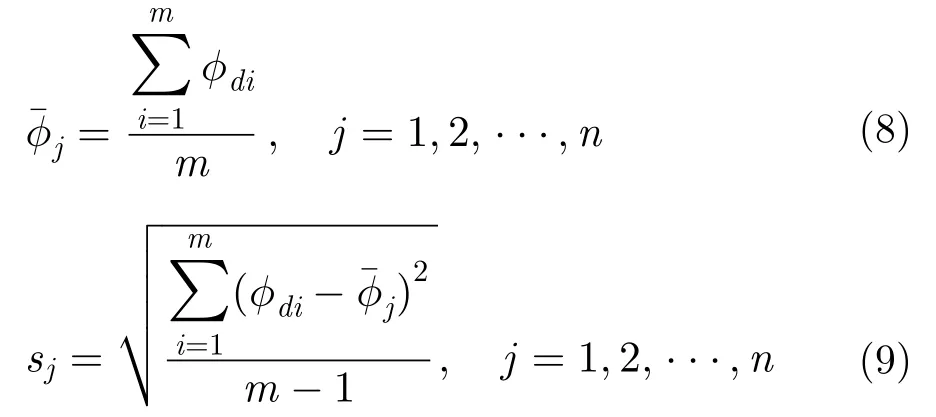
然后,對所有距離單元求得的相位差均值和相位差標準差再取均值,如下式所示:
建立如下干擾識別原則:
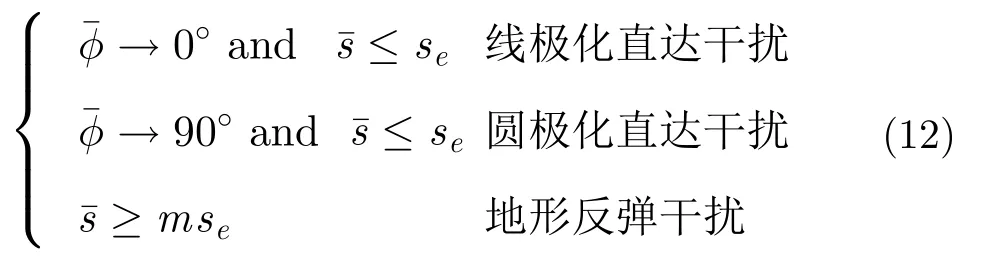
式中,se為直達干擾相位差判定精度的經驗值,m=2或3。當小于判定精度時,若接近0°,則判定干擾信號為直達干擾,極化方式為線極化;若接近90°,則判定干擾信號為直達干擾,極化方式為圓極化。反之,如果很大,達到了判定精度的2~3倍,則判定干擾信號為多路徑干擾。
3.3多路徑干擾的識別流程設計
(1)記錄發射信號極化方式
雷達導引頭向期望目標發射雷達探測信號的同時其內部處理器記錄發射信號的極化特性。
(2)接收回波信號
雷達導引頭通過正交雙極化天線以及雙通道接收機接收回波信號。接收到的回波信號可能包括真實目標回波,干擾機發射的直達干擾信號以及多路徑干擾信號。接收機的主極化通道允許接收與發射信號極化方式一致的回波信號,交叉極化通道接收與主極化通道相正交的信號。
(3)判定是否存在干擾
雷達導引頭中的處理器分析接收機通道接收到信號的極化方式。期望目標的表面回波應保留發射信號的極化特征,如果交叉極化通道接收到可測的交叉極化回波信號,處理器就認為接收信號與發射信號的極化方式不同,確定存在干擾信號,并進一步判定干擾類型。否則,處理器就判定干擾不存在,繼續對回波進行常規的信號處理。
(4)確定干擾類型
一旦發現干擾存在,處理器根據接收信號的極化相位特性來識別多路徑干擾。如果處理器分析接收信號相位差是隨機的,就判定存在多路徑干擾,否則處理就判定存在直達干擾。然后處理器啟動相應的抗干擾程序,重新獲取目標的真實回波。
圖3所示為雷達多路徑干擾極化識別方法的仿真流程。
4 仿真試驗
根據本文提出的方法,進行了不同類型干擾信號下的仿真對比試驗。仿真試驗中,X波段雷達導引頭采用高重頻模式,PRF=300 kHz,脈寬為3 μs,最大占空比為0.44,迎頭飛機目標RCS約為10 m2,采用數字式多普勒濾波器組,對每一個回波脈沖采用8點FFT處理,干擾機發射功率是雷達導引頭發射功率的2倍,分別采用圓極化,45°線極化。彈目的水平投影距離約為20 km,圖4–圖9為試驗結果。通過試驗結果對比可以看出,直達干擾信號和多路徑信號的極化特征具有明顯的統計特性差異,在不同的距離單元,對于直達干擾,垂直極化與水平極化信號的相位差更加集中,分布標準差較小,而對于多路徑干擾,垂直極化與水平極化信號的相位差分布較廣,標準差較大,可以通過本文發明方法區分這兩種信號。
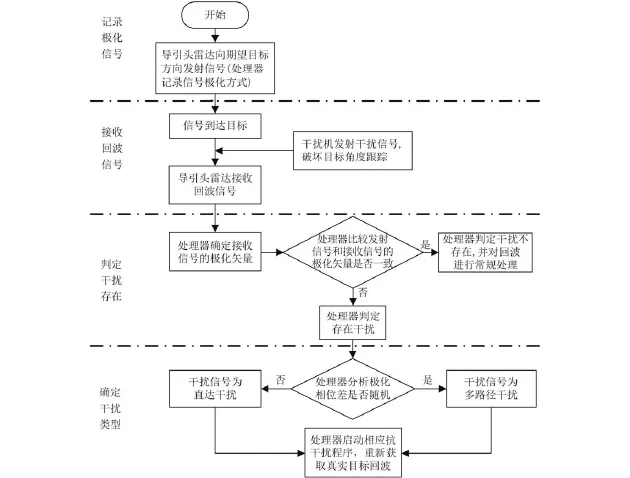
圖3 極化雷達導引頭對多路徑干擾識別處理流程Fig.3 Identification processing flow of multi path jamming for polarization radar seeker
圖4、圖6分別為45°斜線極化直達干擾、圓極化直達干擾在干噪比JNR=30 dB、導引頭的橫滾角θ=30°時,計算機仿真得到的1024個距離單元的相位差統計分布。其中,45°斜線極化時仿真結果為:相位差均值0.0153°,相位差標準差為7.4432°; 圓極化時仿真結果為:相位差均值為90.1088°,相位差標準差為3.5787°。可以看出,在1024個距離單元,直達干擾的垂直極化與水平極化信號的相位差更加集中,分布標準差較小。
圖5、圖7分別為45°斜線極化直達干擾、圓極化直達干擾相位差標準差統計值與干噪比的關系曲線,其中JNR=15~40 dB,隨著干擾信號功率的不斷增大,標準差統計值也由大到小逐漸趨于穩定,在5°范圍內。

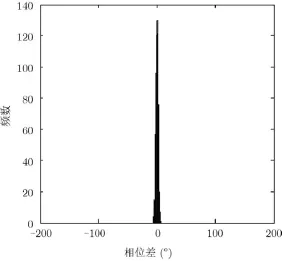
圖4 45°斜線極化直達干擾極化均值統計直方圖Fig.4 Polarization mean histogram of 45° oblique polarization direct interference
圖9為45°斜線極化在圖8所示地形時產生的多路徑干擾。干噪比JNR=30 dB,導引頭的橫滾角,計算機仿真得到的1024個距離單元的相位差統計分布,相位差均值為4.1829°,相位差標準差為87.9125°。可以看出,在1024個距離單元,多路徑干擾的垂直極化與水平極化信號的相位差分布范圍廣,分布標準差較大。
圖10為多路徑干擾相位差標準差統計值與干噪比的關系曲線,其中,JNR=15~40 dB,隨著干擾信號功率的不斷增大,標準差的統計值很大,且變化范圍不大,保持在87°左右。
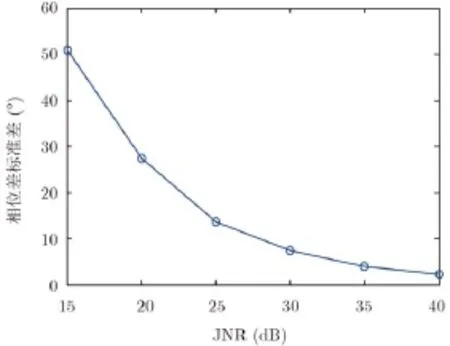
圖5 45°斜線極化直達干擾極化標準差性能曲線Fig.5 Standard deviation performance curve of 45° oblique polarization direct jamming
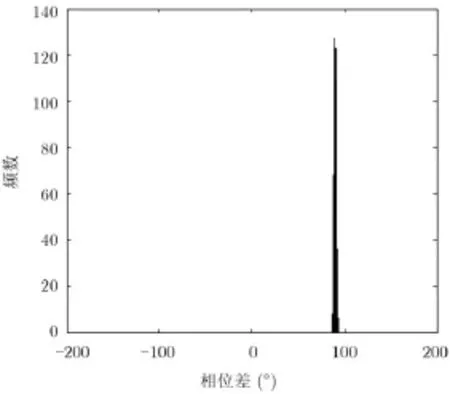
圖6 圓極化直達干擾極化均值統計直方圖Fig.6 Polarization means histogram of circular polarization direct interference
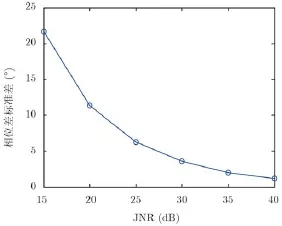
圖7 圓極化直達干擾極化標準差性能曲線Fig.7 Standard deviation performance curve of circular polarization direct jamming
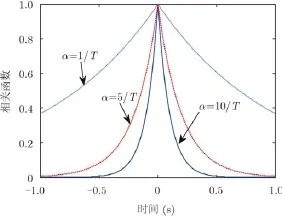
圖8 地面雜波散射系數Fig.8 Ground clutter scattering coefficient
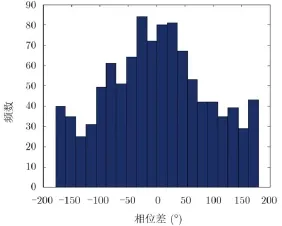
圖9 45°斜線極化多路徑干擾極化均值統計直方圖Fig.9 Polarization mean histogram of 45° oblique polarization multipath jamming
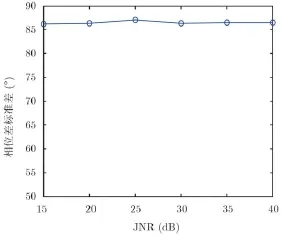
圖10 45°斜線極化多路徑干擾極化標準差性能曲線Fig.10 Standard deviation performance curve of 45° oblique polarization multipath jamming
通過大量仿真試驗結果對比可以看出,直達干擾信號和多路徑信號的極化相位差特征具有明顯的統計特性差異,在不同的距離單元,無論是45°線極化的直達干擾,還是圓極化的直達干擾信號,其垂直極化分量與水平極化分量的相位差更加集中,且分布標準差較小。而對于多路徑干擾,垂直極化與水平極化分量的相位差分布較廣,標準差較大,通過本文給出的方法可以較好地識別出多路徑干擾信號,并且能夠識別出直達干擾信號的極化方式,這就能夠改善雷達導引頭適應復雜電磁環境的能力,特別是為多路徑干擾條件下正確跟蹤真實目標提供了有效的技術手段。
5 結論
本文圍繞多路徑干擾展開研究,分析了多路徑干擾對雷達的作用機理,建立了多路徑干擾和直達干擾信號的回波信號正交極化信號模型,提出了基于信號極化相位統計特性差異的多路徑干擾檢測方法。該方法物理內涵清晰,算法實現簡單,不僅可以判斷是否受到干擾,并判斷干擾信號的類型方式,還能夠鑒別干擾信號的極化。通過仿真試驗,驗證了方法的可行性,為有效對抗多路徑干擾提供了有益參考。該方法可以應用于飛機火控雷達、巡航導彈末制導雷達以及多種信號探測、識別、跟蹤裝置中,快速識別多路徑干擾信號,提高系統的抗干擾能力。
[1]Wang Liandong, Dai Huanyao, and Yang Hui.A novel pulsed Doppler radar seeker modeling method used for closed loop trajectory simulation[J].IEICE Electronics Express, 2014, 11(22): 1–10.
[2]平殿發, 張偉, 蘇峰.機載對映體干擾有效性分析[J].雷達科學與技術, 2014, 12(3): 235–239.Ping Dianfa, Zhang Wei, and Su Feng.Airborne imagejamming efficiency analysis[J].Radar Science and Technology, 2014, 12(3): 235–239.
[3]李勇, 葉志銓.對映體干擾原理及影響干擾效果的因素分析[J].電子信息對抗技術, 2006, 21(5): 29–32.Li Yong and Ye Zhiquan.Analysis of image-jamming rationale and factors effecting the effectiveness[J].Electronic Information Warfare Technology, 2006, 21(5): 29–32
[4]高彬, 毛士藝, 孫進平, 等.對映體干擾作戰效能仿真評估[J].彈箭與制導學報, 2010, 30(4): 223–226.Gao Bin, Mao Shiyi, Sun Jinping, et al..Simulation measures of efficiency for terrain bounce jamming[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2010, 30(4): 223–226.
[5]Dai H Y, Wang X S, and Li Y Z.Main-lobe jamming suppression method of using spatial polarization characteristics of antenna[J].IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2167–2179.
[6]Dai H Y, Wang X S, Luo J, et al..A new polarimetric method by using spatial polarization characteristics of scanning antenna[J].IEEE Transactions on Antennas and Propagation, 2012, 60(3): 1653–1656.
[7]張思遠, 李永禎, 肖順平.空間兩點源的單脈沖測角極化響應研究[J].雷達科學與技術, 2015, 13(5): 467–472.Zhang Siyuan, Li Yongzhen, and Xiao Shunping.Polarimetric response for dual-point sources in monopulse angular measurement system[J].Radar Science and Technology, 2015, 13(5): 467–472.
[8]李永禎, 胡萬秋, 陳思偉, 等.有源轉發式干擾的全極化單脈沖雷達抑制方法研究[J].電子與信息學報, 2015, 37(2): 276–282.Li Yongzhen, Hu Wanqiu, Chen Siwei, et al..Active repeater jamming suppression using polarimetric monopulse radar[J].Journal of Electronics & Information Technology, 2015, 37(2): 276–282.
[9]Morris G V.Airborne Pulse Doppler Radar [M].Beijing: Aviation Industry Publishing House, 1990, 12.
[10]Eaves J and Reedy E.Principles of Modern Radar[M].New York: Van Nostrand Reinhold, 1987.
[11]戴幻堯, 申緒澗, 趙晶, 等.動目標顯示與脈沖多普勒雷達[M].國防工業出版社, 2016, 1.Dai Huanyao, Shen Xujian, Zhao Jing, et al..MTI and Pulsed Doppler Radar with MATLAB[M].National Defend Industry Press, 2016, 1.
[12]韋順軍, 師君, 張曉玲, 等.基于曲面投影的毫米波InSAR數據成像方法[J].雷達學報, 2015, 4(1): 49–59.Wei Shunjun, Shi Jun, Zhang Xiaoling, et al..Millimeterwave interferometric synthetic aperture radar data imaging based on terrain surface projection[J].Journal of Radars, 2015, 4(1): 49–59.

戴幻堯(1982–),男,博士,助理研究員,IEEE Member,2011年獲國防科學技術大學博士學位,主持或參與國家自然科學基金、預研基金、863等科研項目10余項,合作出版專著、譯著3部,發表論文70余篇。研究方向為雷達干擾、抗干擾新技術。
E-mail: leoneast@sina.com

劉勇(1982–),男,博士,助理研究員,2010年獲國防科學技術大學博士學位,主要研究方向為導彈攻防對抗。
黃振宇(1982–),男,碩士,工程師,主要研究方向為電子信息系統仿真與評估。
張楊(1982–),女,碩士,助理研究員,主要研究方向為雷達對抗技術。
Detection and Identification of Multipath Jamming Method for Polarized Radar Seeker
Dai Huanyao①Liu Yong②Huang Zhenyu①Zhang Yang①
①(State Key Laboratory of Complex Electromagnetic Environment Effects on Electronics and Information System, Luoyang 471003, China)
②(The Institute of Effectiveness Evaluation of Flying Vehicle, Beijing 100085, China)
Multipath jamming is an effective self-defense jamming mode used to counter airborne fire-control radar or radar seekers.Multipath jamming has a deceptive jamming effect on the range, velocity, and angle of radar, making it difficult to identify and suppress.In this study, a polarized radar seeker structure is proposed.Based on the mechanism of the multipath jamming effect on radar, orthogonal polarization signal models of jamming and direct arrived signal are established.Next, a method to detect multipath jamming based on statistical property differences of polarization phases is proposed.The physical connotation of this method is clear and easy to realize.This method can be used to determine the presence of a jamming signal and identify the signal pattern and polarization types.The feasibility of this method has been verified via a simulation experiment, thereby demonstrating that the method serves as a useful reference for effectively countering multipath jamming.
Multipath jamming; Polarized radar seeker; Signal detection; Polarization signal; Ant-jamming
TN95
A
2095-283X(2016)02-0156-08
10.12000/JR16046
2016-03-01;改回日期:2016-04-10;網絡出版:2016-04-22
戴幻堯leoneast@sina.com
國家自然科學基金(61301236, 61401469)
Foundation Items: The National Natural Science Foundation of China (61301236, 61401469)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06